
Experimental Investigation on the Transfer Behavior and Environmental Influences of Low-Noise Integrated Electronic Piezoelectric Acceleration Sensors



Abstract
:1. Introduction
2. Piezoelectric Accelerometer
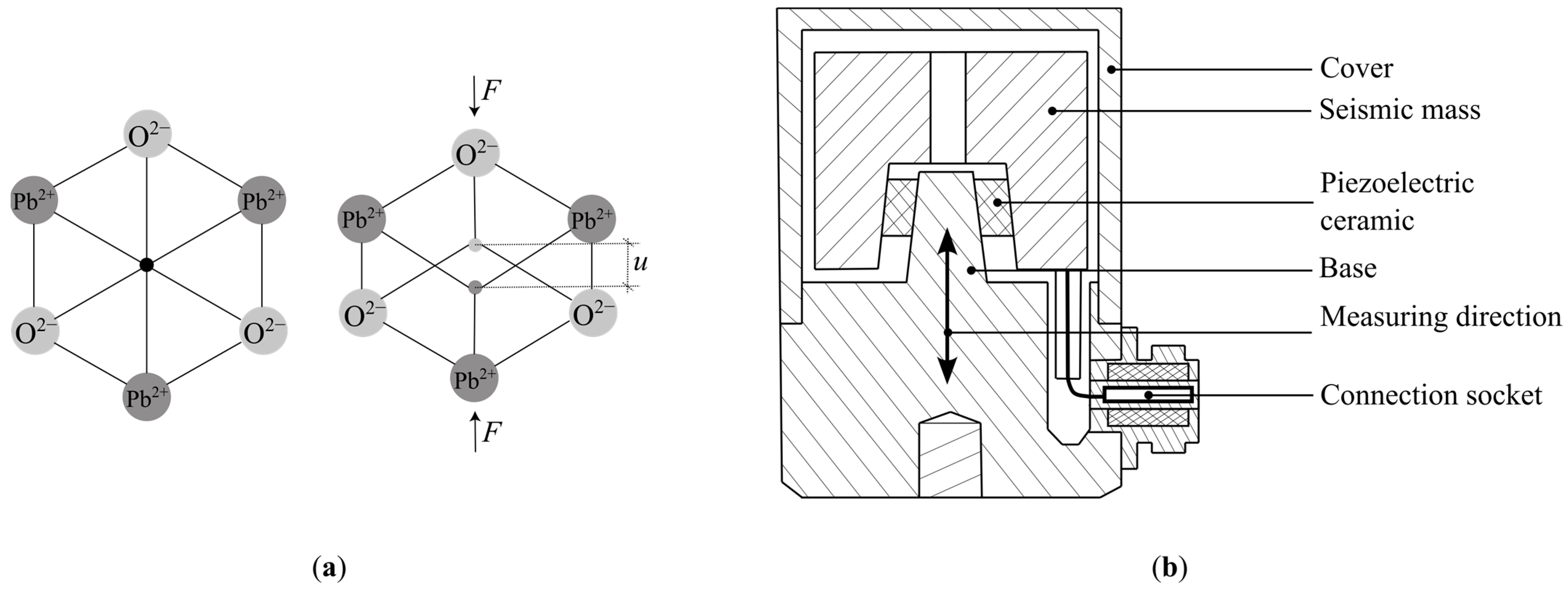
2.1. Measuring Principle
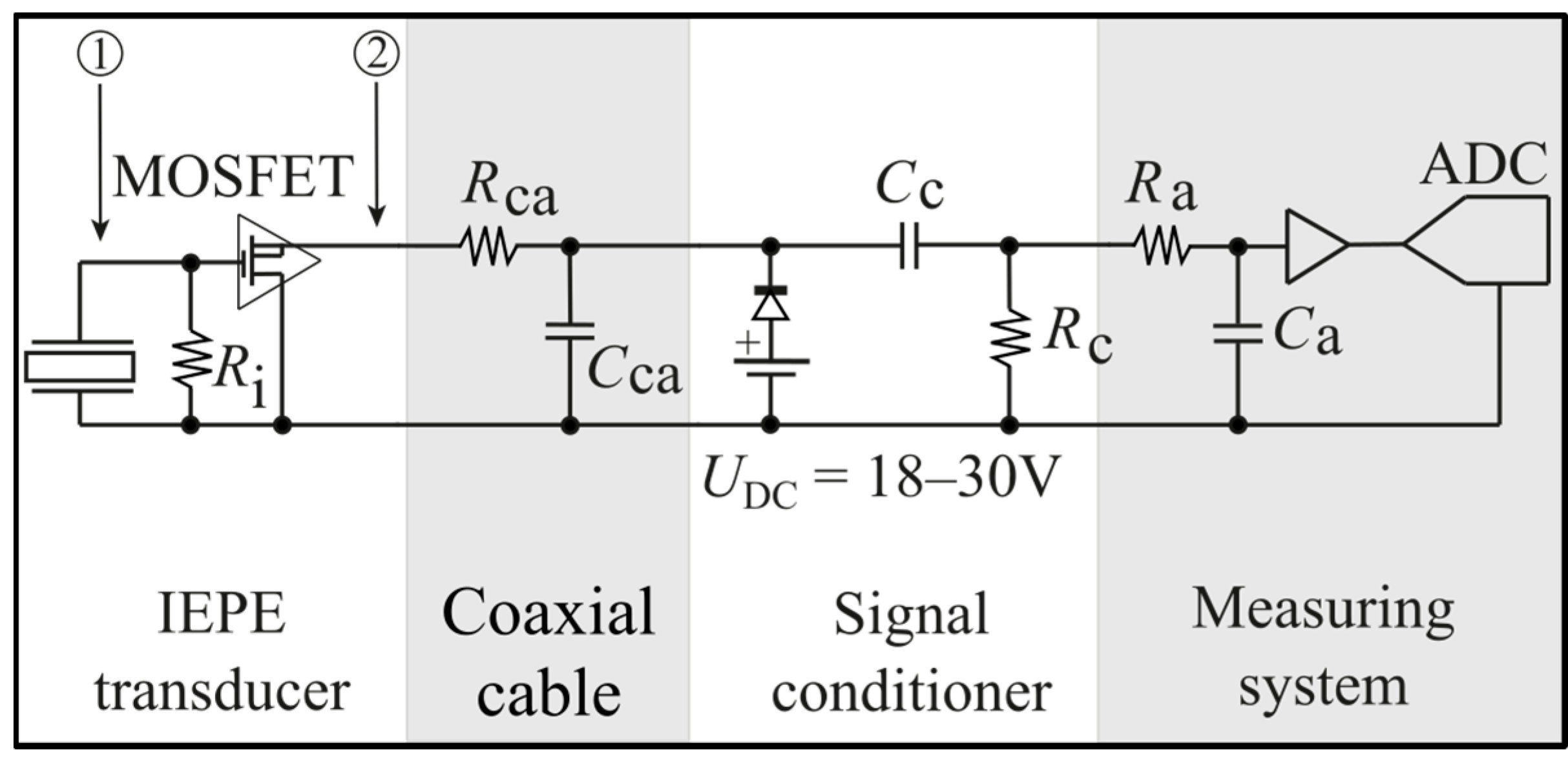
2.2. Signal Conditioning
3. Sensor Calibration: Experimental Setup and Execution
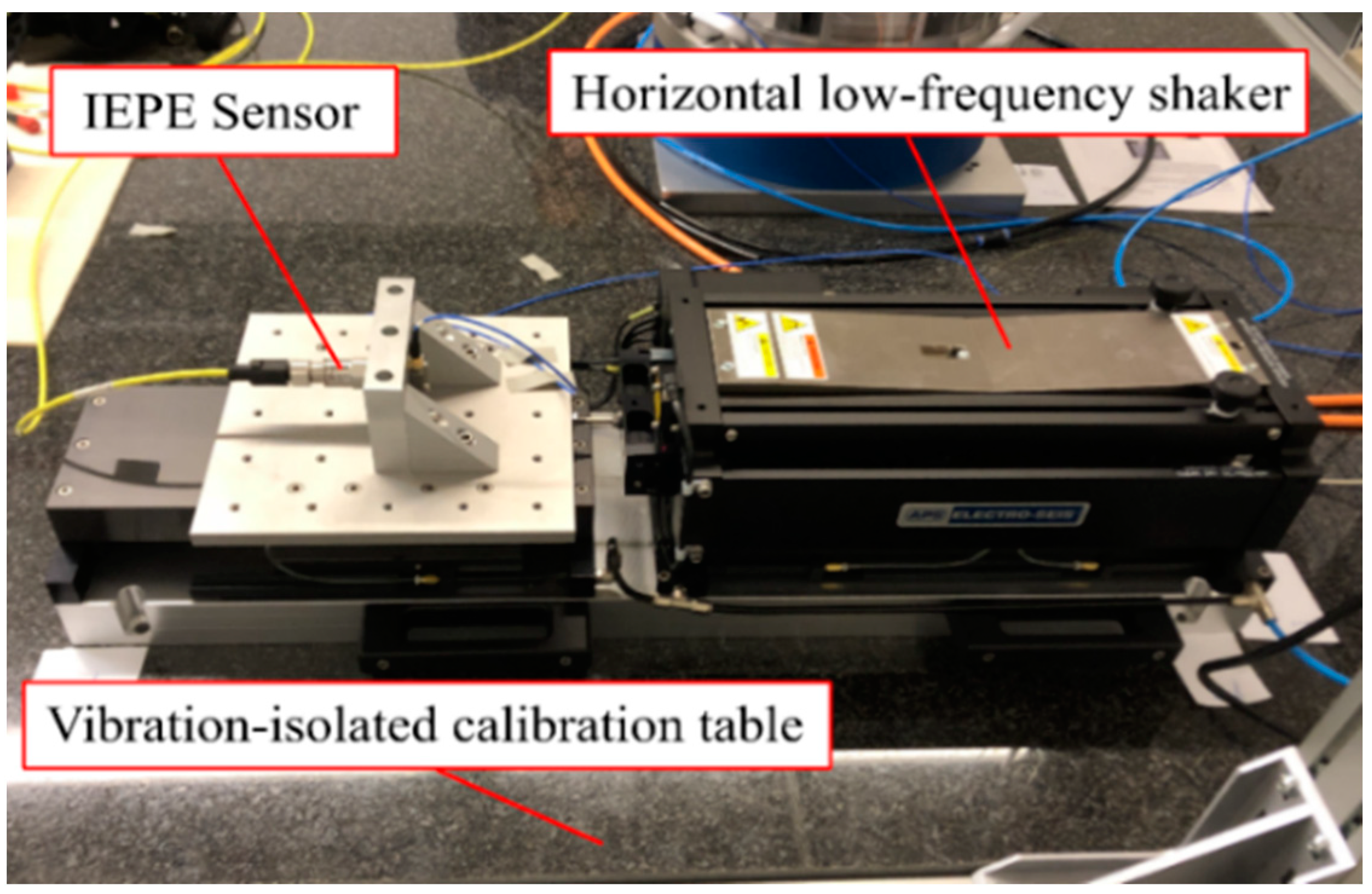
3.1. Experimental Setup of the Standardized BAM Calibration Station
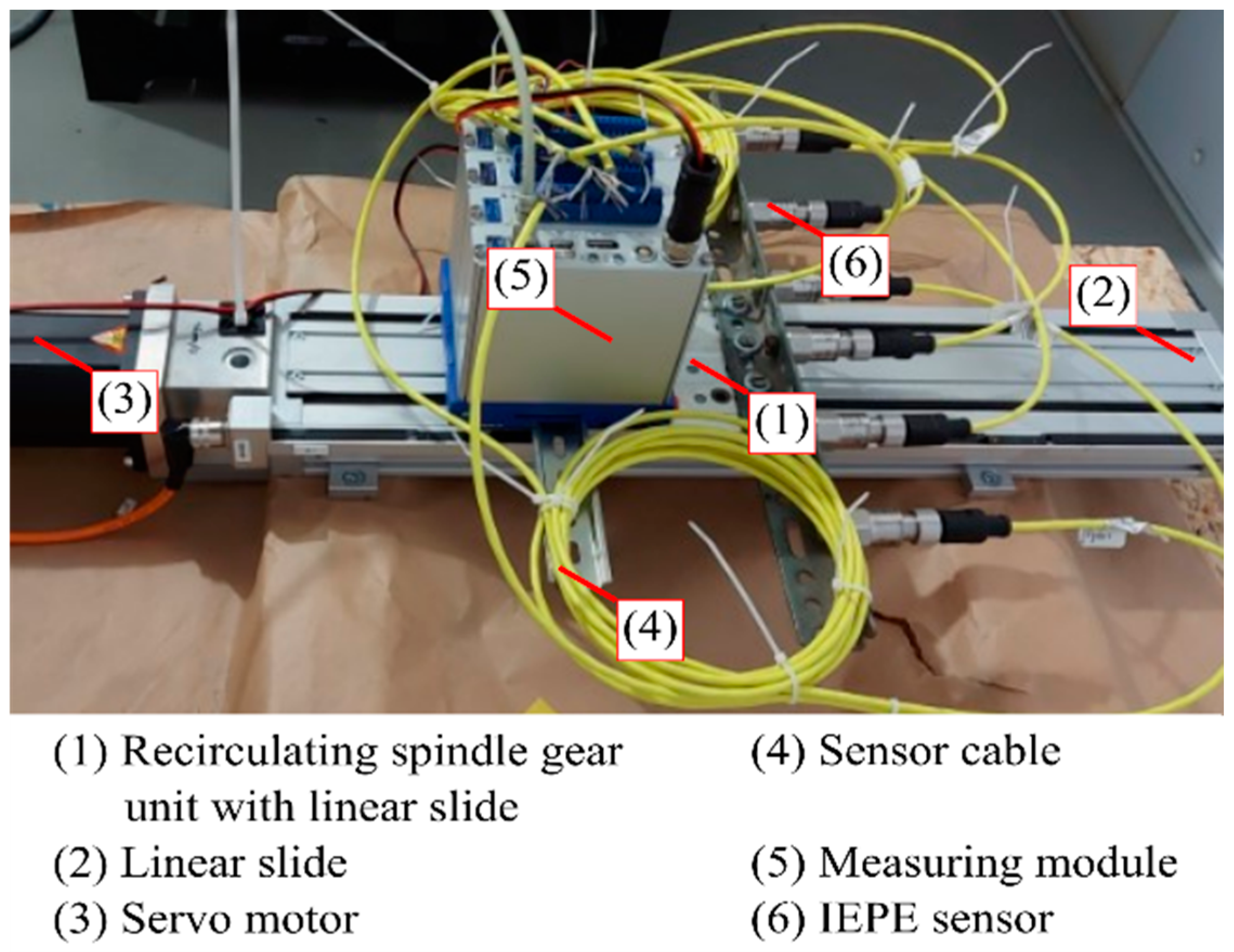
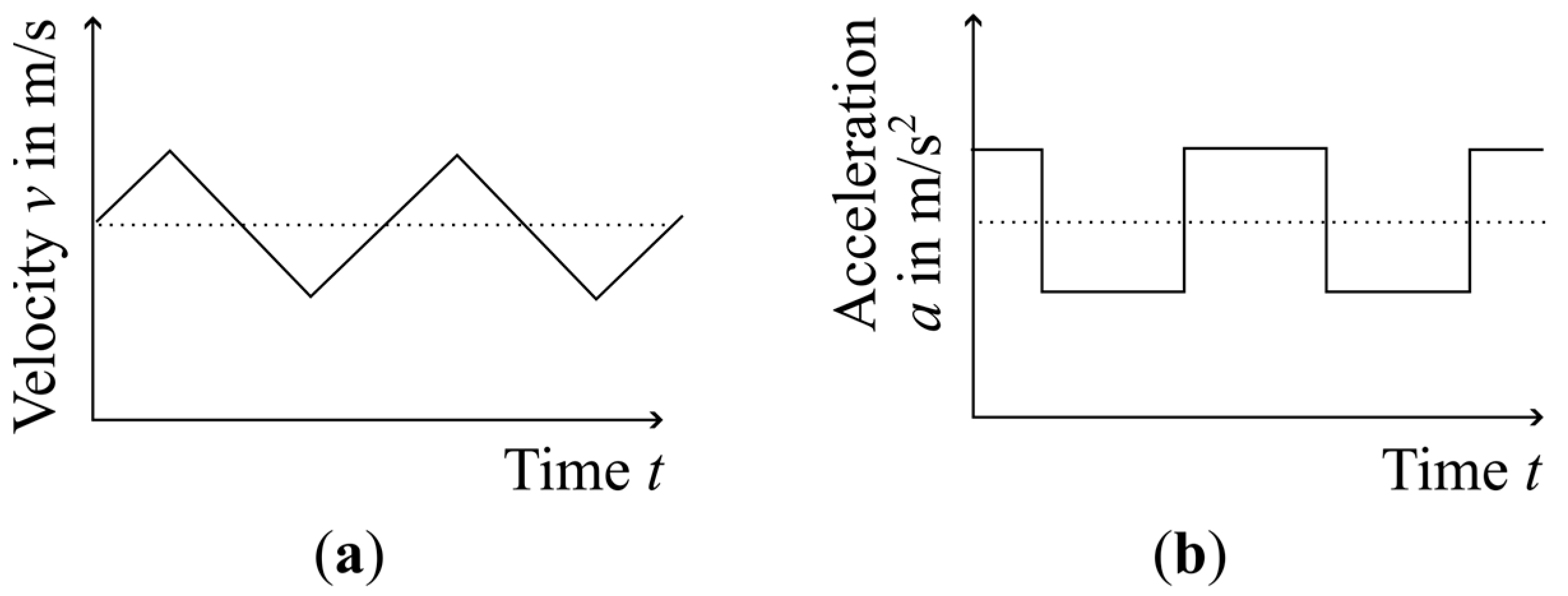
3.2. Experimental Setup of the Linear Unit
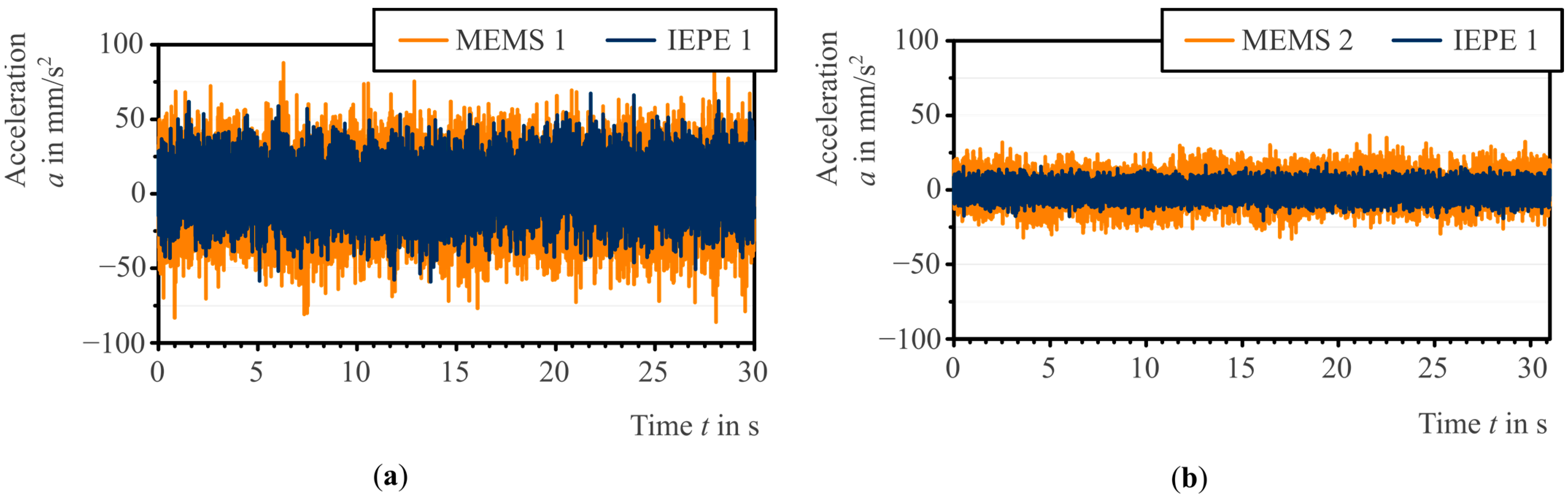
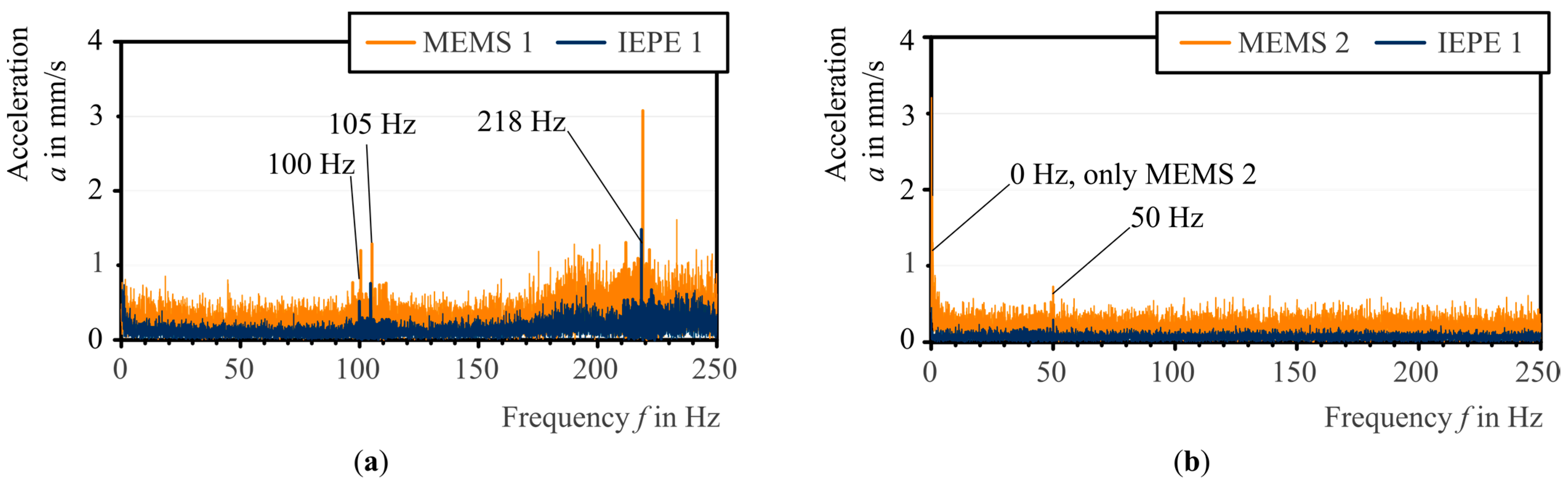
3.3. Noise Analysis
3.4. Reference Measurement with Standardized Calibration Station
3.5. Comparison with a Simplified Calibration Unit
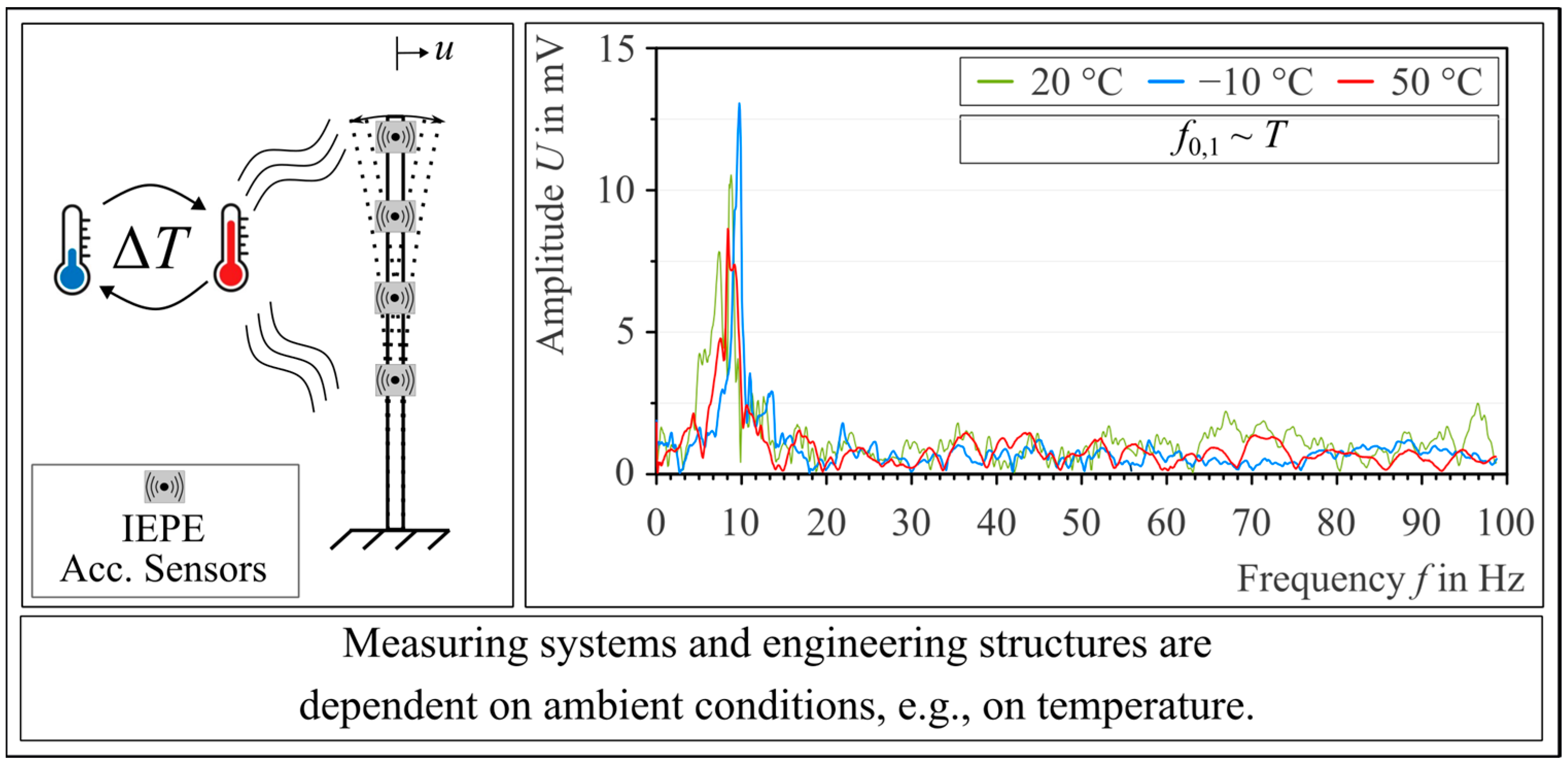
4. Systematic Environmental Influences on the IEPE Frequency Response
4.1. Temperature Influence on IEPE Frequency Response
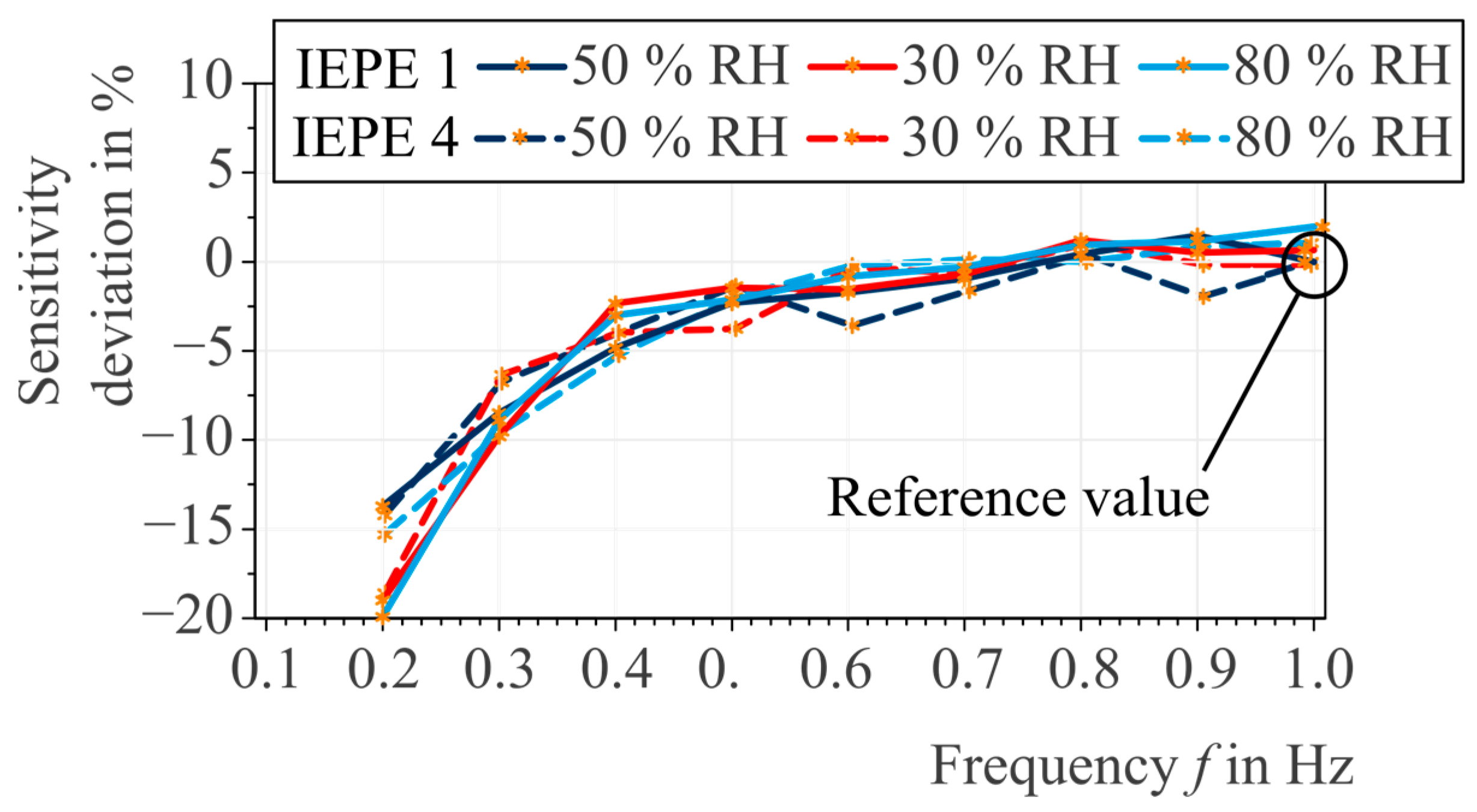
4.2. Air Humidity Influence on IEPE Frequency Response
5. Case Study
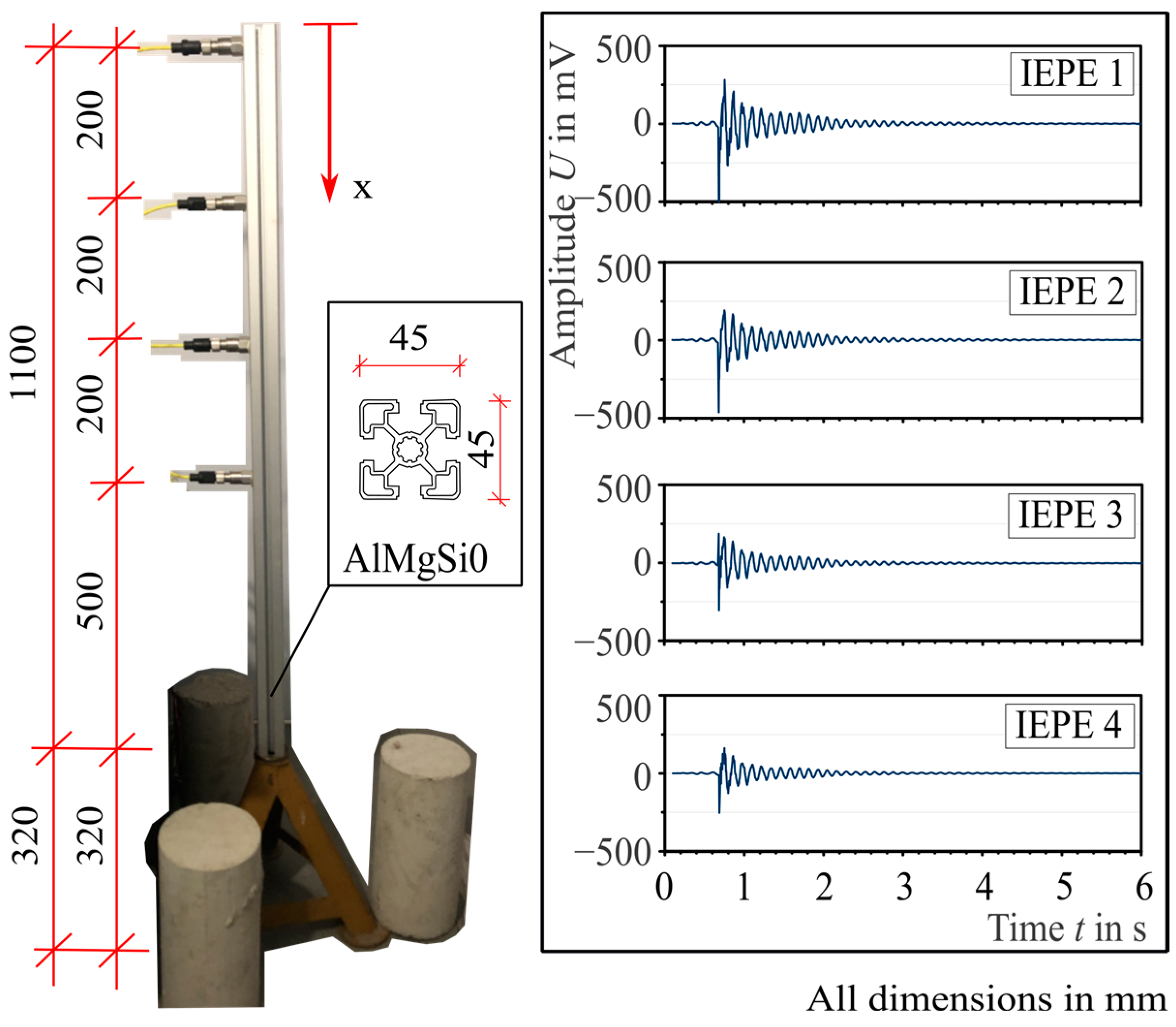
5.1. Experimental Setup and Data Acquisition
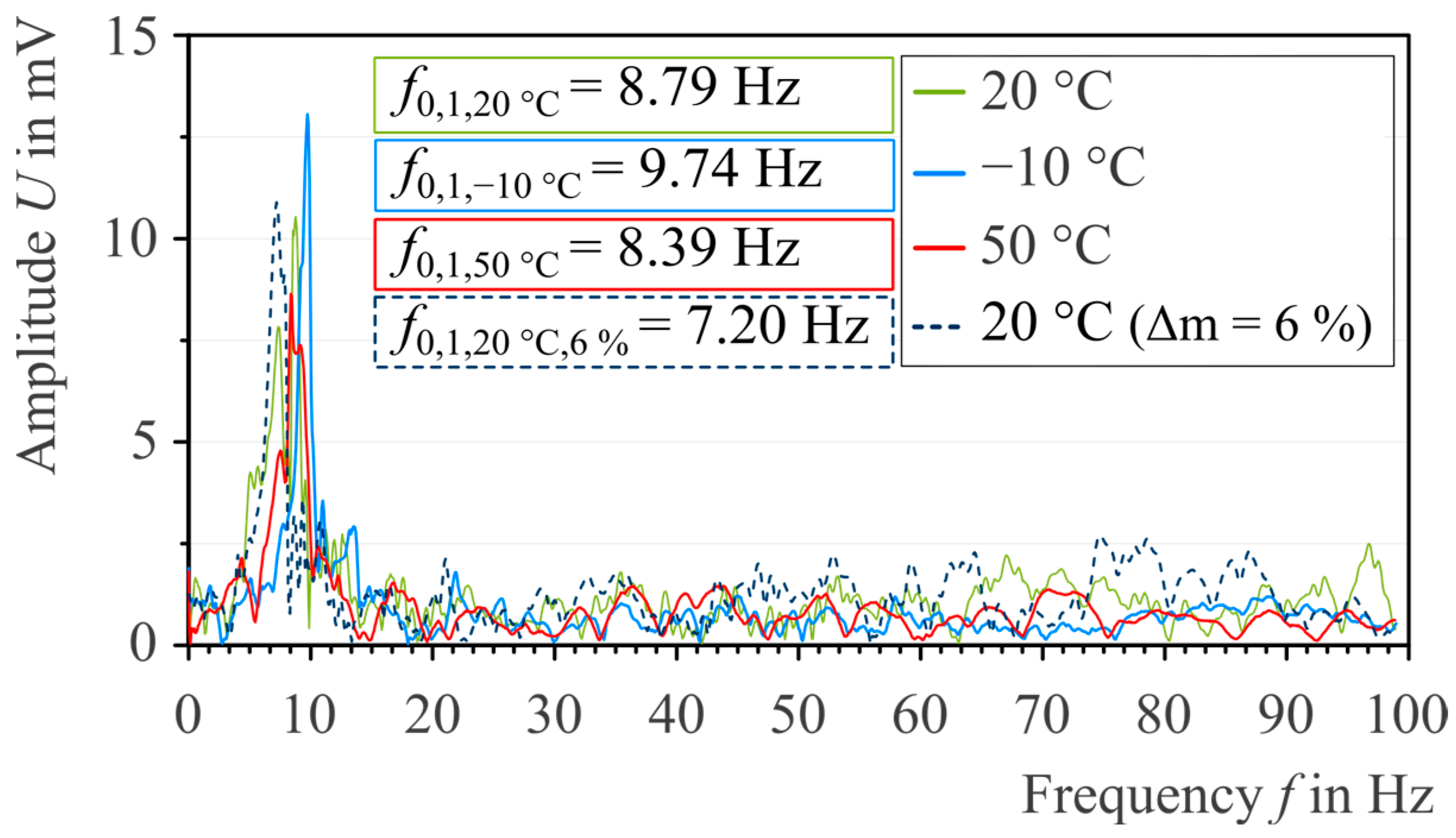
5.2. Data Analysis and Evaluation with Signal Energy Method
6. Discussion and Outlook
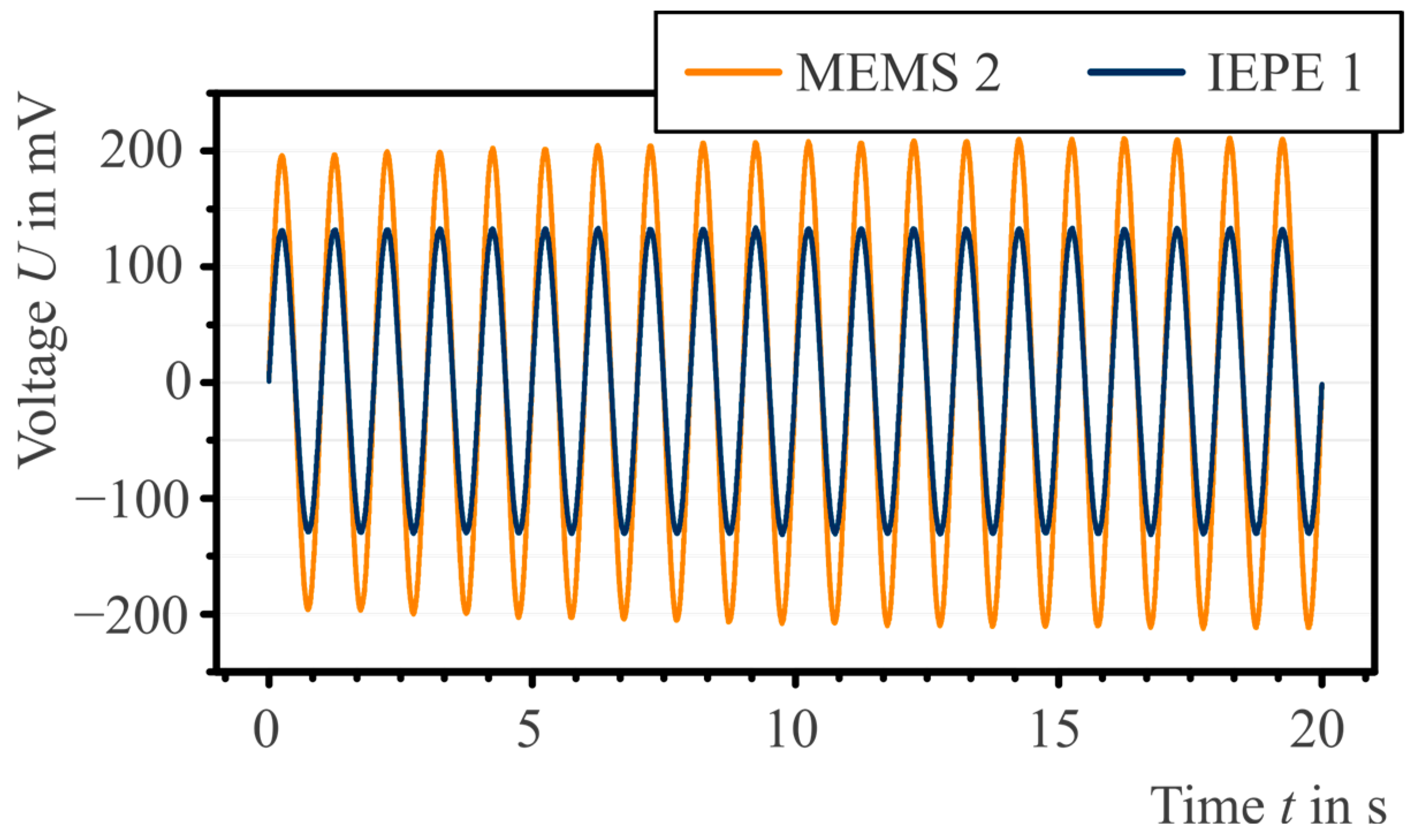
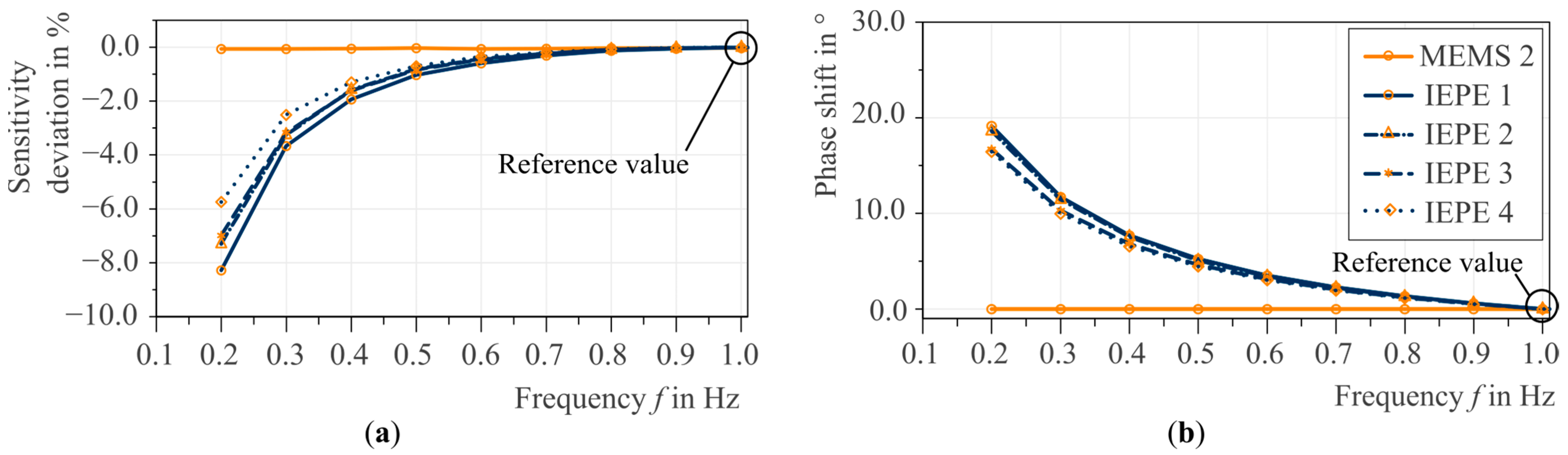
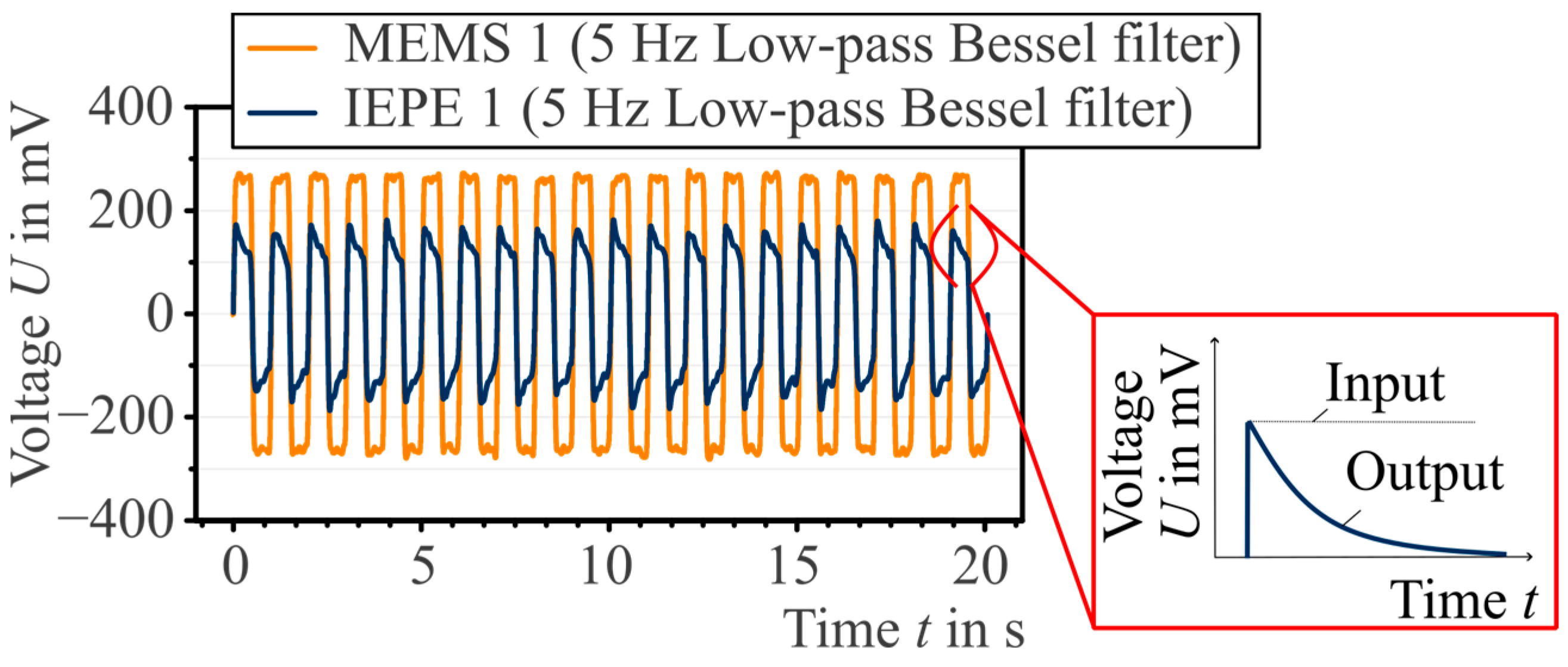
- IEPE sensors have a non-linear transmission behavior, which ideally must be determined by sensor-specific calibration using a horizontal low-frequency shaker. MEMS sensors have the advantage of linear transmission behavior; however, a significant disadvantage of MEMS sensors is the high noise level. Thus, IEPE sensors are recommended for low-frequency acceleration measurement in engineering fields.
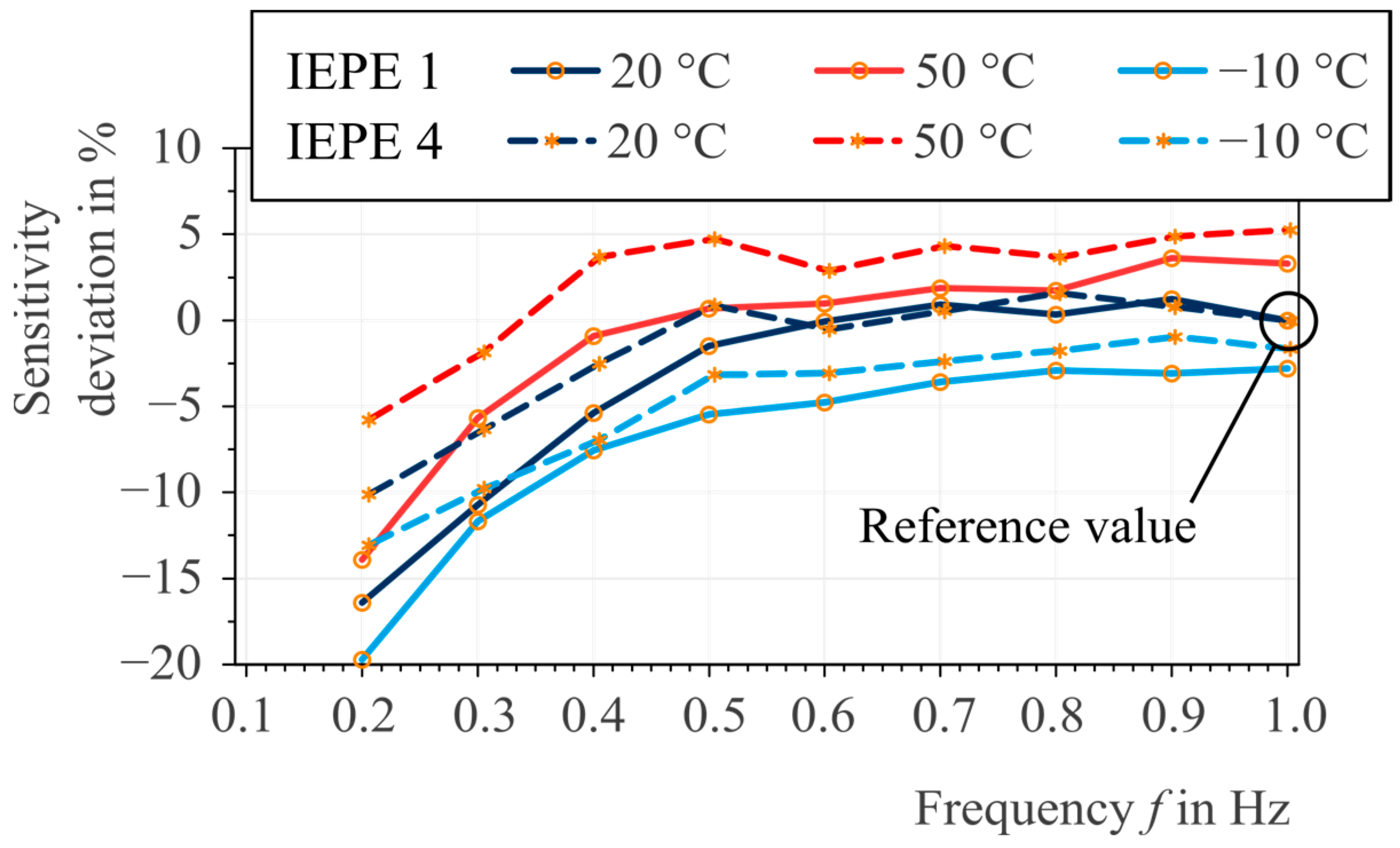
- Due to the temperature dependency of the piezoelectric constants, the transmission behavior of IEPE sensors in the low-frequency range is temperature-dependent. The sensor sensitivity increases with rising ambient temperatures. Within the temperature range of −10 °C to +50 °C, there was a deviation in sensitivity of up to 10%, independent of the tested frequency range of 0.2 Hz to 1.0 Hz.
- Based on the test results—although there was some uncertainty in the test procedure—the transmission behavior of IEPE sensors in the low-frequency range can be interpreted as almost independent of the air humidity.
- In the case study, it was demonstrated that, for a precise measurement-based evaluation of structural behavior, both the sensor response and the structural response should be assessed separately. For this, parameters like signal energy can be suitable for evaluation features.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Botz, M.; Oberlaender, S.; Raith, M.; Grosse, C. Monitoring of Wind Turbine Structures with Concrete-steel Hybrid-tower Design. In Proceedings of the 8th European Workshop on Structural Health Monitoring (EWSHM 2016), Bilbao, Spain, 5–8 July 2016; pp. 1–11. [Google Scholar]
- Orbán, Z.; Gutermann, M. Assessment of masonry arch railway bridges using non-destructive in-situ testing methods. Eng. Struct. 2009, 31, 2287–2298. [Google Scholar] [CrossRef]
- Proske, D.; Sykora, M.; Gutermann, M. Verringerung der Versagenswahrscheinlichkeit von Brücken durch experimentelle Traglastversuche. Bautechnik 2021, 98, 80–92. [Google Scholar] [CrossRef]
- Hafiz, A.; Schumacher, T. Monitoring of Stresses in Concrete Using Ultrasonic Coda Wave Comparison Technique. J. Nondestruct. Eval. 2018, 37, 73. [Google Scholar] [CrossRef]
- Rizzo, P.; Enshaeian, A. Challenges in Bridge Health Monitoring: A Review. Sensors 2021, 21, 4336. [Google Scholar] [CrossRef]
- Giagopoulos, D.; Arailopoulos, A.; Dertimanis, V.; Papadimitriou, C.; Chatzi, E.; Grompanopoulos, K. Structural health monitoring and fatigue damage estimation using vibration measurements and finite element model updating. Struct. Health Monit. 2019, 18, 1189–1206. [Google Scholar] [CrossRef]
- Omidalizarandi, M.; Herrmann, R.; Kargoll, B.; Marx, S.; Paffenholz, J.-A.; Neumann, I. A validated robust and automatic procedure for vibration analysis of bridge structures using MEMS accelerometers. J. Appl. Geod. 2020, 14, 327–354. [Google Scholar] [CrossRef]
- Shariati, A.; Schumacher, T. Eulerian-based virtual visual sensors to measure dynamic displacements of structures. Struct. Control Health Monit. 2017, 24, e1977. [Google Scholar] [CrossRef]
- Fremmelev, M.A.; Ladpli, P.; Orlowitz, E.; Dervilis, N.; McGugan, M.; Branner, K. A full-scale wind turbine blade monitoring campaign: Detection of damage initiation and progression using medium-frequency active vibrations. Struct. Health Monit. 2023, 22, 4171–4193. [Google Scholar] [CrossRef]
- Chen, S.; Cerda, F.; Rizzo, P.; Bielak, J.; Garrett, J.H.; Kovacevic, J. Semi-Supervised Multiresolution Classification Using Adaptive Graph Filtering with Application to Indirect Bridge Structural Health Monitoring. IEEE Trans. Signal Process. 2014, 62, 2879–2893. [Google Scholar] [CrossRef]
- Wenzel, H. Health Monitoring of Bridges, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2009; ISBN 9780470031735. [Google Scholar]
- Rolfes, R.; Zerbst, S.; Haake, G.; Preetz, J.; Lynch, J.P. Integral SHM-System for Offshore Wind Turbines Using Smart Wireless Sensors. In Proceedings of the 6th International Workshop on Structural Health Monitoring, Hong Kong, China, 9 December 2013; DEStech Publications Inc.: Stanford, CA, USA, 2007; pp. 11–13. [Google Scholar]
- Park, G.; You, D.; Oh, K.-Y.; Nam, W. Natural Frequency Degradation Prediction for Offshore Wind Turbine Structures. Machines 2022, 10, 356. [Google Scholar] [CrossRef]
- Fraden, J. Handbook of Modern Sensors: Physics, Designs, and Applications, 5th ed.; Springer: New York, NY, USA, 2016; ISBN 9783319193038. [Google Scholar]
- Aabid, A.; Parveez, B.; Raheman, A.; Ibrahim, Y.E.; Anjum, A.; Hrairi, M.; Parveen, N.; Zayan, J.M. A Review of Piezoelectric Material-Based Structural Control and Health Monitoring Techniques for Engineering Structures: Challenges and Opportunities. Actuators 2021, 10, 101. [Google Scholar] [CrossRef]
- Satija, J.; Singh, S.; Zope, A.; Li, S.-S. An Aluminum Nitride-Based Dual-Axis MEMS In-Plane Differential Resonant Accelerometer. IEEE Sens. J. 2023, 23, 16736–16745. [Google Scholar] [CrossRef]
- Anslow, R.; O’Sullivan, D. Choosing the Best Vibration Sensor for Wind Turbine Condition Monitoring. Analog. Dialogue 2020, 54, 1–6. [Google Scholar]
- Zanelli, F.; Debattisti, N.; Mauri, M.; Argentino, A.; Belloli, M. Development and Field Validation of Wireless Sensors for Railway Bridge Modal Identification. Appl. Sci. 2023, 13, 3620. [Google Scholar] [CrossRef]
- Bedon, C.; Bergamo, E.; Izzi, M.; Noè, S. Prototyping and Validation of MEMS Accelerometers for Structural Health Monitoring—The Case Study of the Pietratagliata Cable-Stayed Bridge. J. Sens. Actuator Netw. 2018, 7, 30. [Google Scholar] [CrossRef]
- DIN ISO 16063-21:2016-08; Verfahren zur Kalibrierung von Schwingungs- und Stoßaufnehmern—Teil 21: Schwingungskalibrierung durch Vergleich mit einem Referenzaufnehmer (ISO 16063-21:2003 + Cor. 1:2009 + Amd.1:2016). Beuth Verlag GmbH: Berlin, Germany, 2016.
- DIN EN ISO/IEC 17025:2018-03; Allgemeine Anforderungen an die Kompetenz von Prüf- und Kalibrierlaboratorien (ISO/IEC 17025:2017); Deutsche und Englische Fassung EN ISO/IEC 17025:2017. Beuth Verlag GmbH: Berlin, Germany, 2018.
- ISO 16063-21:2003-08; Methods for the Calibration of Vibration and Shock Transducers—Part 21: Vibration calibration by comparison with a reference transducer. Beuth Verlag GmbH: Berlin, Germany, 2013.
- Olivares, A.; Olivares, G.; Gorriz, J.M.; Ramirez, J. High-efficiency low-cost accelerometer-aided gyroscope calibration. In Proceedings of the 2009 International Conference on Test and Measurement (ICTM 2009), Hong Kong, China, 5–6 December 2009; IEEE: New York, NY, USA, 2009; pp. 354–360, ISBN 978-1-4244-4699-5. [Google Scholar]
- Jonscher, C.; Hofmeister, B.; Grießmann, T.; Rolfes, R. Very low frequency IEPE accelerometer calibration and application to a wind energy structure. Wind. Energ. Sci. 2022, 7, 1053–1067. [Google Scholar] [CrossRef]
- Bartels, J.-H.; Gebauer, D.; Marx, S. Einflüsse auf die Messunsicherheit von SHM-Systemen und deren Kompensation am Beispiel von Laser-Distanzmessungen. Bautechnik 2023, 100, 67–74. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective, 1st ed.; John Wiley & Sons Incorporated: New York, NY, USA, 2012; ISBN 9781118443217. [Google Scholar]
- Peeters, B.; de Roeck, G. One-year monitoring of the Z24-Bridge: Environmental effects versus damage events. Earthq. Eng. Struct. Dyn. 2001, 30, 149–171. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. An Introduction to Structural Health Monitoring. Philos. Trans. R. Soc. A 2007, 365, 303–315. [Google Scholar] [CrossRef]
- Viefhues, E.; Döhler, M.; Simon, P.; Herrmann, R.; Hille, F.; Mevel, L. Stochastic subspace-based damage detection of a temperature affected beam structure. In Proceedings of the 10th International Conference on Structural Health Monitoring of Intelligent Infrastructure, Porto, Portugal, 30 June–2 July 2021; pp. 1–6. [Google Scholar]
- Bartels, J.-H.; Kitahara, M.; Marx, S.; Beer, M. Environmental influence on structural health monitoring systems. In Life-Cycle of Structures and Infrastructure Systems, Proceedings of the Eighth International Symposium of Life-Cycle Civil Engineering (IALCCE 2023), Milan, Italy, 2–6 July 2023; Biondini, F., Frangopol, D.M., Eds.; CRC Press: Boca Raton, FL, USA, 2023; pp. 662–669. ISBN 978-1-003-32302-0. [Google Scholar]
- Stein, G.J. Some recent developments in acceleration sensors. Meas. Sci. Rev. 2001, 1, 183–186. [Google Scholar]
- Chalouhi, E.K.; Gonzalez, I.; Gentile, C.; Karoumi, R. Vibration-Based SHM of Railway Bridges Using Machine Learning: The Influence of Temperature on the Health Prediction. In Proceedings of the International Conference on Experimental Vibration Analysis for Civil Engineering Structures, Cham, Switzerland, 13 October 2018; Springer: Cham, Switzerland; pp. 200–211. [Google Scholar]
- DIN 1319-1:1995-01; Grundlagen der Meßtechnik—Teil 1: Grundbegriffe. Beuth Verlag GmbH: Berlin, Germany, 1995.
- Tuloup, C.; Harizi, W.; Aboura, Z.; Meyer, Y.; Khellil, K.; Lachat, R. On the use of in-situ piezoelectric sensors for the manufacturing and structural health monitoring of polymer-matrix composites: A literature review. Compos. Struct. 2019, 215, 127–149. [Google Scholar] [CrossRef]
- Nemirovsky, Y.; Nemirovsky, A.; Muralt, P.; Setter, N. Design of novel thin-film piezoelectric accelerometer. Sens. Actuators A Phys. 1996, 56, 239–249. [Google Scholar] [CrossRef]
- de Reus, R.; Gulløv, J.O.; Scheeper, P.R. Fabrication and characterization of a piezoelectric accelerometer. J. Micromech. Microeng. 1999, 9, 123–126. [Google Scholar] [CrossRef]
- Tichý, J.; Gautschi, G.H. Piezoelektrische Messtechnik: Physikalische Grundlagen, Kraft-, Druck-u. Beschleunigungsaufnehmer, Verstärker; Springer: Berlin/Heidelberg, Germany, 1980; ISBN 3540094482. [Google Scholar]
- Bigelow, H.; Pak, D.; Herrmann, R.; Schneider, S.; Marx, S.; Petraschek, T.; Feldmann, M.; Hoffmeister, B. Dynamische Messungen an einer Eisenbahnbrücke als Stahlbetonverbundrahmen. Stahlbau 2017, 86, 778–788. [Google Scholar] [CrossRef]
- Schneider, R.; Simon, P.; Hille, F.; Herrmann, R.; Baeßler, M. Vibration-based system identification of a large steel box girder bridge. In Eurodyn 2023; Metrikine, A., Ed.; TU Delft: Delft, The Netherlands, 2023. [Google Scholar]
- Oberst, U.; Scheicher, M.; Scheicher, I. Linear Time-Invariant Systems, Behaviors and Modules, 1st ed.; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; ISBN 978-3-030-43935-4. [Google Scholar]
- Weber, M. Piezoelektrische Beschleunigungsaufnehmer: Theorie und Anwendung. Available online: https://www.mmf.de/manual/aufnehmerman.pdf (accessed on 10 May 2023).
- Xie, L.; Wu, T.; Yi, Z.; Fu, X.; Zang, W.; Lu, W. Passive Accelerometer Using Unstressed Patch Antenna Interrogated by FMCW Radar. IEEE Sens. J. 2023, 23, 16672–16682. [Google Scholar] [CrossRef]
- Hidalgo Fort, E.; Blanco-Carmona, P.; Garcia-Oya, J.R.; Muñoz-Chavero, F.; Gonzalez-Carvajal, R.; Serrano-Chacon, A.R.; Mascort-Albea, E.J. Wireless and Low-Power System for Synchronous and Real-Time Structural-Damage Assessment. IEEE Sens. J. 2023, 23, 13648–13658. [Google Scholar] [CrossRef]
- Althen Sensors & Controls 786LF Series Extremely Low-Frequency Accelerometer—Datasheet. Available online: https://www.althensensors.com/sensors/vibration-sensors/low-frequency-seismic-vibration-sensors/786-lf-low-frequency-seismic-vibration-sensors/ (accessed on 21 January 2024).
- Dorf, R.C. The Electrical Engineering Handbook—Six Volume Set; CRC Press: Boca Raton, FL, USA, 2018; ISBN 9781420049756. [Google Scholar]
- DIN EN 50324-2 VDE 0336-2:2002-12; Piezoelektrische Eigenschaften von Keramischen Werkstoffen und Komponenten. VDE Verlag: Berlin, Germany.
- Andreeff, A.; Fréederieksz, V.; Kararnosky, I. Die Abhängigkeit der piezoelektrischen Konstante bei Quarz von der Temperatur. Z. Phys. 1929, 54, 477–483. [Google Scholar] [CrossRef]
- Jones, D.R.H.; Ashby, M.F. Engineering Materials 1: An Introduction to Properties, Applications and Design, 5th ed.; Butterworth-Heinemann: Oxford, UK, 2019; ISBN 9780081020524. [Google Scholar]
- Große, C. Quantitative Zerstörungsfreie Prüfung von Baustoffen Mittels Schallemissionsanalyse und Ultraschall. Ph.D. Thesis, Universität Stuttgart, Stuttgart, Germany, 1996. [Google Scholar]
- Xu, R.; Hicke, K.; Chruscicki, S.; Marx, S. Akustisches SpRK-Monitoring mit SEA und verteilten faseroptischen Sensoren. In 12. Symposium Experimentelle Untersuchungen von Baukonstruktionen; TU Dresden: Dresden, Germany, 2023; pp. 136–147. [Google Scholar]
- Oppenheim, A.V.; Willsky, A.S.; Nawab, S.H. Signals and Systems, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1997; ISBN 0138147574. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Sensitivity of Q.bloxx XL A111 |
|---|---|
| 0.1 Hz | 70.7% (−3 dB) |
| 0.2 Hz | 90.0% (−1 dB) |
| 0.3 Hz | 100.0% (0 dB) |
| TUD | BAM | |
|---|---|---|
| External conditions | Varying environmental conditions | Constant environmental conditions |
| Calibration station | Linear unit | Vibration-isolated calibration table with horizontal low-frequency shaker |
| Input signal | Linear velocity and constant acceleration profile | Harmonic oscillation |
| Reference transducer | MEMS 1 | MEMS 2 |
| f in Hz | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | |
|---|---|---|---|---|---|---|---|---|---|---|
| BAM | a in m/s2 | 0.103 | 0.232 | 0.412 | 0.643 | 0.926 | 1.260 | 1.646 | 2.083 | 2.571 |
| TUD | a in m/s2 | 0.102 | 0.230 | 0.410 | 0.640 | 0.922 | 1.254 | 1.638 | 2.074 | 2.560 |
| Manufacturer and Model | Frequency Range | Sensitivity | Noise Density | |
|---|---|---|---|---|
| MEMS 1 | PCB Piezotronics Model 3713B112G | 0.00–250 Hz | 1000 mV/g ± 5% | |
| MEMS 2 | Silicon Design Inc. Model 2240-005 | 0.00–400 Hz | 800 mV/g ± 5% | |
| IEPE | Wilcoxon Model 786LF-500 | 0.10–13,000 Hz | 500 mV/g ± 3 dB |
| IEPE 1 | IEPE 4 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| T in °C | 20 | −10 | 50 | 20 | 20 | 20 | −10 | 50 | 20 | 20 |
| Δm in % | 0 | 0 | 0 | +3 | +6 | 0 | 0 | 0 | +3 | +6 |
| f0,1 in Hz | 8.79 | 9.74 | 8.39 | 8.63 | 7.20 | 8.79 | 9.74 | 8.39 | 8.63 | 7.20 |
| Δf0,1 in % | - | +11 | −5 | −2 | −18 | - | +11 | −5 | −2 | −18 |
| Erel in mV2/mm2 | 8113 | 3975 | 10,609 | 7802 | 7528 | 2838 | 1305 | 4603 | 2703 | 2544 |
| ΔErel in % | - | −51 | +31 | −4 | −7 | - | −54 | +62 | −5 | −10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bartels, J.-H.; Xu, R.; Kang, C.; Herrmann, R.; Marx, S. Experimental Investigation on the Transfer Behavior and Environmental Influences of Low-Noise Integrated Electronic Piezoelectric Acceleration Sensors. Metrology 2024, 4, 46-65. https://doi.org/10.3390/metrology4010004
Bartels J-H, Xu R, Kang C, Herrmann R, Marx S. Experimental Investigation on the Transfer Behavior and Environmental Influences of Low-Noise Integrated Electronic Piezoelectric Acceleration Sensors. Metrology. 2024; 4(1):46-65. https://doi.org/10.3390/metrology4010004
Chicago/Turabian StyleBartels, Jan-Hauke, Ronghua Xu, Chongjie Kang, Ralf Herrmann, and Steffen Marx. 2024. "Experimental Investigation on the Transfer Behavior and Environmental Influences of Low-Noise Integrated Electronic Piezoelectric Acceleration Sensors" Metrology 4, no. 1: 46-65. https://doi.org/10.3390/metrology4010004