
Elastic Solutions to 2D Plane Strain Problems: Nonlinear Contact and Settlement Analysis for Shallow Foundations

Abstract
:1. Introduction
2. Methodology
2.1. Plane Strain as a Limit of the Fully Three-Dimensional Half-Space Problem
2.1.1. Calculation Approach
2.1.2. A Note on the Displacement Field
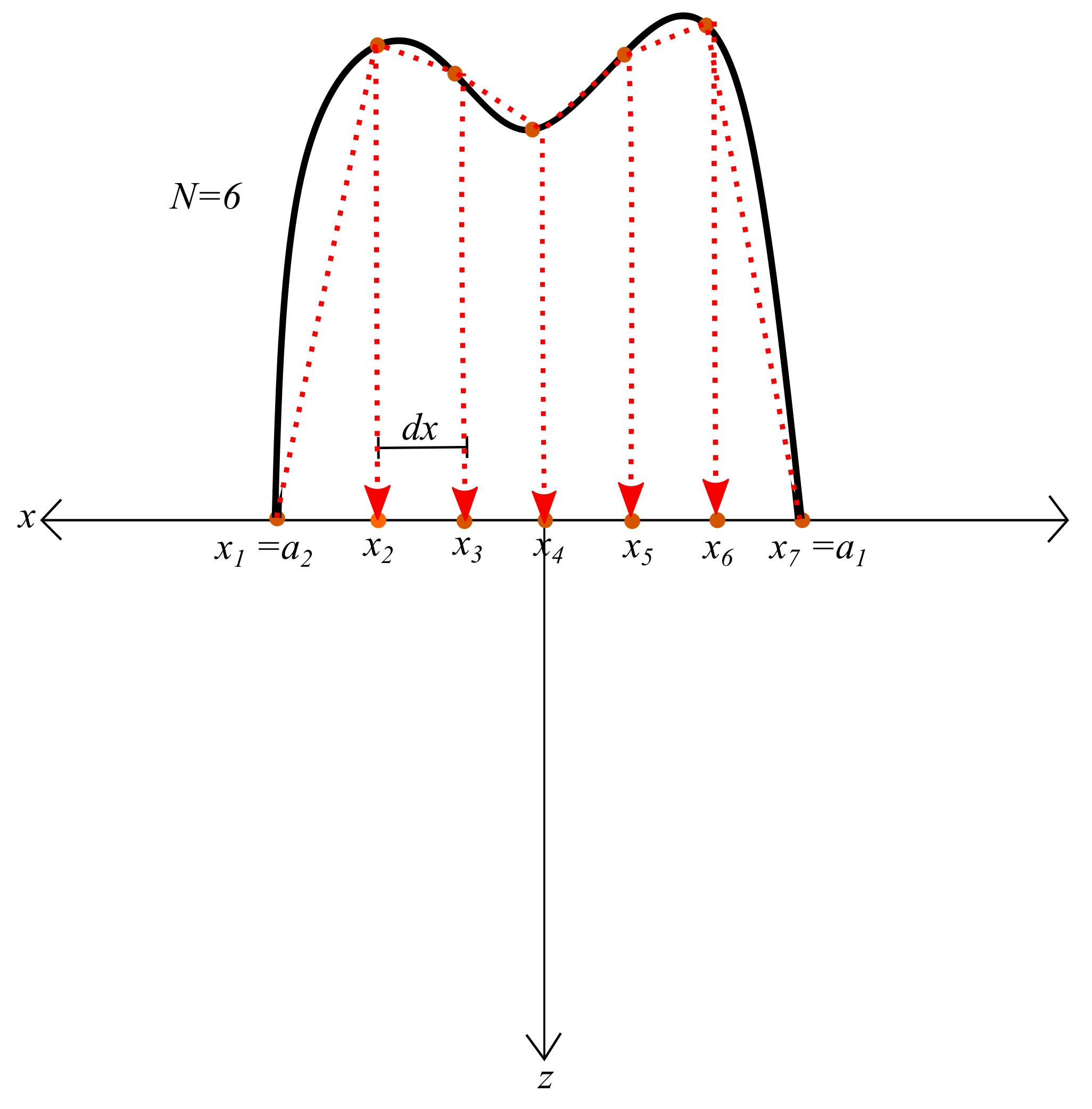
2.2. Approximate Solutions to Higher-Order Problems Via Superposition
A Simple Algorithm
3. Results
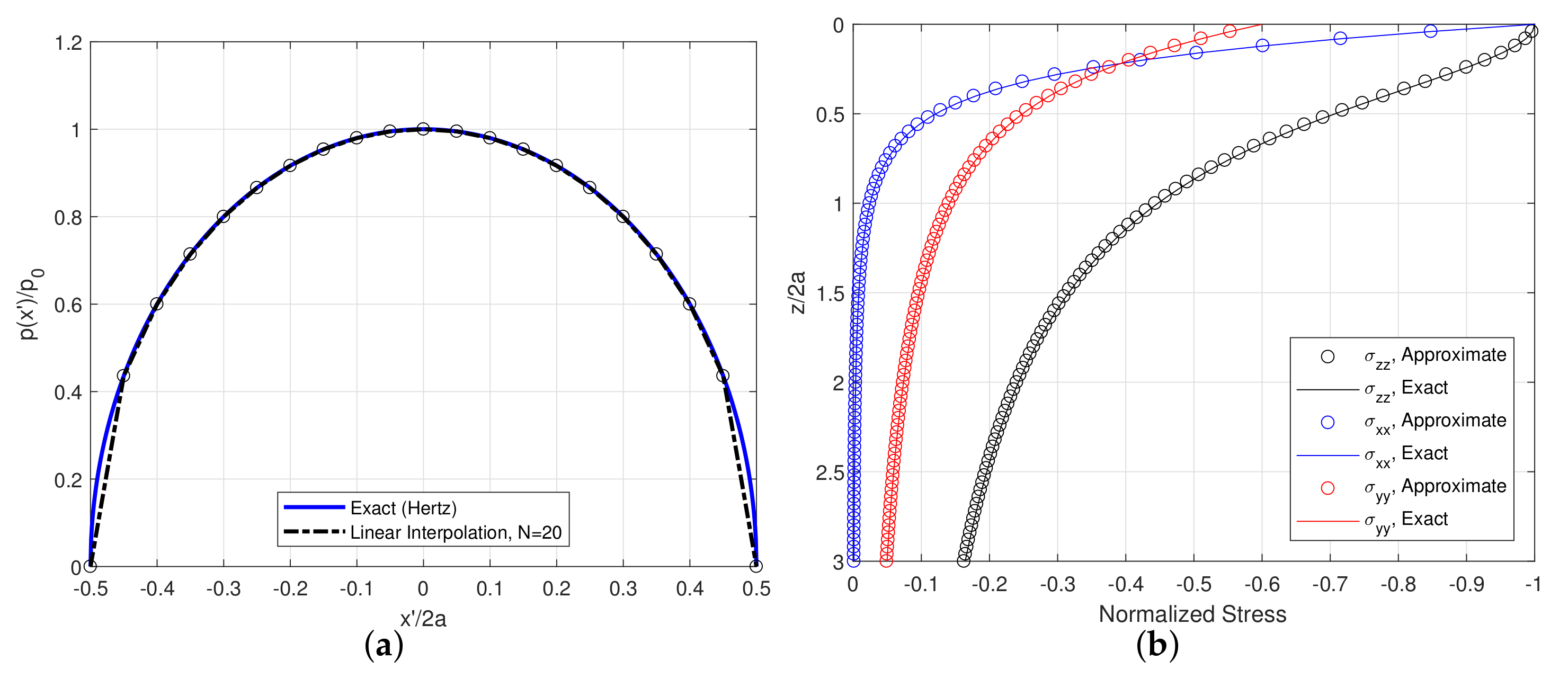
3.1. Verification Problem: Elastic Contact of Parallel Cylinders
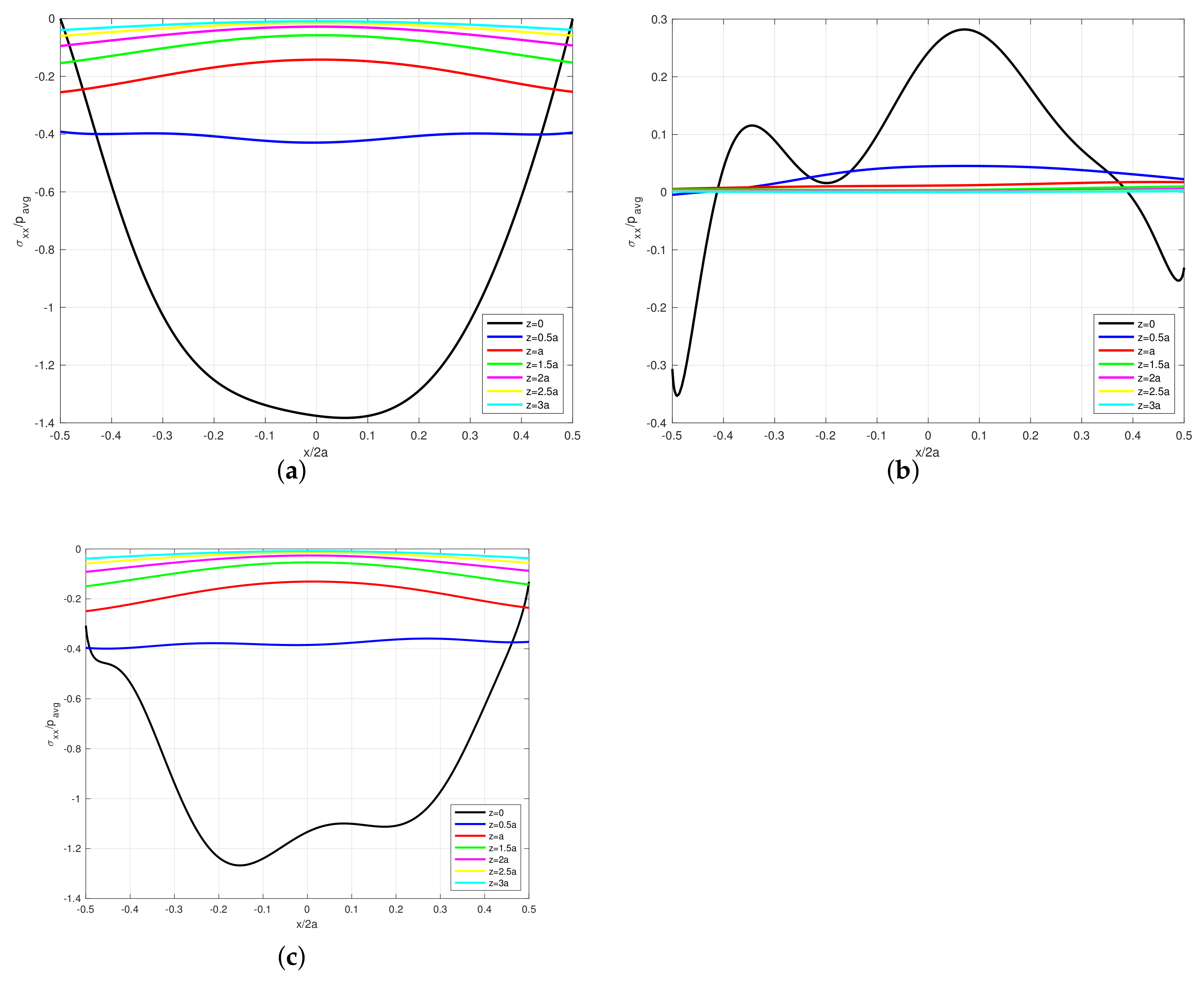
3.2. Applications to Shallow Foundation Analysis
3.2.1. Example 1: Foundation Contact as an Elastoplastic Rigid Punch Problem
3.2.2. Example 2: Empirically Measured Contact Traction Fields from Real Granular Materials
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AEM | Analytic Element Method |
| BEM | Boundary Element Method |
Appendix A. Plane Strain Potential Functions
Appendix A.1. Constant Traction (m = 0)
Appendix A.2. Linear Traction (m = 1)
References
- Flamant, A. Sur la repartition des pressions dans un solide rectangulaire charge transversalement. Compt. Rendus 1892, 114, 1465. [Google Scholar]
- Johnson, K. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Hemsley, J. Elastic Analysis of Raft Foundations; Thomas Telford Publishing: London, UK, 1998. [Google Scholar] [CrossRef]
- Muskhelishvili, N. Some Basic Problems of the Mathematical Theory of Elasticity; P. Noordhoff: Groningen, The Netherlands, 1963. [Google Scholar]
- England, A. Complex Variable Methods in Elasticity; Dover Publications: Mineola, NY, USA, 1971. [Google Scholar]
- Boussinesq, J. Application Des Potentials a l’etude de l’equilibre et du Mouvement des Solides Elastiques; Gauthier-Villars: Paris, France, 1885. [Google Scholar]
- Boussinesq, J. Essai theorique sur l’equilibre d’elasticite des massifs pulverulents compare a celui de massifs solides et sur la poussee des terres sans cohesion. In Mémoires Couronnés et Mémoires des Savants Étrangers; Forgotten Books: London, UK, 1876. [Google Scholar]
- Love, A.E.H. The stress produced in a semi-infinite solid by pressure on part of the boundary. Philos. Trans. R. Soc. Lond. Ser. Contain. Pap. Math. Phys. Character 1929, 228, 377–420. [Google Scholar]
- Newmark, N.M. Simplified Computation of Vertical Pressures in Elastic Foundations; Report, Engineering Experiment Station; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 1935. [Google Scholar]
- Schmertmann, J. Static cone to compute static settlement over sand. J. Mech. Found. Div. ASCE 1970, 96, 1011–1043. [Google Scholar] [CrossRef]
- Schmertmann, J.; Hartman, J.; Brown, P. Improved strain influence factor diagrams. J. Geotech. Geoenviron. Eng. 1978, 104, 1131–1135. [Google Scholar] [CrossRef]
- Shahriar, M.A.; Sivakugan, N.D.B. Strain influence factors for footings on an elastic medium. In Proceedings of the ANZ 2012 Conference Proceedings, Melbourne, Australia, 9–13 August 2012. [Google Scholar]
- Pantelidis, L. Elastic Settlement Analysis for Various Footing Cases Based on Strain Influence Areas. Geotech. Geol. Eng. 2020, 38, 4201–4225. [Google Scholar] [CrossRef]
- Pantelidis, L. Strain Influence Factor Charts for Settlement Evaluation of Spread Foundations based on the Stress–Strain Method. Appl. Sci. 2020, 10, 3822. [Google Scholar] [CrossRef]
- Pantelidis, L.; Gravanis, E. Elastic Settlement Analysis of Rigid Rectangular Footings on Sands and Clays. Geosciences 2020, 10, 491. [Google Scholar] [CrossRef]
- Taylor, A.G.; Chung, J.H. Application of low-order potential solutions to higher order vertical traction boundary problems in an elastic half-space. R. Soc. Open Sci. 2018, 5, 180203. [Google Scholar] [CrossRef]
- Taylor, A.G.; Chung, J.H. Analysis of tangential contact boundary value problems using potential functions. R. Soc. Open Sci. 2019, 6, 182106. [Google Scholar] [CrossRef]
- Taylor, A.G.; Chung, J.H. Explanation and Application of the Evolving Contact Traction Fields in Shallow Foundation Systems. Geotechnics 2022, 2, 4. [Google Scholar] [CrossRef]
- Marmo, F.; Rosati, L. A general approach to the solution of Boussinesq’s problem for polynomial pressures acting over polygonal domains. J. Elast. 2015, 122, 75–112. [Google Scholar] [CrossRef]
- Marmo, F.; Sessa, S.; Rosati, L. Analytical solutions of the Cerruti problem under linearly distributed horizontal loads over polygonal domains. J. Elast. 2016, 124, 27–56. [Google Scholar] [CrossRef]
- Love, A.E.H. A Treatise on the Mathematical Theory of Elasticity; Dover Publications: New York, NY, USA, 1944. [Google Scholar]
- Cerruti, V. Ricerche intorno all’equilibrio de’corpi elastici isotropi. R. Accad. Dei Lincei 1882, 13, 81–123. [Google Scholar]
- Abdeyev, B.; Brim, T.; Muslimanova, G. Contradictions in the plane contact problem of the theory of elasticity on the compression of cylinders in contact with parallel generators. PNRPU Mech. Bulletic 2021, 6–11. [Google Scholar] [CrossRef]
- Yano, M.; Penn, J.; Konidaris, G.; Patera, A. Maths, Numerics, and Programming (for Mechanical Engineers); MIT OpenCourseWare: Cambridge, MA, USA, 2013. [Google Scholar]
- Strack, O. The Analytic Element Method for regional groundwater modelling. In Proceedings of the Conference of the National Water Well Association Solving Groundwater Problems with Models, Dublin, OH, USA, 10–12 February 1987. [Google Scholar]
- Strack, O. Groundwater Mechanics; Prentice Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Hertz, H. On the Contact of Rigid Elastic Solids and on Hardness; Chapter 6: Assorted papers by H. Hertz; MacMillan: New York, NY, USA, 1882. [Google Scholar]
- Kunert, V.K. Spannungsverteilung im Halbraum bei elliptischer Flächenpressungsverteilung über einer rechteckigen Druckfläche. Forsch. Auf Dem Geb. Des Ingenieurwesens A 1961, 27, 165–174. [Google Scholar] [CrossRef]
- Williams, J.; Dwyer-Joyce, R. Modern Tribology Handbook, Chapter 3: Contact Between Solid Surfaces; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Davis, R.O.; Selvadurai, A.P.S. Elasticity and Geomechanics; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Abdullah, W. New elastoplastic method for calculating the contact pressure distribution under rigid foundations. Jordan J. Civ. Eng. 2008, 2, 71–89. [Google Scholar]
- Bauer, G.; Shields, D.; Scott, J.; Nwabuokei, S. Normal and shear stress measurements on a strip footing. Can. Geotech. J. 1979, 16, 177–189. [Google Scholar] [CrossRef]
- Fabrikant, V. Flat punch of arbitrary shape on an elastic half-space. Int. J. Engng. Sci. 1986, 24, 1731–1740. [Google Scholar] [CrossRef]
- Harding, J.; Sneddon, I. The elastic stresses produced by the indentation of the plane surface of a semi-infinite elastic solid by a rigid punch. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1945; Volume 41, pp. 16–26. [Google Scholar]
- Sneddon, I. Boussinesq’s problem of a flat-ended cylinder. Math. Proc. Camb. Phil Soc. 1946, 42, 29–39. [Google Scholar] [CrossRef]
- Schultze, E. Distribution of stress beneath a rigid foundation. In Proceedings of the 5th International Conference on Soil Mechanics and Foundation Engineering, Paris, Frace, 17–22 July 1961; pp. 807–813. [Google Scholar]
- Terzaghi, K. Theoretical Soil Mechanics; John Wiley and Sons, Inc: New York, NY, USA, 1943. [Google Scholar]
- Balakrishna, C.; Murthy, B.; Nagaraj, T. Stress distribution beneath rigid circular foundations on sands. Int. J. Numer. Anal. Methods Geomech. 1992, 16, 65–72. [Google Scholar] [CrossRef]
- Terzaghi, K.; Ralph, B.P.; Mesri, G. Soil Mechanics in Engineering Practice; Wiley: London, UK, 1996. [Google Scholar]
- Pantelidis, L. A Critical Review of Schmertmann’s Strain Influence Factor Method for Immediate Settlement Analysis. Geotech. Geol. Eng. 2020, 38, 1–18. [Google Scholar] [CrossRef]
- Ho, M.; Lopes, R. Contact pressure of a rigid circular foundation. J. Soil Mech. Found. Div. Proc. Am. Soc. Civ. Eng. 1969, 93, 791–802. [Google Scholar] [CrossRef]
- Lazebnik, G.E.; Smirnov, A.A. Measurement of stresses under a rigid foundation block in the field. Soil Mech. Found. Eng. 1964, 1, 71–78. [Google Scholar] [CrossRef]
- Muhs, H.; Bub, H. On the measurement of friction in the base of flat footings founded in sand and first test results gained by a new gauge developed for the combined measurement of normal and tangential stresses. In Proceedings of the 6th International Conference of Soil mechanics and Foundation Engineering, Montreal, QC, Canada, 8–15 September 1965; Cambridge University Press: Cambridge, UK, 1965. [Google Scholar]
- Murzenko, Y. Experimental results on the distribution of normal contact pressure on the base of a rigid foundation resting on sand. Soil Mech. Found. Eng. 1965, 2, 69–73. [Google Scholar] [CrossRef]
- von Mises, R. On Saint Venant’s principle. Bull. AMS 1945, 51, 555–562. [Google Scholar] [CrossRef]
- Briaud, J.L.; Gibbens, R. Behavior of Five Large Spread Footings in Sand. J. Geotech. Geoenvironmental Eng. 1999, 125, 787–796. [Google Scholar] [CrossRef]
- Lambe, T.; Whitman, R. Soil Mechanics; John Wiley & Sons: New York, NY, USA, 2008. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taylor, A.G.; Chung, J.H. Elastic Solutions to 2D Plane Strain Problems: Nonlinear Contact and Settlement Analysis for Shallow Foundations. Geotechnics 2022, 2, 649-670. https://doi.org/10.3390/geotechnics2030032
Taylor AG, Chung JH. Elastic Solutions to 2D Plane Strain Problems: Nonlinear Contact and Settlement Analysis for Shallow Foundations. Geotechnics. 2022; 2(3):649-670. https://doi.org/10.3390/geotechnics2030032
Chicago/Turabian StyleTaylor, Adam G., and Jae H. Chung. 2022. "Elastic Solutions to 2D Plane Strain Problems: Nonlinear Contact and Settlement Analysis for Shallow Foundations" Geotechnics 2, no. 3: 649-670. https://doi.org/10.3390/geotechnics2030032