
Self-Assembly of Y-Shaped Polymer Brushes with Low Poly-Dispersity †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Dissipative Particle Dynamics
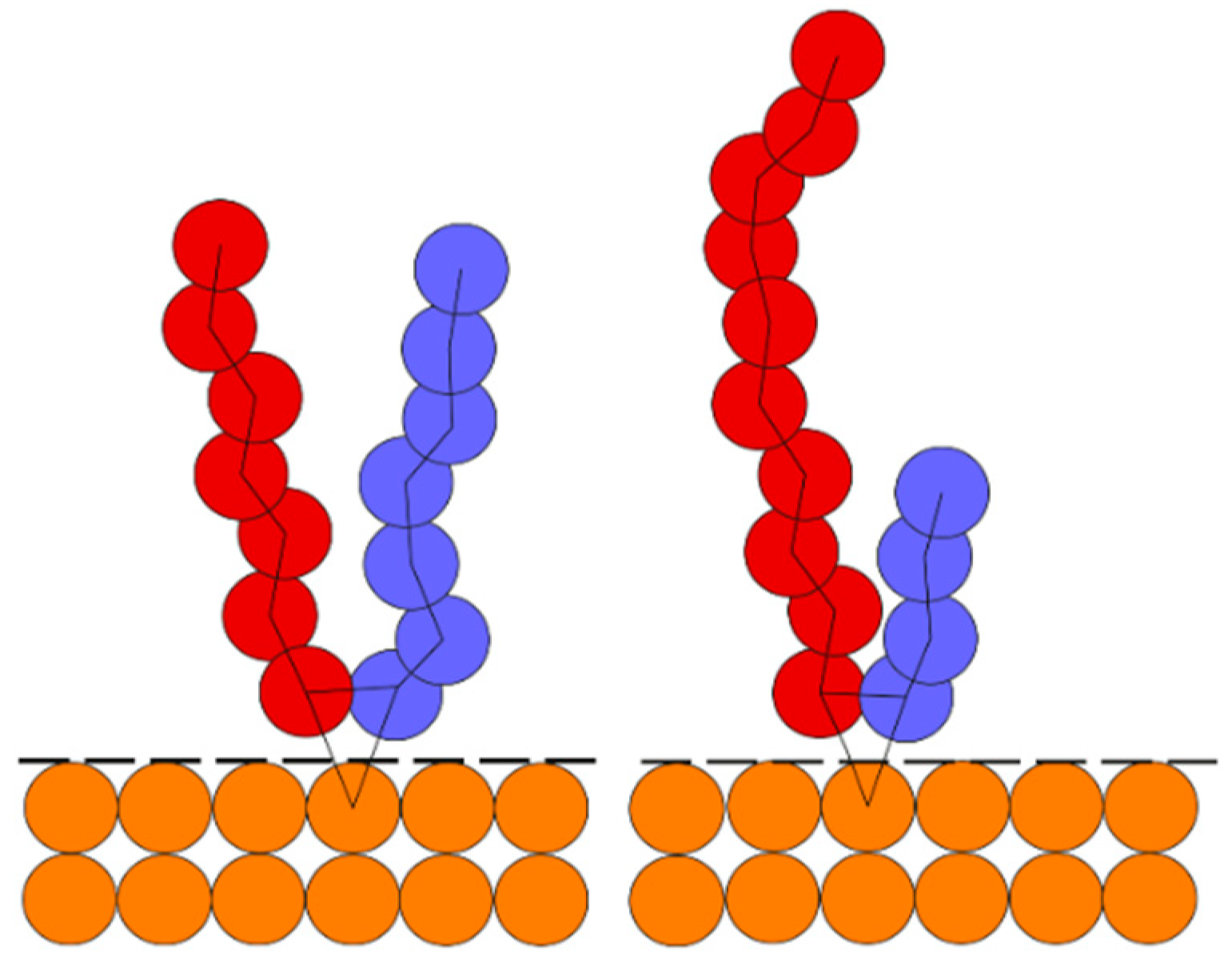
2.2. Y-Shaped Mixed Brush Grafted onto a Flat Surface
2.3. Polydisperse Y-Shaped Mixed Brushes
3. Results
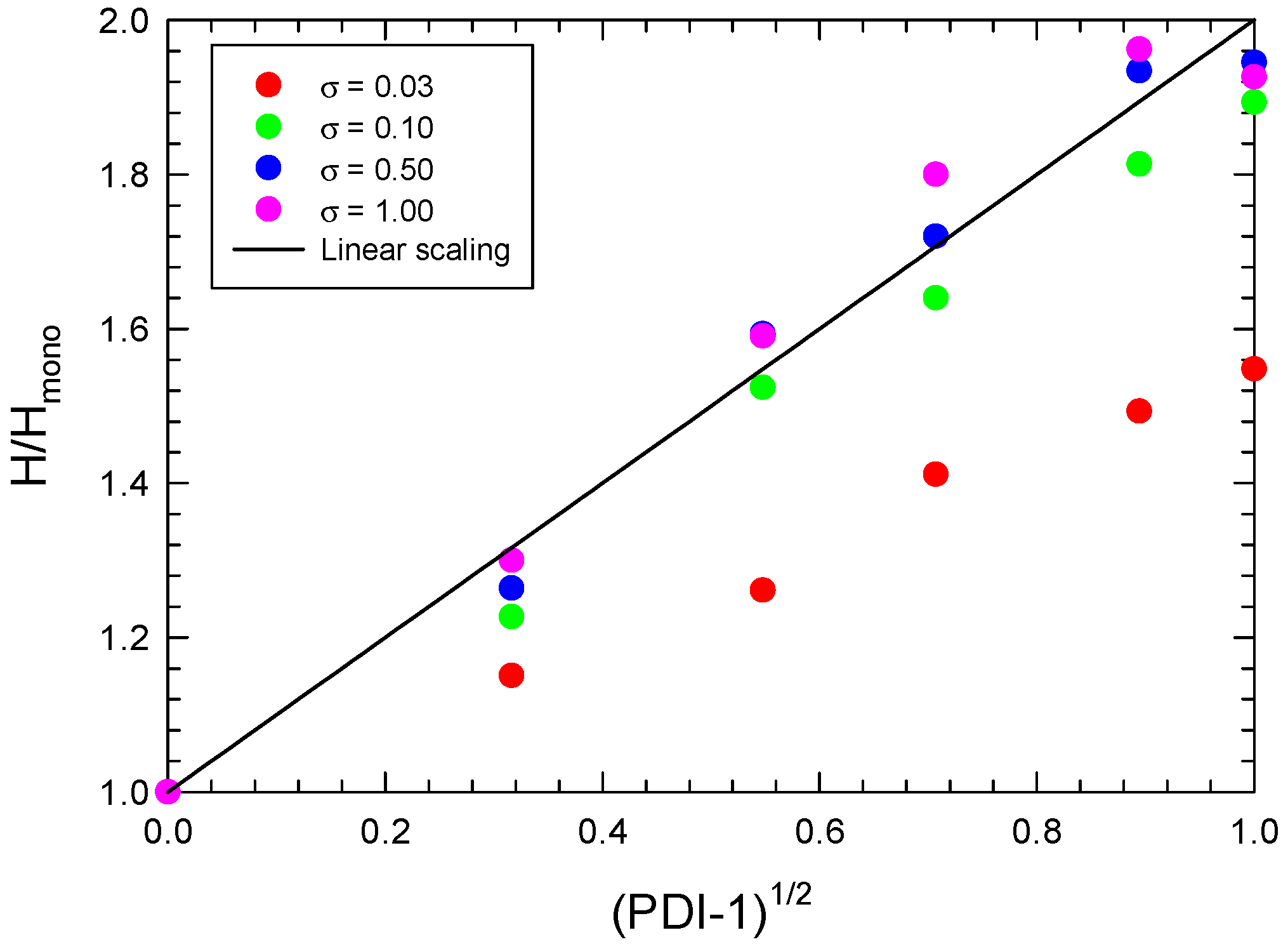
3.1. Monodisperse Y-Shaped Brush Scaling
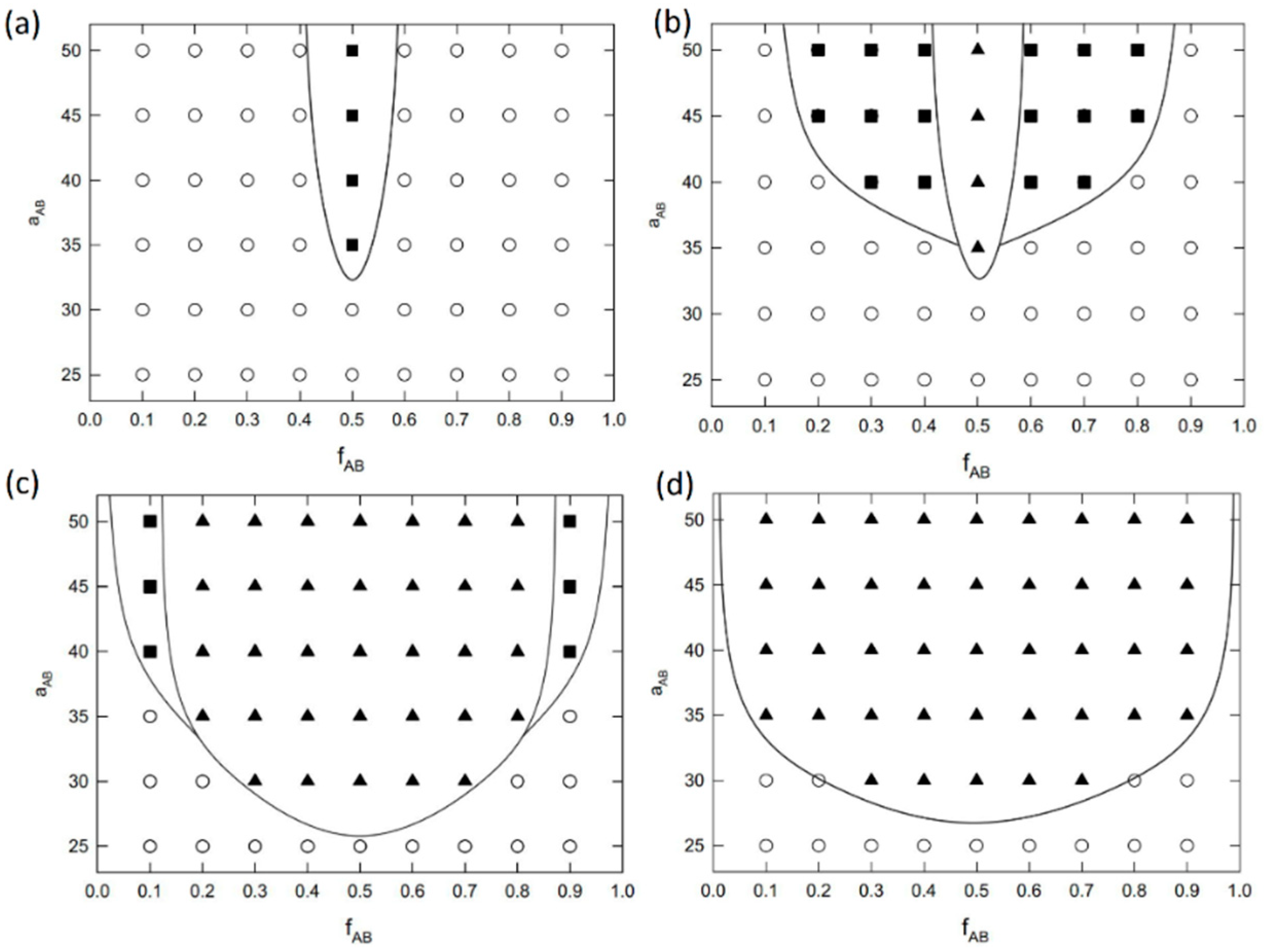
3.2. Phase Behvaior of a Monodisperse Y-Shaped Brush
3.3. Polydisperse Y-Shaped Brush Scaling
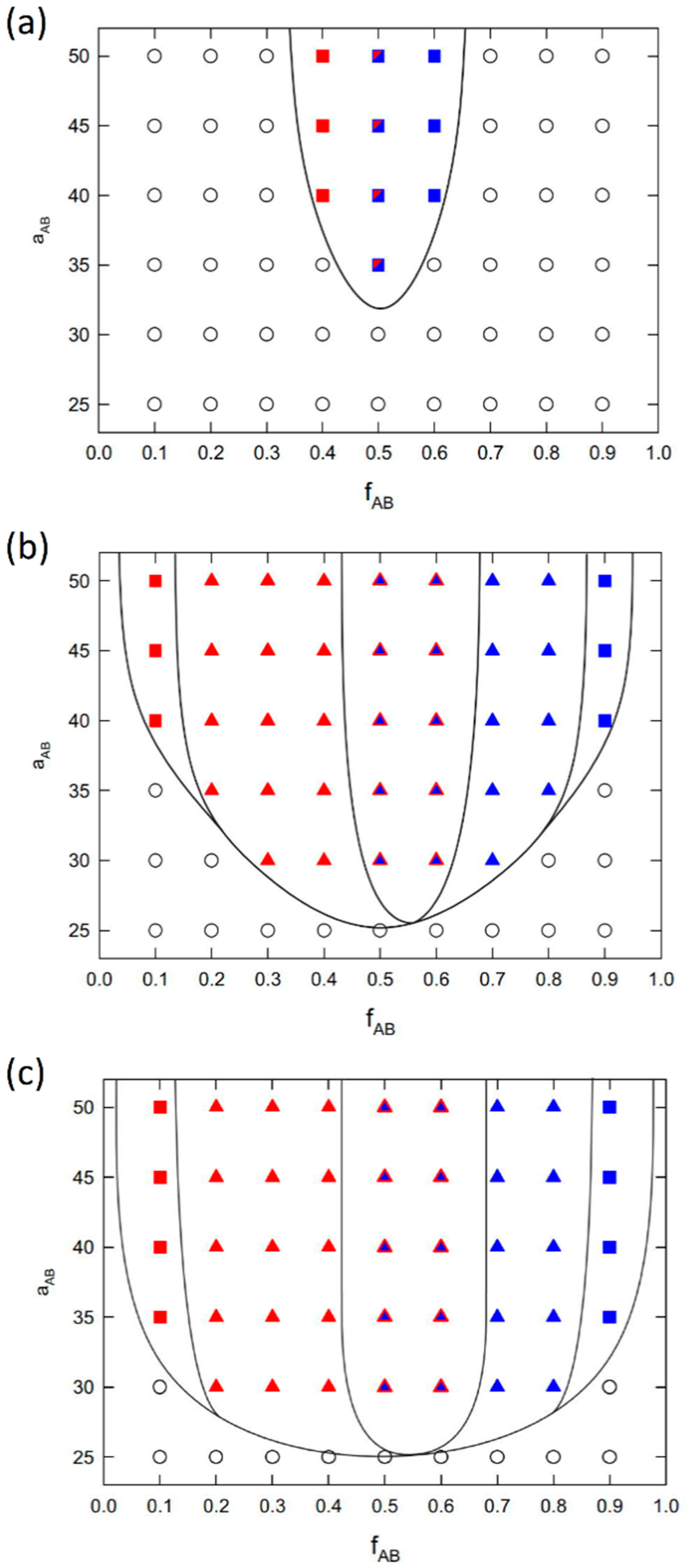
3.4. Phase Behavior of a Polydisperse Y-Shaped Brush
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hou, W.; Liu, Y.; Zhao, H. Surface Nanostructures Based on Assemblies of Polymer Brushes. ChemPlusChem 2020, 85, 998–1007. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Pester, C.W. Mixed Polymer Brushes for “Smart” Surfaces. Polymers 2020, 12, 1553. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.; Jiang, R.; Wang, Z.; Li, B. Influence of Grafting Point Distribution on the Surface Structures of Y-Shaped Polymer Brushes in Solution. Langmuir 2016, 32, 7467–7475. [Google Scholar] [CrossRef] [PubMed]
- Zhao, B.; Zhu, L. Nanoscale Phase Separation in Mixed Poly(tert-butyl acrylate)/Polystyrene Brushes on Silica Nanoparticles under Equilibrium Melt Conditions. Am. Chem. Soc. 2006, 128, 4574–4575. [Google Scholar] [CrossRef] [PubMed]
- Schulz, G.V. Uber Die Kinetik Der Kettenpolymerisationen. Phys. Chem. 1939, 43, 25–46. [Google Scholar] [CrossRef]
- Zimm, B. Apparatus and methods for measurement and interpretation of the angular variation of light scattering; preliminary results on polystyrene solutions. J. Chem. Phys. 1948, 16, 1099–1116. [Google Scholar] [CrossRef]
- Qi, S.H.; Klushin, L.I.; Skvortsov, A.M.; Schmid, F. Polydisperse Polymer Brushes: Internal Structure, Critical Behavior, and Interaction with Flow. Macromolecules 2016, 49, 9665–9683. [Google Scholar] [CrossRef]
- Posel, Z.; Lísal, M.; Brennan, J.K. Interplay between microscopic and macroscopic phase separations in ternary polymer melts: Insight from mesoscale modelling. Fluid Phase Equilib. 2009, 283, 38–48. [Google Scholar] [CrossRef]
- Posel, Z.; Posocco, P. Tuning the Properties of Nanogel Surfaces by Grafting Charged Alkylamine Brushes. Nanomaterials 2019, 9, 1514. [Google Scholar] [CrossRef]
- Posel, Z.; Svoboda, M.; Coray, C.; Lisal, M. Flow and aggregation of rod-like proteins in slit and cylindrical pores coated with polymer brushes: An insight from dissipative particle dynamics. Soft Matter 2017, 13, 1634–1645. [Google Scholar] [CrossRef] [PubMed]
- Brin, E.; Algaer, E.A.; Ganguly, P.; Li, C.; Rodriguez-Ropero, F.; Van der Vegt, N.F.A. Systematic coarse-graining methods for soft matter simulations—A review. Soft Matter 2013, 9, 2108–2119. [Google Scholar] [CrossRef]
- Pivkin, I.V.; Karniadakis, G.E. A new method to impose no-slip boundary conditions in dissipative particle dynamics. J. Comput. Phys. 2005, 207, 114–128. [Google Scholar] [CrossRef]
- Turgman, C.S.; Srogl, J.; Kiserow, D.; Genzer, J. On-demand degrafting and the study of molecular weight and grafting density of Poly(methyl methacrylate) brushes on flat silica substrates. Langmuir 2015, 31, 2372–2381. [Google Scholar]
- Gao, H.M.; Liu, H.; Lu, Z.Y.; Sun, Z.Y.; An, L.J. The structures of thin layer formed by microphase separation of grafted Y-shaped block copolymers in solutions. J. Chem. Phys. 2013, 138, 224905–224914. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fridrich, P.; Posel, Z. Self-Assembly of Y-Shaped Polymer Brushes with Low Poly-Dispersity. Mater. Proc. 2022, 9, 26. https://doi.org/10.3390/materproc2022009026
Fridrich P, Posel Z. Self-Assembly of Y-Shaped Polymer Brushes with Low Poly-Dispersity. Materials Proceedings. 2022; 9(1):26. https://doi.org/10.3390/materproc2022009026
Chicago/Turabian StyleFridrich, Petr, and Zbyšek Posel. 2022. "Self-Assembly of Y-Shaped Polymer Brushes with Low Poly-Dispersity" Materials Proceedings 9, no. 1: 26. https://doi.org/10.3390/materproc2022009026