
Design of Three-Level NPC AC/DC Bidirectional Converter Using Model Predictive Controller for DC Bus Voltage Stability of Subway †


Abstract
:1. Introduction
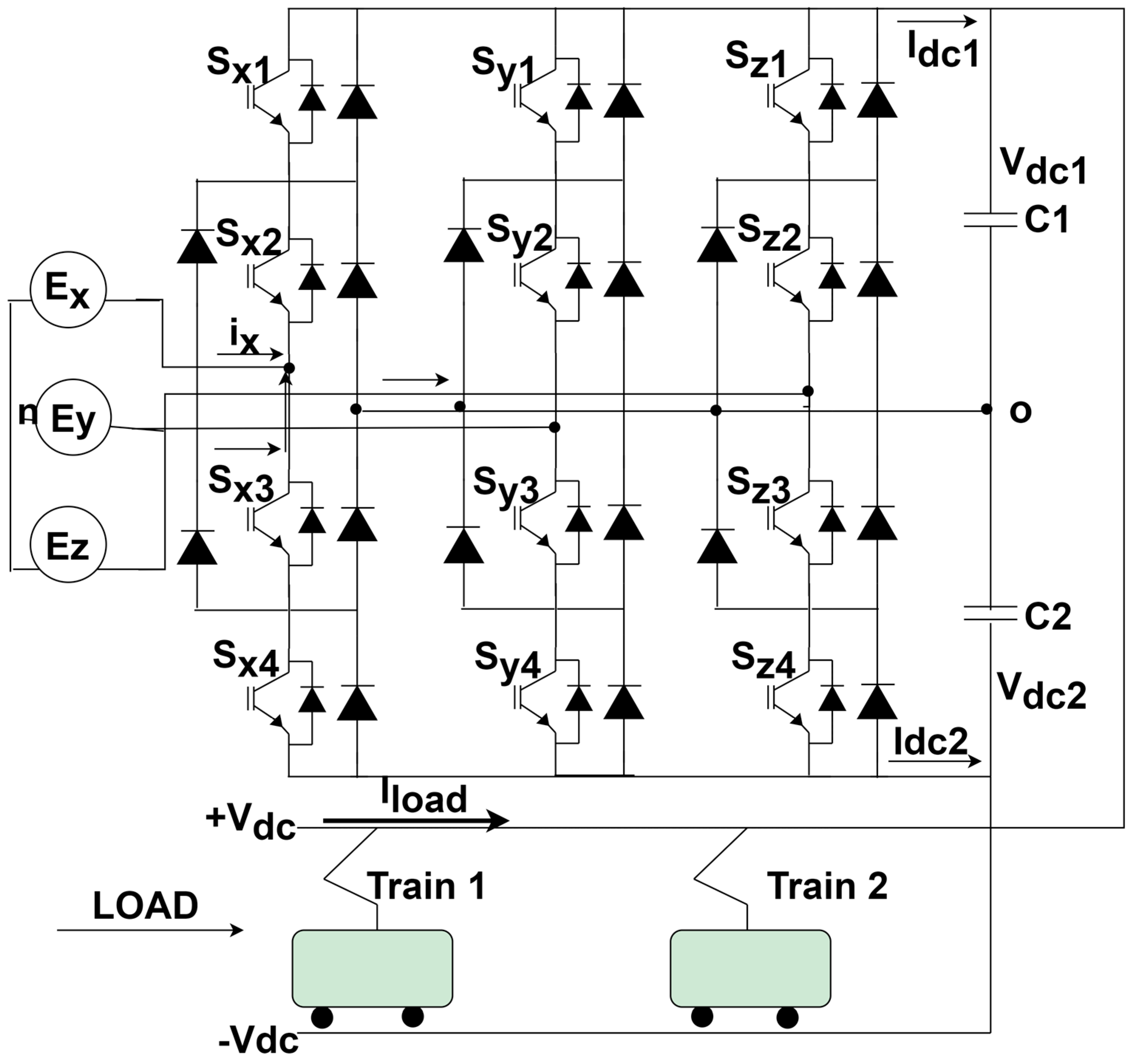
2. AC-DC Bi-Directional NPC Topology
System Configuration
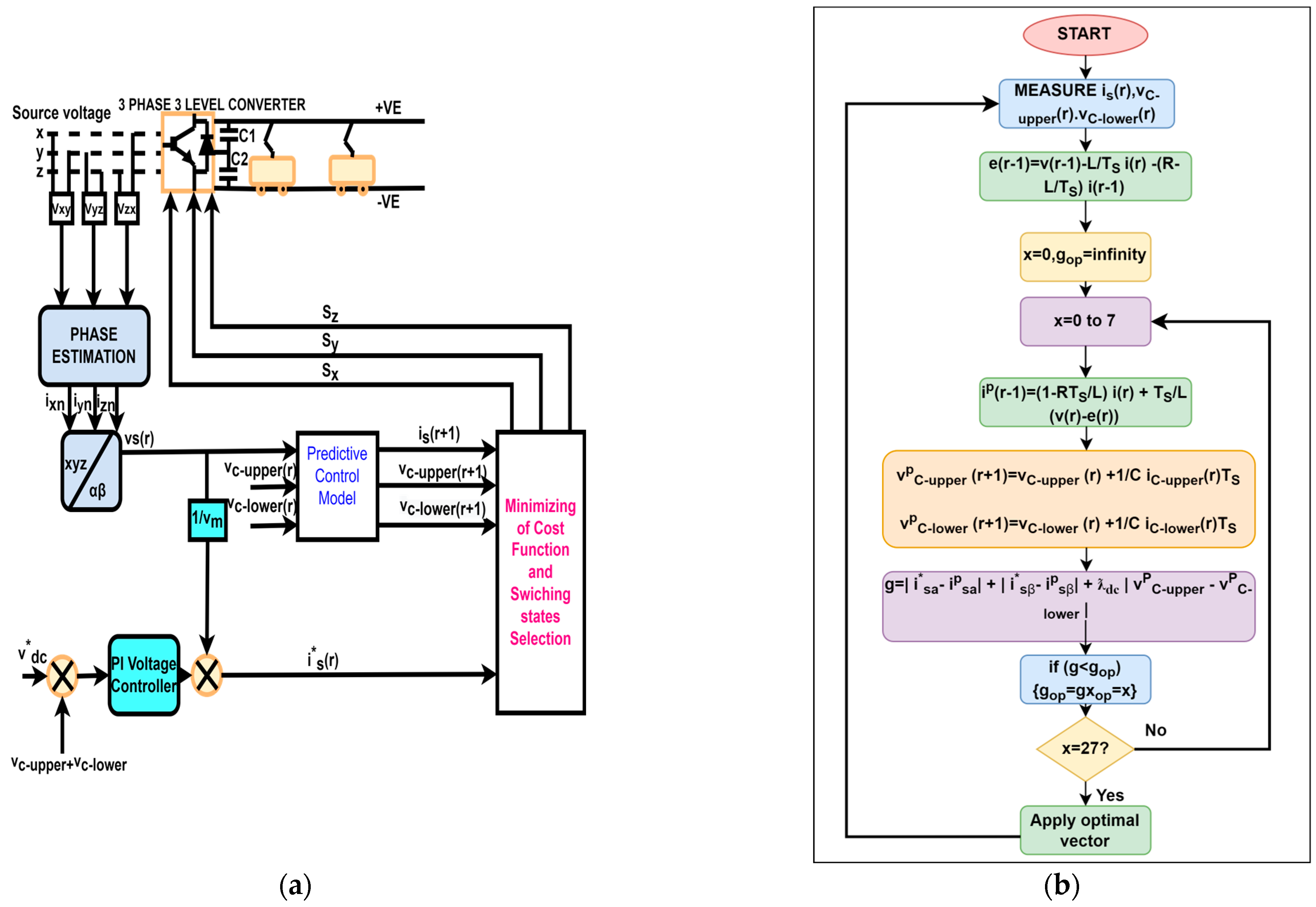
3. Proposed Model Predictive Control Method
3.1. Conventional PI Control Method
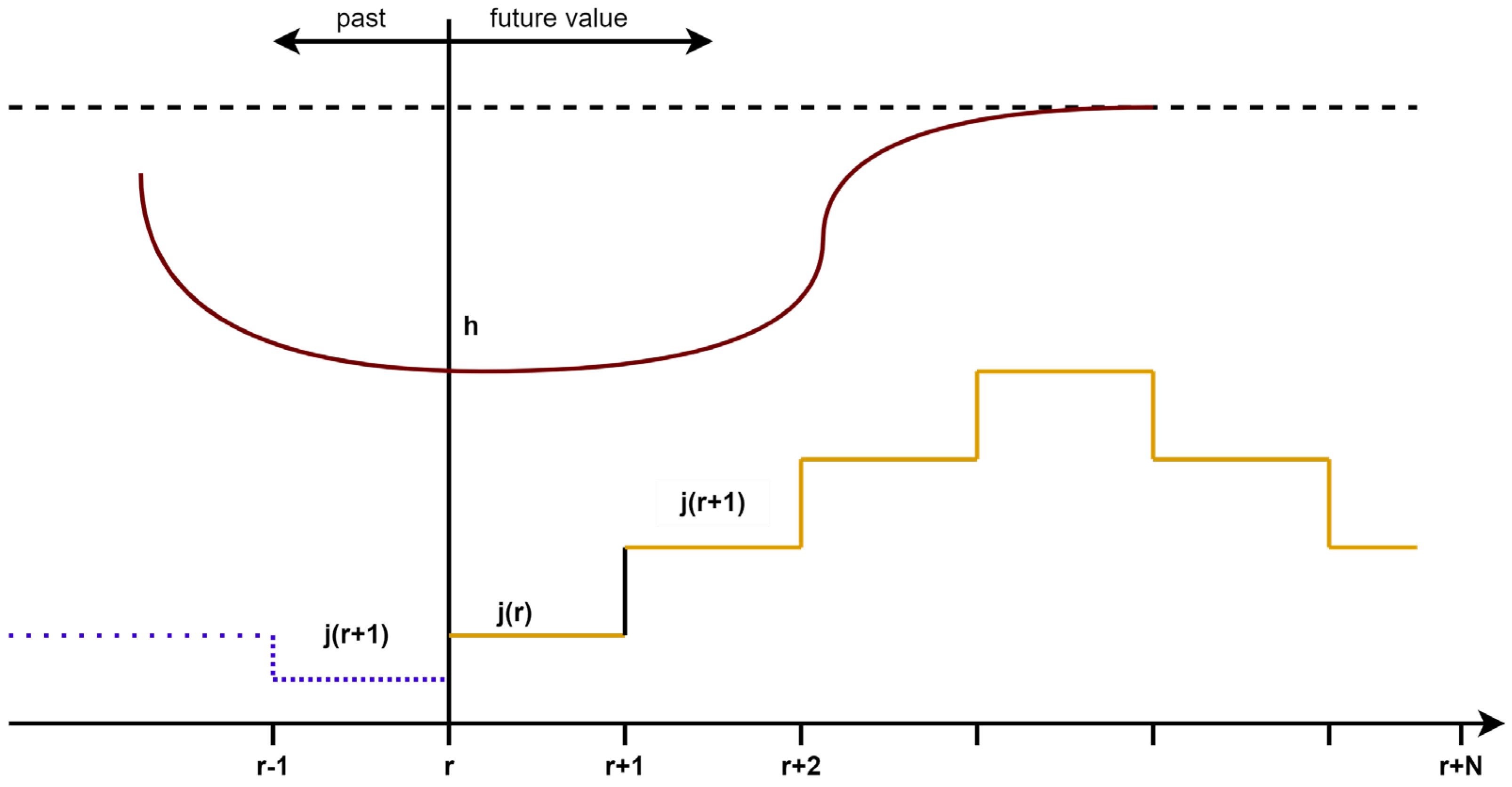
3.2. Model Predictive Controller
3.2.1. Capacitor Voltage Control on Output of Converter
3.2.2. Cost Function
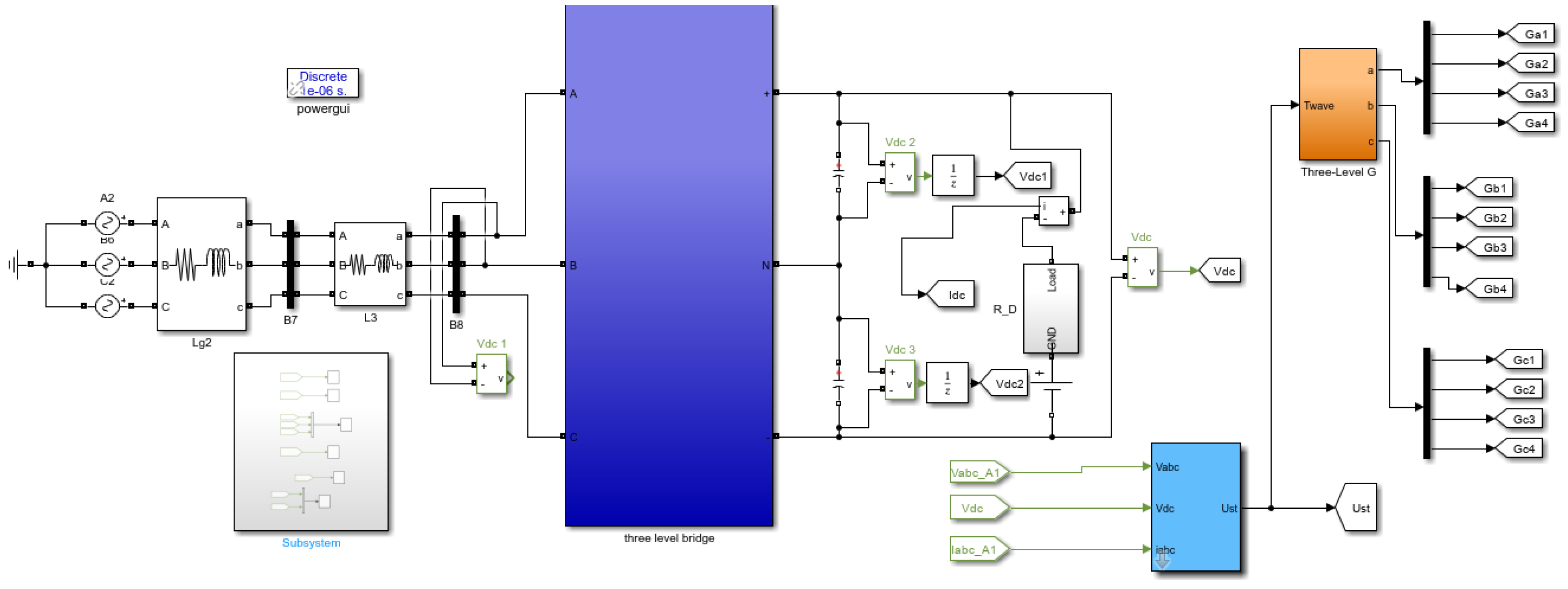
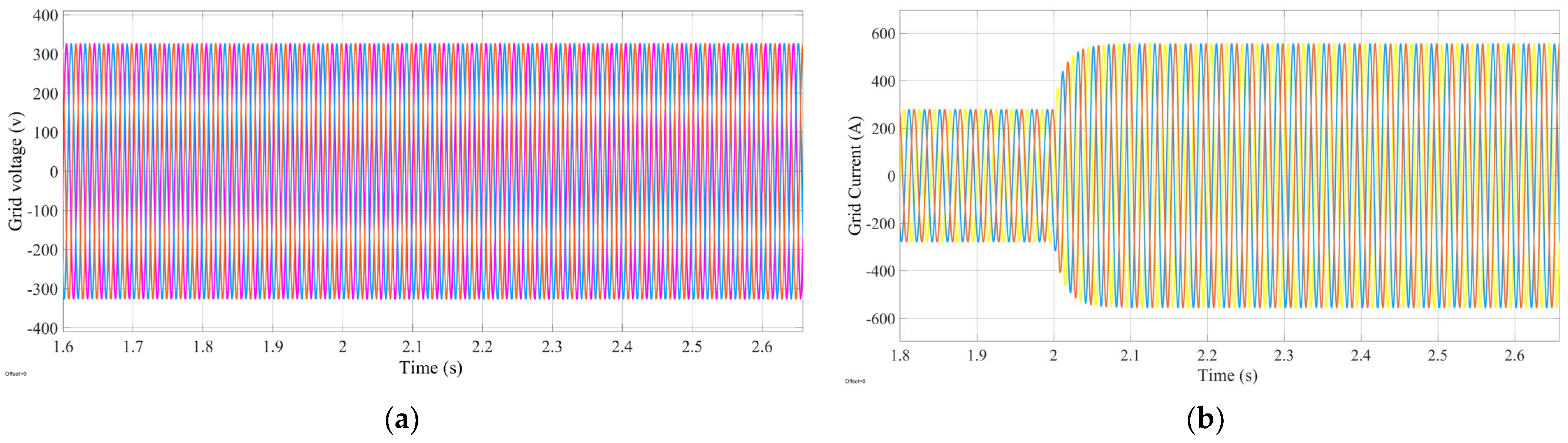
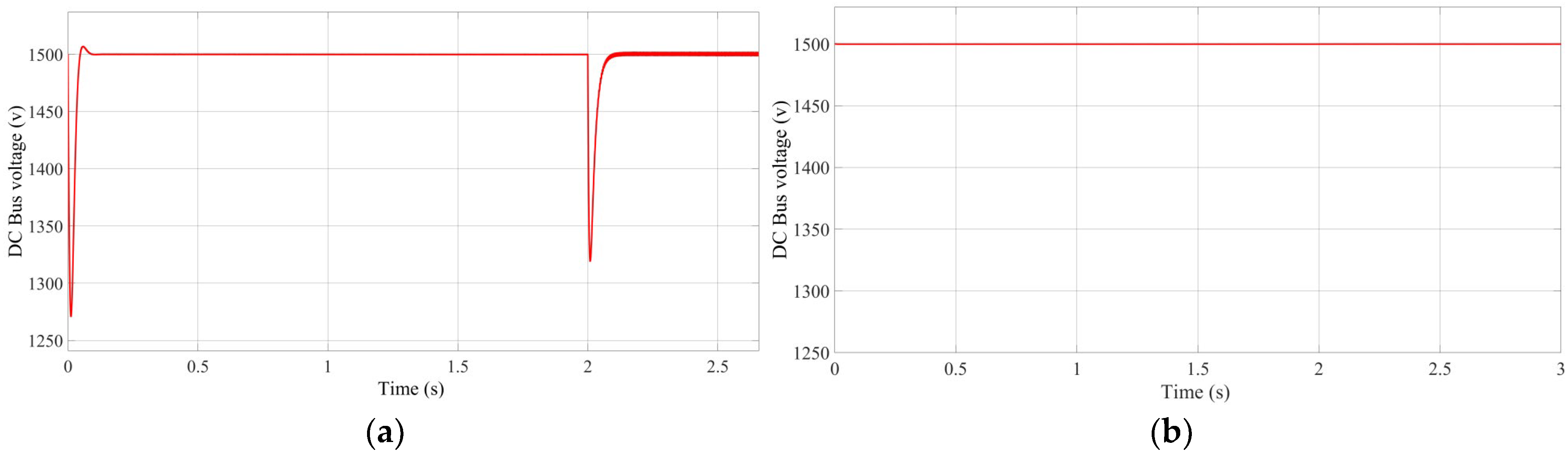
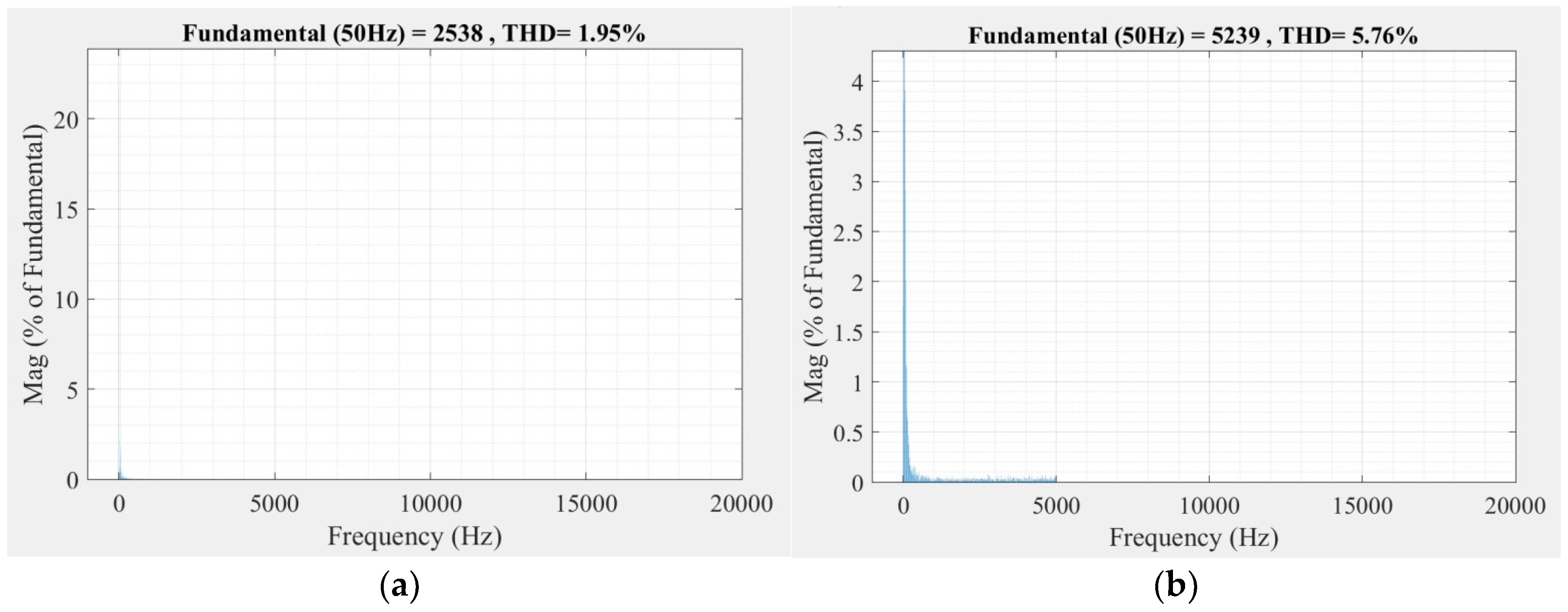
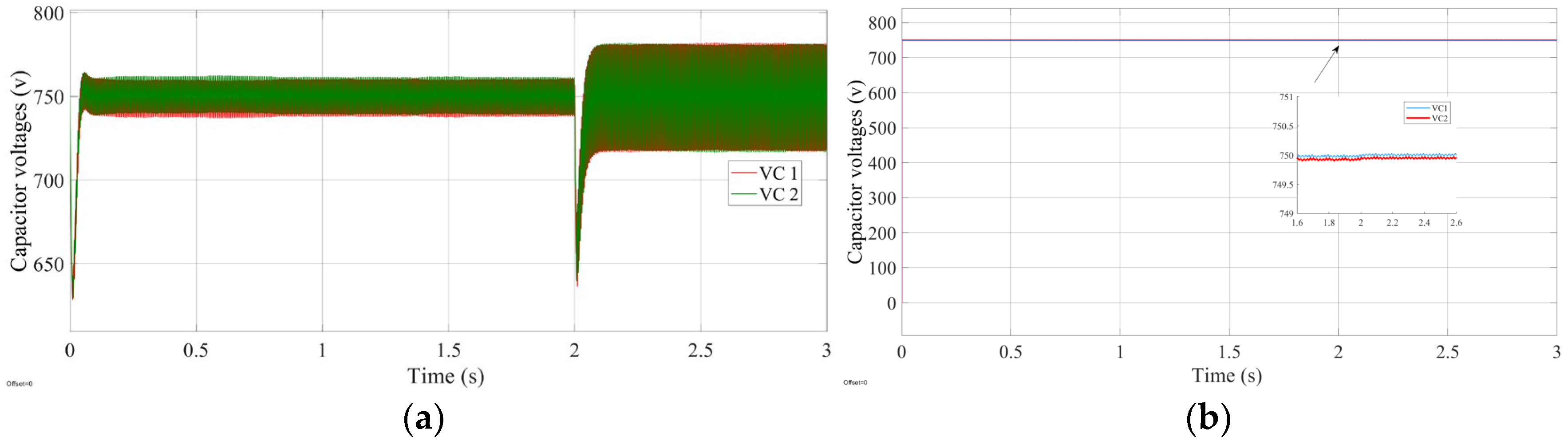
4. Simulation and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cheok, A.D.; Kawamoto, S.; Matsumoto, T.; Obi, H. High power AC/DC converter and DC/AC inverter for high speed train applications. In Proceedings of the 2000 TENCON Proceedings. Intelligent Systems and Technologies for the New Millennium (Cat. No.00CH37119), Kuala Lumpur, Malaysia, 24–27 September 2000; pp. 423–428. [Google Scholar]
- Lai, J.-S.; Peng, F.Z. Multilevel converters—A new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar]
- Tian, K.; Wu, B.; Narimani, M.; Xu, D.; Cheng, Z.; Zargari, N.R. A capacitor voltage-balancing method for nested neutral point clamped (NNPC) inverter. IEEE Trans. Power Electron. 2016, 31, 2575–2583. [Google Scholar] [CrossRef]
- Gutierrez, B.; Kwak, S. Model predictive control with pre selection technique for reduced calculation burden in modular multilevel converters. IEEE Trans. Power Electron. 2018, 33, 9176–9187. [Google Scholar] [CrossRef]
- Bahrami, A.; Narimani, M. A new five-level T-Type nested neutral point clamped (T-NNPC) converter. IEEE Trans. Power Electron. 2019, 34, 10534–10545. [Google Scholar] [CrossRef]
- Tan, G.; Deng, Q.; Liu, Z. An optimized SVPWM strategy for fivel evel active NPC (5L-ANPC) converter. IEEE Trans. Power Electron. 2014, 29, 386–395. [Google Scholar] [CrossRef]
- Xu, J.; Zhao, C.; Xiong, Y.; Li, C.; Ji, Y.; An, T. Optimal design of MMC levels for electromagnetic transient studies of MMC-HVDC. IEEE Trans. Power Deliv. 2016, 31, 1663–1672. [Google Scholar] [CrossRef]
- de Freitas, I.S.; Bandeira, M.M.; Barros, L.D.M.; Jacobina, C.B.; Santos, E.C.D.; Salvadori, F.; da Silva, S.A. A carrier-based PWM technique for capacitor voltage balancing of single-phase three-level neutral-point-clamped converters. IEEE Trans. Ind. Appl. 2015, 51, 3227–3235. [Google Scholar] [CrossRef]
- Tallam, R.M.; Naik, R.; Nondahl, T.A. A carrier-based PWM scheme for neutral-point voltage balancing in three-level inverters. IEEE Trans. Ind. Appl. 2005, 41, 1734–1743. [Google Scholar] [CrossRef]
- Choi, U.-M.; Lee, H.-H.; Lee, K.-B. Simple neutral-point voltage control for three-level inverters using a discontinuous pulse width modulation. IEEE Trans. Energy Convers. 2013, 28, 434–443. [Google Scholar] [CrossRef]
- Wu, W.; Wang, D.; Liu, L. A multi-layer sequential model predictive control of three-phase two-leg seven-level T-type nested neutral point clamped converter without weighting factors. IEEE Access 2019, 7, 162735–162746. [Google Scholar] [CrossRef]
- Teichmann, R.; Bernet, S. A comparison of three-level converters versus two-level converters for low-voltage drives, traction, and utility applications. IEEE Trans. Ind. Appl. 2005, 41, 855–865. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sg | Sg1 | Sg2 | Sg3 | Sg4 | ᶹg0 |
|---|---|---|---|---|---|
| +ve | ON | ON | OFF | OFF | Vdc/2 |
| zero | OFF | ON | ON | OFF | 0 |
| −ve | OFF | OFF | ON | ON | −Vdc/2 |
| Switching Symbol | Switching State | Pole Voltage | ||||
|---|---|---|---|---|---|---|
| Ux1 | Ux4 | Sx1 | Sx2 | Sx3 | Sx4 | |
| 1 | 0 | ON | ON | OFF | OFF | Vdc/2 |
| 0 | 0 | OFF | ON | ON | OFF | 0 |
| 0 | 1 | OFF | OFF | ON | ON | −Vdc/2 |
| 1 | 1 | ON | OFF | OFF | ON | Floating |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ihsan, M.; Yang, S. Design of Three-Level NPC AC/DC Bidirectional Converter Using Model Predictive Controller for DC Bus Voltage Stability of Subway. Eng. Proc. 2023, 46, 37. https://doi.org/10.3390/engproc2023046037
Ihsan M, Yang S. Design of Three-Level NPC AC/DC Bidirectional Converter Using Model Predictive Controller for DC Bus Voltage Stability of Subway. Engineering Proceedings. 2023; 46(1):37. https://doi.org/10.3390/engproc2023046037
Chicago/Turabian StyleIhsan, Mohsin, and Shunfeng Yang. 2023. "Design of Three-Level NPC AC/DC Bidirectional Converter Using Model Predictive Controller for DC Bus Voltage Stability of Subway" Engineering Proceedings 46, no. 1: 37. https://doi.org/10.3390/engproc2023046037