Design of Type 2 Fuzzy Logic Controller for FESTO Process Workstation †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fuzzy Logic
2.1. Definition
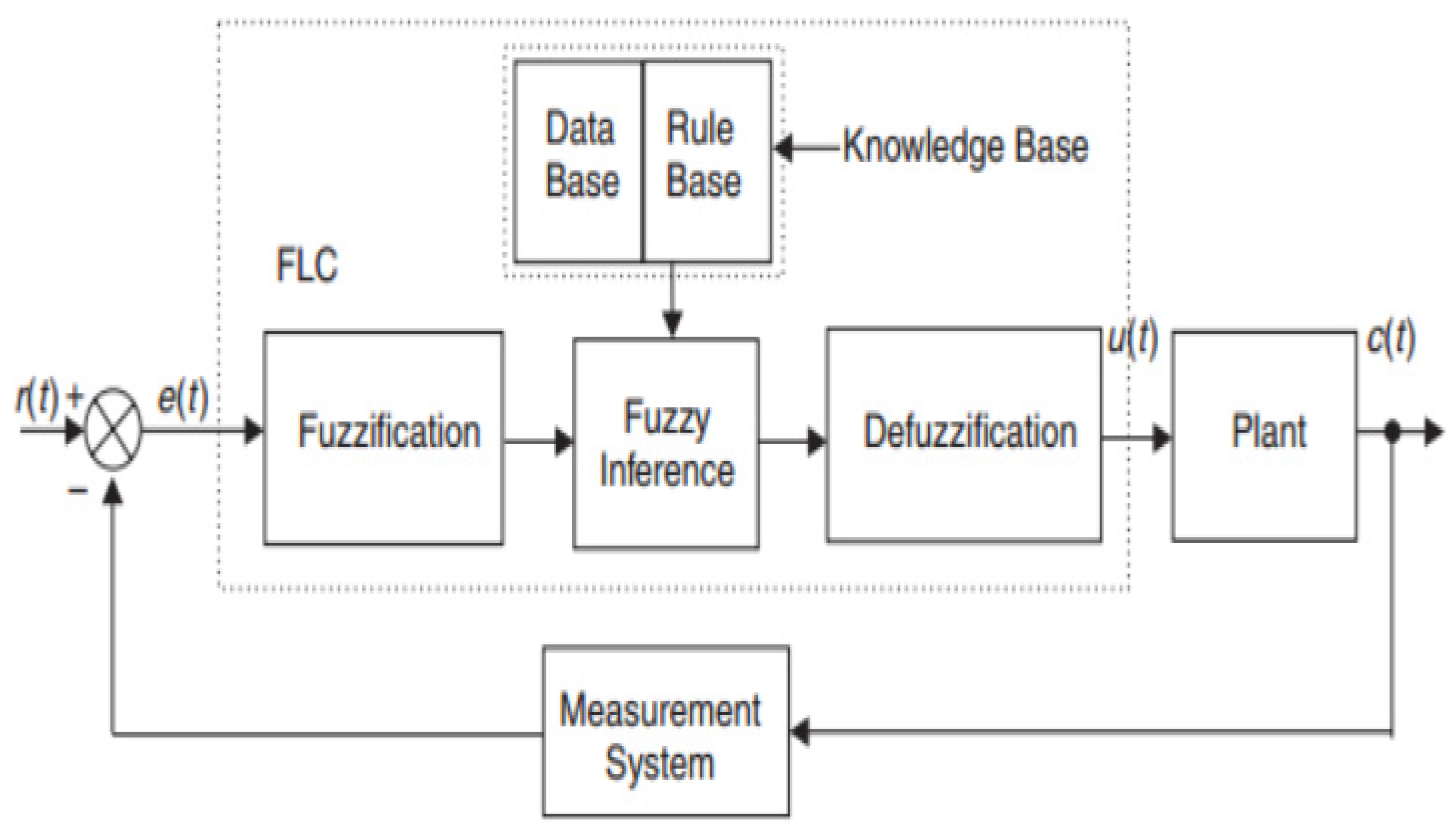
2.2. Fuzzy Logic Control
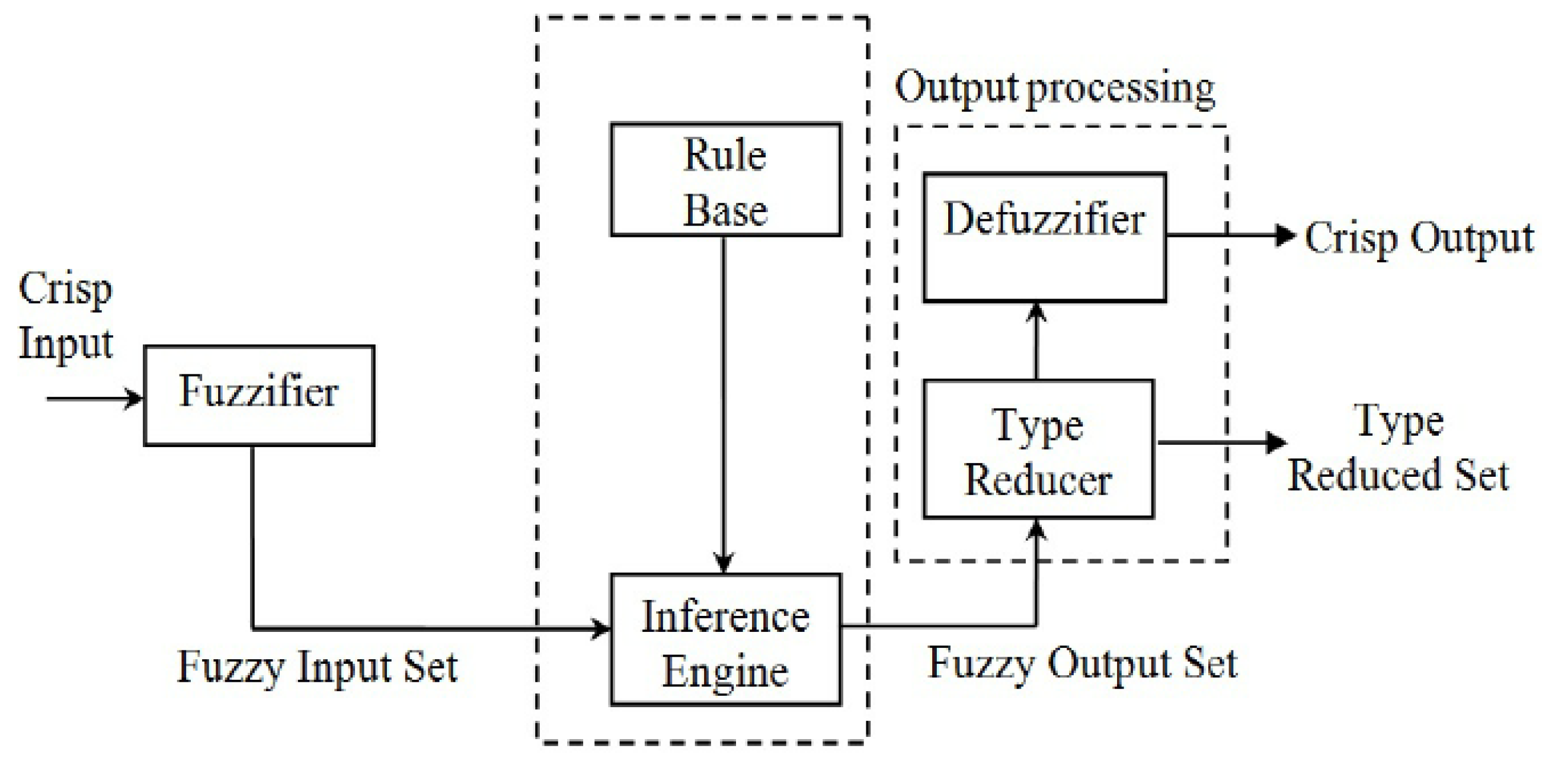
3. Type 2 Fuzzy Logic
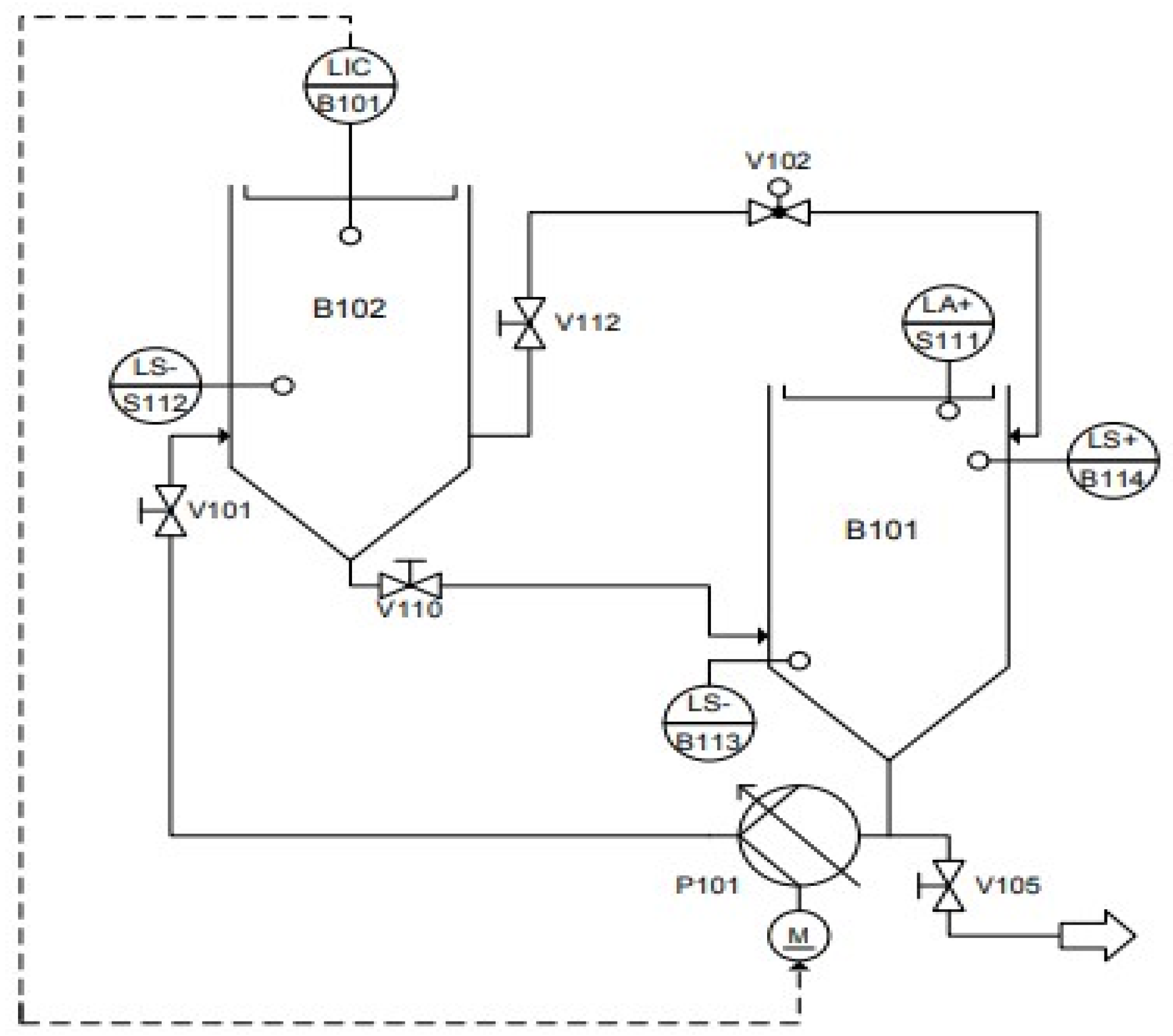
4. Process Description (FESTO MPS PA Compact Workstation)
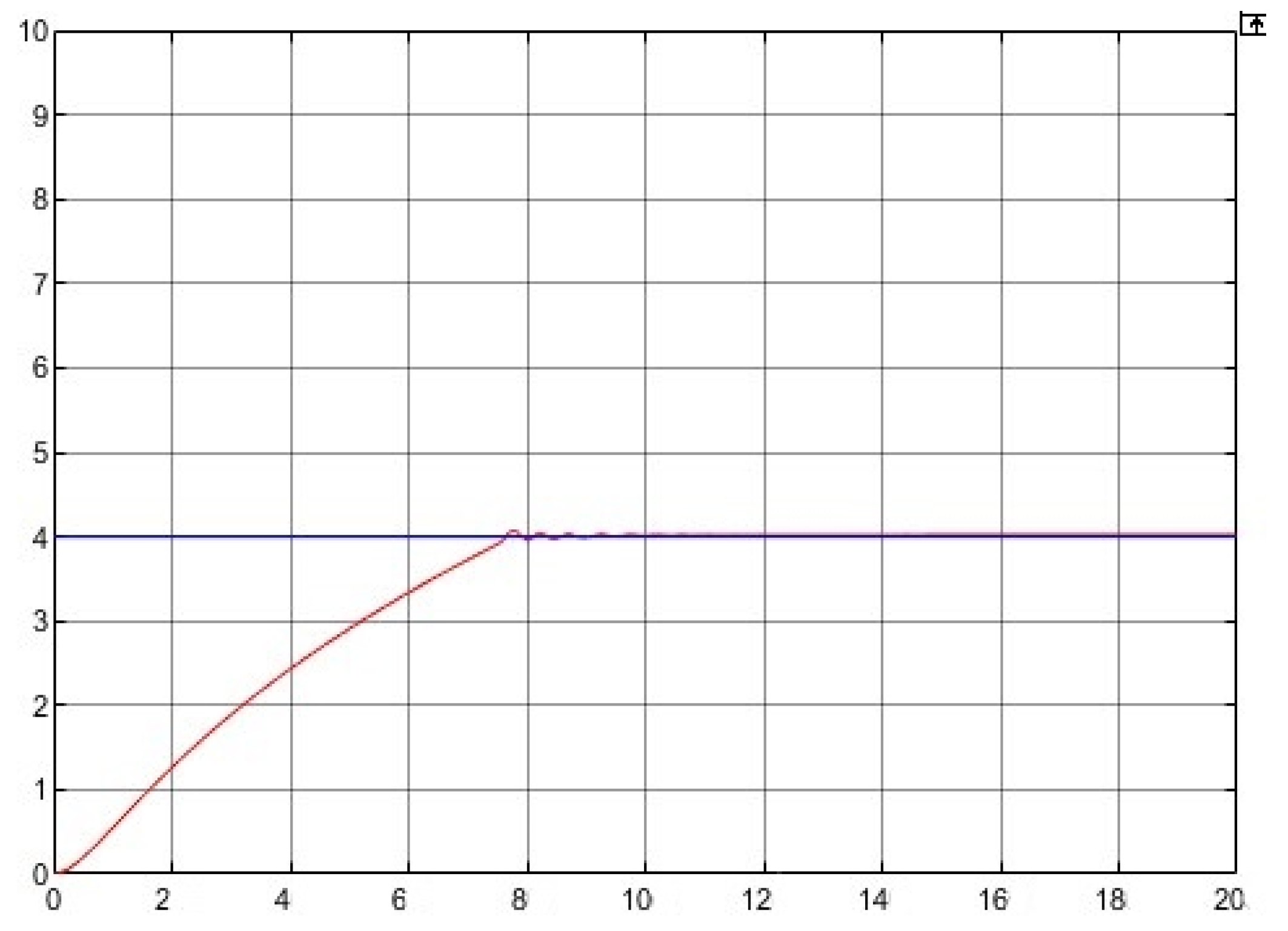
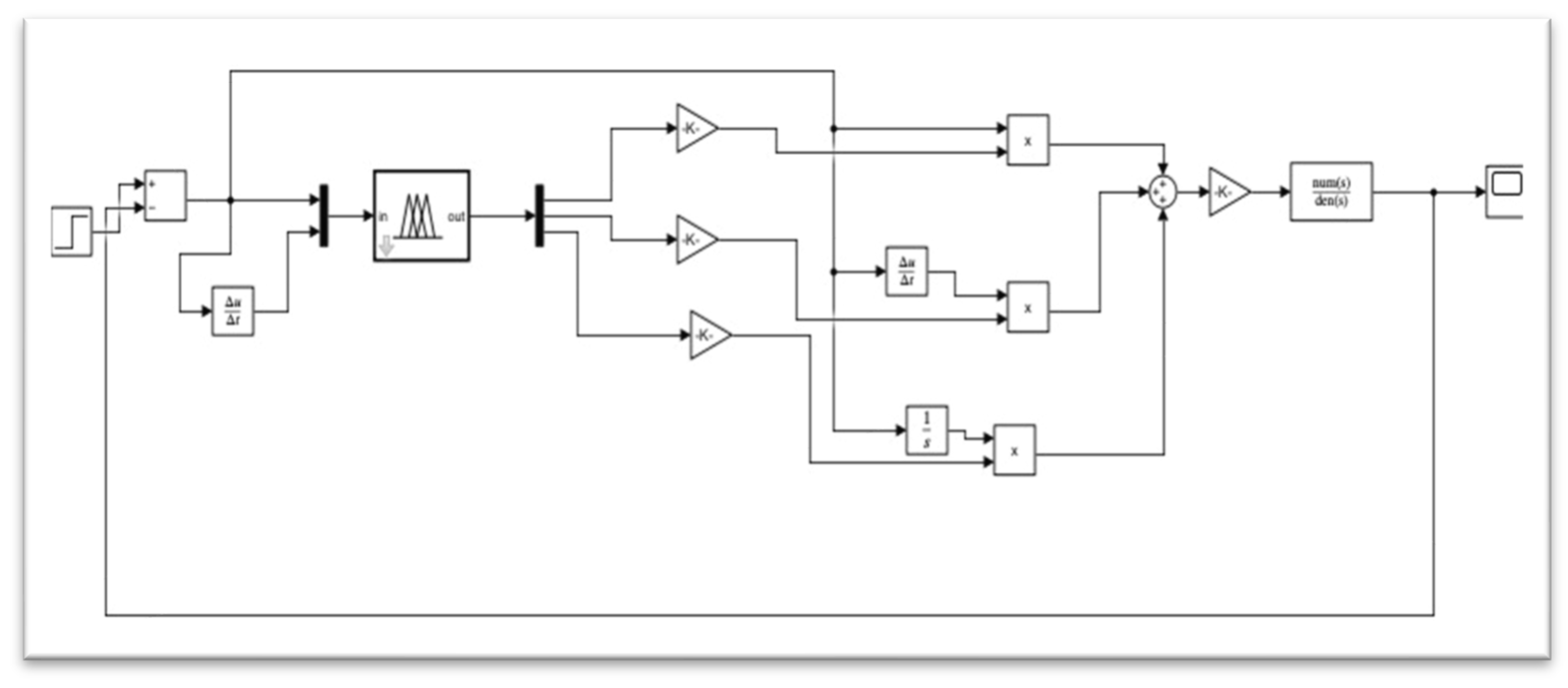
5. Simulation and Results
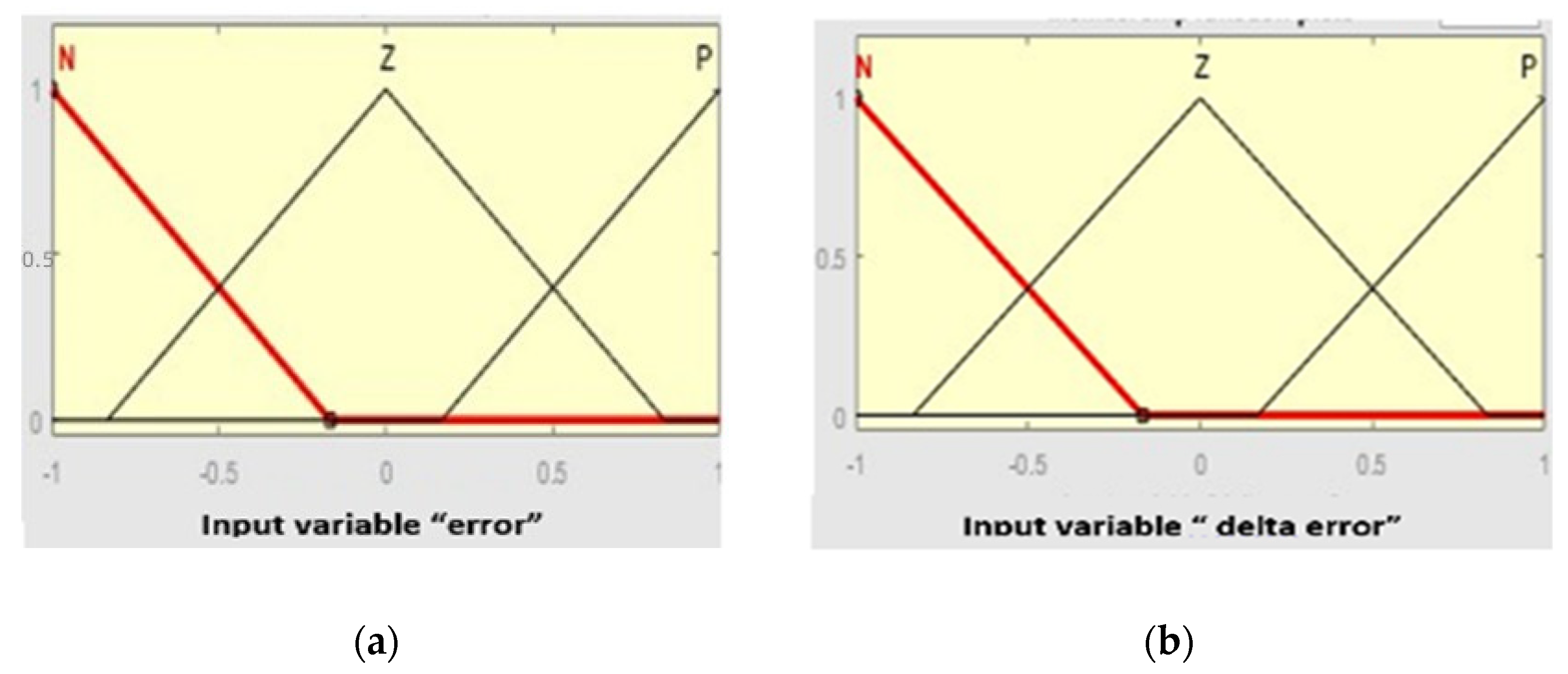
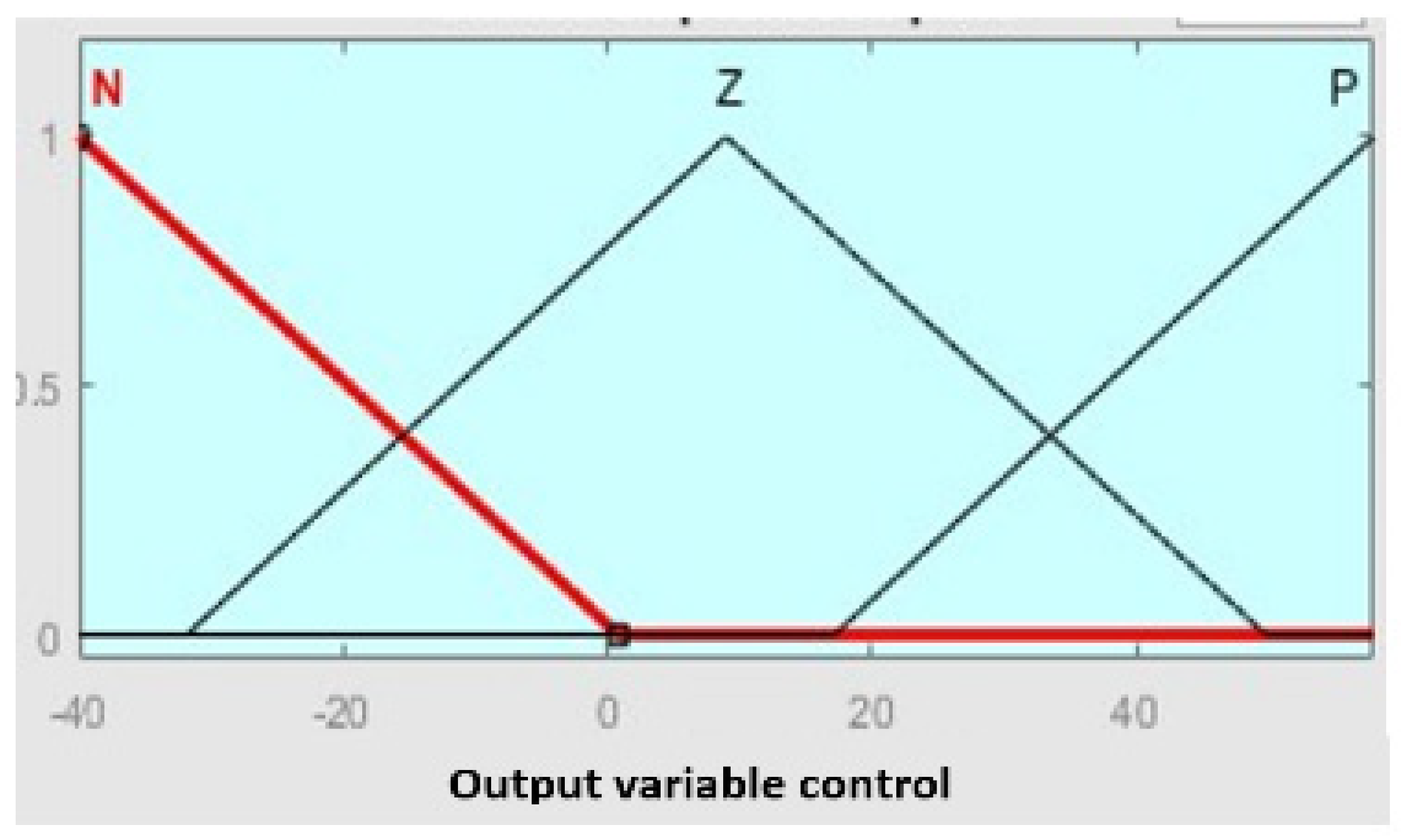
5.1. Simple Type 1 Fuzzy Logic Controller
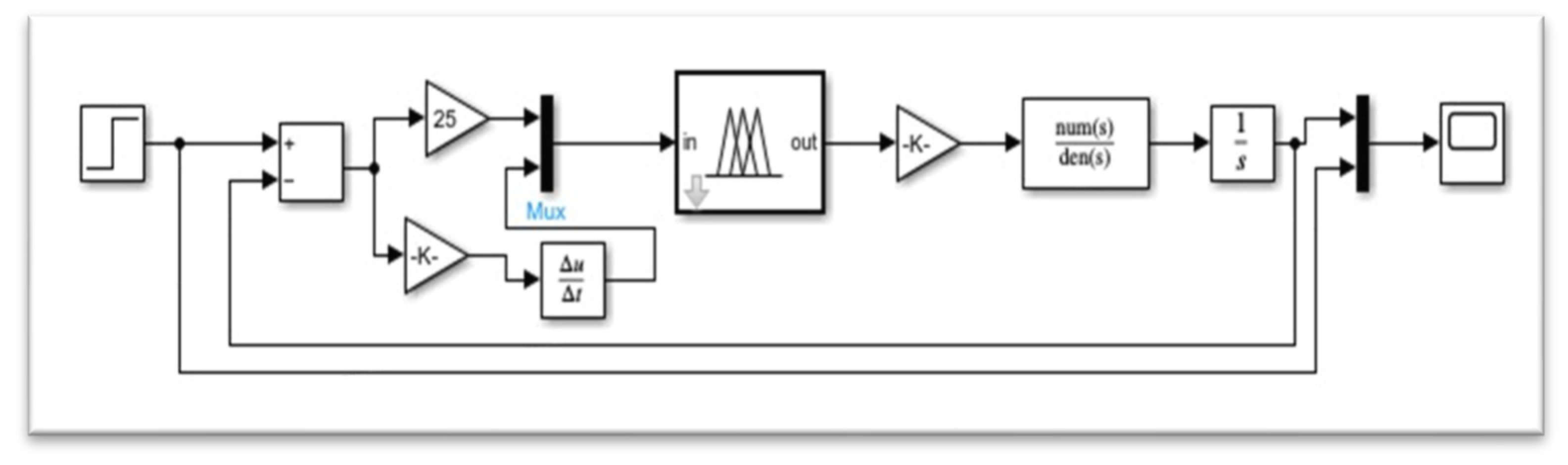
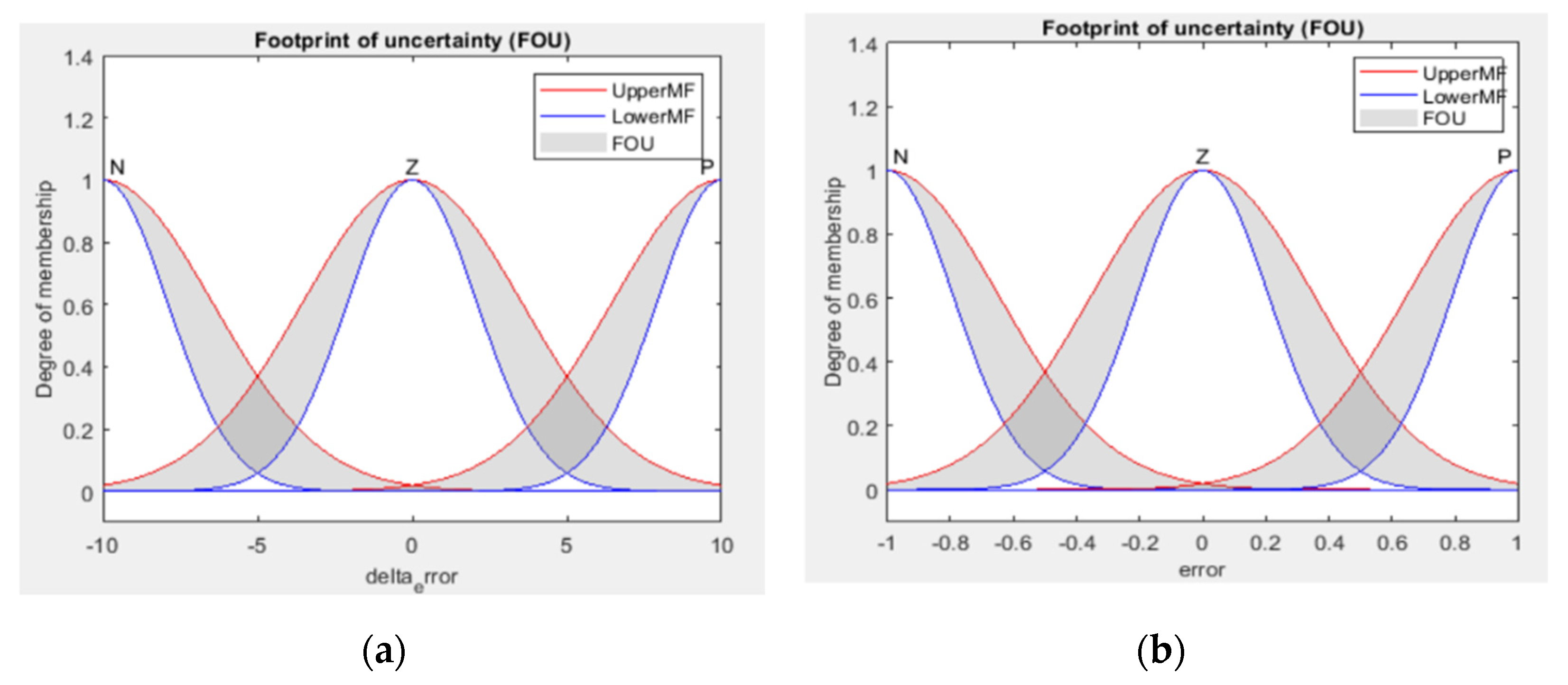
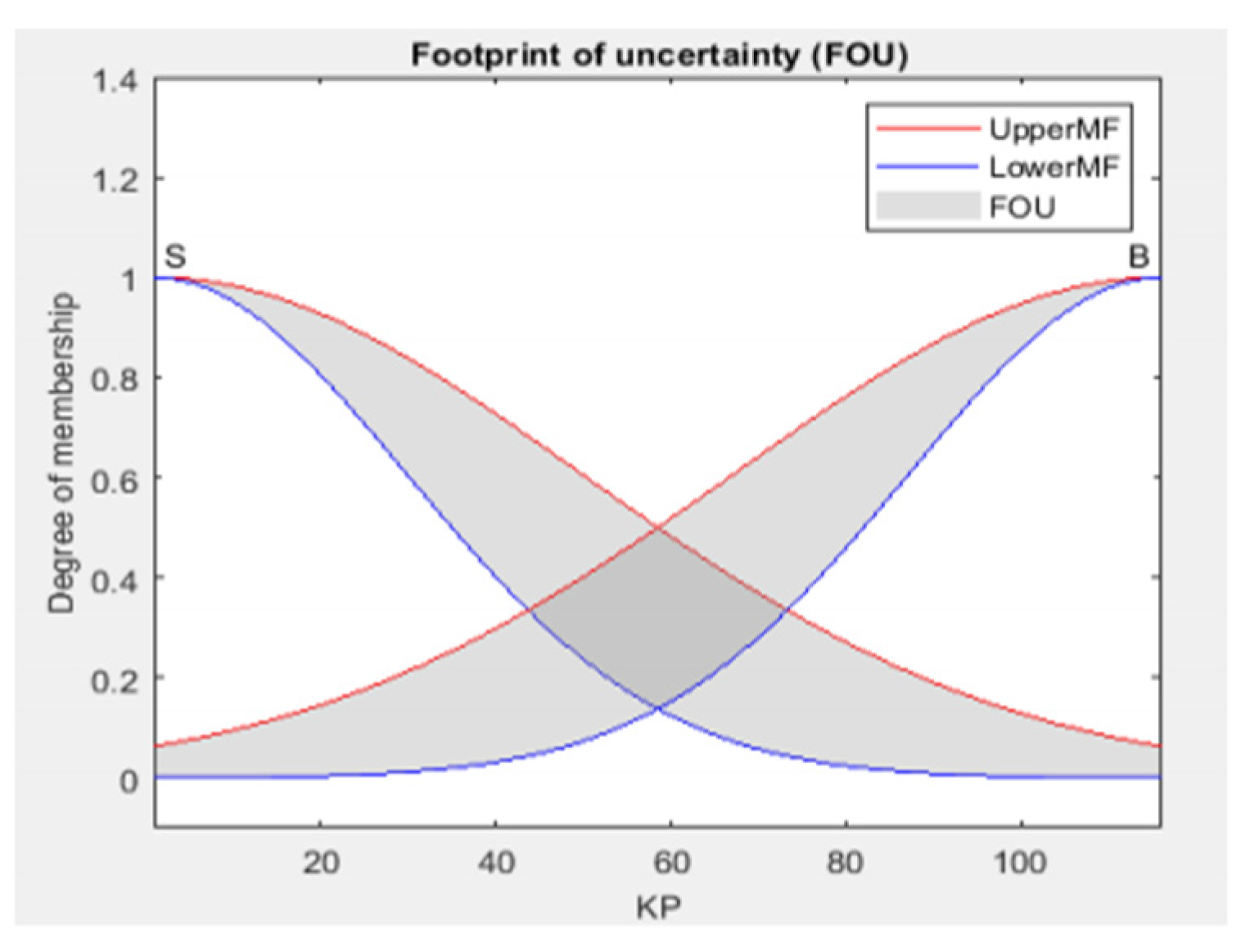
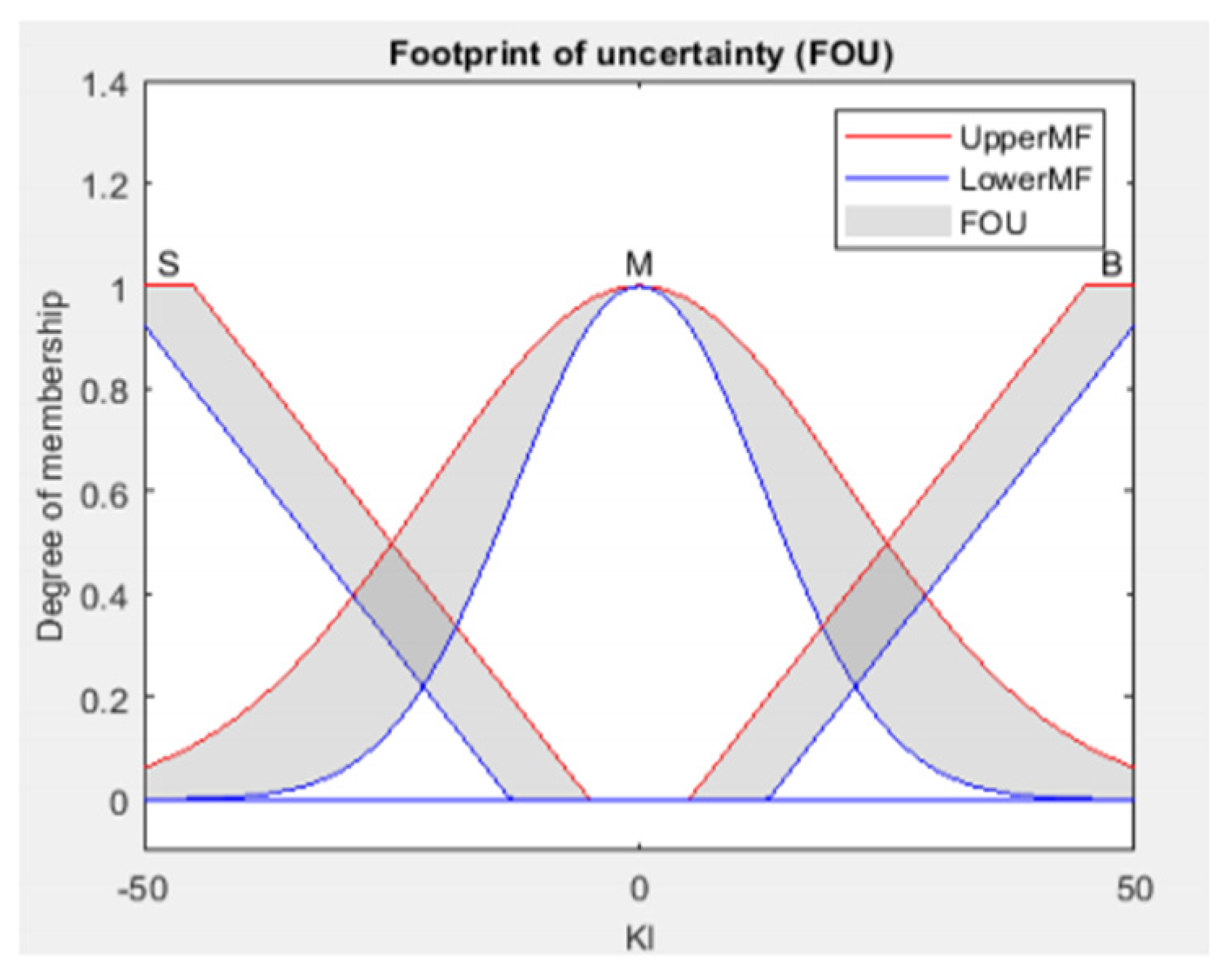
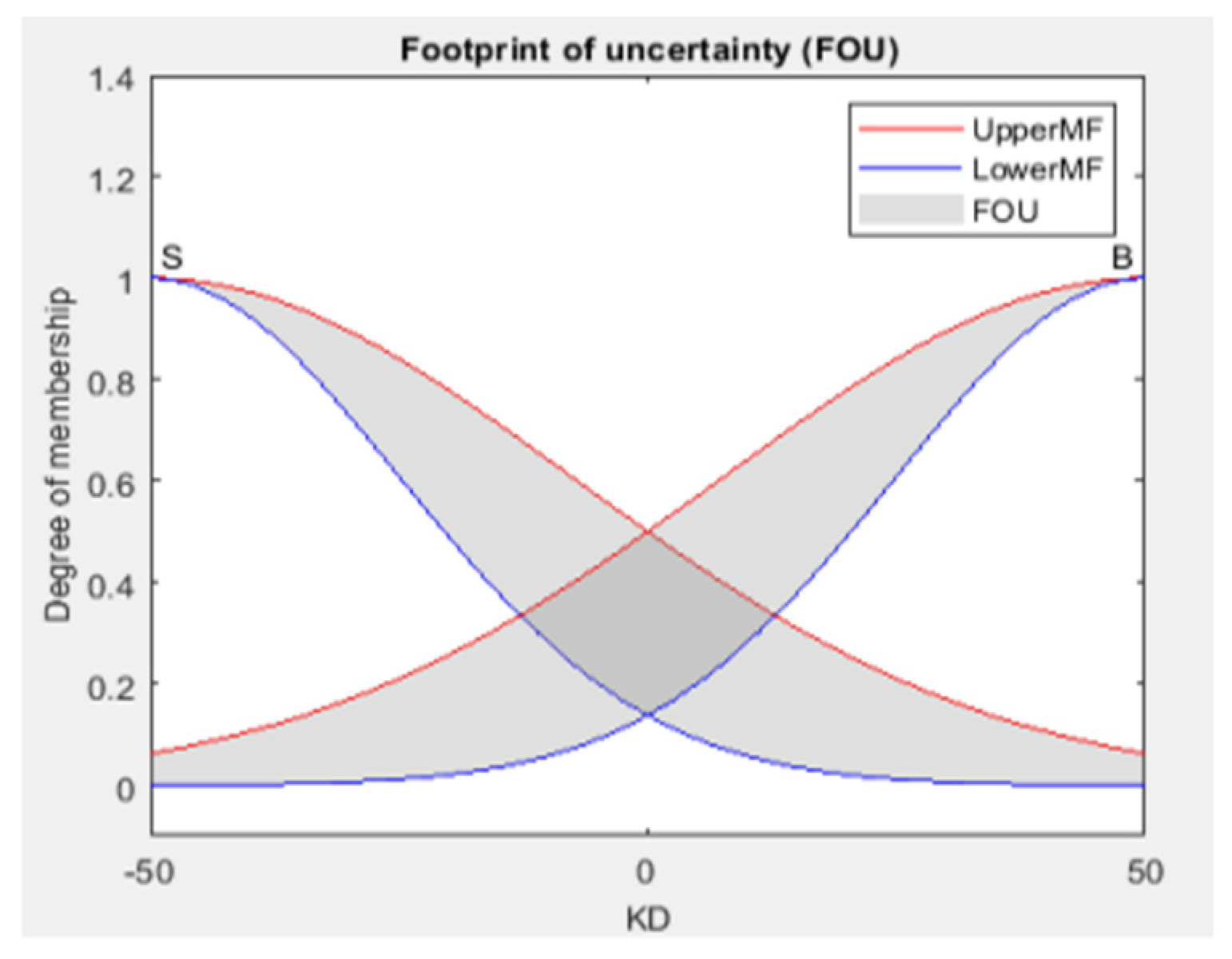
5.2. Type 2 Fuzzy PID Controller
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Garvin, T.; Sinott, R. Chemical Engineering Design, Principles, Practice and Economics of Plant and Process Design; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Bendib, R.; Bentarzi, H. Contribution to Improve the Dynamic Control of a Binary Distillation Column. Int. J. Syst. Assur. Eng. Manag. 2017, 8, 663–675. [Google Scholar] [CrossRef]
- Bendib, R. Optimization and Improvement of the Overall Performances of an Industrial Plant. Ph.D. Thesis, University of M’hamed Bougerra, Boumerdes, Algeria, 2017. [Google Scholar]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2005; ISBN 978-0-470-01167-6. [Google Scholar]
- Bendib, R.; Hammadi, Y.; Mazouzi, M.; Mechhoud, E. Particle Swarm Optimization for Tuning a Fuzzy Supervisory Controller Parameters (Takagi Seguno and Mamdani Engines). Alger. J. Signals Syst. 2020, 5, 92–97. [Google Scholar] [CrossRef]
- Castillo, O.; Castro, J.R.; Melin, P. Type-2 Fuzzy Logic Systems. In Interval Type-3 Fuzzy Systems: Theory and Design; Castillo, O., Castro, J.R., Melin, P., Eds.; Studies in Fuzziness and Soft Computing; Springer International Publishing: Cham, Switzerland, 2022; pp. 5–11. ISBN 978-3-030-96515-0. [Google Scholar]
- Karnik, N.N.; Mendel, J.M. Operations on Type-2 Fuzzy Sets. Fuzzy Sets Syst. 2001, 122, 327–348. [Google Scholar] [CrossRef]
- Koszewnik, A.; Nartowicz, T.; Pawłuszewicz, E. Fractional Order Controller to Control Pump in FESTO MPS® PA Compact Workstation. In Proceedings of the 2016 17th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 29 May–1 June 2016; pp. 364–367. [Google Scholar]
- Feijoo, J.D.; Chanchay, D.J.; Llanos, J.; Ortiz-Villalba, D. Advanced Controllers for Level and Temperature Process Applied to Virtual Festo MPS® PA Workstation. In Proceedings of the 2021 IEEE International Conference on Automation/XXIV Congress of the Chilean Association of Automatic Control (ICA-ACCA), Valparaíso, Chile, 22–26 March 2021; pp. 1–6. [Google Scholar]
- Nguyen, H.T.; Walker, C.L.; Walker, E.A. A First Course in Fuzzy Logic, 4th ed.; Chapman and Hall/CRC: Boca Raton, FL, USA, 2018; ISBN 978-1-138-58508-9. [Google Scholar]
- Timothy, J.R. Fuzzy Logic with Engineering Applications, 4th ed.; Wiley: Hoboken, NJ, USA, 2016; Available online: https://www.wiley.com/en-br/Fuzzy+Logic+with+Engineering+Applications%2C+4th+Edition-p-9781119235866 (accessed on 30 November 2022).
- Kosko, B.; Tomos, M. Fuzzy Thinking: The New Science of Fuzzy Logic; Hyperion: New York, NY, USA, 1993. [Google Scholar]
- Iron, I. Fuzzy Logic-Controls, Concepts, Theories and Applications Logic with Engineering Applications, 1st ed.; Dadios, E.P., Ed.; BoD–Books on Demand: Norderstedt, Germany, 2018. [Google Scholar]
- King, E.R. Computational Intelligence in Control Engineering; CRC Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Lee, C.C. Fuzzy Logic in Control Systems: Fuzzy Logic Controller. II. IEEE Trans. Syst. Man Cybern. 1990, 20, 419–435. [Google Scholar] [CrossRef]
- Larkin, L.I. A Fuzzy Logic Controller for Aircraft Flight Control. In Proceedings of the 23rd IEEE Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 1984; pp. 894–897. [Google Scholar]
- Zadeh, L.A. Fuzzy Sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L.A. Outline of a New Approach to the Analysis of Complex Systems and Decision Processes. IEEE. 1973. Available online: https://ieeexplore.ieee.org/document/5408575 (accessed on 30 November 2022).
- Sankata, B.P.; Umesh, C.P.; Kamalakanta, M. Implementation of Fuzzy-PID Controller to Liquid Level System Using LabVIEW. Available online: https://ieeexplore.ieee.org/document/6959045 (accessed on 30 November 2022).
- Ahmad, S.; Ali, S.; Tabasha, R. The Design and Implementation of a Fuzzy Gain-Scheduled PID Controller for the Festo MPS PA Compact Workstation Liquid Level Control. Eng. Sci. Technol. Int. J. 2020, 23, 307–315. [Google Scholar] [CrossRef]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Riad, B.; El-Arkam, M.; Maroua, K.; Wiam, K.; Youcef, Z. Design of Type 2 Fuzzy Logic Controller for FESTO Process Workstation. Eng. Proc. 2023, 29, 6. https://doi.org/10.3390/engproc2023029006
Riad B, El-Arkam M, Maroua K, Wiam K, Youcef Z. Design of Type 2 Fuzzy Logic Controller for FESTO Process Workstation. Engineering Proceedings. 2023; 29(1):6. https://doi.org/10.3390/engproc2023029006
Chicago/Turabian StyleRiad, Bendib, Mechhoud El-Arkam, Kassah Maroua, Kattouche Wiam, and Zennir Youcef. 2023. "Design of Type 2 Fuzzy Logic Controller for FESTO Process Workstation" Engineering Proceedings 29, no. 1: 6. https://doi.org/10.3390/engproc2023029006