
Weed Detection in Rice Fields Using UAV and Multispectral Aerial Imagery †

 , ,
, ,
Abstract
:1. Introduction
2. Unmanned Aerial Vehicle (UAV) and Weed Detection Using Multispectral Imagery
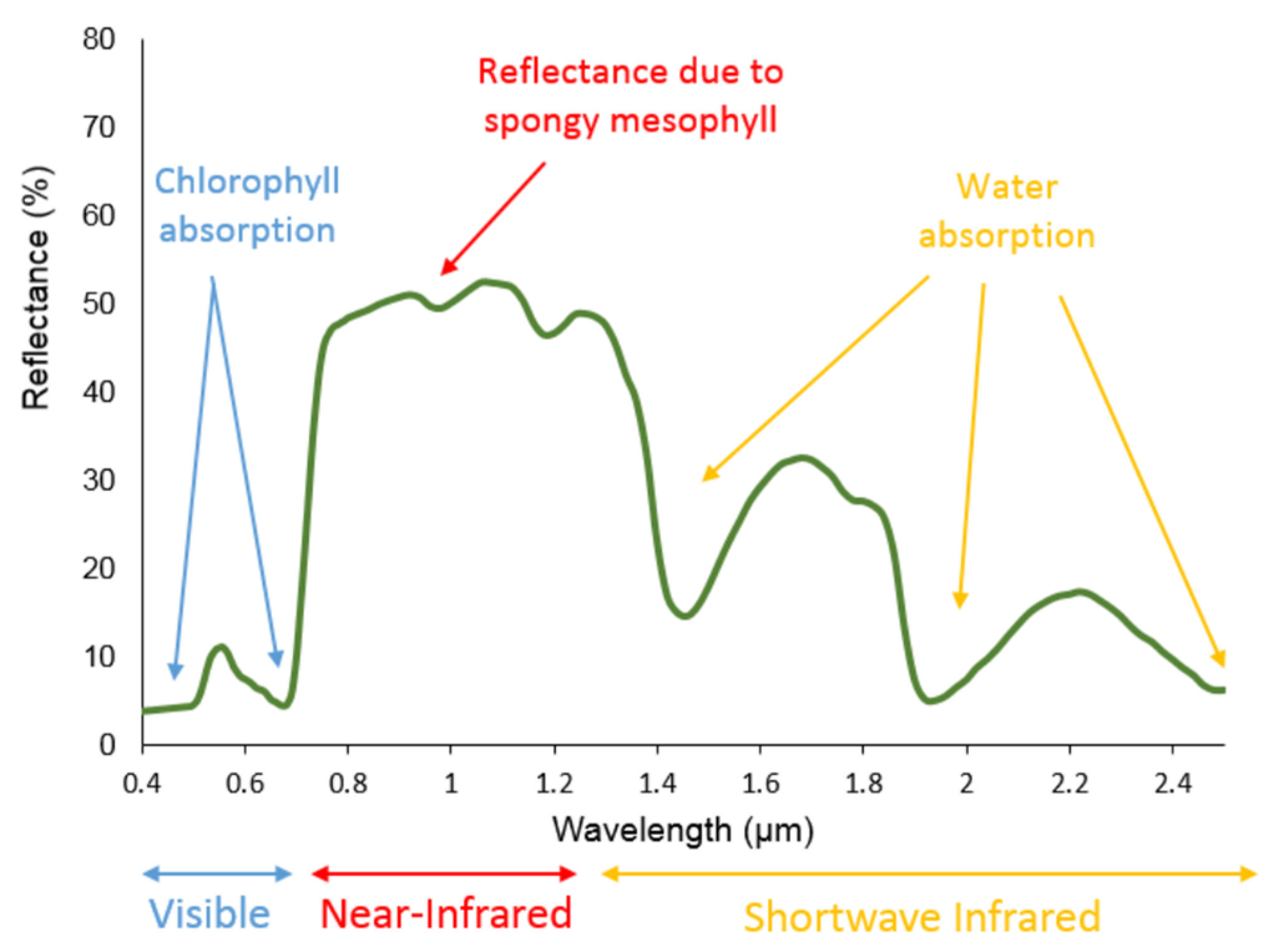
Spectral Reflectance of Vegetation and Vegetation Index
3. Materials and Methods
3.1. Data Collections
3.1.1. Experimental Design
3.1.2. Ground and Aerial Imagery Data Collection
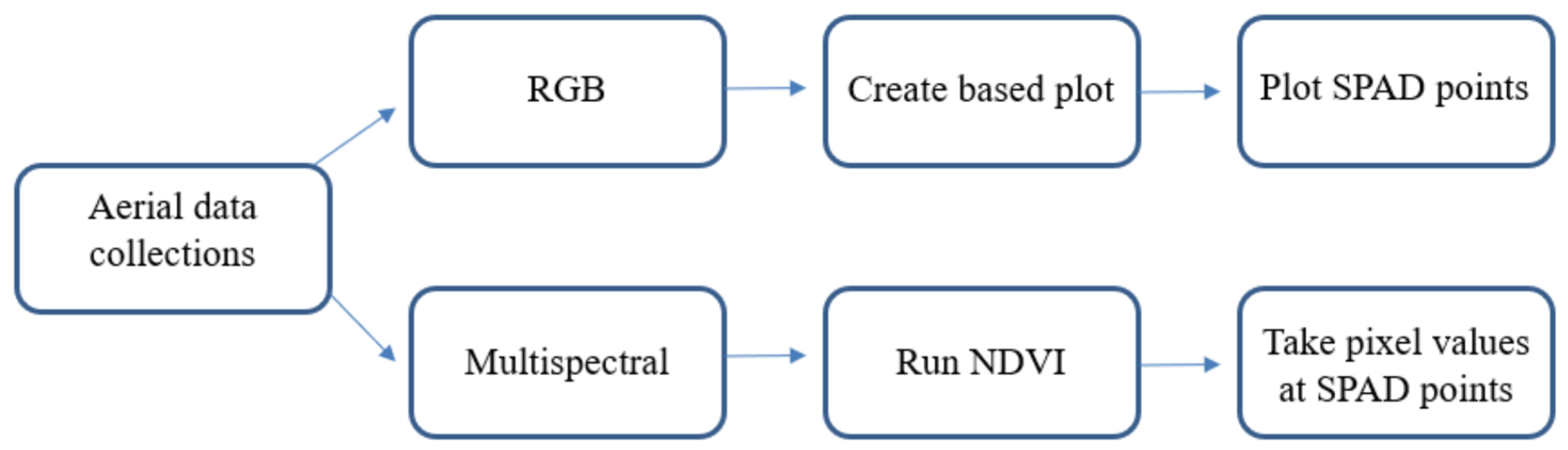
3.2. Image Processing and Analysis
4. Results and Discussion
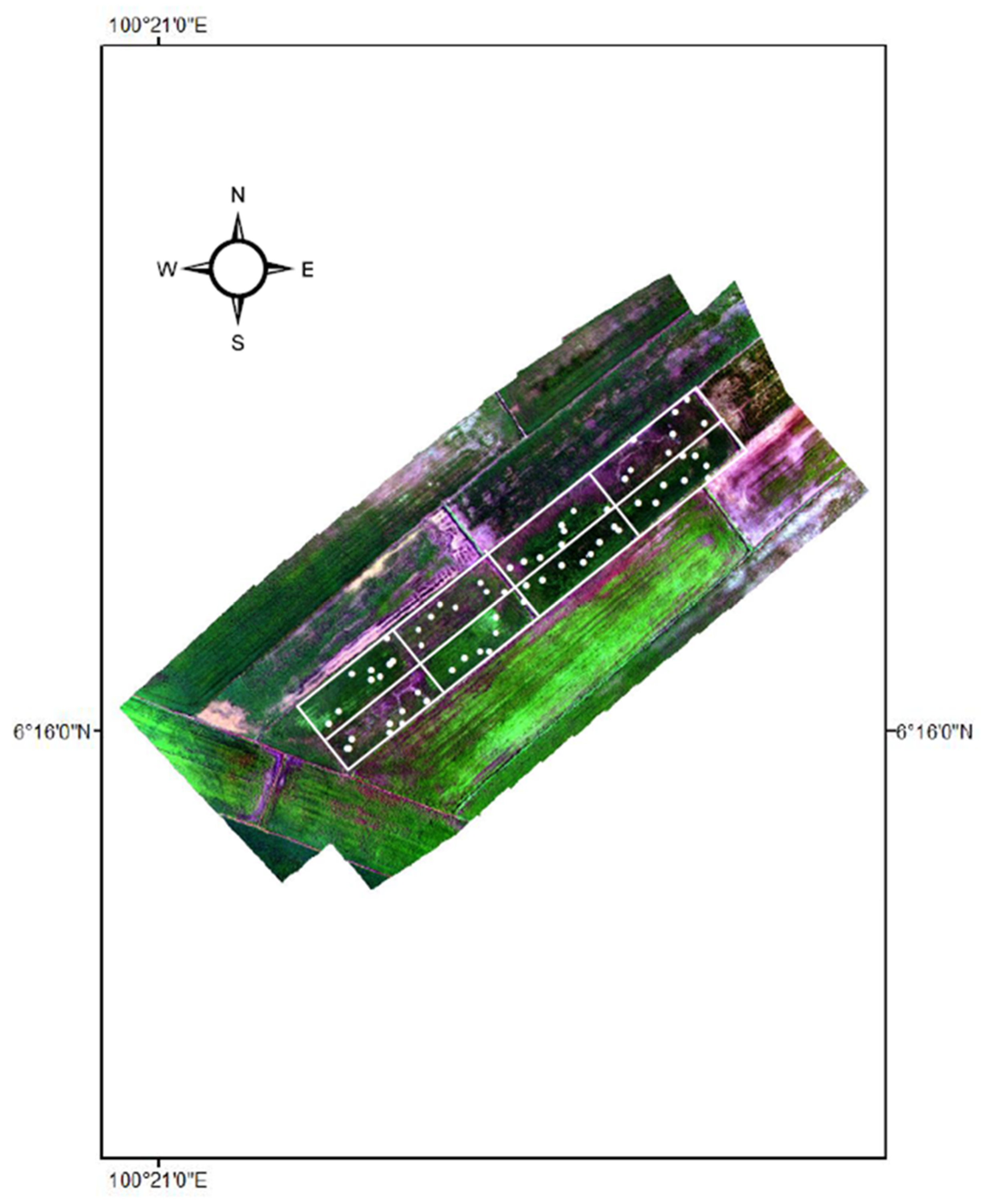
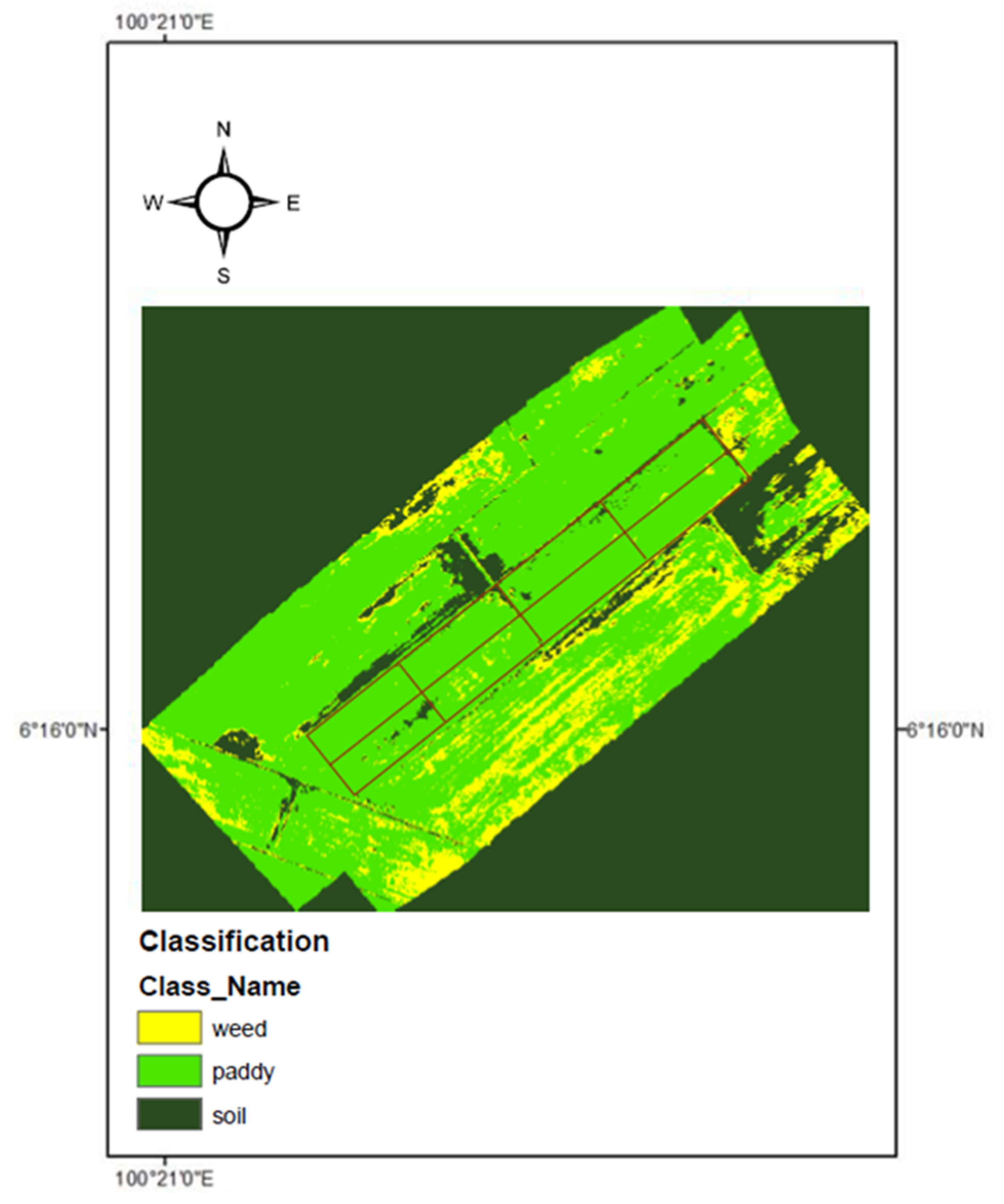
4.1. RGB Map
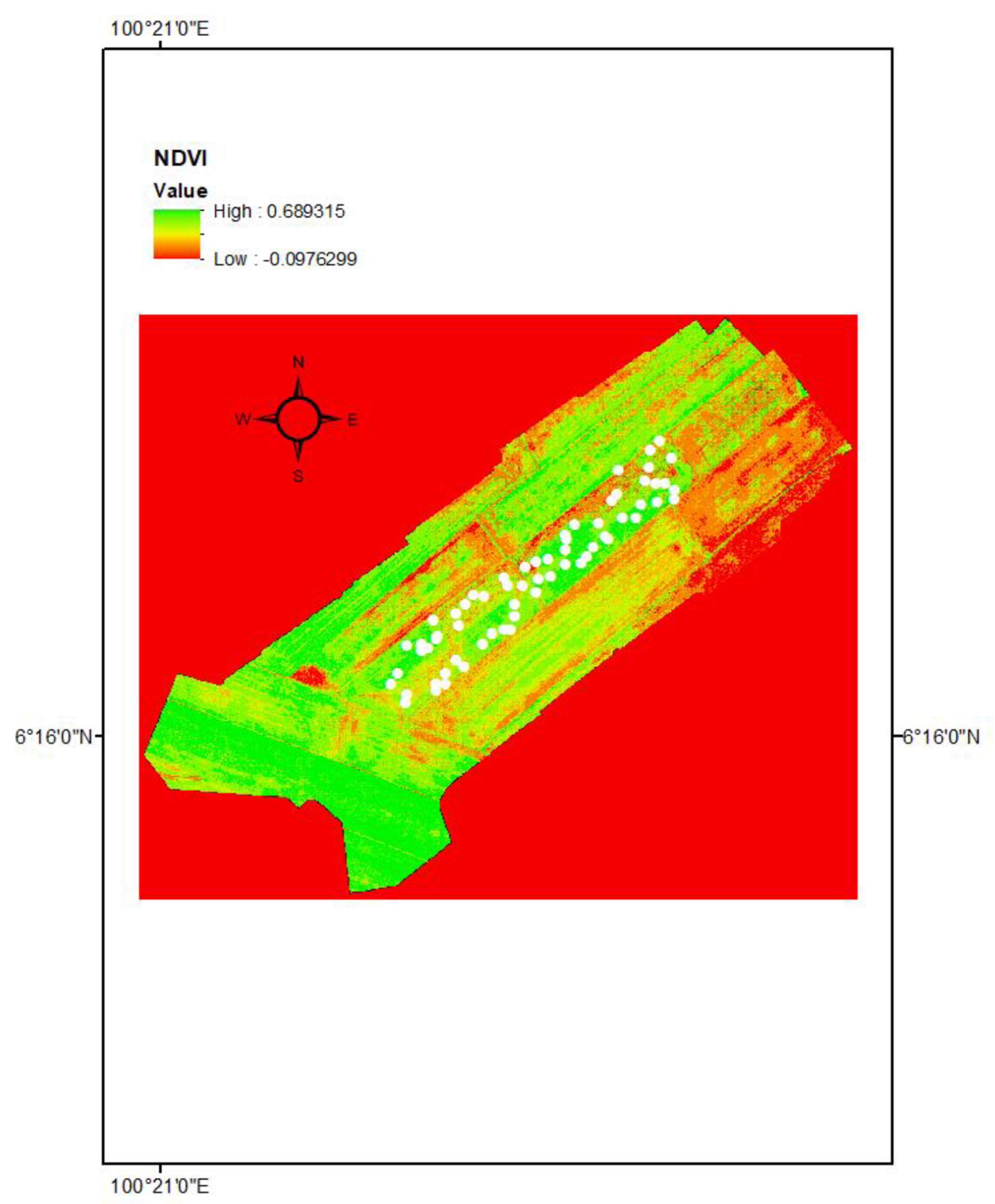
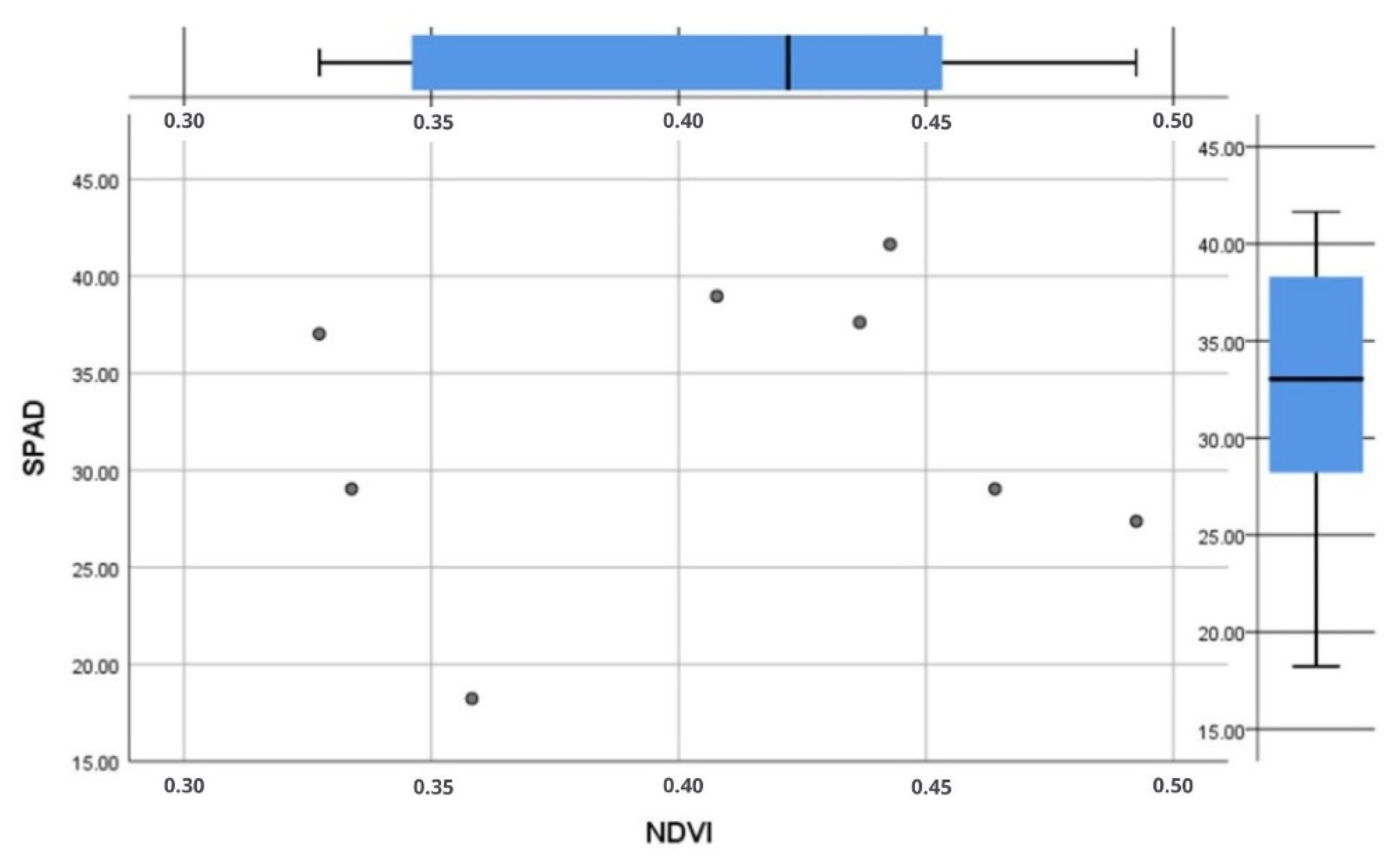
4.2. Correlation and Regression between SPAD and NDVI
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rosle, R.; Che′Ya, N.N.; Ang, Y.; Rahmat, F.; Wayayok, A.; Berahim, Z.; Omar, M.H. Weed Detection in Rice Fields Using Remote Sensing Technique: A Review. Appl. Sci. 2021, 11, 10701. [Google Scholar] [CrossRef]
- Kawamura, K.; Asai, H.; Yasuda, T.; Soisouvanh, P.; Phongchanmixay, S. Discriminating crops/weeds in an upland rice field from UAV images with the SLIC-RF algorithm. Plant Prod. Sci. 2020, 24, 198–215. [Google Scholar] [CrossRef]
- Dos Santos Ferreira, A.; Freitas, D.M.; da Silva, G.G.; Pistori, H.; Folhes, M.T. Weed detection in soybean crops using ConvNets. Comput. Electron. Agric. 2017, 143, 314–324. [Google Scholar] [CrossRef]
- Jabran, K.; Uludag, A.; Chauhan, B.S. Sustainable Weed Control in Rice. In Weed Control: Sustainability, Hazards, and Risks in Cropping Systems Worldwide; CRC Press: Boca Raton, FL, USA, 2018; pp. 276–287. [Google Scholar] [CrossRef]
- Roslin, N.A.; Che′Ya, N.N.; Sulaiman, N.; Alahyadi, L.A.N.; Ismail, M.R. Mobile Application Development for Spectral Signature of Weed Species in Rice Farming. Pertanika J. Sci. Technol. 2021, 29, 2241–2259. [Google Scholar] [CrossRef]
- Dilipkumar, M.; Chuah, T.S.; Goh, S.S.; Sahid, I. Weed management issues, challenges, and opportunities in Malaysia. Crop Prot. 2020, 134, 104347. [Google Scholar] [CrossRef]
- Giacomo, R.; David, G. Unmanned Aerial Systems (UAS) in Agriculture: Regulations and Good Practices. In E-Agriculture in Action: Drones for Agriculture; FAO: Roma, Italy, 2017. [Google Scholar]
- Roslin, N.A.; Che′Ya, N.N.; Rosle, R.; Ismail, M.R. Smartphone Application Development for Rice Field Management Through Aerial Imagery and Normalised Difference Vegetation Index (NDVI) Analysis. Pertanika J. Sci. Technol. 2021, 29, 2. [Google Scholar] [CrossRef]
- Sulaiman, N.; Che′Ya, N.N.; Mohd Roslim, M.H.; Juraimi, A.S.; Mohd Noor, N.; Fazlil Ilahi, W.F. The Application of Hyperspectral Remote Sensing Imagery (HRSI) for Weed Detection Analysis in Rice Fields: A Review. Appl. Sci. 2022, 12, 2570. [Google Scholar] [CrossRef]
- De Castro, A.I.; Torres-Sánchez, J.; Peña, J.M.; Jiménez-Brenes, F.M.; Csillik, O.; López-Granados, F. An Automatic Random Forest-OBIA Algorithm for Early Weed Mapping between and within Crop Rows Using UAV Imagery. Remote Sens. 2018, 10, 285. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Cano, E.; Horton, R.; Liljegren, C.; Bulanon, D.M. Comparison of Small Unmanned Aerial Vehicles Performance Using Image Processing. J. Imaging 2017, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Che′Ya, N.N. Site-Specific Weed Management Using Remote Sensing. Ph.D. Thesis, University of Queensland, St Lucia, Australia, 2016. [Google Scholar]
- Gago, J.; Douthe, C.; Coopman, R.; Gallego, P.P.; Ribas-Carbo, M.; Flexas, J.; Escalona, J.; Medrano, H. UAVs challenge to assess water stress for sustainable agriculture. Agric. Water Manag. 2015, 153, 9–19. [Google Scholar] [CrossRef]
- Osorio, K.; Puerto, A.; Pedraza, C.; Jamaica, D.; Rodríguez, L. A Deep Learning Approach for Weed Detection in Lettuce Crops Using Multispectral Images. AgriEngineering 2020, 2, 471–488. [Google Scholar] [CrossRef]
- Liu, T.; Li, R.; Zhong, X.; Jiang, M.; Jin, X.; Zhou, P.; Liu, S.; Sun, C.; Guo, W. Estimates of rice lodging using indices derived from UAV visible and thermal infrared images. Agric. For. Meteorol. 2018, 252, 144–154. [Google Scholar] [CrossRef]
- Roslim, M.H.M.; Juraimi, A.S.; Che′Ya, N.N.; Sulaiman, N.; Manaf, M.N.H.A.; Ramli, Z.; Motmainna, M. Using remote sensing and an unmanned aerial system for weed management in agricultural crops: A review. Agronomy 2021, 11, 1809. [Google Scholar] [CrossRef]
- Barrero, O.; Perdomo, S.A. RGB and multispectral UAV image fusion for Gramineae weed detection in rice fields. Precis. Agric. 2018, 19, 809–822. [Google Scholar] [CrossRef]
- Gibson, K.D.; Dirks, R.; Medlin, C.R.; Johnston, L. Detection of Weed Species in Soybean Using Multispectral Digital Images. Weed Technol. 2004, 18, 742–749. [Google Scholar] [CrossRef]
- Kamal, M.; Ningam, M.U.L.; Alqorina, F. The Effect of Field Spectral Reflectance Measurement Distance to the Spectral Reflectance of Rhizophora stylosa. IOP Conf. Ser. Earth Environ. Sci. 2017, 98, 012059. [Google Scholar] [CrossRef]
- Rosle, R.; Che′Ya, N.N.; Roslin, N.A.; Halip, R.M.; Ismail, M.R. Monitoring early stage of rice crops growth using normalized difference vegetation index generated from UAV. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2019; Volume 355, p. 12066. [Google Scholar]
- Mahlein, A.-K. Precision agriculture and plant phenotyping are information- and technology-based domains with specific demands and challenges for. Plant Dis. 2016, 100, 241–251. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reinecke, M.; Prinsloo, T. The influence of drone monitoring on crop health and harvest size. In 2017 1st International Conference on Next Generation Computing Applications (NextComp); IEEE: Piscataway, NJ, USA, 2017; pp. 5–10. [Google Scholar]
- López-Granados, F.; Torres-Sánchez, J.; Serrano-Pérez, A.; De Castro, A.I.; Mesas-Carrascosa, F.-J.; Peña, J.M. Early season weed mapping in sunflower using UAV technology: Variability of herbicide treatment maps against weed thresholds. Precis. Agric. 2016, 17, 183–199. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of UAV | Advantages | Disadvantages | Sources |
|---|---|---|---|
| Fixed-wing |
|
| [1,14] |
| Rotary wing |
|
|
| SPAD | SPAD | ||
|---|---|---|---|
| SPAD | Pearson Correlation | 1 | 0.129 |
| Sig. (2-tailed) | 0.760 | ||
| N | 8 | 8 | |
| NDVI | Pearson Correlation | 1 | 0.129 |
| Sig. (2-tailed) | 0.760 | ||
| N | 8 | 8 |
| Relationship | Regression Equation | R-Square |
|---|---|---|
| SPAD and NDVI values | y = 18.08x + 25.001 | 0.0199 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosle, R.; Sulaiman, N.; Che′Ya, N.N.; Radzi, M.F.M.; Omar, M.H.; Berahim, Z.; Ilahi, W.F.F.; Shah, J.A.; Ismail, M.R. Weed Detection in Rice Fields Using UAV and Multispectral Aerial Imagery. Chem. Proc. 2022, 10, 44. https://doi.org/10.3390/IOCAG2022-12519
Rosle R, Sulaiman N, Che′Ya NN, Radzi MFM, Omar MH, Berahim Z, Ilahi WFF, Shah JA, Ismail MR. Weed Detection in Rice Fields Using UAV and Multispectral Aerial Imagery. Chemistry Proceedings. 2022; 10(1):44. https://doi.org/10.3390/IOCAG2022-12519
Chicago/Turabian StyleRosle, Rhushalshafira, Nursyazyla Sulaiman, Nik Norasma Che′Ya, Mohd Firdaus Mohd Radzi, Mohamad Husni Omar, Zulkarami Berahim, Wan Fazilah Fazlil Ilahi, Jasmin Arif Shah, and Mohd Razi Ismail. 2022. "Weed Detection in Rice Fields Using UAV and Multispectral Aerial Imagery" Chemistry Proceedings 10, no. 1: 44. https://doi.org/10.3390/IOCAG2022-12519