
CFD Simulations of Hydrogen Tank Fuelling: Sensitivity to Turbulence Model and Grid Resolution


Abstract
:1. Introduction
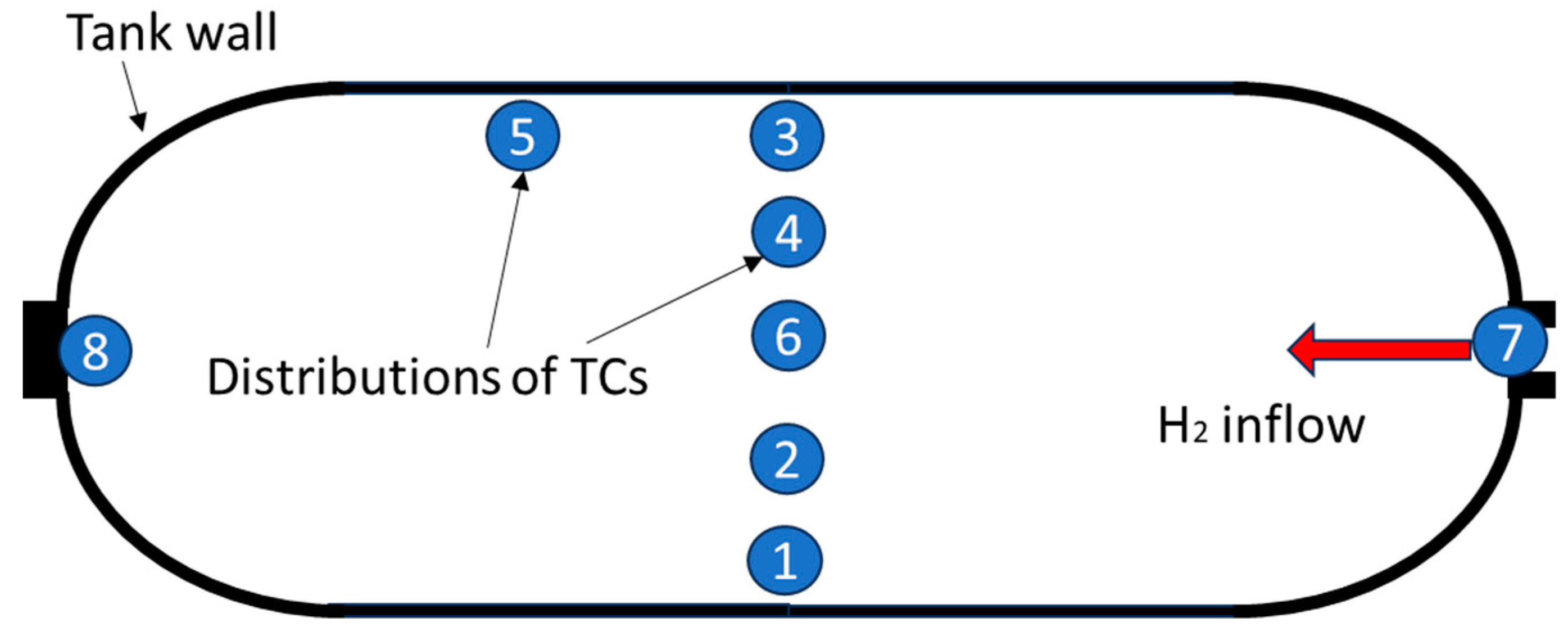
2. Validation Experiment
3. Numerical Model
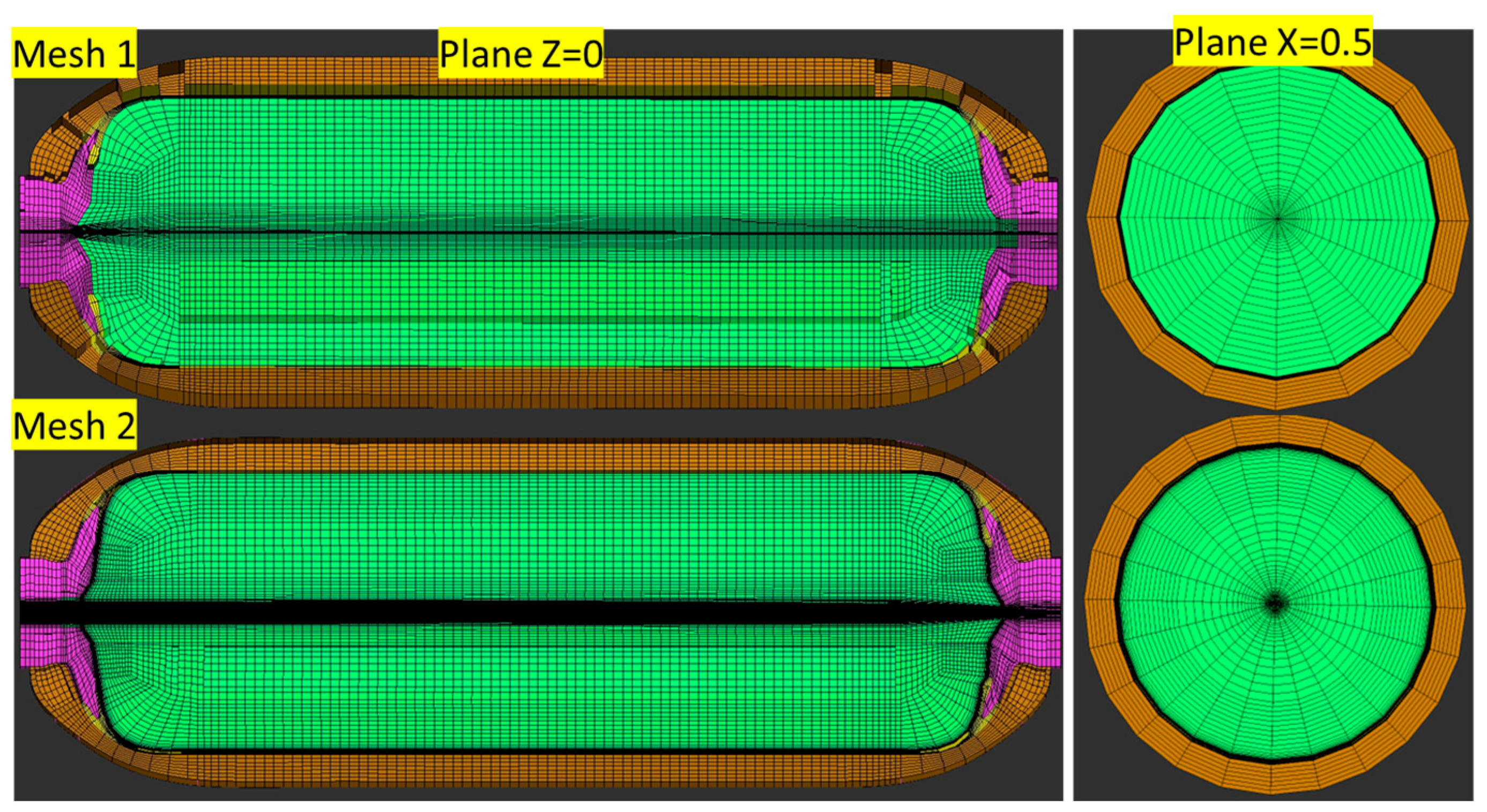
3.1. Calculation Domain and Numerical Mesh
3.2. Governing Equations
3.3. k-ε Model with a Modified Coefficient [37]
3.4. Reynolds Stress Model (RSM)
3.5. Large Eddy Simulation (LES)
3.6. Detached Eddy Simulation (DES) [42]
3.7. Scale-Adaptive Simulation (SAS) [28]
3.8. Initial and Boundary Conditions
3.9. Numerical Details
4. Results and Discussion
4.1. Simulation Speed
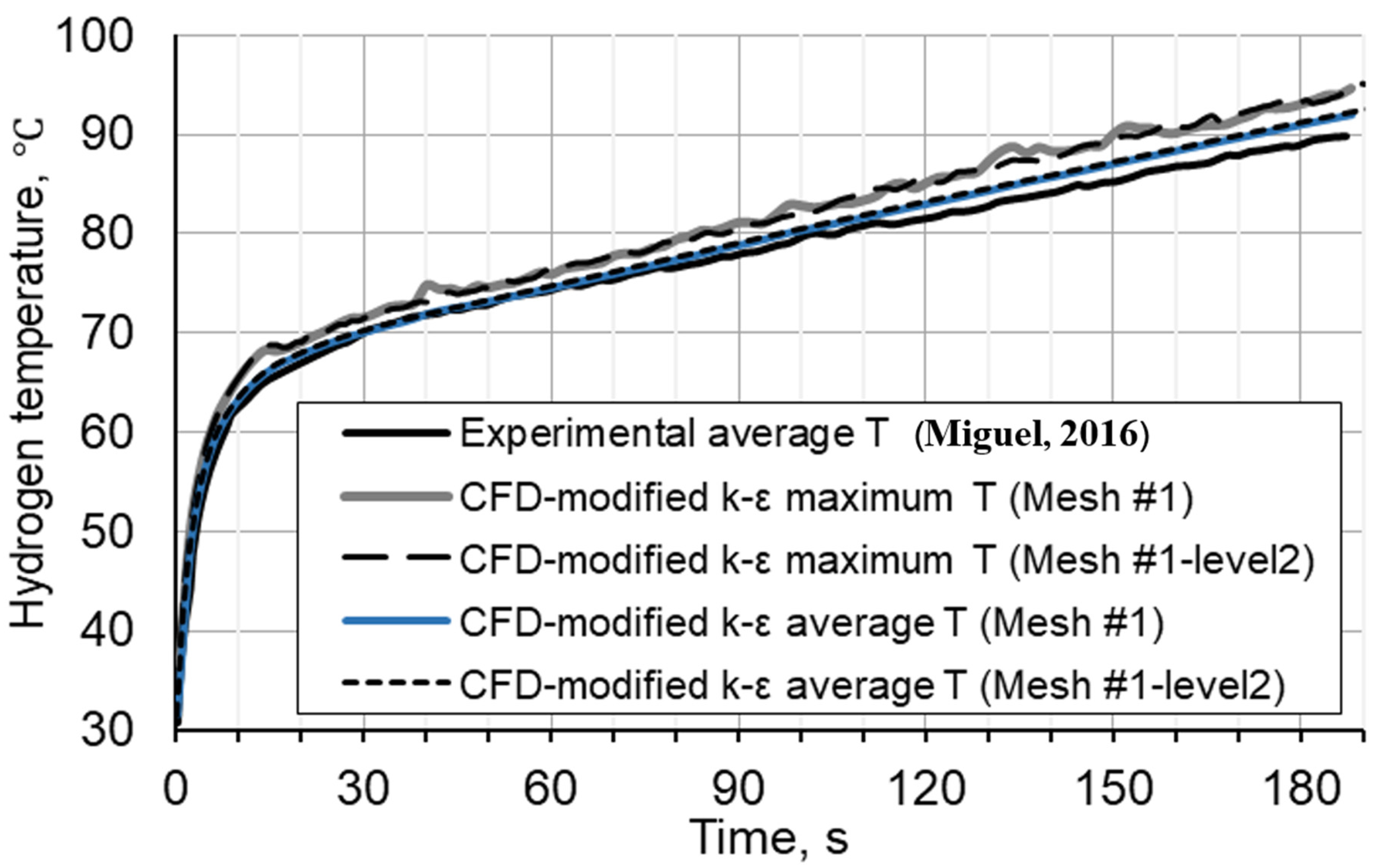
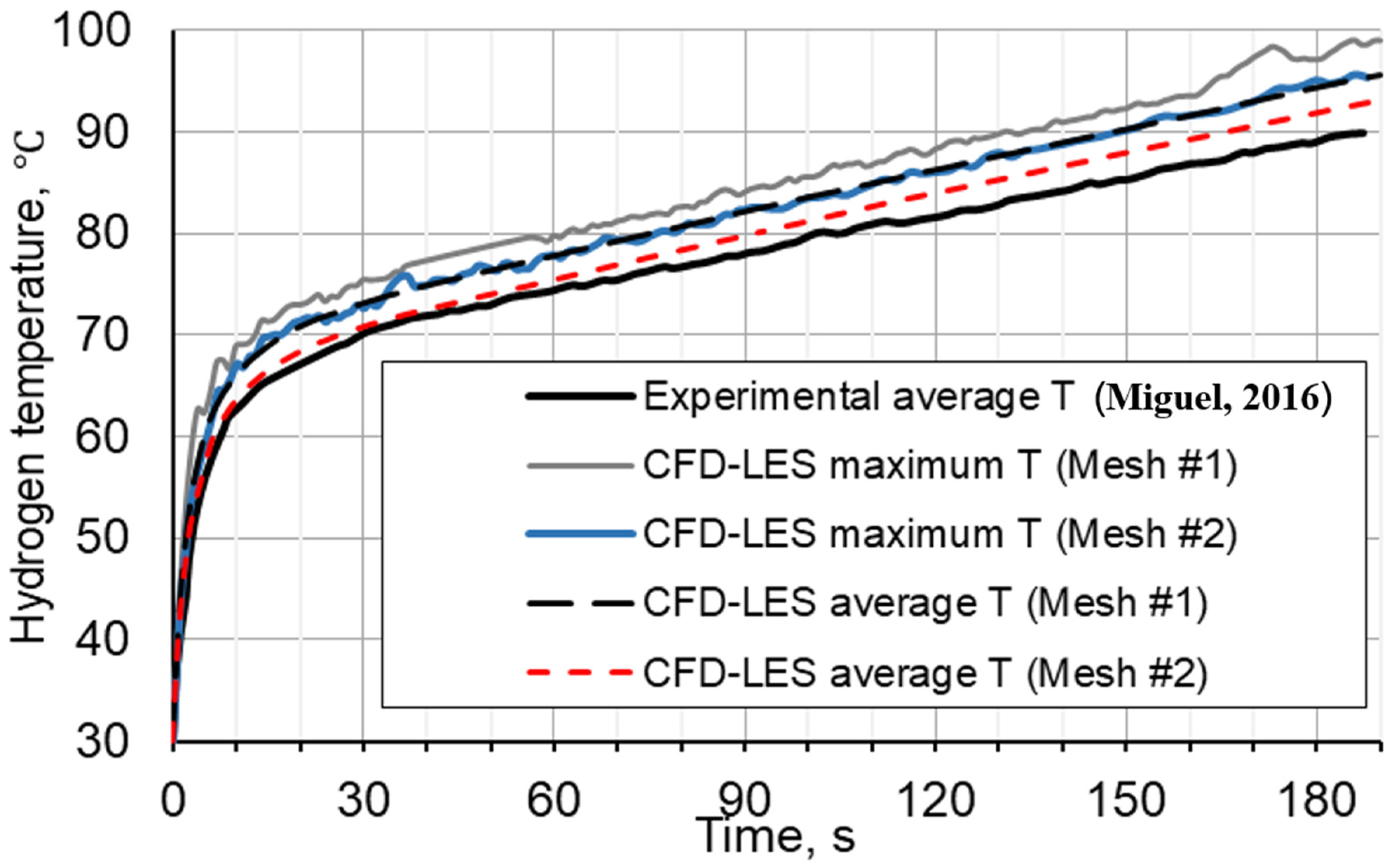
4.2. Grid Sensitivity
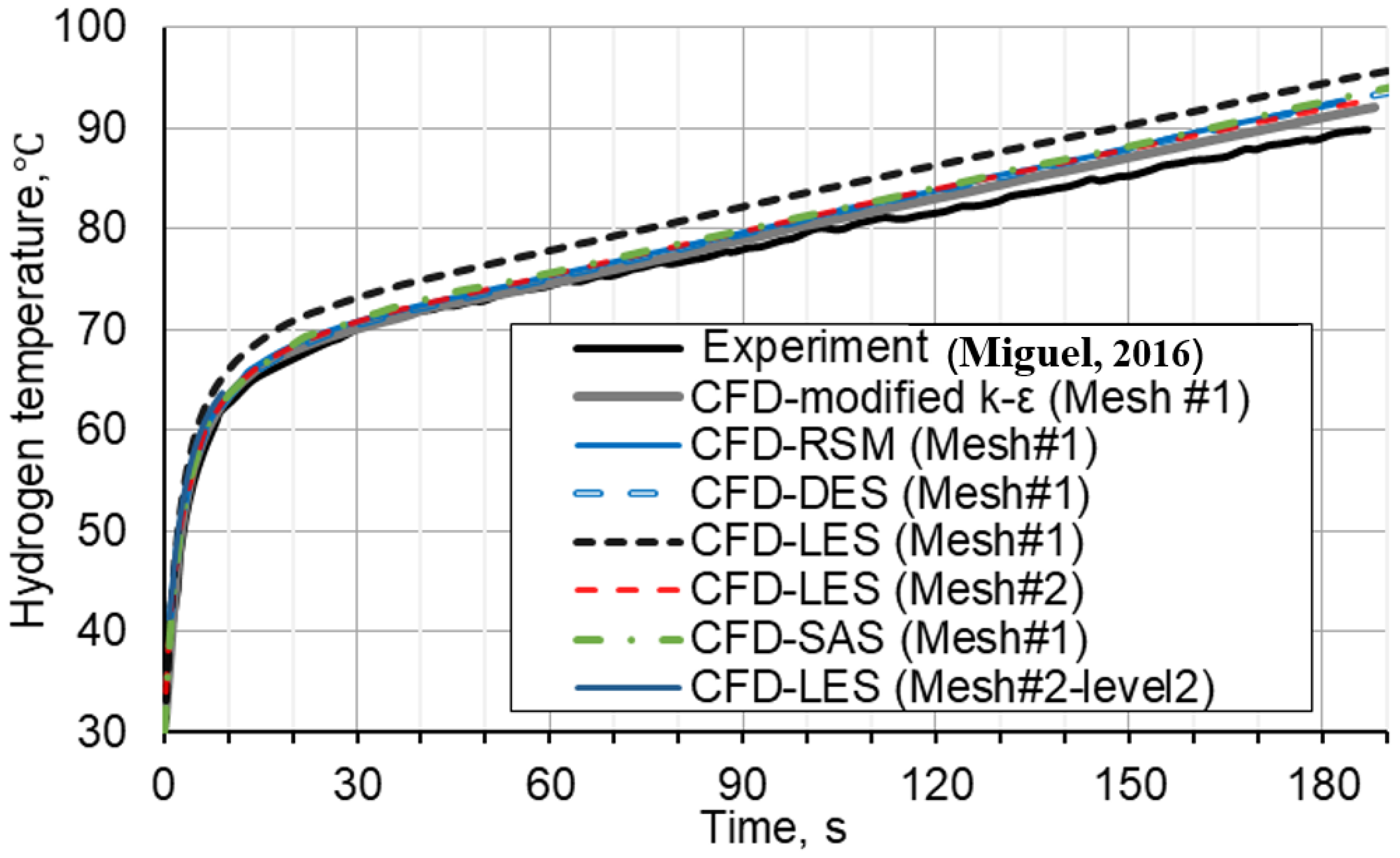
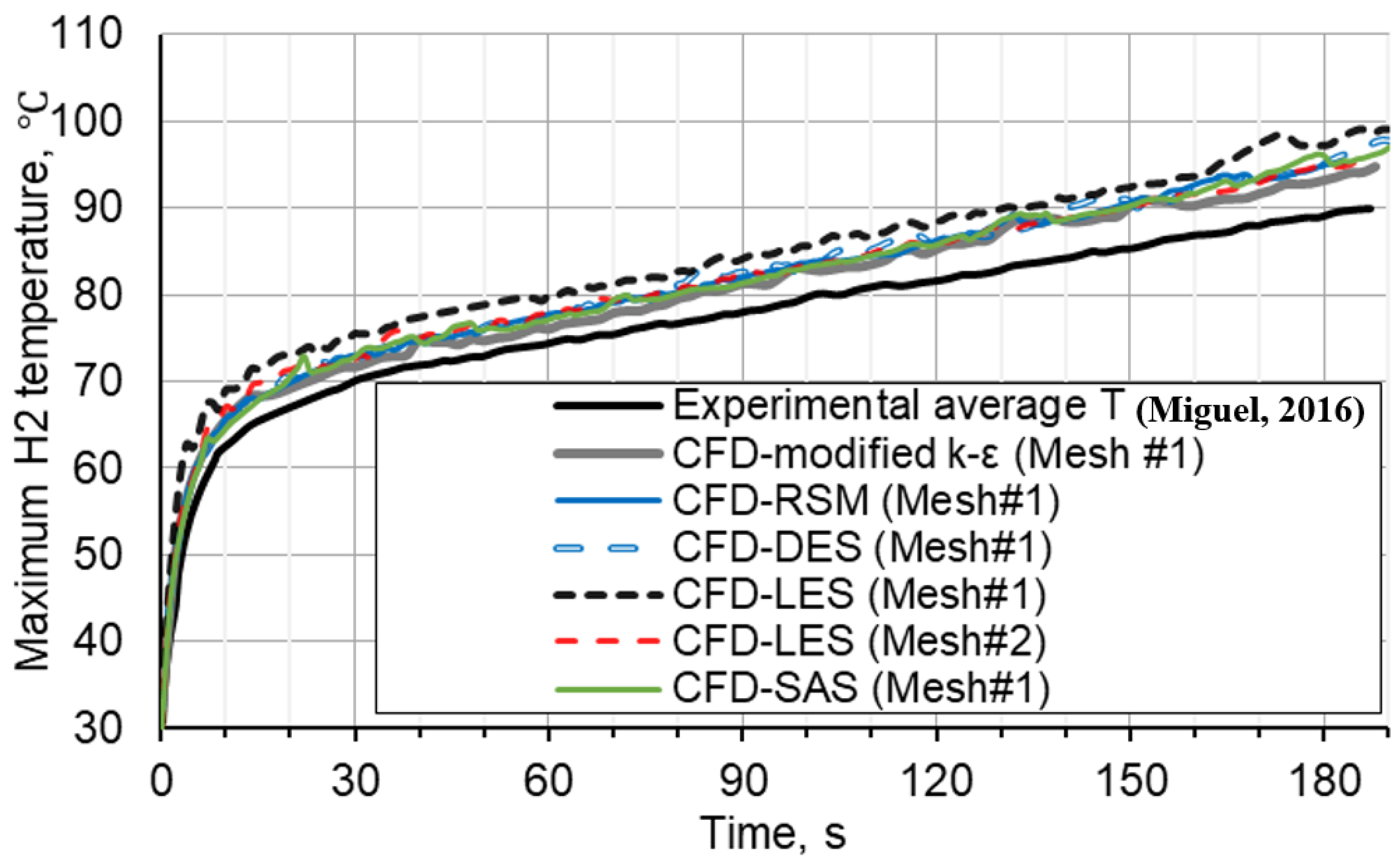
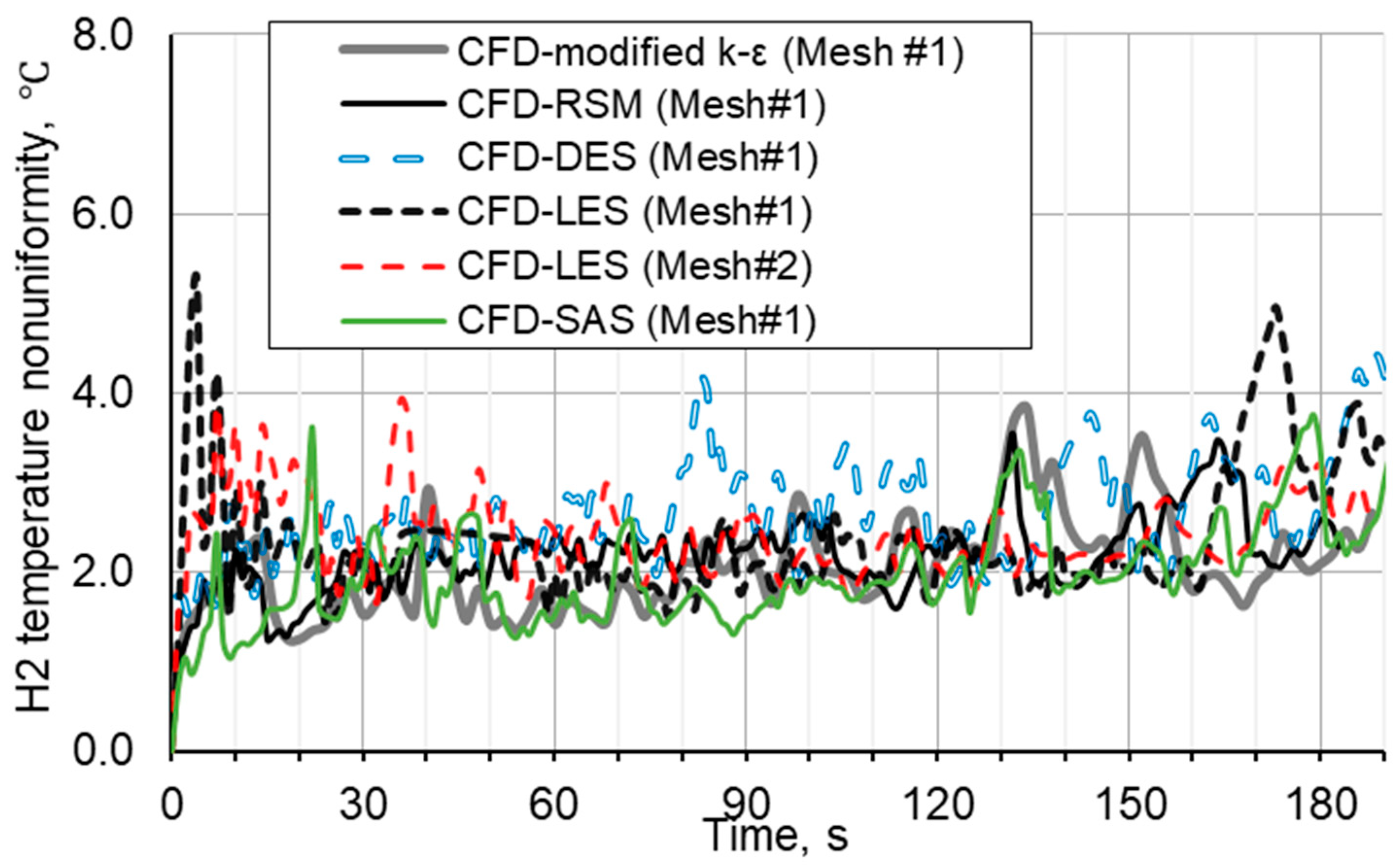
4.3. Hydrogen Temperature inside the Tank
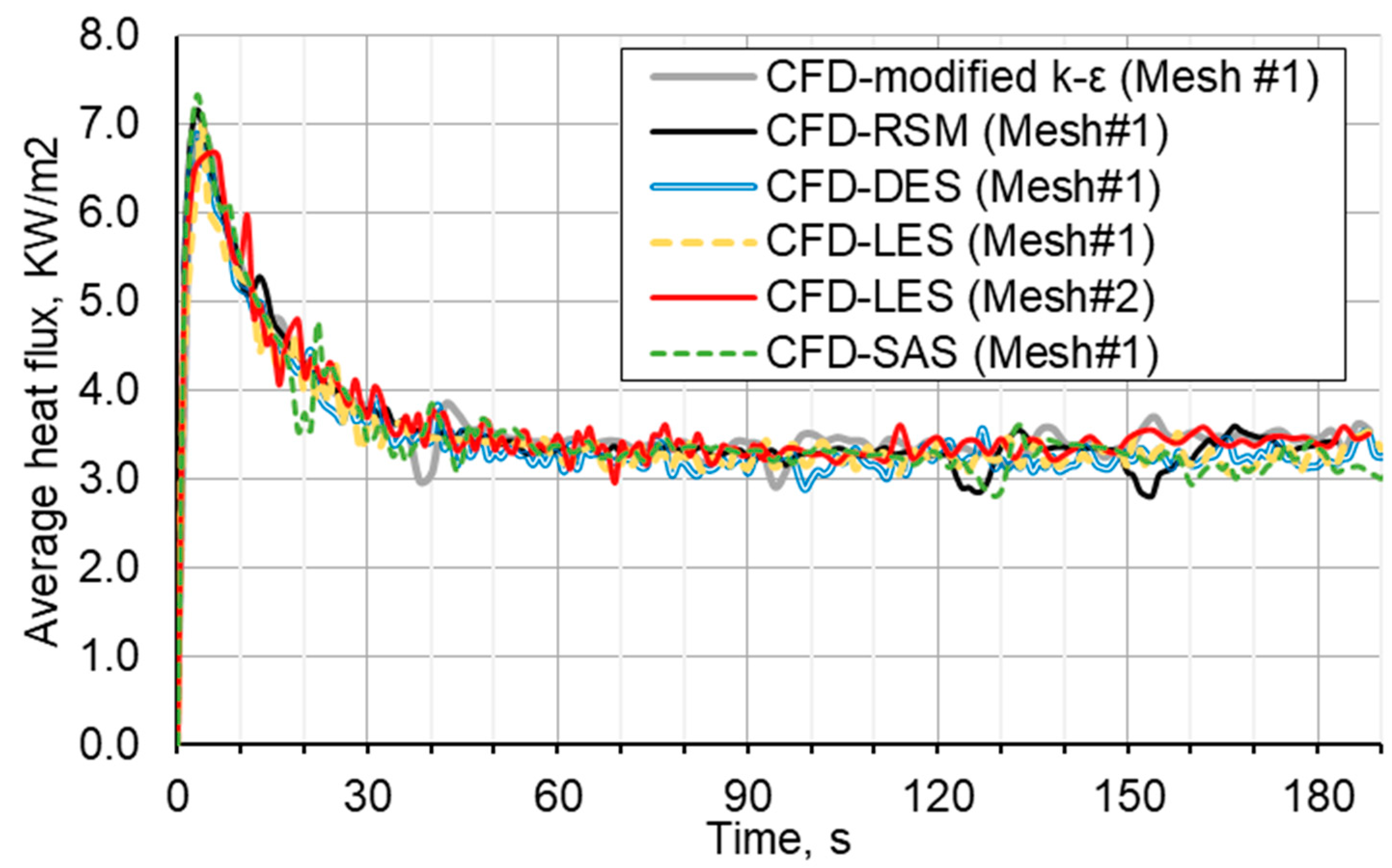
4.4. Heat Flux to the Tank
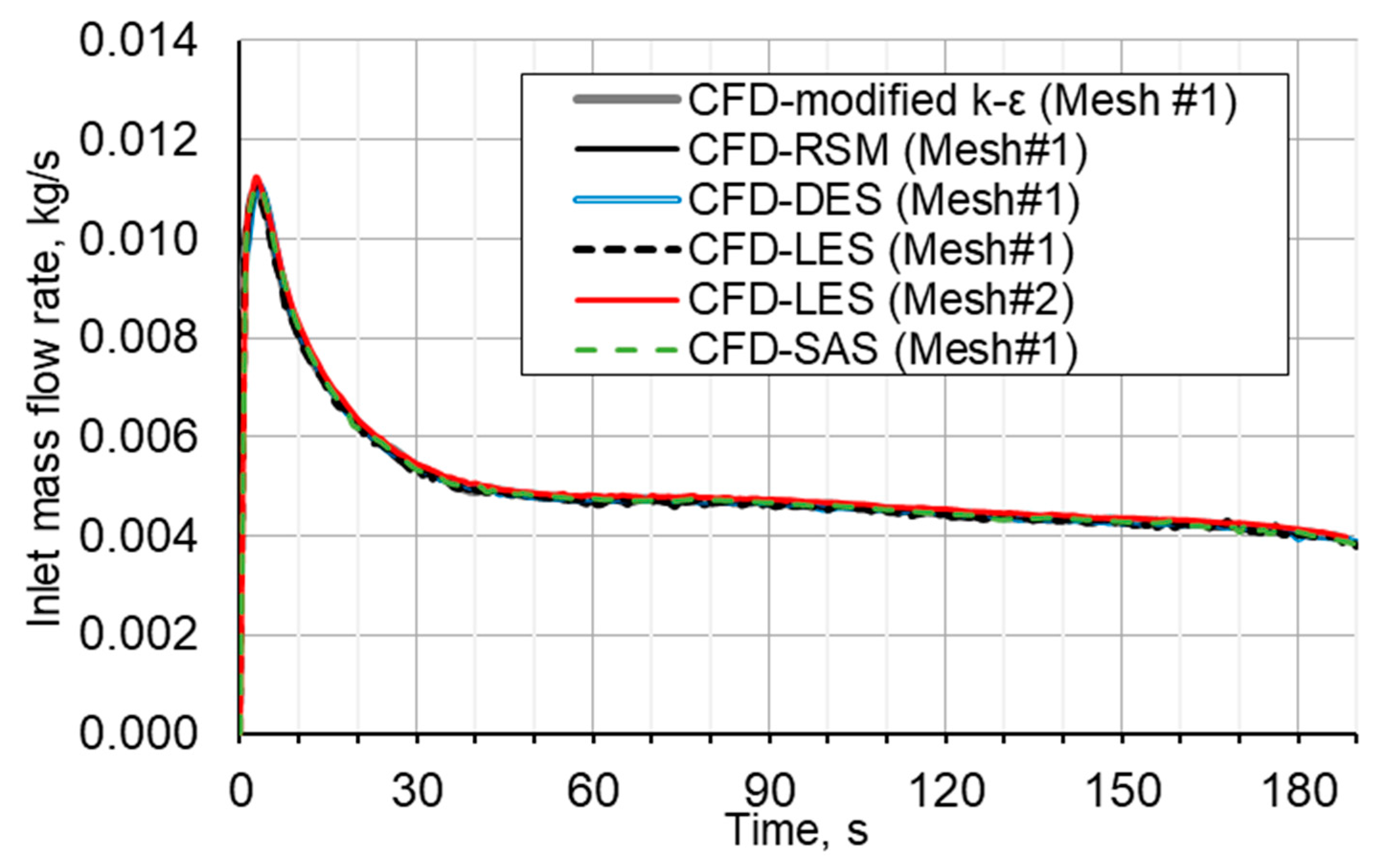
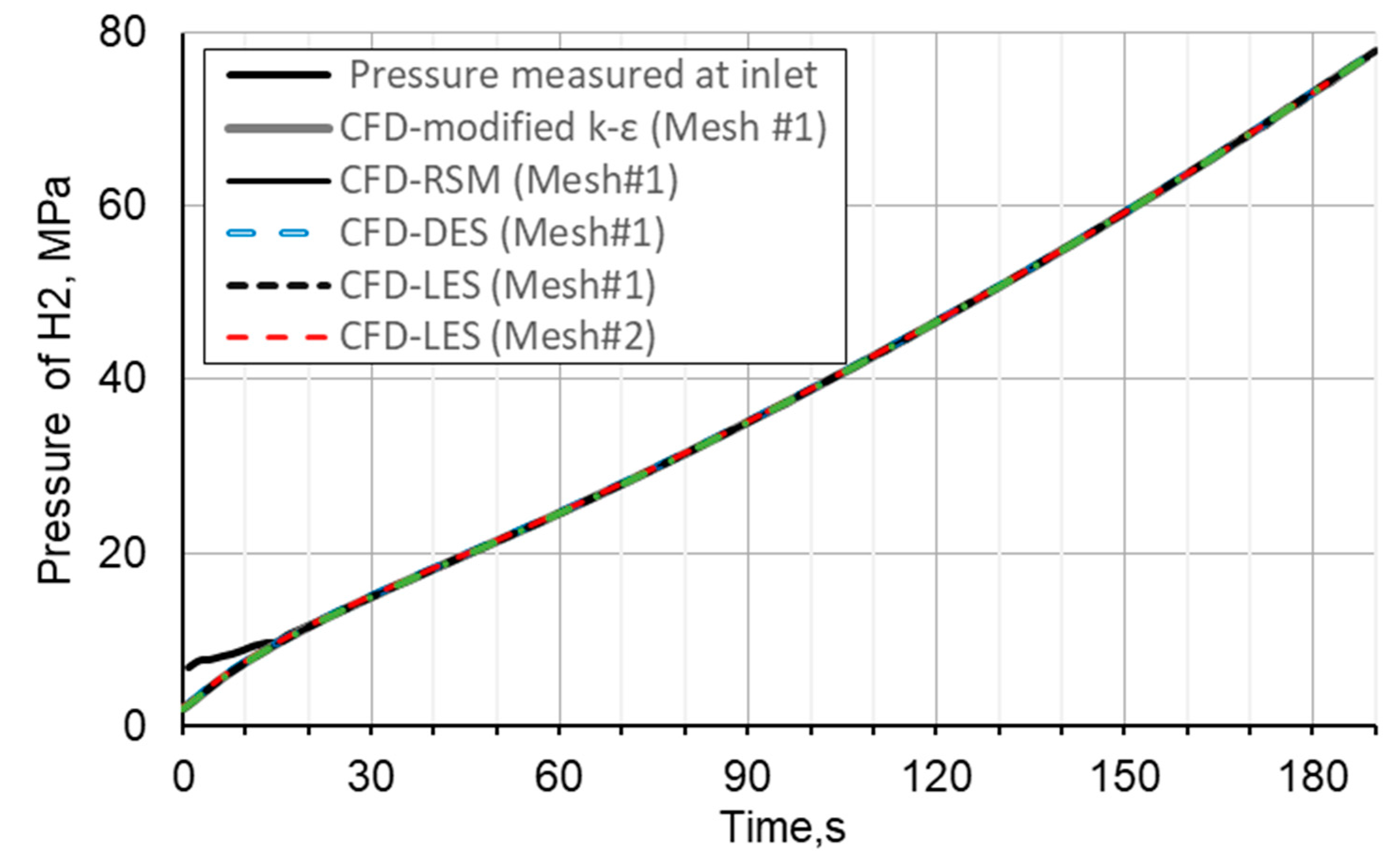
4.5. Pressure in the Tank and the Inlet Mass Flow Rate
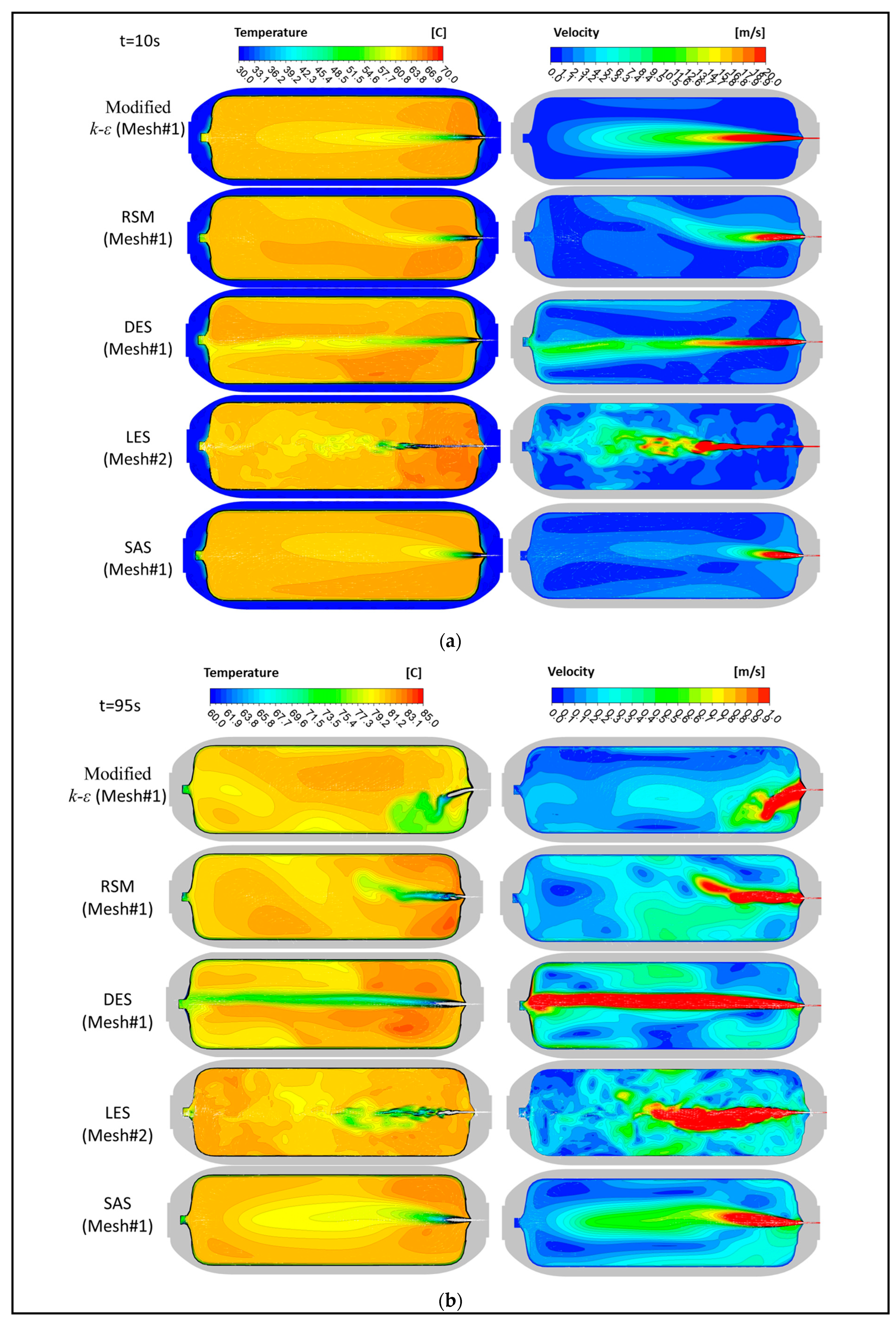
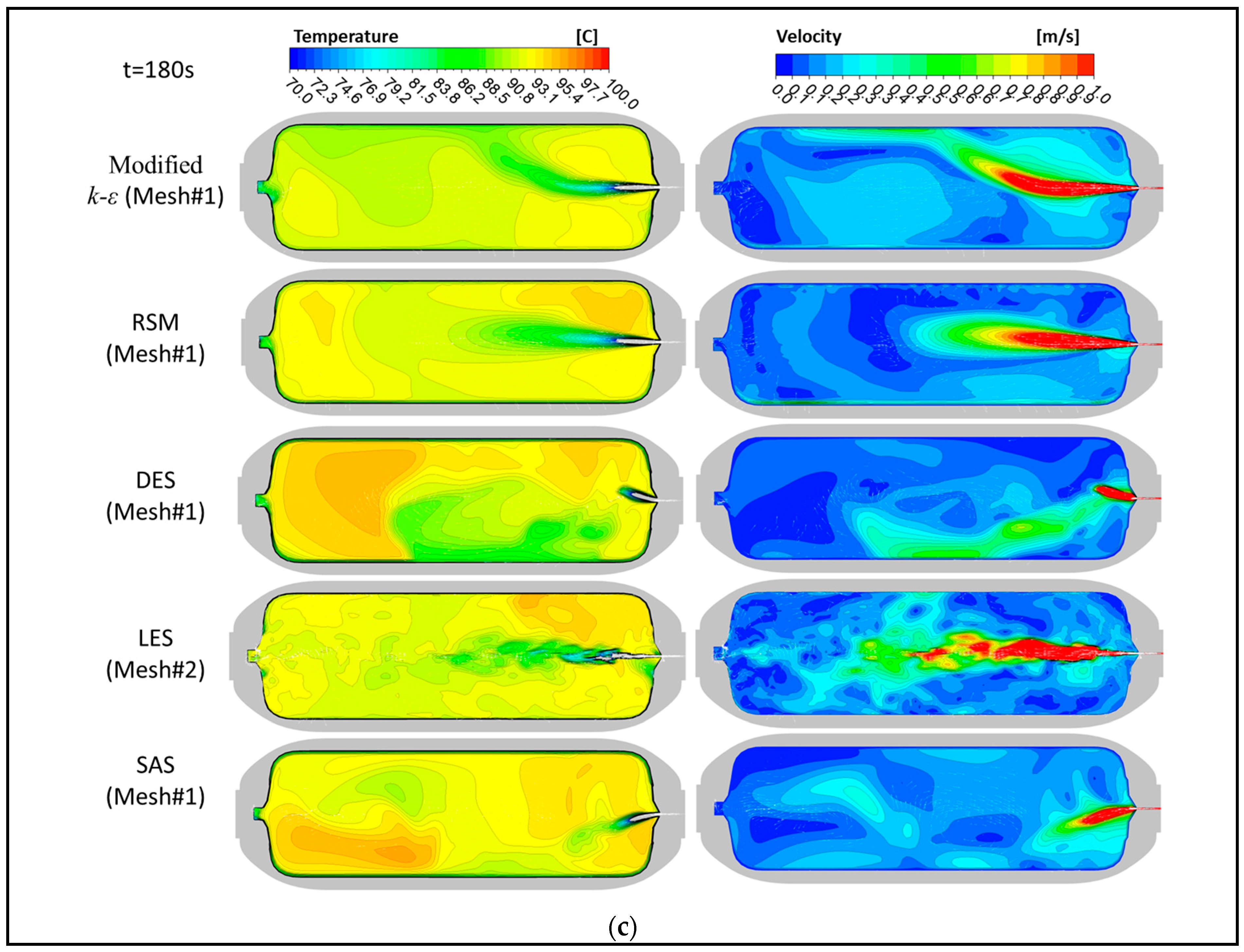
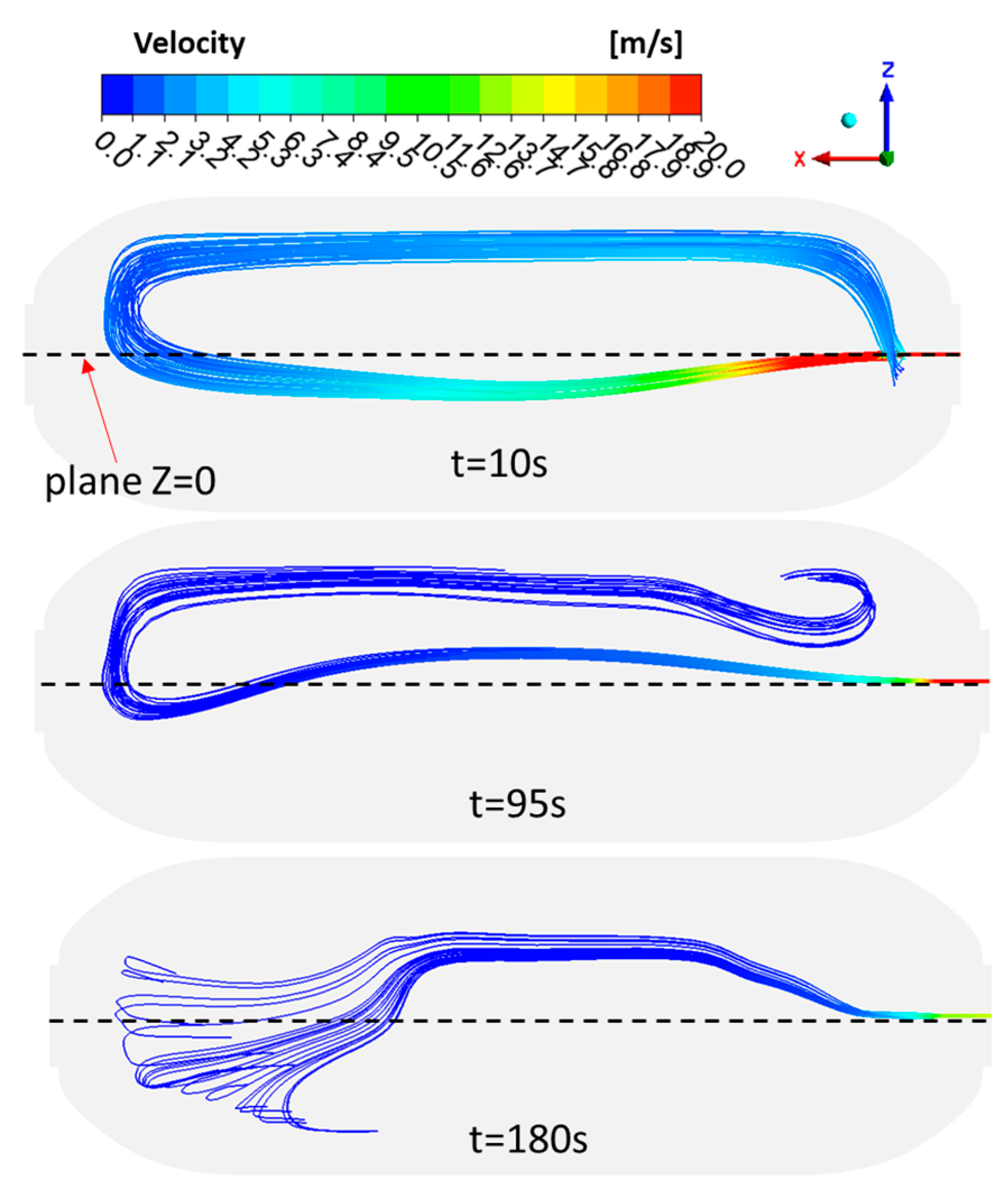
4.6. Velocity and Temperature Distributions inside the Tank
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| specific heat of the gas at constant pressure, J/kg/K | |
| , the coefficient in the k-ε model, [-] | |
| distance from the closest wall, m | |
| energy of the gas, J/kg | |
| gravitational acceleration vector, m/s2 | |
| component of the gravitational vector, m/s2 | |
| sensible enthalpy, kJ/kg | |
| generation of turbulence kinetic energy due to buoyancy, , kg/m/s3 | |
| generation of turbulence kinetic energy due to mean velocity gradients, , kg/m/s3 | |
| turbulence kinetic energy, m2/s2 | |
| molecular conductivity of hydrogen gas, W/m/K | |
| enhanced heat transfer by turbulence, W/m/K | |
| static pressure, Pa | |
| turbulent Prandtl number, [-] | |
| characteristic gas constant, J/kg/K | |
| modulus of the mean rate-of-strain tensor, s−1 | |
| time, s | |
| temperature, °C or K | |
| contribution of the fluctuating dilatation to the overall dissipation rate, , kg/m/s3 | |
| velocity, m/s | |
| component of the flow velocity parallel to the gravitational vector, m/s | |
| component of the flow velocity perpendicular to the gravitational vector, m/s | |
| volume of the grid cell, m3 | |
| Greek symbols | |
| thermal expansion coefficient, K−1 | |
| turbulence dissipation rate, m2/s3 | |
| Φ | arbitrary field variable |
| ratio of specific heat at constant pressure to the specific heat at constant volume, [-] | |
| density of hydrogen gas, kg/m3 | |
| dynamic viscosity, kg/m/s | |
| turbulent viscosity, kg/m/s | |
| Kronecker delta, equals to1 if i = j, 0 if i ≠ j | |
| stress tensor, kg/m/s2 | |
| Constants | |
| , , , , in the k-ε model. | |
| Superscript | |
| time-averaged quantity (RANS) or filtered quantity (LES) | |
| Favre-averaged quantity (RANS) or mass-weighted filtered quantity (LES) | |
| fluctuating component for time average or filtered quantity | |
| Subscript | |
| gas | |
| unit vectors in x, y, and z directions | |
| turbulent | |
References
- Zheng, J.; Liu, X.; Xu, P.; Liu, P.; Zhao, Y.; Yang, J. Development of high pressure gaseous hydrogen storage technologies. Int. J. Hydrogen Energy 2012, 37, 1048–1057. [Google Scholar] [CrossRef]
- Gonin, R.; Horgue, P.; Guibert, R.; Fabre, D.; Bourguet, R.; Ammouri, F.; Vyazmina, E. A computational fluid dynamic study of the filling of a gaseous hydrogen tank under two contrasted scenarios. Int. J. Hydrogen Energy 2022, 47, 23278–23292. [Google Scholar] [CrossRef]
- Wang, X.; Tian, M.; Chen, X.; Xie, P.; Yang, J.; Chen, J.; Yang, W. Advances on materials design and manufacture technology of plastic liner of type IV hydrogen storage vessel. Int. J. Hydrogen Energy 2022, 47, 8382–8408. [Google Scholar] [CrossRef]
- Gebhart, T.M.; Spiller, M.; Çelik, H.; Dahlmann, R.; Hopmann, C. Experimental analyses of the spatial varying temperature development of type-IV hydrogen pressure vessels in cyclic tests considering different length to diameter ratios. Int. J. Hydrogen Energy 2023, 48, 27304–27318. [Google Scholar] [CrossRef]
- Li, M.; Bai, Y.; Zhang, C.; Song, Y.; Jiang, S.; Grouset, D.; Zhang, M. Review on the research of hydrogen storage system fast refueling in fuel cell vehicle. Int. J. Hydrogen Energy 2019, 44, 10677–10693. [Google Scholar] [CrossRef]
- Society of Automotive Engineers J2601. Fueling Protocols for Light Duty Gaseous Hydrogen Surface Vehicle; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Global Technical Regulation on Hydrogen and Fuel Cell Vehicles. Addendum 13: Global Technical Regulation No. 13. Global Registry; United Nations Economic Commission for Europe: Geneva, Switzerland, 2020. [Google Scholar]
- Molkov, V.; Dadashzadeh, M.; Makarov, D. Physical model of onboard hydrogen storage tank thermal behaviour during fuelling. Int. J. Hydrogen Energy 2019, 44, 4374–4384. [Google Scholar] [CrossRef]
- Dicken, C.J.B.; Mérida, W. Modeling the transient temperature distribution within a hydrogen cylinder during refueling. Numer. Heat Transf. Part A Appl. 2007, 53, 685–708. [Google Scholar] [CrossRef]
- Ouellette, P.; Hill, P.G. Turbulent Transient Gas Injections. J. Fluids Eng. 1999, 122, 743–752. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, G.; Liu, Y.; Zheng, J.; Chen, Y.; Zhao, L.; Guo, J.; He, Y. Numerical study on fast filling of 70 MPa type III cylinder for hydrogen vehicle. Int. J. Hydrogen Energy 2012, 37, 17517–17522. [Google Scholar] [CrossRef]
- Galassi, M.C.; Papanikolaou, E.; Heitsch, M.; Baraldi, D.; Iborra, B.A.; Moretto, P. Assessment of CFD models for hydrogen fast filling simulations. Int. J. Hydrogen Energy 2014, 39, 6252–6260. [Google Scholar] [CrossRef]
- de Miguel, N.; Acosta, B.; Baraldi, D.; Melideo, R.; Cebolla, R.O.; Moretto, P. The role of initial tank temperature on refuelling of on-board hydrogen tanks. Int. J. Hydrogen Energy 2016, 41, 8606–8615. [Google Scholar] [CrossRef]
- Zheng, J.; Guo, J.; Yang, J.; Zhao, Y.; Zhao, L.; Pan, X.; Ma, J.; Zhang, L. Experimental and numerical study on temperature rise within a 70 MPa type III cylinder during fast refueling. Int. J. Hydrogen Energy 2013, 38, 10956–10962. [Google Scholar] [CrossRef]
- Melideo, D.; Baraldi, D.; Galassi, M.C.; Cebolla, R.O.; Iborra, B.A.; Moretto, P. CFD model performance benchmark of fast filling simulations of hydrogen tanks with pre-cooling. Int. J. Hydrogen Energy 2014, 39, 4389–4395. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Heitsch, M.; Baraldi, D.; Moretto, P. Numerical investigations on the fast filling of hydrogen tanks. Int. J. Hydrogen Energy 2011, 36, 2606–2612. [Google Scholar] [CrossRef]
- Suryan, A.; Kim, H.D.; Setoguchi, T. Three dimensional numerical computations on the fast filling of a hydrogen tank under different conditions. Int. J. Hydrogen Energy 2012, 37, 7600–7611. [Google Scholar] [CrossRef]
- Melideo, D.; Baraldi, D.; Echevarria, N.D.M.; Iborra, B.A. Effects of some key-parameters on the thermal stratification in hydrogen tanks during the filling process. Int. J. Hydrogen Energy 2019, 44, 13569–13582. [Google Scholar] [CrossRef]
- Bourgeois, T.; Ammouri, F.; Baraldi, D.; Moretto, P. The temperature evolution in compressed gas filling processes: A review. Int. J. Hydrogen Energy 2018, 43, 2268–2292. [Google Scholar] [CrossRef]
- Spalart, P.; Allmaras, S. A one-equation turbulence model for aerodynamic flows. In Proceedings of the 30th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 1992; p. 439. [Google Scholar]
- Launder, B.; Sharma, B. Application of the energy-dissipation model of turbulence to the calculation of flow near a spinning disc. Lett. Heat Mass Transf. 1974, 1, 131–137. [Google Scholar] [CrossRef]
- Speziale, C.G. On nonlinear kl and k-ε models of turbulence. J. Fluid Mech. 1987, 178, 459–475. [Google Scholar] [CrossRef]
- Shih, T.-H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A new k-ϵ eddy viscosity model for high reynolds number turbulent flows. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Yakhot, V.; Orszag, S.A. Renormalization group analysis of turbulence. I. Basic theory. J. Sci. Comput. 1986, 1, 3–51. [Google Scholar] [CrossRef]
- Yakhot, V.; Orszag, S.A.; Thangam, S.; Gatski, T.B.; Speziale, C.G. Development of turbulence models for shear flows by a double expansion technique. Phys. Fluids A Fluid Dyn. 1992, 4, 1510–1520. [Google Scholar] [CrossRef]
- Hanjalić, K.; Launder, B.E. A Reynolds stress model of turbulence and its application to thin shear flows. J. Fluid Mech. 1972, 52, 609–638. [Google Scholar] [CrossRef]
- Menter, F.; Egorov, Y. A scale adaptive simulation model using two-equation models. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005; p. 1095. [Google Scholar]
- Suryan, A.; Kim, H.D.; Setoguchi, T. Comparative study of turbulence models performance for refueling of compressed hydrogen tanks. Int. J. Hydrogen Energy 2013, 38, 9562–9569. [Google Scholar] [CrossRef]
- Martin, J.; Nouvelot, Q.; Ren, V.; Lodier, G.; Vyazmina, E.; Ammouri, F.; Carrere, P. CFD simulations of the refueling of long horizontal H2 tanks with tilted injector. Int. J. Hydrogen Energy 2023. [Google Scholar] [CrossRef]
- Gonin, R.; Horgue, P.; Guibert, R.; Fabre, D.; Bourguet, R.; Ammouri, F.; Vyazmina, E. Advanced turbulence modeling improves thermal gradient prediction during compressed hydrogen tank filling. Int. J. Hydrogen Energy 2023, 48, 30057–30068. [Google Scholar] [CrossRef]
- Melideo, D.; Baraldi, D.; Acosta-Iborra, B.; Cebolla, R.O.; Moretto, P. CFD simulations of filling and emptying of hydrogen tanks. Int. J. Hydrogen Energy 2017, 42, 7304–7313. [Google Scholar] [CrossRef]
- Cebolla, R.O.; Acosta, B.; Moretto, P.; Frischauf, N.; Harskamp, F.; Bonato, C.; Baraldi, D. Hydrogen tank first filling experiments at the JRC-IET GasTeF facility. Int. J. Hydrogen Energy 2014, 39, 6261–6267. [Google Scholar] [CrossRef]
- Favre, A. The Equations of Compressible Turbulent Gases, Annual Summary Report AD0622097; Defense Technical Information Center, 1 January 1965.
- Fiorina, B.; Vicquelin, R.; Auzillon, P.; Darabiha, N.; Gicquel, O.; Veynante, D. A filtered tabulated chemistry model for LES of premixed combustion. Combust. Flame 2010, 157, 465–475. [Google Scholar] [CrossRef]
- ANSYS® Fluent Theory Guide, Release 2020 R2; ANSYS, Inc.: Canonsburg, PA, USA, 2020; pp. 49–103.
- Dicken, C.; Mérida, W. Measured effects of filling time and initial mass on the temperature distribution within a hydrogen cylinder during refuelling. J. Power Sources 2007, 165, 324–336. [Google Scholar] [CrossRef]
- Launder, B.E.; Spalding, D.B. Lectures in Mathematical Models of Turbulence; Academic Press: London, UK, 1972. [Google Scholar]
- Schmitt, F.G. About Boussinesq’s turbulent viscosity hypothesis: Historical remarks and a direct evaluation of its validity. Comptes Rendus Méc. 2007, 335, 617–627. [Google Scholar] [CrossRef]
- Lien, F.; Leschziner, M. Assessment of turbulence-transport models including non-linear rng eddy-viscosity formulation and second-moment closure for flow over a backward-facing step. Comput. Fluids 1994, 23, 983–1004. [Google Scholar] [CrossRef]
- Canuto, V.M.; Cheng, Y. Determination of the Smagorinsky–Lilly constant CS. Phys. Fluids 1997, 9, 1368–1378. [Google Scholar] [CrossRef]
- Spalart, P.R. Detached-eddy simulation. Ann. Rev. Fluid Mech. 2009, 41, 181–202. [Google Scholar] [CrossRef]
- Temmerman, L.; Hirsch, C. Towards a successful implementation of DES strategies in industrial RANS solvers. In Advances in Hybrid RANS-LES Modelling; Notes on Numerical Fluid Mechanics and Multidisciplinary Design; Peng, S., Haase, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 97, pp. 232–241. [Google Scholar]
- Strelets, M. Turbulence modelling in convective flow of fires. In Proceedings of the Forth International Seminar on Fire and Explosion Hazards, Londonderry, Northern Ireland, UK, 8–12 September 2003; pp. 8–12. [Google Scholar]
- Spalart, P.R.; Deck, S.; Shur, M.L.; Squires, K.D.; Strelets, M.K.; Travin, A. A new version of detached-eddy simulation, resistant to ambiguous grid densities. Theor. Comput. Fluid Dyn. 2006, 20, 181–195. [Google Scholar] [CrossRef]
- Zheng, W.; Yan, C.; Liu, H.; Luo, D. Comparative assessment of SAS and DES turbulence modeling for massively separated flows. Acta Mech. Sin. 2015, 32, 12–21. [Google Scholar] [CrossRef]
- Menter, F.R.; Egorov, Y. The scale-adaptive simulation method for unsteady turbulent flow predictions. Part 1: Theory and model description. Flow Turbul. Combust. 2010, 85, 113–138. [Google Scholar] [CrossRef]
- Acosta, B.; Moretto, P.; de Miguel, N.; Ortiz, R.; Harskamp, F.; Bonato, C. JRC reference data from experiments of on-board hydrogen tanks fast filling. Int. J. Hydrogen Energy 2014, 39, 20531–20537. [Google Scholar] [CrossRef]
- Redlich, O.; Kwong, J.N. On the thermodynamics of solutions. V. An equation of state. Fugacities of gaseous solutions. Chem. Rev. 1949, 44, 233–244. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Overall Tank Characteristics | |
| Volume (L) | 29 |
| External length (mm) | 827 |
| External diameter (mm) | 279 |
| Inlet diameter (mm) | 3 |
| Thickness of liner (mm) | 2.7 |
| Thickness of composite shell (mm) | 21.8 |
| High-Density Polyethylene (HDPE) Liner Properties | |
| Density (kg/m3) | 945 |
| Thermal conductivity (W/m/K) | 0.385 |
| Specific heat capacity (J/kg/K) | 1580 |
| Carbon Fibre Reinforced Polymer (CFRP) Overwrap Properties | |
| Density (kg/m3) | 1494 |
| Thermal conductivity (W/m/K) | 0.74 |
| Specific heat capacity (J/kg/K) | 1120 |
| Mesh Name | CVs | ||
|---|---|---|---|
| In Pipe | In Tank | ||
| Mesh#1 | 94,720 | 500–2000 | 50–500 |
| Mesh#1-level 2 | 752,960 | 250–1000 | 25–250 |
| Mesh#2 | 259,200 | 100–500 | 2–10 |
| Case | Turbulence Model | Mesh * | Maximum Time Step (s) | Solution Time per Iteration (s) | Speed | |||
|---|---|---|---|---|---|---|---|---|
| Mass and Momentum Equations | Turbulence Model Equations | Energy Equation | CPU Time | Simulation Time/CPU Time (s/hour) | ||||
| #1 | Modified k-ε | Mesh#1 | 0.004 | 0.038 | 0.004 | 0.007 | 0.051 | 14.1 |
| #2 | Modified k-ε | Mesh#1-level 2 | 0.002 | 0.144 | 0.033 | 0.043 | 0.228 | 1.58 |
| #3 | Modified k-ε | Mesh#1 | 0.0004 | 0.019 | 0.003 | 0.007 | 0.032 | 2.25 |
| #4 | RSM | Mesh#1 | 0.0004 | 0.017 | 0.008 | 0.007 | 0.035 | 2.06 |
| #5 | DES | Mesh#1 | 0.0004 | 0.021 | 0.007 | 0.007 | 0.038 | 1.89 |
| #6 | SAS | Mesh#1 | 0.0004 | 0.019 | 0.008 | 0.008 | 0.040 | 1.80 |
| #7 | LES | Mesh#1 | 0.0004 | 0.014 | N/A | 0.008 | 0.026 | 2.77 |
| #8 | LES | Mesh#2 | 0.0001 | 0.046 | N/A | 0.019 | 0.077 | 0.234 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, H.; Makarov, D.; Kashkarov, S.; Molkov, V. CFD Simulations of Hydrogen Tank Fuelling: Sensitivity to Turbulence Model and Grid Resolution. Hydrogen 2023, 4, 1001-1021. https://doi.org/10.3390/hydrogen4040058
Xie H, Makarov D, Kashkarov S, Molkov V. CFD Simulations of Hydrogen Tank Fuelling: Sensitivity to Turbulence Model and Grid Resolution. Hydrogen. 2023; 4(4):1001-1021. https://doi.org/10.3390/hydrogen4040058
Chicago/Turabian StyleXie, Hanguang, Dmitriy Makarov, Sergii Kashkarov, and Vladimir Molkov. 2023. "CFD Simulations of Hydrogen Tank Fuelling: Sensitivity to Turbulence Model and Grid Resolution" Hydrogen 4, no. 4: 1001-1021. https://doi.org/10.3390/hydrogen4040058