
Engineering Emergence: A Survey on Control in the World of Complex Networks


Abstract
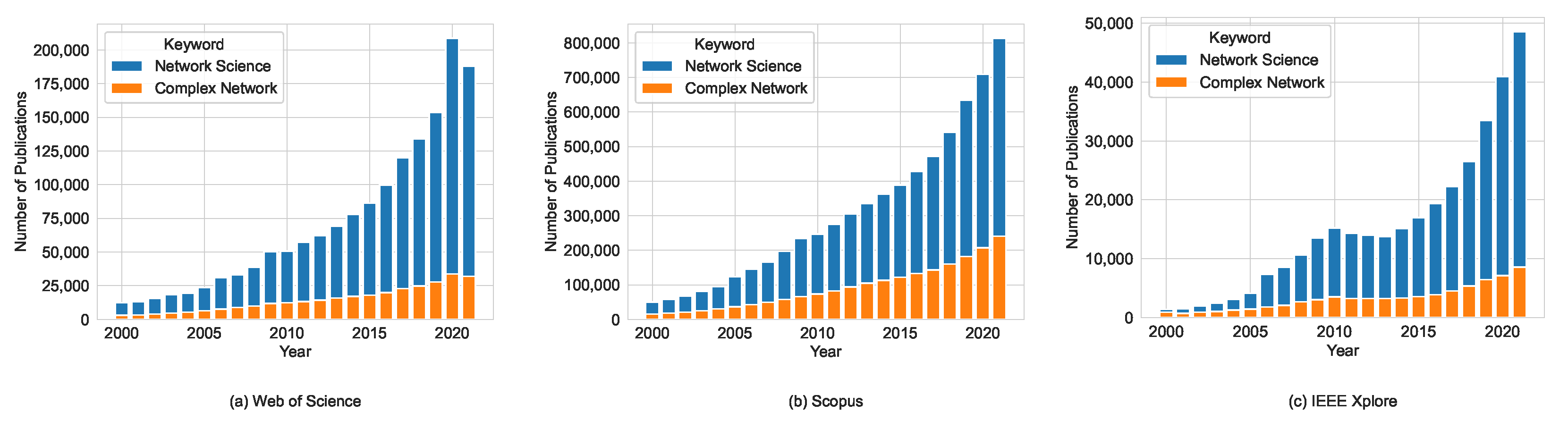
:1. Introduction
2. Control vs. Networks
2.1. Control vs. Networks: Are We Speaking the Same Language?
2.2. Control of the (Communication) Network
2.3. Control over the Network
2.4. Predictive Control: A Deserving Hero
3. Control of Complex Networks: Is Emergence Lost?
3.1. Observability, Controllability, and Stability
3.2. Synchronization in Complex Networks
3.3. Emergence
4. Engineering Emergence: Decentralized Control over Complex Networks
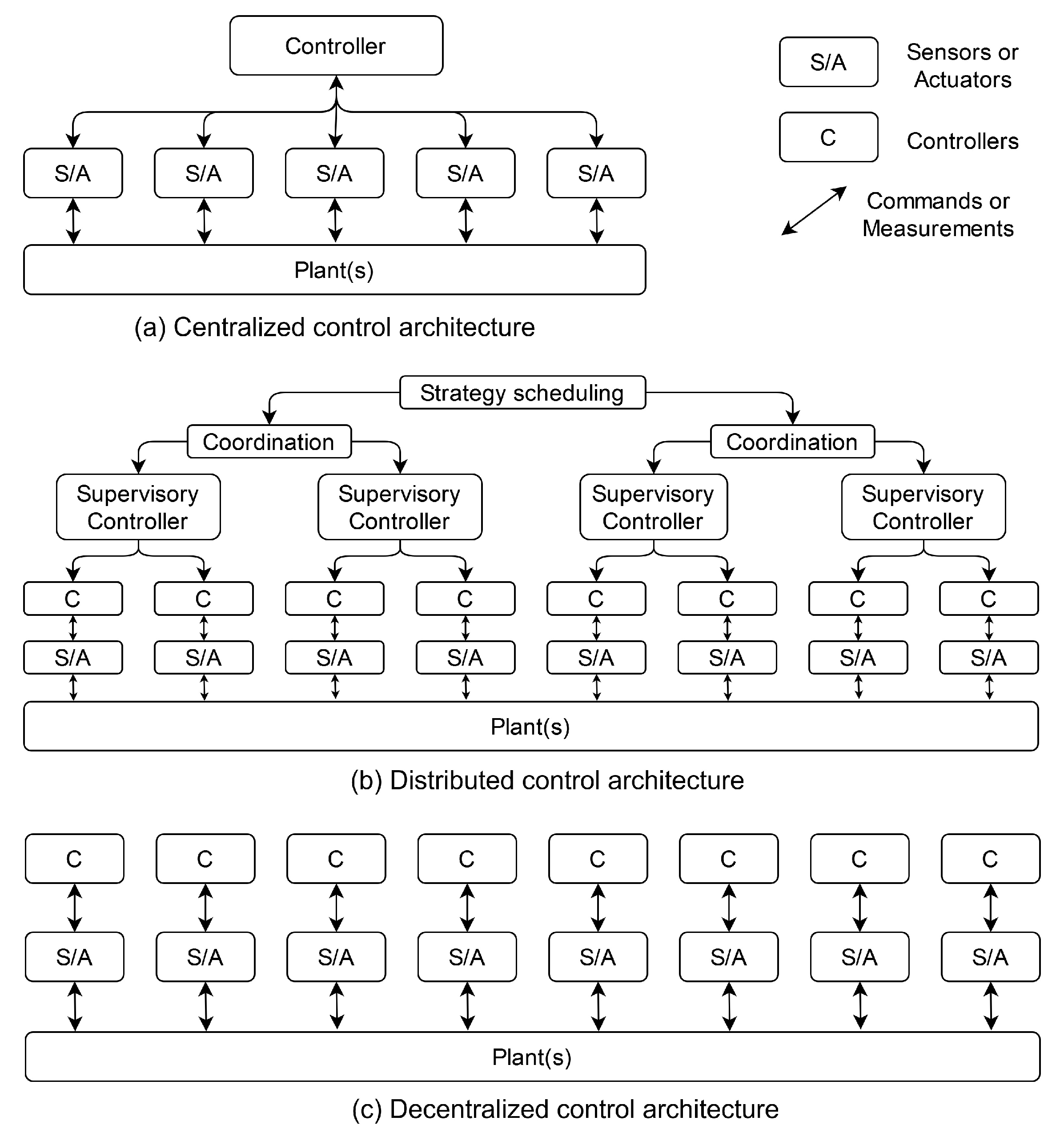
4.1. Distributed vs. Decentralized Control
4.2. Emergence and Consensus through Decentralized Control in Complex Networks
5. Open Questions and Perspectives
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barabási, A.L. Network Science; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Molontay, R.; Nagy, M. Two decades of network science: As seen through the co-authorship network of network scientists. In Proceedings of the 2019 IEEE/ACM International Conference on Advances in Social Networks Analysis and Mining, Vancouver, BC, Canada, 27–30 August 2019; pp. 578–583. [Google Scholar]
- Vespignani, A. Twenty years of network science. Nature 2018, 558, 528–529. [Google Scholar] [CrossRef] [PubMed]
- Lewis, T.G. Network Science; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Börner, K.; Sanyal, S.; Vespignani, A. Network science. Annu. Rev. Inf. Sci. Technol. 2007, 41, 537–607. [Google Scholar] [CrossRef]
- Biagini, F.; Kauermann, G.; Meyer-Brandis, T. Network Science; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Serrano, D.H.; Hernández-Serrano, J.; Gómez, D.S. Simplicial degree in complex networks. Applications of topological data analysis to network science. Chaos Solitons Fractals 2020, 137, 109839. [Google Scholar] [CrossRef]
- Rathkopf, C. Network representation and complex systems. Synthese 2018, 195, 55–78. [Google Scholar] [CrossRef]
- Huang, J.; Feng, Y.; Zhang, S. Research of complex system theory application on reliability analysis of network system. In Proceedings of the 2009 8th International Conference on Reliability, Maintainability and Safety, Chengdu, China, 20–24 July 2009; pp. 1141–1145. [Google Scholar]
- Yang, Y.; Yang, H. Complex network-based time series analysis. Phys. A Stat. Mech. Its Appl. 2008, 387, 1381–1386. [Google Scholar] [CrossRef]
- Telesford, Q.K.; Simpson, S.L.; Burdette, J.H.; Hayasaka, S.; Laurienti, P.J. The brain as a complex system: Using network science as a tool for understanding the brain. Brain Connect. 2011, 1, 295–308. [Google Scholar] [CrossRef]
- Zhang, Z.; Jia, L.; Chai, Y.; Guo, M. On conceptual and methodological issues in control of complex systems. In Proceedings of the 2008 IEEE International Conference on Systems, Man and Cybernetics, Singapore, 12–15 October 2008; pp. 3576–3581. [Google Scholar]
- Akundi, A.; Smith, E.; Tseng, T.L.; Rubio, I. An attempt to understand information processing capability in complex networks. In Proceedings of the 2018 Annual IEEE International Systems Conference (SysCon), Vancouver, BC, Canada, 23–26 April 2018; pp. 1–6. [Google Scholar]
- Sillitto, H.; Martin, J.; McKinney, D.; Griego, R.; Dori, D.; Krob, D.; Godfrey, P.; Arnold, E.; Jackson, S. Systems engineering and system definitions. In Proceedings of the INCOSE, Biarritz, France, 11–13 September 2019. [Google Scholar]
- Qiao, S.; Han, N.; Gao, Y.; Li, R.H.; Huang, J.; Sun, H.; Wu, X. Dynamic community evolution analysis framework for large-scale complex networks based on strong and weak events. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 6229–6243. [Google Scholar] [CrossRef]
- Ling, B.W.K.; Stewart, P.; Teo, K.L.; Chi, K.T. Study of near consensus complex social networks using eigen theory. In Proceedings of the 2011 IEEE International Symposium of Circuits and Systems (ISCAS), Rio de Janeiro, Brazil, 15–18 May 2011; pp. 2107–2110. [Google Scholar]
- Du, F.; Xuan, Q.; Wu, T.J. Simplification of complex networks by folding. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2010; pp. 4667–4670. [Google Scholar]
- Watts, D.J.; Strogatz, S.H. Collective dynamics of ‘small-world’ networks. Nature 1998, 393, 440–442. [Google Scholar] [CrossRef]
- Barabási, A.L.; Albert, R. Emergence of scaling in random networks. Science 1999, 286, 509–512. [Google Scholar] [CrossRef]
- Ravasz, E.; Somera, A.L.; Mongru, D.A.; Oltvai, Z.N.; Barabási, A.L. Hierarchical organization of modularity in metabolic networks. Science 2002, 297, 1551–1555. [Google Scholar] [CrossRef]
- Wu, J.; Barahona, M.; Tan, Y.J.; Deng, H.Z. Spectral measure of structural robustness in complex networks. IEEE Trans. Syst. Man Cybern.-Part A Syst. Hum. 2011, 41, 1244–1252. [Google Scholar] [CrossRef]
- Nan-nan, Z.; Xin-yu, O. Summary on emergence of complex systems. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015; pp. 668–671. [Google Scholar]
- Liu, F.; Xiao, B.; Li, H.; Xue, J. Complex Network Node Centrality Measurement Based on Multiple Attributes. In Proceedings of the 2018 10th International Conference on Modelling, Identification and Control (ICMIC), Guiyang, China, 2–4 July 2018; pp. 1–5. [Google Scholar]
- Karcanias, N.; Hessami, A.G. Complexity and the notion of system of systems: Part (I): General systems and complexity. In Proceedings of the 2010 World Automation Congress, Kobe, Japan, 19–23 September 2010; pp. 1–7. [Google Scholar]
- Boardman, J.; Sauser, B. System of Systems-the meaning of of. In Proceedings of the 2006 IEEE/SMC International Conference on System of Systems Engineering, Los Angeles, CA, USA, 24–26 April 2006; pp. 77–82. [Google Scholar]
- Gupta, R.A.; Chow, M.Y. Networked control system: Overview and research trends. IEEE Trans. Ind. Electron. 2009, 57, 2527–2535. [Google Scholar] [CrossRef]
- Fan, Z.; Yu, X.; Wan, H.; Kang, M.; Liu, Y.; He, Y.; Xiao, G. A Time-Delay-Bounded Data Scheduling Algorithm for Delay Reduction in Distributed Networked Control Systems. Math. Probl. Eng. 2020, 2020, 8290879. [Google Scholar] [CrossRef]
- Web of Science. Available online: http://webofscience.com/ (accessed on 12 January 2022).
- Scopus. Available online: https://www.scopus.com/ (accessed on 12 January 2022).
- IEEEXplore. Available online: https://ieeexplore.ieee.org/ (accessed on 12 January 2022).
- ACM-DL. Available online: https://dl.acm.org/ (accessed on 12 January 2022).
- Scarselli, F.; Gori, M.; Tsoi, A.C.; Hagenbuchner, M.; Monfardini, G. The graph neural network model. IEEE Trans. Neural Netw. 2008, 20, 61–80. [Google Scholar] [CrossRef]
- Backhaus, M.; Schaefer, G. Towards the Complexity of the Widest Path Problem in Hybrid Multi-Channel WMNs. In Proceedings of the 2020 16th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob) (50308), Thessaloniki, Greece, 12–14 October 2020; pp. 378–381. [Google Scholar]
- Zhu, S.; Xu, Y. Complexity measure of supply chain networks. In Proceedings of the IEEE 2012 24th Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012; pp. 2220–2224. [Google Scholar]
- Zhou, B.; Pei, J. Preserving privacy in social networks against neighborhood attacks. In Proceedings of the 2008 IEEE 24th International Conference on Data Engineering, Cancun, Mexico, 7–12 April 2008; pp. 506–515. [Google Scholar]
- Mittal, S.; Siddiqui, A.S. Networked control system: Survey and directions. J. Eng. Res. Stud. 2010, 1, 35–50. [Google Scholar]
- Zhang, X.M.; Han, Q.L.; Yu, X. Survey on recent advances in networked control systems. IEEE Trans. Ind. Inform. 2015, 12, 1740–1752. [Google Scholar] [CrossRef]
- Cancan, G.; Chen, P.; Jin, Z.; Dacheng, P. A survey on networked control systems subject to limited network resources. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 4958–4965. [Google Scholar]
- Bemporad, A.; Heemels, M.; Johansson, M. Networked Control Systems; Springer: Berlin/Heidelberg, Germany, 2010; Volume 406. [Google Scholar]
- Proskurnikov, A.V.; Fradkov, A.L. Problems and methods of network control. Autom. Remote Control 2016, 77, 1711–1740. [Google Scholar] [CrossRef]
- Fencl, T.; Burget, P.; Bilek, J. Network topology design. Control Eng. Pract. 2011, 19, 1287–1296. [Google Scholar] [CrossRef]
- Tang, Y.; Qian, F.; Gao, H.; Kurths, J. Synchronization in complex networks and its application—A survey of recent advances and challenges. Annu. Rev. Control 2014, 38, 184–198. [Google Scholar] [CrossRef]
- Xiao, Y.; Xue, Y.; Nazarian, S.; Bogdan, P. A load balancing inspired optimization framework for exascale multicore systems: A complex networks approach. In Proceedings of the 2017 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), Irvine, CA, USA, 13–16 November 2017; pp. 217–224. [Google Scholar]
- Papagianni, C.; Papadopoulos, K.; Pappas, C.; Tselikas, N.D.; Kaklamani, D.; Venieris, I.S. Communication network design using particle swarm optimization. In Proceedings of the 2008 International Multiconference on Computer Science and Information Technology, Wisla, Poland, 20–22 October 2008; pp. 915–920. [Google Scholar]
- Pimentel, J.; Arif, J. Communication Network Optimization for Subsea Processing Fields Development. In Proceedings of the 2019 Petroleum and Chemical Industry Conference Europe (PCIC EUROPE), Paris, France, 7–9 May 2019; pp. 1–8. [Google Scholar]
- Altiparmak, F.; Dengiz, B. A cross entropy approach to design of reliable networks. Eur. J. Oper. Res. 2009, 199, 542–552. [Google Scholar] [CrossRef]
- You, K.; Xie, L. Network topology and communication data rate for consensusability of discrete-time multi-agent systems. IEEE Trans. Autom. Control 2011, 56, 2262–2275. [Google Scholar] [CrossRef]
- Sharma, P.; Bucci, D.J.; Brahma, S.K.; Varshney, P.K. Communication network topology inference via transfer entropy. IEEE Trans. Netw. Sci. Eng. 2019, 7, 562–575. [Google Scholar] [CrossRef]
- Jia, G.; Zhu, Y.; Li, Y.; Zhu, Z.; Zhou, L. Analysis of the Effect of the Reliability of the NB-Iot Network on the Intelligent System. IEEE Access 2019, 7, 112809–112820. [Google Scholar]
- Kim, K.D.; Kumar, P. The importance, design and implementation of a middleware for networked control systems. In Networked Control Systems; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1–29. [Google Scholar]
- Bregni, S. Fast algorithms for TVAR and MTIE computation in characterization of network synchronization performance. Networks 2001, 5, 12. [Google Scholar]
- Al-Mekhlafi, Z.G.; Hanapi, Z.M.; Saleh, A.M.S. Firefly-inspired time synchronization mechanism for self-organizing energy-efficient wireless sensor networks: A survey. IEEE Access 2019, 7, 115229–115248. [Google Scholar] [CrossRef]
- Hasan, K.F.; Wang, C.; Feng, Y.; Tian, Y.C. Time synchronization in vehicular ad-hoc networks: A survey on theory and practice. Veh. Commun. 2018, 14, 39–51. [Google Scholar] [CrossRef]
- Yiğitler, H.; Badihi, B.; Jäntti, R. Overview of time synchronization for iot deployments: Clock discipline algorithms and protocols. Sensors 2020, 20, 5928. [Google Scholar] [CrossRef]
- Puttnies, H.; Danielis, P.; Sharif, A.R.; Timmermann, D. Estimators for Time Synchronization—Survey, Analysis, and Outlook. IoT 2020, 1, 398–435. [Google Scholar] [CrossRef]
- Wang, S.; Shi, M.; Li, D.; Du, T. A survey of time synchronization algorithms for wireless sensor networks. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 6392–6397. [Google Scholar]
- Lee, H.; Lee, K.J.; Kim, H.; Clerckx, B.; Lee, I. Resource allocation techniques for wireless powered communication networks with energy storage constraint. IEEE Trans. Wirel. Commun. 2015, 15, 2619–2628. [Google Scholar] [CrossRef]
- Banner, R.; Orda, A. Bottleneck routing games in communication networks. IEEE J. Sel. Areas Commun. 2007, 25, 1173–1179. [Google Scholar] [CrossRef]
- Soo, W.K.; Ling, T.C.; Maw, A.H.; Win, S.T. Survey on load-balancing methods in 802.11 infrastructure mode wireless networks for improving quality of service. ACM Comput. Surv. (CSUR) 2018, 51, 1–21. [Google Scholar] [CrossRef]
- Neghabi, A.A.; Navimipour, N.J.; Hosseinzadeh, M.; Rezaee, A. Load balancing mechanisms in the software defined networks: A systematic and comprehensive review of the literature. IEEE Access 2018, 6, 14159–14178. [Google Scholar] [CrossRef]
- Reindl, A.; Wetzel, D.; Balbierer, N.; Meier, H.; Niemetz, M.; Park, S. Comparative Analysis of CAN CAN FD and Ethernet for Networked Control Systems. In Proceedings of the Embedded World Conference Digital, Virtual, 1–5 March2021. [Google Scholar]
- Kawamoto, Y.; Nishiyama, H.; Kato, N. Toward terminal-to-terminal communication networks: A hybrid MANET and DTN approach. In Proceedings of the 2013 IEEE 18th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Berlin, Germany, 25–27 September 2013; pp. 228–232. [Google Scholar]
- Lu, K.; Qian, Y.; Chen, H. A secure and service-oriented network control framework for WiMAX networks. IEEE Commun. Mag. 2007, 45, 124. [Google Scholar] [CrossRef]
- Xia, Y.; Hill, D.J. Attack vulnerability of complex communication networks. IEEE Trans. Circuits Syst. II Express Briefs 2008, 55, 65–69. [Google Scholar] [CrossRef]
- Bhatt, S.; Ragiri, P.R. Security trends in Internet of Things: A survey. SN Appl. Sci. 2021, 3, 121. [Google Scholar]
- Zhang, W.; Branicky, M.S.; Phillips, S.M. Stability of networked control systems. IEEE Control Syst. Mag. 2001, 21, 84–99. [Google Scholar]
- Zhang, X.M.; Han, Q.L.; Ge, X.; Ding, D.; Ding, L.; Yue, D.; Peng, C. Networked control systems: A survey of trends and techniques. IEEE/CAA J. Autom. Sin. 2019, 7, 1–17. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, H.; Kaynak, O. Network-induced constraints in networked control systems—A survey. IEEE Trans. Ind. Inform. 2012, 9, 403–416. [Google Scholar] [CrossRef]
- Wu, F.G.; Sun, F.C.; Xue, D.Q.; Sun, Z.Q. Problems and strategies of networked control systems. In Proceedings of the 2002 IEEE Region 10 Conference on Computers, Communications, Control and Power Engineering (TENCOM’02), Beijing, China, 28–31 October 2002; Volume 3, pp. 1692–1695. [Google Scholar]
- Abdolmaleki, B.; Shafiee, Q.; Seifi, A.R.; Arefi, M.M.; Blaabjerg, F. A zeno-free event-triggered secondary control for ac microgrids. IEEE Trans. Smart Grid 2019, 11, 1905–1916. [Google Scholar] [CrossRef]
- Nowzari, C.; Cortés, J. Zeno-free, distributed event-triggered communication and control for multi-agent average consensus. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 2148–2153. [Google Scholar]
- Sun, Z.; Huang, N.; Anderson, B.D.; Duan, Z. A new distributed zeno-free event-triggered algorithm for multi-agent consensus. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 3444–3449. [Google Scholar]
- Yu, H.; Chen, T. On Zeno behavior in event-triggered finite-time consensus of multi-agent systems. IEEE Trans. Autom. Control 2020, 66, 4700–4714. [Google Scholar] [CrossRef]
- Wittenmark, B.; Nilsson, J.; Torngren, M. Timing problems in real-time control systems. In Proceedings of the 1995 American Control Conference (ACC’95), Seattle, WA, USA, 21–23 June 1995; Volume 3, pp. 2000–2004. [Google Scholar]
- Englehart, K.; Hudgins, B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2003, 50, 848–854. [Google Scholar] [CrossRef] [PubMed]
- Campisano, A.; Cabot Ple, J.; Muschalla, D.; Pleau, M.; Vanrolleghem, P.A. Potential and limitations of modern equipment for real time control of urban wastewater systems. Urban Water J. 2013, 10, 300–311. [Google Scholar] [CrossRef]
- Dotoli, M.; Epicoco, N.; Falagario, M.; Turchiano, B.; Cavone, G.; Convertini, A. A decision support system for real-time rescheduling of railways. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 696–701. [Google Scholar]
- Creaco, E.; Campisano, A.; Fontana, N.; Marini, G.; Page, P.; Walski, T. Real time control of water distribution networks: A state-of-the-art review. Water Res. 2019, 161, 517–530. [Google Scholar] [CrossRef] [PubMed]
- Zhao, G.; Imran, M.A.; Pang, Z.; Chen, Z.; Li, L. Toward real-time control in future wireless networks: Communication-control co-design. IEEE Commun. Mag. 2018, 57, 138–144. [Google Scholar] [CrossRef]
- Ge, Y.; Tian, L.; Liu, Z. Survey on the stability of networked control systems. J. Control Theory Appl. 2007, 5, 374–379. [Google Scholar] [CrossRef]
- Zhang, W.A.; Yu, L. Modelling and control of networked control systems with both network-induced delay and packet-dropout. Automatica 2008, 44, 3206–3210. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Hamdan, M.M. Fundamental issues in networked control systems. IEEE/CAA J. Autom. Sin. 2018, 5, 902–922. [Google Scholar] [CrossRef]
- Jungers, M.; Castelan, E.B.; Moraes, V.M.; Moreno, U.F. A dynamic output feedback controller for NCS based on delay estimates. Automatica 2013, 49, 788–792. [Google Scholar] [CrossRef]
- Chunmao, L.; Jian, X. Adaptive delay estimation and control of networked control systems. In Proceedings of the 2006 International Symposium on Communications and Information Technologies, Bangkok, Thailand, 18–20 October 2006; pp. 707–710. [Google Scholar]
- Ghanaim, A.; Borges, G.A.; Frey, G. Estimating delays in networked control systems using colored Petri nets and Markov chain models. In Proceedings of the 2009 IEEE Conference on Emerging Technologies & Factory Automation, Palma de Mallorca, Spain, 22–25 September 2009; pp. 1–6. [Google Scholar]
- Yang, Y.; Wang, Y.J. Modeling and control for NCS with time-varying long delays. In Proceedings of the 2005 International Conference on Machine Learning and Cybernetics, Guangzhou, China, 18–21 August 2005; Volume 3, pp. 1407–1411. [Google Scholar]
- Feng, H.; Macedo, H.D.; Larsen, P.G. Estimating the maximum allowable delay bound for networked control systems using co-simulation and design space exploration. In Control Strategy for Time-Delay Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 257–280. [Google Scholar]
- Hespanha, J.P.; Naghshtabrizi, P.; Xu, Y. A survey of recent results in networked control systems. Proc. IEEE 2007, 95, 138–162. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, Q.; Qiu, Z. Feedback control of NCS with time-delay and data packet dropout. Syst. Eng. Electron. 2007, 29, 262–268. [Google Scholar]
- Lian, F.L.; Moyne, J.; Tilbury, D. Modelling and optimal controller design of networked control systems with multiple delays. Int. J. Control 2003, 76, 591–606. [Google Scholar] [CrossRef]
- Gabel, O.; Litz, L. QoS-adaptive control in NCS with variable delays and packet losses-a heuristic approach. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No. 04CH37601), Nassau, Bahamas, 14–17 December 2004; Volume 2, pp. 1586–1591. [Google Scholar]
- Zhao, H.; Wu, M.; Liu, G.; She, J. H-infinity control for networked control systems (NCS) with time-varying delays. J. Control Theory Appl. 2005, 3, 157–162. [Google Scholar] [CrossRef]
- Li, F.; Gao, L.; Dou, G.; Zheng, B. Dual-side event-triggered output feedback H∞ control for NCS with communication delays. Int. J. Control Autom. Syst. 2018, 16, 108–119. [Google Scholar] [CrossRef]
- Awad, O.A. Fuzzy PID Gain Scheduling Controller for Networked Control System. Iraqi J. Sci. 2021, 210–216. [Google Scholar] [CrossRef]
- Zhao, S. Model Reference Scheduling and Robust Resilient H-infinity Control Co-design with Time-delay. In Proceedings of the 2021 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 8–11 August 2021; pp. 537–541. [Google Scholar]
- Liu, K.; Selivanov, A.; Fridman, E. Survey on time-delay approach to networked control. Annu. Rev. Control 2019, 48, 57–79. [Google Scholar] [CrossRef]
- Amin, S.; Cárdenas, A.A.; Sastry, S.S. Safe and secure networked control systems under denial-of-service attacks. In Proceedings of the International Workshop on Hybrid Systems: Computation and Control, San Francisco, CA, USA, 13–15 April 2009; pp. 31–45. [Google Scholar]
- Sollfrank, M.; Pirehgalin, M.F.; Vogel-Heuser, B. Integration of safety aspects in modeling of Networked Control Systems. In Proceedings of the 2017 IEEE 15th International Conference on Industrial Informatics (INDIN), Emden, Germany, 24–26 July 2017; pp. 405–412. [Google Scholar]
- Pang, Z.H.; Fan, L.Z.; Sun, J.; Liu, K.; Liu, G.P. Detection of stealthy false data injection attacks against networked control systems via active data modification. Inf. Sci. 2021, 546, 192–205. [Google Scholar] [CrossRef]
- Hussain, A.; Amin, S. NCS security experimentation using DETER. In Proceedings of the 1st international conference on High Confidence Networked Systems, Beijing, China, 17–18 April 2012; pp. 73–80. [Google Scholar]
- Mo, Y.; Garone, E.; Casavola, A.; Sinopoli, B. False data injection attacks against state estimation in wireless sensor networks. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5967–5972. [Google Scholar]
- Peng, C.; Sun, H.; Yang, M.; Wang, Y.L. A survey on security communication and control for smart grids under malicious cyber attacks. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1554–1569. [Google Scholar] [CrossRef]
- Ding, D.; Han, Q.L.; Xiang, Y.; Ge, X.; Zhang, X.M. A survey on security control and attack detection for industrial cyber-physical systems. Neurocomputing 2018, 275, 1674–1683. [Google Scholar] [CrossRef]
- Fang, H.; Ye, H.; Zhong, M. Fault diagnosis of networked control systems. Annu. Rev. Control 2007, 31, 55–68. [Google Scholar] [CrossRef]
- Wang, Y.L.; Lim, C.C.; Shi, P. Adaptively adjusted event-triggering mechanism on fault detection for networked control systems. IEEE Trans. Cybern. 2016, 47, 2299–2311. [Google Scholar] [CrossRef]
- Mao, Z.; Jiang, B.; Shi, P. Protocol and fault detection design for nonlinear networked control systems. IEEE Trans. Circuits Syst. II Express Briefs 2009, 56, 255–259. [Google Scholar]
- Zeng, W.; Chow, M.Y. Resilient distributed control in the presence of misbehaving agents in networked control systems. IEEE Trans. Cybern. 2014, 44, 2038–2049. [Google Scholar] [CrossRef] [PubMed]
- Sauter, D.; Li, S.; Aubrun, C. Robust fault diagnosis of networked control systems. Int. J. Adapt. Control Signal Process. 2009, 23, 722–736. [Google Scholar] [CrossRef]
- Ding, S.X. Advanced Methods for Fault Diagnosis and Fault-Tolerant Control; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Baillieul, J.; Antsaklis, P.J. Control and communication challenges in networked real-time systems. Proc. IEEE 2007, 95, 9–28. [Google Scholar] [CrossRef]
- Merrad, W.; Rachedi, A.; Busawon, K.; Binns, R. A survey on smart traffic network control and optimization. In Proceedings of the 2016 International Conference Multidisciplinary Engineering Design Optimization (MEDO), Belgrade, Serbia, 14–16 September 2016; pp. 1–6. [Google Scholar]
- Hu, J.; Zhang, H.; Liu, H.; Yu, X. A survey on sliding mode control for networked control systems. Int. J. Syst. Sci. 2021, 52, 1129–1147. [Google Scholar] [CrossRef]
- Heemels, W.M.H.; Teel, A.R.; Van de Wouw, N.; Nešić, D. Networked control systems with communication constraints: Tradeoffs between transmission intervals, delays and performance. IEEE Trans. Autom. Control 2010, 55, 1781–1796. [Google Scholar] [CrossRef]
- Sun, H.; Sun, J.; Chen, J. Analysis and synthesis of networked control systems with random network-induced delays and sampling intervals. Automatica 2021, 125, 109385. [Google Scholar] [CrossRef]
- Allan, D.A.; Bates, C.N.; Risbeck, M.J.; Rawlings, J.B. On the inherent robustness of optimal and suboptimal nonlinear MPC. Syst. Control Lett. 2017, 106, 68–78. [Google Scholar] [CrossRef]
- Yu, S.; Reble, M.; Chen, H.; Allgöwer, F. Inherent robustness properties of quasi-infinite horizon MPC. IFAC Proc. Vol. 2011, 44, 179–184. [Google Scholar] [CrossRef]
- Berner, P.S.; Mönnigmann, M. A comparison of four variants of event-triggered networked MPC. In Proceedings of the 2016 IEEE Conference on Control Applications (CCA), Buenos Aires, Argentina, 19–22 September 2016; pp. 1519–1524. [Google Scholar]
- Bianchi, D.; Ferrara, A.; Di Benedetto, M.D. Networked model predictive traffic control with time varying optimization horizon: The Grenoble South Ring case study. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 4039–4044. [Google Scholar]
- Grüne, L.; Pannek, J.; Worthmann, K. A networked unconstrained nonlinear MPC scheme. In Proceedings of the 2009 European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009; pp. 371–376. [Google Scholar]
- Xia, Y.Q.; Gao, Y.L.; Yan, L.P.; Fu, M.Y. Recent progress in networked control systems—A survey. Int. J. Autom. Comput. 2015, 12, 343–367. [Google Scholar] [CrossRef]
- Yang, T.C. Networked control system: A brief survey. IEE Proc.-Control Theory Appl. 2006, 153, 403–412. [Google Scholar] [CrossRef]
- Onat, A.; Naskali, T.; Parlakay, E.; Mutluer, O. Control over imperfect networks: Model-based predictive networked control systems. IEEE Trans. Ind. Electron. 2010, 58, 905–913. [Google Scholar] [CrossRef]
- Shu, S.; Lin, F. Predictive networked control of discrete event systems. IEEE Trans. Autom. Control 2016, 62, 4698–4705. [Google Scholar] [CrossRef]
- Liu, K.; Ma, A.; Xia, Y.; Sun, Z.; Johansson, K.H. Network scheduling and control co-design for multi-loop MPC. IEEE Trans. Autom. Control 2019, 64, 5238–5245. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.; Qiu, H. Networked coordination-based distributed model predictive control for large-scale system. IEEE Trans. Control Syst. Technol. 2012, 21, 991–998. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, L.; Chen, T. Model predictive control for networked control systems. Int. J. Robust Nonlinear Control IFAC-Affil. J. 2009, 19, 1016–1035. [Google Scholar] [CrossRef]
- Wang, T.; Gao, H.; Qiu, J. A combined adaptive neural network and nonlinear model predictive control for multirate networked industrial process control. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 416–425. [Google Scholar] [CrossRef]
- Vafamand, N.; Khooban, M.H.; Dragičević, T.; Blaabjerg, F. Networked fuzzy predictive control of power buffers for dynamic stabilization of DC microgrids. IEEE Trans. Ind. Electron. 2018, 66, 1356–1362. [Google Scholar] [CrossRef]
- Zhu, B.; Guo, K.; Xie, L. A new distributed model predictive control for unconstrained double-integrator multiagent systems. IEEE Trans. Autom. Control 2018, 63, 4367–4374. [Google Scholar] [CrossRef]
- Li, A.; Sun, J. Self-triggered Model Predictive Control for Nonlinear Continuous-time Networked System via Ensured Performance Control Samples Selection. Int. J. Control 2021, 1–18. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, Y.; Shi, P. Design and stability analysis of networked predictive control systems. IEEE Trans. Control Syst. Technol. 2012, 21, 1495–1501. [Google Scholar] [CrossRef]
- Pătraşcu, M. Smith predictor approximation for industrial control applications with genetic algorithms. In Proceedings of the 2021 International Conference on Applied Artificial Intelligence (ICAPAI), Halden, Norway, 19–21 May 2021; pp. 1–6. [Google Scholar]
- Vişcoţel, L.A.; Pătraşcu, M. Design of Stabilizing Predictor-based Controller for Closed Loop Traffic Control with Real-Coded Genetic Algorithms. In Proceedings of the 2021 European Control Conference (ECC), Delft, The Netherlands, 29 June–2 July 2021; pp. 23–28. [Google Scholar]
- Silveira, A.; Sodre, L.; Silva, A.; Conde, L.; Borges, J.; Souza, Y.; Klautau, A. Smith Predictor-based Adaptive Control of Network-Controlled UAVs. In Proceedings of the XV Simposio Brasileiro de Automacao Inteligente SBAI. Sociedade Brasileira de Automatica (SBA), Virtual Event, 17–20 October 2021. [Google Scholar]
- Bonala, S.; Subudhi, B.; Ghosh, S. On delay robustness improvement using digital Smith predictor for networked control systems. Eur. J. Control 2017, 34, 59–65. [Google Scholar] [CrossRef]
- Feng, D.; Qingquan, Q. Networked control systems based on generalized predictive control and modified Smith predictor. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 7859–7863. [Google Scholar]
- Du, W.; Du, F. Novel smith predictor and fuzzy control for networked control systems. In Proceedings of the 2009 Asia-Pacific Conference on Information Processing, Shenzhen, China, 18–19 July 2009; Volume 1, pp. 75–78. [Google Scholar]
- Du, F.; Qian, Q.; Du, W. Networked control systems based on new smith predictor. J. Southwest Jiaotong Univ. 2010, 45, 65–69. [Google Scholar]
- Zhang, H.; Shi, Y.; Wang, J.; Chen, H. A new delay-compensation scheme for networked control systems in controller area networks. IEEE Trans. Ind. Electron. 2018, 65, 7239–7247. [Google Scholar] [CrossRef]
- Du, F.; Qian, Q. Fuzzy immune self-regulating PID control based on modified Smith Predictor for networked control systems. In Proceedings of the 2008 IEEE International Conference on Networking, Sensing and Control, Sanya, China, 6–8 April 2008; pp. 424–428. [Google Scholar]
- Cuenca, A.; Salt, J.; Casanova, V.; Pizá, R. An approach based on an adaptive multi-rate Smith predictor and gain scheduling for a networked control system: Implementation over Profibus-DP. Int. J. Control Autom. Syst. 2010, 8, 473–481. [Google Scholar] [CrossRef]
- Ruths, J.; Ruths, D. Control profiles of complex networks. Science 2014, 343, 1373–1376. [Google Scholar] [CrossRef]
- Wang, X.F.; Chen, G. Complex networks: Small-world, scale-free and beyond. IEEE Circuits Syst. Mag. 2003, 3, 6–20. [Google Scholar] [CrossRef]
- Motter, A.E.; Myers, S.A.; Anghel, M.; Nishikawa, T. Spontaneous synchrony in power-grid networks. Nat. Phys. 2013, 9, 191–197. [Google Scholar] [CrossRef]
- Wang, Y.; Fan, H.; Lin, W.; Lai, Y.C.; Wang, X. Growth, collapse and self-organized criticality in complex networks. Sci. Rep. 2016, 6, 1–12. [Google Scholar] [CrossRef]
- Angelidis, G.; Ioannidis, E.; Makris, G.; Antoniou, I.; Varsakelis, N. Competitive Conditions in Global Value Chain Networks: An Assessment Using Entropy and Network Analysis. Entropy 2020, 22, 1068. [Google Scholar] [CrossRef]
- Pasemann, F. Complex dynamics and the structure of small neural networks. Netw. Comput. Neural Syst. 2002, 13, 195–216. [Google Scholar] [CrossRef]
- Dufour, C.; Mahseredjian, J.; Bélanger, J. A combined state-space nodal method for the simulation of power system transients. IEEE Trans. Power Deliv. 2010, 26, 928–935. [Google Scholar] [CrossRef]
- De Domenico, M.; Biamonte, J. Spectral entropies as information-theoretic tools for complex network comparison. Phys. Rev. X 2016, 6, 041062. [Google Scholar] [CrossRef]
- Dehmer, M. Information-theoretic concepts for the analysis of complex networks. Appl. Artif. Intell. 2008, 22, 684–706. [Google Scholar] [CrossRef]
- Csányi, G.; Szendrői, B. Fractal–small-world dichotomy in real-world networks. Phys. Rev. E 2004, 70, 016122. [Google Scholar] [CrossRef]
- Provan, K.G.; Fish, A.; Sydow, J. Interorganizational networks at the network level: A review of the empirical literature on whole networks. J. Manag. 2007, 33, 479–516. [Google Scholar] [CrossRef]
- Papadimitriou, F. Spatial Entropy of Directional Geographical Data and Landscape Networks. In Spatial Entropy and Landscape Analysis; Springer: Berlin/Heidelberg, Germany, 2022; pp. 31–55. [Google Scholar]
- Ledmi, A.; Bendjenna, H.; Hemam, S.M. Fault tolerance in distributed systems: A survey. In Proceedings of the 2018 3rd International Conference on Pattern Analysis and Intelligent Systems (PAIS), Tebessa, Algeria, 24–25 October 2018; pp. 1–5. [Google Scholar]
- Zañudo, J.G.T.; Yang, G.; Albert, R. Structure-based control of complex networks with nonlinear dynamics. Proc. Natl. Acad. Sci. USA 2017, 114, 7234–7239. [Google Scholar] [CrossRef]
- Gu, H.; Liu, P.; Lü, J.; Lin, Z. PID control for synchronization of complex dynamical networks with directed topologies. IEEE Trans. Cybern. 2021, 51, 1334–1346. [Google Scholar] [CrossRef]
- Alejandro, J.; Arce, A.; Bordons, C. An integrated framework for distributed model predictive control of large-scale power networks. IEEE Trans. Ind. Inform. 2013, 10, 197–209. [Google Scholar]
- Klickstein, I.; Shirin, A.; Sorrentino, F. Energy scaling of targeted optimal control of complex networks. Nat. Commun. 2017, 8, 15145. [Google Scholar] [CrossRef]
- Chen, G. Pinning control and synchronization on complex dynamical networks. Int. J. Control Autom. Syst. 2014, 12, 221–230. [Google Scholar] [CrossRef]
- Huang, W.; Sun, H.; He, W. Pinning control of complex networks with general topology. In Proceedings of the IEEE ICCA 2010, Xiamen, China, 9–11 June 2010; pp. 360–364. [Google Scholar]
- Zhang, X.; Wang, H.; Lv, T. Efficient target control of complex networks based on preferential matching. PLoS ONE 2017, 12, e0175375. [Google Scholar] [CrossRef] [PubMed]
- Gao, J.; Liu, Y.Y.; D’souza, R.M.; Barabási, A.L. Target control of complex networks. Nat. Commun. 2014, 5, 5415. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Tang, P.; Chen, X.; Xiao, G.; Meng, M.; Ma, C.; Shi, L. Target control and expandable target control of complex networks. J. Frankl. Inst. 2020, 357, 3541–3564. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Tang, P.; Xiao, G.; Wen, C.; Shi, L. Target control of directed networks based on network flow problems. IEEE Trans. Control Netw. Syst. 2019, 7, 673–685. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Slotine, J.J.; Barabási, A.L. Controllability of complex networks. Nature 2011, 473, 167–173. [Google Scholar] [CrossRef]
- Wang, L.; Wang, L.; Kong, Z. Two controllable canonical forms for single input complex network. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 1467–1472. [Google Scholar]
- Mousavi, S.S.; Haeri, M.; Mesbahi, M. On the structural and strong structural controllability of undirected networks. IEEE Trans. Autom. Control 2017, 63, 2234–2241. [Google Scholar] [CrossRef]
- Menara, T.; Bassett, D.S.; Pasqualetti, F. Structural controllability of symmetric networks. IEEE Trans. Autom. Control 2018, 64, 3740–3747. [Google Scholar] [CrossRef]
- Yuan, Z.; Zhao, C.; Di, Z.; Wang, W.X.; Lai, Y.C. Exact controllability of complex networks. Nat. Commun. 2013, 4, 2447. [Google Scholar] [CrossRef]
- Fatemi, M.; Setoodeh, P.; Haykin, S. Observability of stochastic complex networks under the supervision of cognitive dynamic systems. J. Complex Netw. 2017, 5, 433–460. [Google Scholar] [CrossRef]
- Leitold, D.; Vathy-Fogarassy, Á.; Abonyi, J. Controllability and observability in complex networks—The effect of connection types. Sci. Rep. 2017, 7, 151. [Google Scholar] [CrossRef] [PubMed]
- Menck, P.J.; Heitzig, J.; Marwan, N.; Kurths, J. How basin stability complements the linear-stability paradigm. Nat. Phys. 2013, 9, 89–92. [Google Scholar] [CrossRef]
- Safar, M.H.; Sorkhoh, I.Y.; Farahat, H.M.; Mahdi, K.A. On maximizing the entropy of complex networks. Procedia Comput. Sci. 2011, 5, 480–488. [Google Scholar] [CrossRef]
- Jiang, Y.; Hu, A.; Song, Y. The evaluation of complex networks’ robustness based on entropy measure. In Proceedings of the 2014 Communications Security Conference (CSC 2014), Beijing, China, 22–24 May 2014; pp. 1–5. [Google Scholar]
- Weilenmann, M.; Kraemer, L.; Faist, P.; Renner, R. Axiomatic relation between thermodynamic and information-theoretic entropies. Phys. Rev. Lett. 2016, 117, 260601. [Google Scholar] [CrossRef] [PubMed]
- Guo, C.; Yang, L.; Chen, X.; Chen, D.; Gao, H.; Ma, J. Influential nodes identification in complex networks via information entropy. Entropy 2020, 22, 242. [Google Scholar] [CrossRef] [PubMed]
- Song, C.; Qu, Z.; Blumm, N.; Barabási, A.L. Limits of predictability in human mobility. Science 2010, 327, 1018–1021. [Google Scholar] [CrossRef]
- Banfalvi, G. Cell Cycle Synchronization; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Fell, J.; Axmacher, N. The role of phase synchronization in memory processes. Nat. Rev. Neurosci. 2011, 12, 105–118. [Google Scholar] [CrossRef]
- Lawande, Q.V.; Maiti, N. Role of Nonlinear Dynamics and Chaos in Applied Sciences; Technical Report; Bhabha Atomic Research Centre: Mumbai, India, 2000; Available online: https://inis.iaea.org/search/search.aspx?orig_q=RN:31049284 (accessed on 12 January 2022).
- Dhillon, G.S.; Ward, J. Chaos theory as a framework for studying information systems. In Advanced Topics in Information Resources Management; IGI Global: Hershey, PA, USA, 2003; Volume 2, pp. 320–337. [Google Scholar]
- Zhang, X.; Zhu, Y.; Zhao, Y. Altering control modes of complex networks by reversing edges. Phys. A Stat. Mech. Its Appl. 2021, 561, 125249. [Google Scholar] [CrossRef]
- Jia, T.; Liu, Y.Y.; Csóka, E.; Pósfai, M.; Slotine, J.J.; Barabási, A.L. Emergence of bimodality in controlling complex networks. Nat. Commun. 2013, 4, 2002. [Google Scholar] [CrossRef]
- Liu, X.; Chen, T. Synchronization of nonlinear coupled networks via aperiodically intermittent pinning control. IEEE Trans. Neural Netw. Learn. Syst. 2014, 26, 113–126. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821. [Google Scholar] [CrossRef] [PubMed]
- Yu, W.; Chen, G.; Lü, J. On pinning synchronization of complex dynamical networks. Automatica 2009, 45, 429–435. [Google Scholar] [CrossRef]
- Diwadkar, A.; Vaidya, U. Synchronization in large-scale nonlinear network systems with uncertain links. Automatica 2019, 100, 194–199. [Google Scholar] [CrossRef]
- Lu, J.; Chen, G. A time-varying complex dynamical network model and its controlled synchronization criteria. IEEE Trans. Autom. Control 2005, 50, 841–846. [Google Scholar]
- Chen, M. Chaos synchronization in complex networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2008, 55, 1335–1346. [Google Scholar] [CrossRef]
- Mai, X.H.; Zhang, B.; Luo, X.S.; Wei, D.Q. Controlling chaos in complex motor networks by environment. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 603–607. [Google Scholar] [CrossRef]
- De Wolf, T.; Holvoet, T. Emergence versus self-organisation: Different concepts but promising when combined. In Proceedings of the International Workshop on Engineering Self-Organising Applications, New York, NY, USA, 20 July 2004; pp. 1–15. [Google Scholar]
- O’Toole, E.; Nallur, V.; Clarke, S. Towards decentralised detection of emergence in complex adaptive systems. In Proceedings of the 2014 IEEE Eighth International Conference on Self-Adaptive and Self-Organizing Systems, London, UK, 8–12 September 2014; pp. 60–69. [Google Scholar]
- Fonseca, S.T.; Souza, T.R.; Verhagen, E.; Van Emmerik, R.; Bittencourt, N.F.; Mendonça, L.D.; Andrade, A.G.; Resende, R.A.; Ocarino, J.M. Sports injury forecasting and complexity: A synergetic approach. Sports Med. 2020, 50, 1757–1770. [Google Scholar] [CrossRef]
- Miconi, T.; McKinstry, J.L.; Edelman, G.M. Spontaneous emergence of fast attractor dynamics in a model of developing primary visual cortex. Nat. Commun. 2016, 7, 13208. [Google Scholar] [CrossRef]
- Keller, E.F. Organisms, machines, and thunderstorms: A history of self-organization, part two. Complexity, emergence, and stable attractors. Hist. Stud. Nat. Sci. 2009, 39, 1–31. [Google Scholar] [CrossRef]
- Kondepudi, D.K.; De Bari, B.; Dixon, J.A. Dissipative structures, organisms and evolution. Entropy 2020, 22, 1305. [Google Scholar] [CrossRef]
- Giammarco, K. Practical modeling concepts for engineering emergence in systems of systems. In Proceedings of the 2017 12th System of Systems Engineering Conference (SoSE), Waikoloa, HI, USA, 18–21 June 2017; pp. 1–6. [Google Scholar]
- Mittal, S.; Rainey, L. Harnessing emergence: The control and design of emergent behavior in system of systems engineering. In Proceedings of the Conference on Summer Computer Simulation, Chicago, IL, USA, 26–29 July 2015; pp. 1–10. [Google Scholar]
- Espín-Sarzosa, D.; Palma-Behnke, R.; Núñez-Mata, O. Energy management systems for microgrids: Main existing trends in centralized control architectures. Energies 2020, 13, 547. [Google Scholar] [CrossRef]
- Jogwar, S.S.; Daoutidis, P. Community-based synthesis of distributed control architectures for integrated process networks. Chem. Eng. Sci. 2017, 172, 434–443. [Google Scholar] [CrossRef]
- Zou, J.; Chang, Q.; Arinez, J.; Xiao, G. Data-driven modeling and real-time distributed control for energy efficient manufacturing systems. Energy 2017, 127, 247–257. [Google Scholar] [CrossRef]
- Meissner, H.; Ilsen, R.; Aurich, J.C. Analysis of control architectures in the context of Industry 4.0. Procedia Cirp 2017, 62, 165–169. [Google Scholar] [CrossRef]
- Dragicevic, T.; Wu, D.; Shafiee, Q.; Meng, L. Distributed and decentralized control architectures for converter-interfaced microgrids. Chin. J. Electr. Eng. 2017, 3, 41–52. [Google Scholar]
- Patrascu, M.; Ion, A.; Constantinescu, V. Agent based simulation applied to the design of control systems for emergency vehicles access. In Proceedings of the 2015 14th International Conference on ITS Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015; pp. 50–54. [Google Scholar]
- Elliott, C.M. Distributed multi-agent systems-a literature survey and inquisitive discussion. In Proceedings of the 2014 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014; pp. 1–7. [Google Scholar]
- Carli, R.; Dotoli, M. Decentralized control for residential energy management of a smart users’ microgrid with renewable energy exchange. IEEE/CAA J. Autom. Sin. 2019, 6, 641–656. [Google Scholar] [CrossRef]
- Srinivasan, D.; Choy, M. Hybrid multi-agent systems. In Innovations in Multi-Agent Systems and Applications-1; Springer: Berlin/Heidelberg, Germany, 2010; pp. 29–42. [Google Scholar]
- Hannebauer, M. Autonomous Dynamic Reconfiguration in Multi-Agent Systems: Improving the Quality and Efficiency of Collaborative Problem Solving; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2427. [Google Scholar]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef]
- Sabău, Ş.; Sperilă, A.; Oară, C.; Jadbabaie, A. Network Realization Functions for Optimal Distributed Control. arXiv 2021, arXiv:2112.09093. [Google Scholar]
- Hui, Q.; Haddad, W.M. Distributed nonlinear control algorithms for network consensus. Automatica 2008, 44, 2375–2381. [Google Scholar] [CrossRef]
- Münz, U.; Papachristodoulou, A.; Allgöwer, F. Delay robustness in consensus problems. Automatica 2010, 46, 1252–1265. [Google Scholar] [CrossRef]
- Carli, R.; Cavone, G.; Epicoco, N.; Di Ferdinando, M.; Scarabaggio, P.; Dotoli, M. Consensus-Based Algorithms for Controlling Swarms of Unmanned Aerial Vehicles. In Proceedings of the International Conference on Ad-Hoc Networks and Wireless, Bari, Italy, 19–21 October 2020; pp. 84–99. [Google Scholar]
- Amirkhani, A.; Barshooi, A.H. Consensus in multi-agent systems: A review. Artif. Intell. Rev. 2021, 1–39. [Google Scholar] [CrossRef]
- Lancichinetti, A.; Fortunato, S. Consensus clustering in complex networks. Sci. Rep. 2012, 2, 336. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Sundaram, S. Robustness of complex networks with implications for consensus and contagion. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 3426–3432. [Google Scholar]
- Su, H.; Wu, H.; Chen, X.; Chen, M.Z. Positive edge consensus of complex networks. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 2242–2250. [Google Scholar] [CrossRef]
- Tan, S.; Lu, J.; Lin, Z. Emerging behavioral consensus of evolutionary dynamics on complex networks. SIAM J. Control Optim. 2016, 54, 3258–3272. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Chen, G.; Huang, L. Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Trans. Circuits Syst. I Regul. Pap. 2009, 57, 213–224. [Google Scholar]
- Homs-Dones, M.; Devriendt, K.; Lambiotte, R. Nonlinear consensus on networks: Equilibria, effective resistance, and trees of motifs. SIAM J. Appl. Dyn. Syst. 2021, 20, 1544–1570. [Google Scholar] [CrossRef]
- Shang, Y. A system model of three-body interactions in complex networks: Consensus and conservation. Proc. R. Soc. A Math. Phys. Eng. Sci. 2022, 478. [Google Scholar] [CrossRef]
- Liang, K.; He, W. Secure Consensus Control of Two-timescale Networks Subject to Sequential Scaling Attacks. In Proceedings of the IECON 2021–47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–6. [Google Scholar]
- Ye, D.; Zhang, M.; Vasilakos, A.V. A survey of self-organization mechanisms in multiagent systems. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 441–461. [Google Scholar] [CrossRef]
- Hrabia, C.E.; Lützenberger, M.; Albayrak, S. Towards adaptive multi-robot systems: Self-organization and self-adaptation. Knowl. Eng. Rev. 2018, 33, 1–24. [Google Scholar] [CrossRef]
- Niazi, M.; Hussain, A. Agent-based tools for modeling and simulation of self-organization in peer-to-peer, ad hoc, and other complex networks. IEEE Commun. Mag. 2009, 47, 166–173. [Google Scholar] [CrossRef]
- Song, C.; Havlin, S.; Makse, H.A. Self-similarity of complex networks. Nature 2005, 433, 392–395. [Google Scholar] [CrossRef] [PubMed]
- Caldarelli, G.; Garlaschelli, D. Self-organization and complex networks. In Adaptive Networks; Springer: Berlin/Heidelberg, Germany, 2009; pp. 107–135. [Google Scholar]
- Fei, C.; Zeng-Qiang, C.; Zhu-Zhi, Y. A realistic model for complex networks with local interaction, self-organization and order. Chin. Phys. 2007, 16, 287. [Google Scholar] [CrossRef]
- Aoki, T.; Yawata, K.; Aoyagi, T. Self-organization of complex networks as a dynamical system. Phys. Rev. E 2015, 91, 012908. [Google Scholar] [CrossRef] [PubMed]
- Schlotterbeck, G.; Raievsky, C.; Lefevre, L. Decentralized estimation of forest fire spread using reactive and cognitive mobile sensors. Nat. Comput. 2018, 17, 537–551. [Google Scholar] [CrossRef]
- Asaamoning, G.; Mendes, P.; Rosário, D.; Cerqueira, E. Drone Swarms as Networked Control Systems by Integration of Networking and Computing. Sensors 2021, 21, 2642. [Google Scholar] [CrossRef]
- Gates, A.J.; Rocha, L.M. Control of complex networks requires both structure and dynamics. Sci. Rep. 2016, 6, 24456. [Google Scholar] [CrossRef]
- Mahmoodi, K.; West, B.J.; Grigolini, P. Self-organizing complex networks: Individual versus global rules. Front. Physiol. 2017, 8, 478. [Google Scholar] [CrossRef]
- Silva, C.J.; Cantin, G. Synchronization and self-organization in complex networks for a tuberculosis model. Math. Comput. Sci. 2021, 15, 107–120. [Google Scholar] [CrossRef]
- Bakule, L.; Rehák, B.; Papík, M. Decentralized H-infinity control of complex systems with delayed feedback. Automatica 2016, 67, 127–131. [Google Scholar] [CrossRef]
- Vaccarini, M.; Longhi, S.; Katebi, M.R. Unconstrained networked decentralized model predictive control. J. Process Control 2009, 19, 328–339. [Google Scholar] [CrossRef]
- Sandou, G.; Font, S.; Tebbani, S.; Hiret, A.; Mondon, C.; Tebbani, S.; Hiret, A.; Mondon, C. Predictive control of a complex district heating network. In Proceedings of the IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; Volume 44, p. 7372. [Google Scholar]
- Bianchi, D.; Borri, A.; Di Benedetto, M.D.; Ferrara, A. Decentralized model predictive control of freeway traffic systems over lossy communication networks. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 1074–1079. [Google Scholar]
- Lin, S.; De Schutter, B.; Xi, Y.; Hellendoorn, H. Efficient network-wide model-based predictive control for urban traffic networks. Transp. Res. Part C Emerg. Technol. 2012, 24, 122–140. [Google Scholar] [CrossRef]
- Li, A.; Sun, J. Stability of nonlinear system under distributed Lyapunov-based economic model predictive control with time-delay. ISA Trans. 2020, 99, 148–153. [Google Scholar] [CrossRef] [PubMed]
- Ocampo-Martinez, C.; Puig, V.; Cembrano, G.; Quevedo, J. Application of predictive control strategies to the management of complex networks in the urban water cycle [applications of control]. IEEE Control Syst. Mag. 2013, 33, 15–41. [Google Scholar]
- Barcelli, D.; Ocampo-Martinez, C.; Puig, V.; Bemporad, A. Decentralized model predictive control of drinking water networks using an automatic subsystem decomposition approach. IFAC Proc. Vol. 2010, 43, 572–577. [Google Scholar] [CrossRef]
- Fu, D.; Ionescu, C.M.; Aghezzaf, E.H.; De Keyser, R. Decentralized and centralized model predictive control to reduce the bullwhip effect in supply chain management. Comput. Ind. Eng. 2014, 73, 21–31. [Google Scholar] [CrossRef]
- Ion, A.; Patrascu, M. A Scalable Algorithm for Self-Organization in Event-Triggered Networked Control Systems. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 2725–2730. [Google Scholar]
- Ion, A.; Berceanu, C.; Patrascu, M. Applying agent based simulation to the design of traffic control systems with respect to real-world urban complexity. In Multi-Agent Systems and Agreement Technologies; Springer: Berlin/Heidelberg, Germany, 2015; pp. 395–409. [Google Scholar]
- Bertolotti, T. Generative and Demonstrative Experiments. In Model-Based Reasoning in Science and Technology; Springer: Berlin/Heidelberg, Germany, 2014; pp. 479–498. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
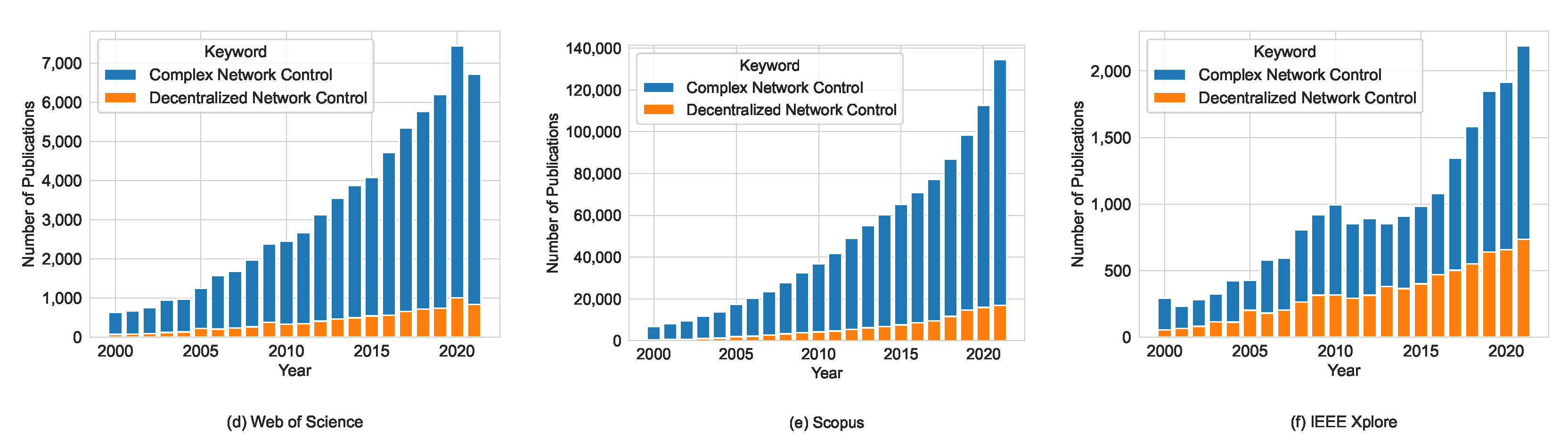
| Repository | Keyword | Query | Total Number of Publications |
|---|---|---|---|
| Web of Science | Network Science | ALL = (network science) | 1,562,859 |
| Complex Network | ALL = (complex network) | 316,545 | |
| Complex Network Control | ALL = (complex network control) | 68,768 | |
| Networked Control | ALL = (networked control) | 500,852 | |
| Decentralized Network Control | ALL = (decentralized network control) | 8846 | |
| Distributed Network Control | ALL = (distributed network control) | 62,227 | |
| Scopus | Network Science | ALL (network AND science) | 6,729,160 |
| Complex Network | ALL (complex AND network) | 2,019,945 | |
| Complex Network Control | ALL (complex AND network AND control) | 1,060,716 | |
| Networked Control | ALL (networked AND control) | 181,627 | |
| Decentralized Network Control | ALL (decentralized AND network AND control) | 129,084 | |
| Distributed Network Control | ALL (distributed AND network AND control) | 691,056 | |
| IEEEXplore | Network Science | (“All Metadata”: network science) | 335,426 |
| Complex Network | (“All Metadata”: complex network) | 72,199 | |
| Complex Network Control | (“All Metadata”: complex network control) | 20,326 | |
| Networked Control | (“All Metadata”: networked control) | 290,125 | |
| Decentralized Network Control | (“All Metadata”: decentralized network control) | 7209 | |
| Distributed Network Control | (“All Metadata”: distributed network control) | 50,630 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berceanu, C.; Pătrașcu, M. Engineering Emergence: A Survey on Control in the World of Complex Networks. Automation 2022, 3, 176-196. https://doi.org/10.3390/automation3010009
Berceanu C, Pătrașcu M. Engineering Emergence: A Survey on Control in the World of Complex Networks. Automation. 2022; 3(1):176-196. https://doi.org/10.3390/automation3010009
Chicago/Turabian StyleBerceanu, Cristian, and Monica Pătrașcu. 2022. "Engineering Emergence: A Survey on Control in the World of Complex Networks" Automation 3, no. 1: 176-196. https://doi.org/10.3390/automation3010009