
Modelling the Acoustic Propagation in a Test Section of a Cavitation Tunnel: Scattering Issues of the Acoustic Source

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Subtract the background noise of the facility when this noise could not be neglected;
- Represent the noise radiated by the model and not the facility;
- Represent, not the acoustic pressure at the position of the sensor, but the acoustic power radiated.
2. Acoustic Theories
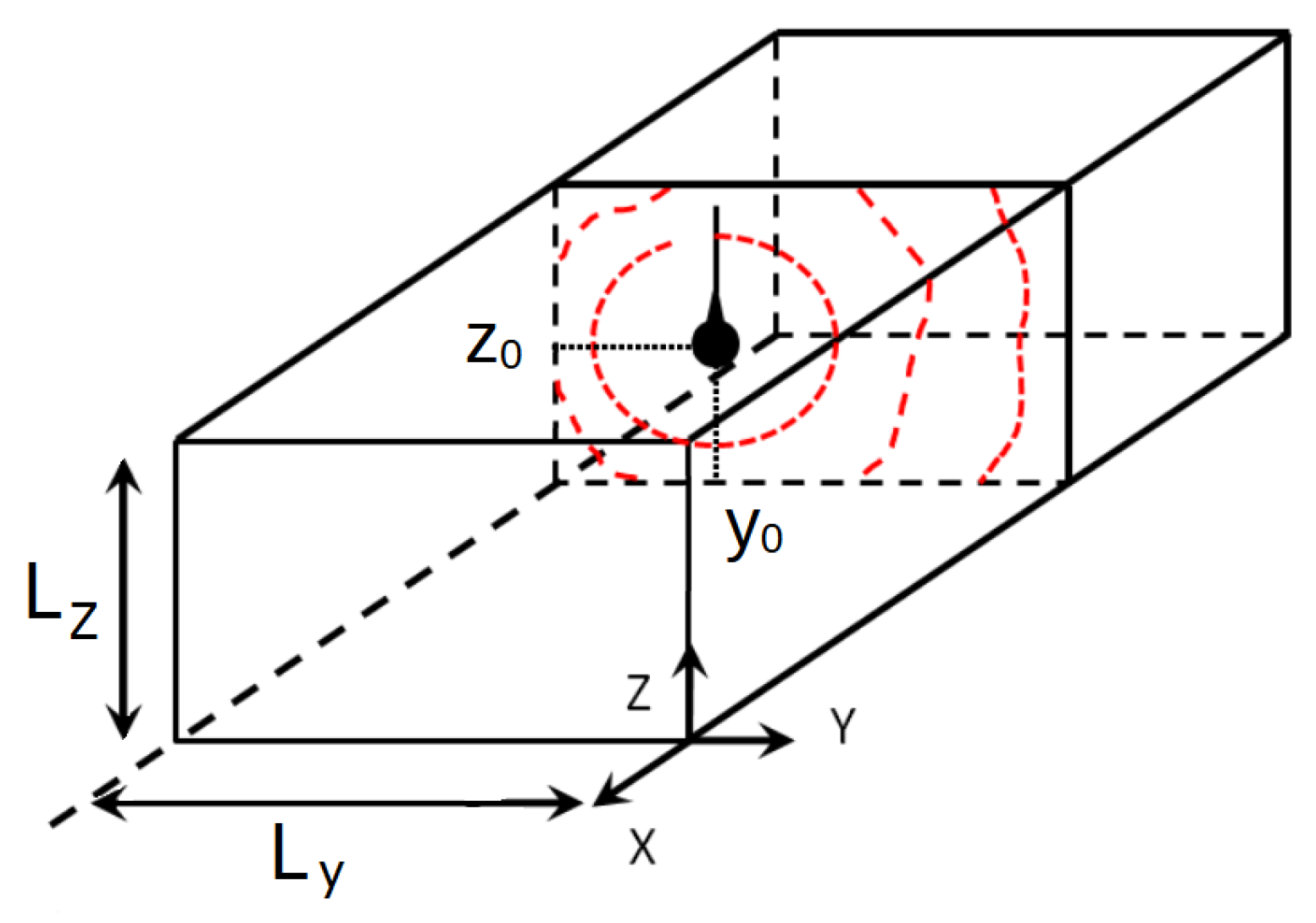
2.1. Modal Propagation in Duct
2.1.1. General Equations
2.1.2. Modal Magnitudes
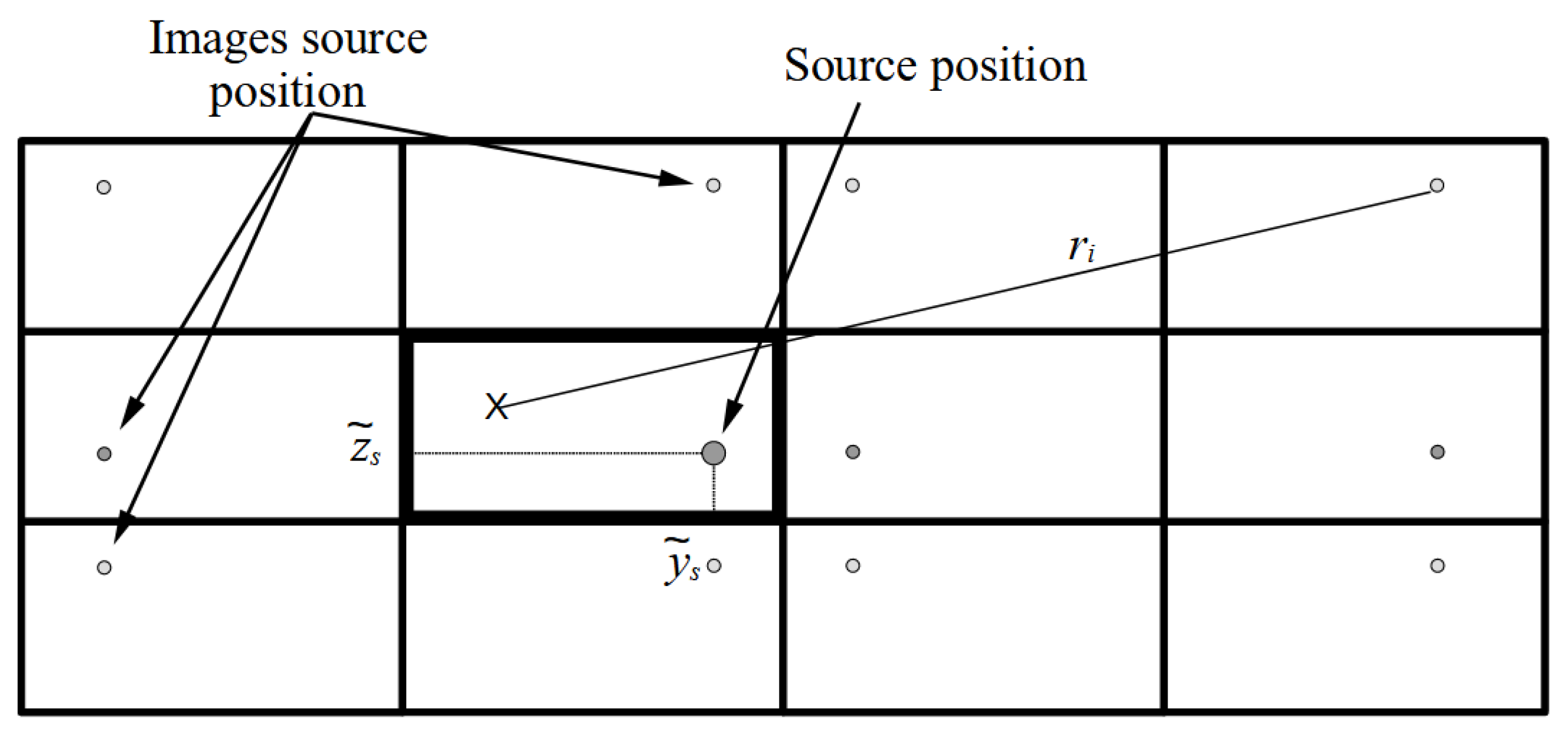
2.2. Image Sources Theory
- Computing the image sources locations from geometrical features, up to the order of ,
- Considering that each source is a monopole;
- Computing the contribution of each image source in agreement with wall characteristics (reflection laws);
- Adding all the contributions to obtain the global acoustic field.
2.3. Model Expressed in Spherical Tools
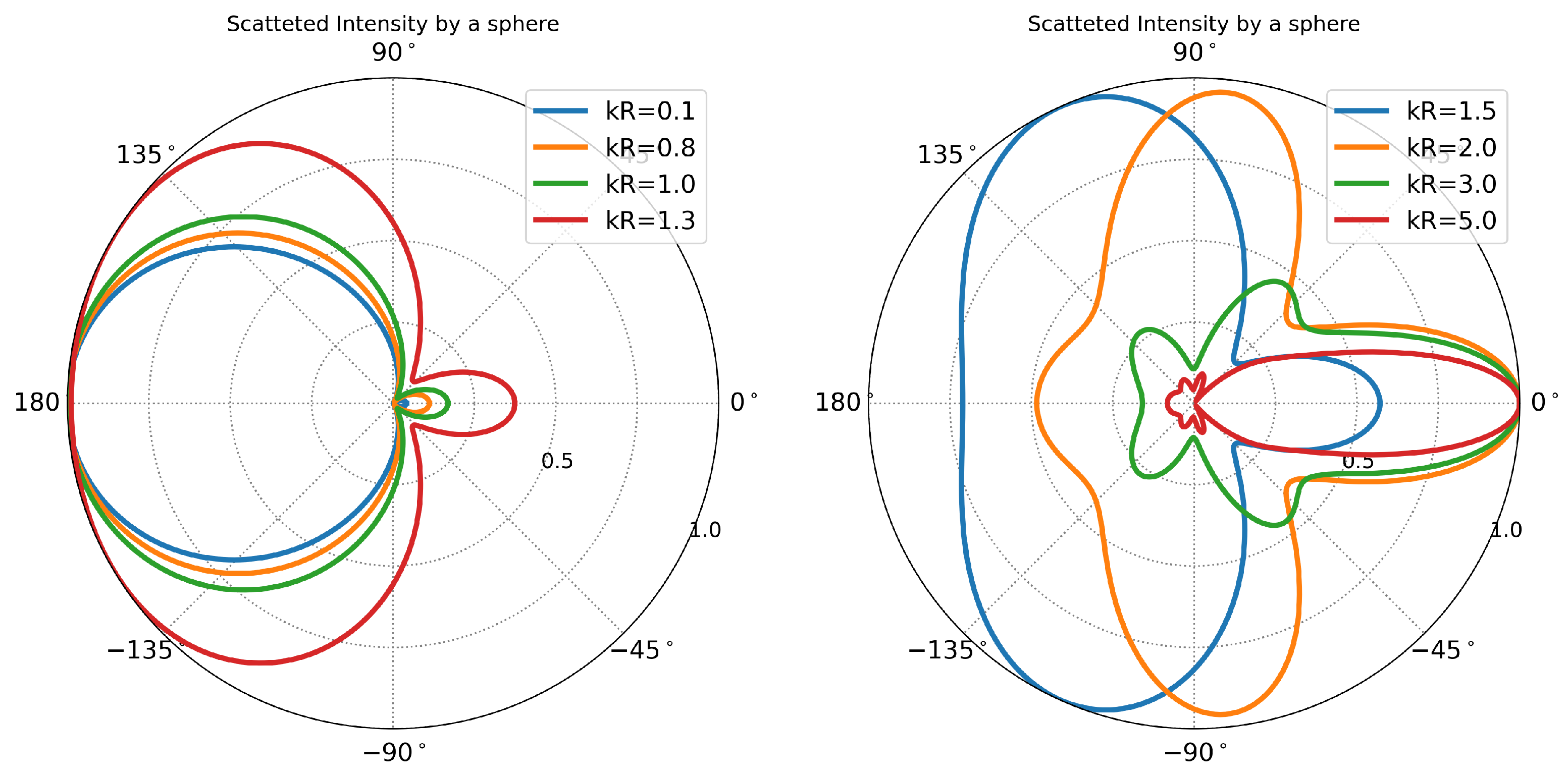
2.3.1. Scattering by a Sphere
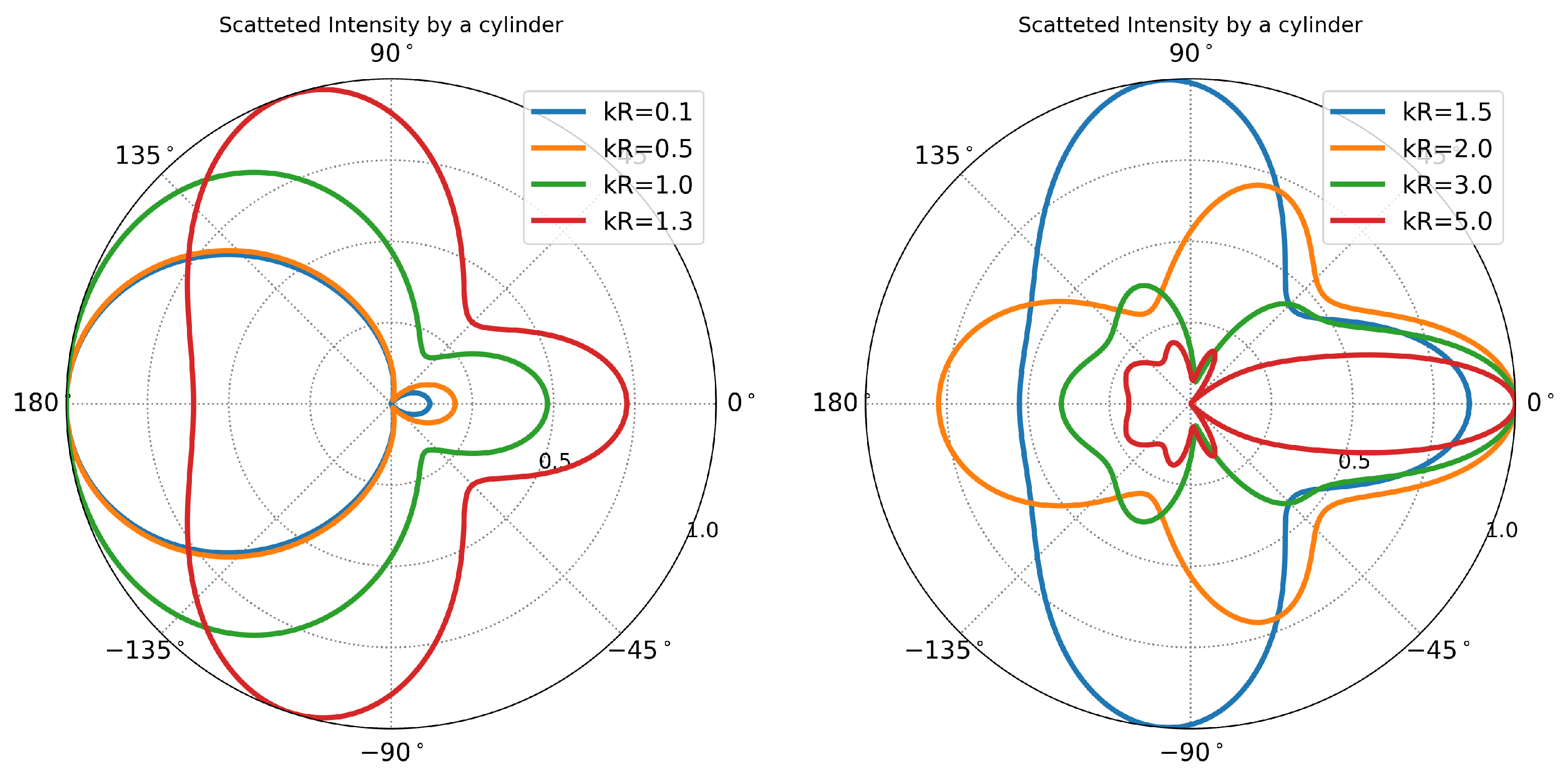
2.3.2. Scattering by a Cylinder
3. Results of Simulations
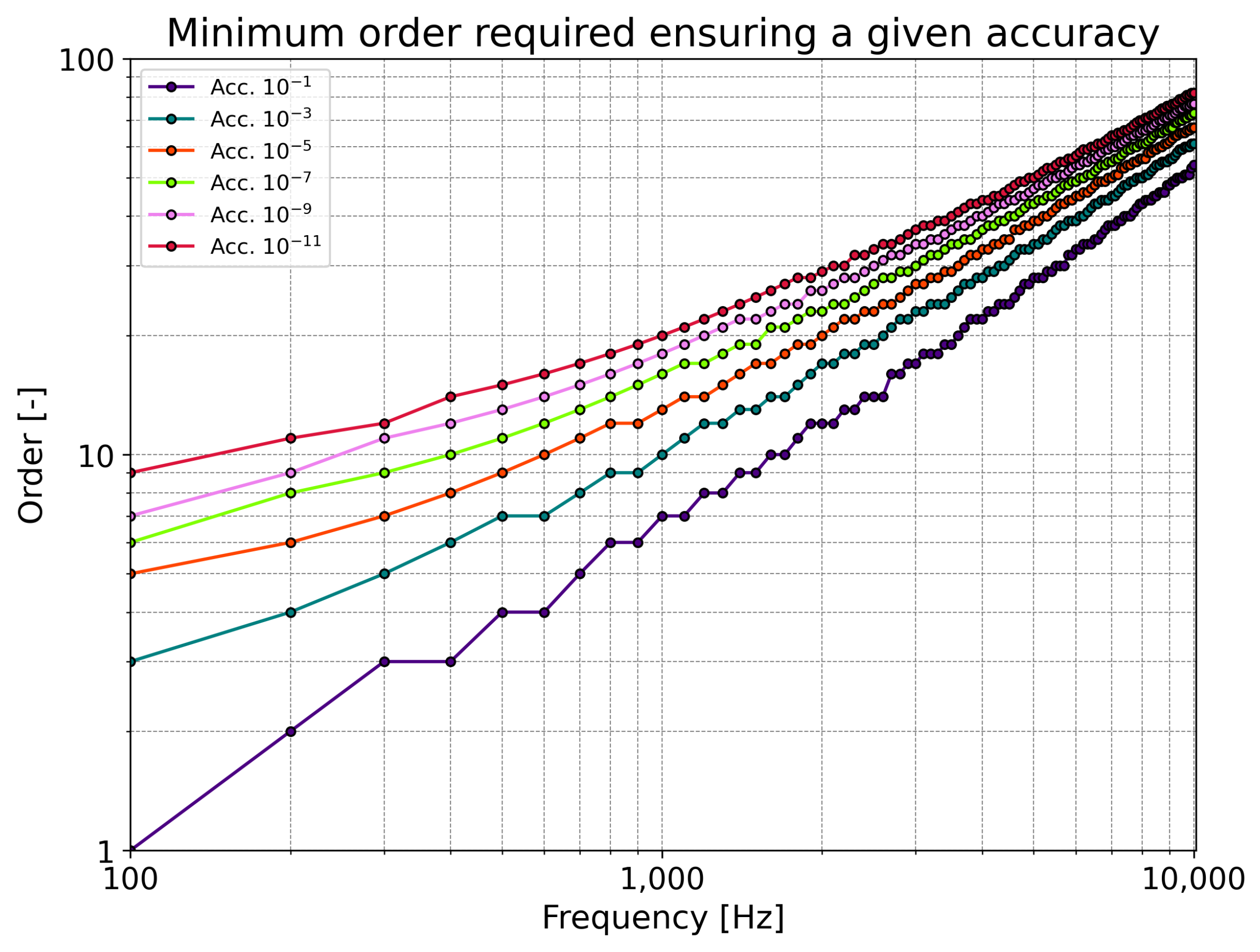
3.1. Assessment of the Accuracy for Spherical Bessel Functions’ Computation
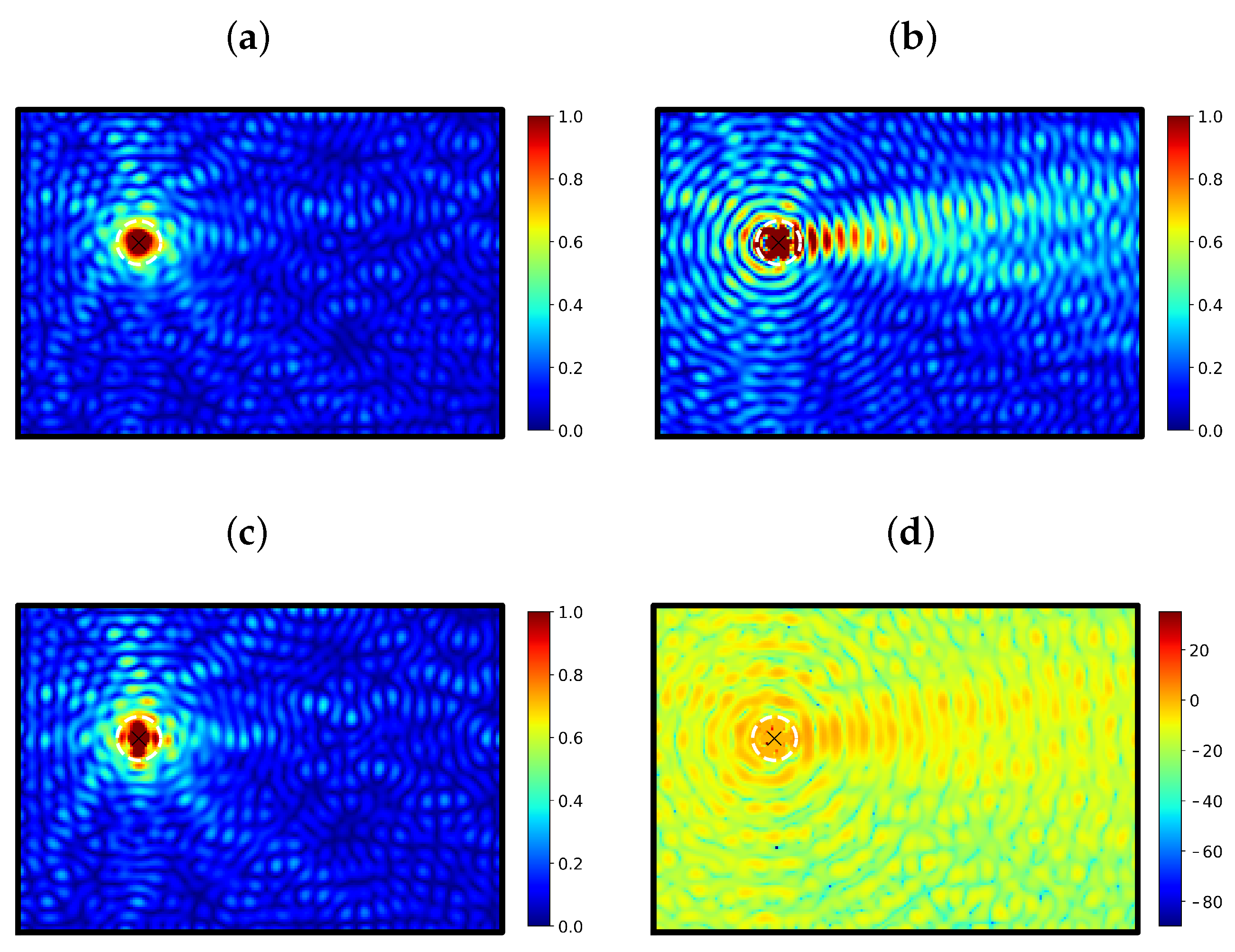
3.2. Spherical Case
3.3. Cylindrical Case
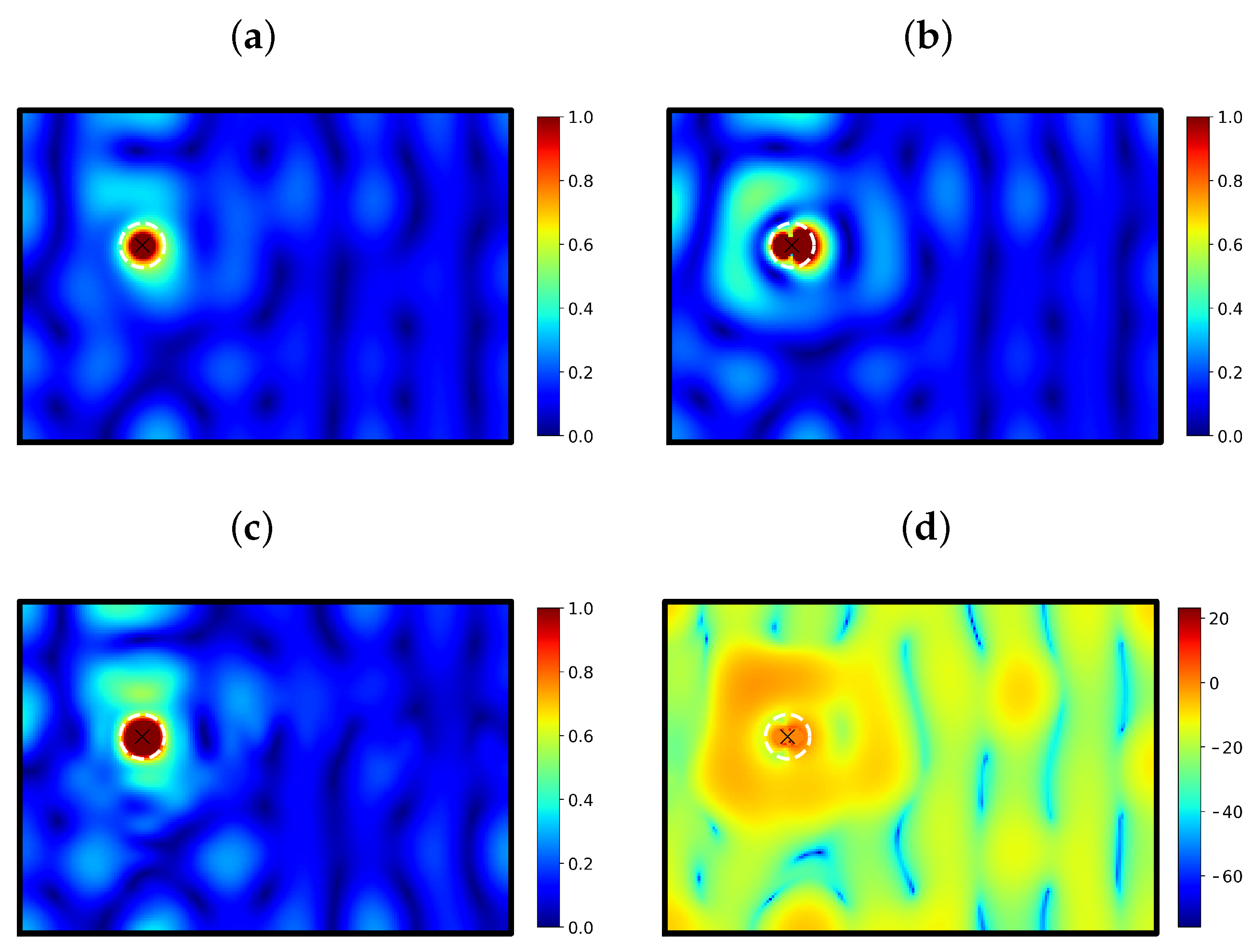
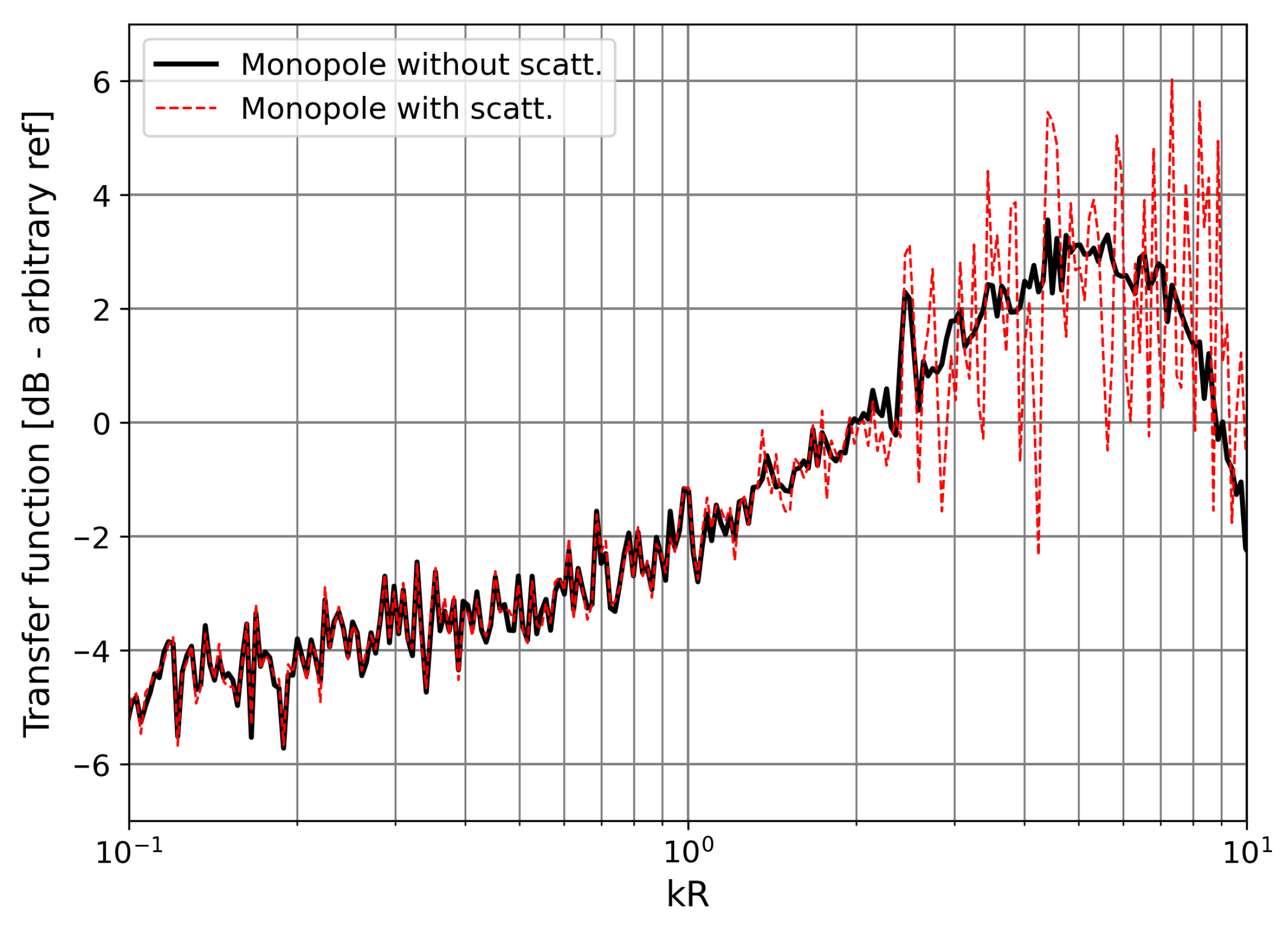
3.4. Consequences for Transfer Function Measurements
4. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Testa, C.; Ianniello, S.; Salvatore, F. FfowcsWilliams and Hawking formulation for hydroacoustic analysis of propeller sheet cavitation. J. Sound Vib. 2017, 413, 421–441. [Google Scholar] [CrossRef]
- ITTC. Guideline on Model-Scale Propeller Cavitation Noise Measurements; International Towing Tank Conference, 2021 September. Available online: http://ittc.info (accessed on 28 September 2023).
- Lafeber, F.H.; Bosschers, J.; de Jong, C.; Graafland, F. Acoustic reverberation measurements in the depressurised wave bassin. In Proceedings of the 4th International Conference on Advanced Model Measurement Technology for the Maritime Industry AMT15, Istanbul, Turkey, 28–30 September 2015. [Google Scholar]
- Tani, G.; Viviani, M.; Felli, M.; Lafeber, F.H.; Lloyd, T.; Aktas, B.; Atlar, M.; Turkmen, S.; Seol, H.; Hallander, J.; et al. Noise measurements of a cavitating propeller in different facilities: Results of the round robin test programme. Ocean Eng. 2020, 213, 107599. [Google Scholar] [CrossRef]
- Merchant, N.D.; Putland, R.L.; André, M.; Baudin, E.; Felli, M.; Slabbekoorn, H.; Dekeling, R. A decade of underwater noise research in support of the European Marine Strategy Framework Directive. Ocean Coast. Manag. 2022, 228, 106299. [Google Scholar] [CrossRef] [PubMed]
- Felli, M.; Grizzi, S.; Falchi, M. A novel approach for the isolation of the sound and pseudo-sound contributions from near- field pressure fluctuation measurements: Analysis of the hydroacoustic and hydrodynamic perturbation in a propeller-rudder system. Exp. Fluids 2014, 55, 1651. [Google Scholar] [CrossRef]
- Seol, H.; Jung, B.; Suh, J.-C.; Lee, S. Prediction of non-cavitating underwater propeller noise. J. Sound Vib. 2002, 257, 131–156. [Google Scholar] [CrossRef]
- Posa, A.; Felli, M.; Broglia, R. The signature of a propeller–rudder system: Acoustic analogy based on LES data. Ocean Eng. 2020, 259, 112059. [Google Scholar] [CrossRef]
- Abom, M. Modal decomposition in ducts based on transfer function measurements between microphone pairs. J. Sound Vib. 1989, 135, 95–114. [Google Scholar] [CrossRef]
- Dalmont, J.P. Acoustic impedance measurement, Part II: A new calibration method. J. Sound Vib. 2001, 243, 441–459. [Google Scholar] [CrossRef]
- Schultz, T.; Cattagesta, L.N.; Sheplak, M. Modal decomposition method for acoustic impedance testing in square ducts. J. Acoust. Soc. Am. 2006, 120, 3750–3758. [Google Scholar] [CrossRef] [PubMed]
- Boucheron, R. Analytical solution for modal acoustic propagation with laminar mean flow in 2D Cartesian geometry. In Proceedings of the 22nd International Congress on Acoustics, Buenos Aires, Argentina, 5–9 September 2016. [Google Scholar]
- Hynninen, A.; Tanttari, J.; Viitanen, V.M.; Sipilä, T. On predicting the sound from a cavitating marine propeller in a tunnel. In Proceedings of the 5th International Symposium on Marine Propulsors SMP’17, Espoo, Finland, 12–15 June 2017. [Google Scholar]
- Park, C.; Kim, G.; Park, Y.; Lee, K.; Seong, W. Noise Localization Method for Model Tests in a Large Cavitation Tunnel Using Hydrophone Array. Remote Sens. 2016, 8, 195. [Google Scholar] [CrossRef]
- Boucheron, R. Modal decomposition method in rectangular ducts in a test-section of a cavitation tunnel with a simultaneous estimate of the effective wall impedance. Ocean Eng. 2020, 209, 943–950. [Google Scholar] [CrossRef]
- Boucheron, R. About acoustic field characteristics in the test section of a cavitation tunnel. Ocean Eng. 2020, 211, 943–950. [Google Scholar] [CrossRef]
- Tani, G.; Viviani, M.; Ferrando, M.; Armelloni, E. Aspects of the measurement of the acoustic transfer function in a cavitation tunnel. Appl. Ocean Res. 2019, 87, 264–278. [Google Scholar] [CrossRef]
- Allen, J.B.; Berkley, D.A. Image method for efficiently simulating small-room acoustics. J. Acoust. Soc. Am. 1979, 65, 943–950. [Google Scholar] [CrossRef]
- Lehmann, E.A.; Johansson, A.M. Prediction of energy decay in room impulse responses simulated with an image-source model. J. Acoust. Soc. Am. 2008, 124, 269–277. [Google Scholar] [CrossRef] [PubMed]
- Boucheron, R. Localization of acoustic sources in water tunnel with a demodulation technique. Ocean Eng. 2023, 281, 114891. [Google Scholar] [CrossRef]
- Morse, P.M.; Ingard, K.U. Theoretical Acoustics; Princeton University Press: Princeton, NJ, USA, 1968. [Google Scholar]
- Bruneau, M. Manuel D’Acoustique Fondamental; Hermes: Paris, France, 1998. [Google Scholar]
- Munjal, M.L. Acoustics of Ducts and Mufflers, 2nd ed.; Wiley & Sons Ltd.: Hoboken, NJ, USA, 2014. [Google Scholar]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions; Dover Publications: Mineola, NY, USA, 1970. [Google Scholar]
- Coxson, G.; Hirschel, A.; Cohen, M. New results on minimum-psl binary codes. In Proceedings of the 2001 IEEE Radar Conference, Atlanta, GA, USA, 3 May 2001; pp. 153–156. [Google Scholar]
- Kerdock, A.M.; Mayer, R.; Bass, D. Longest binary pulse compression codes with given peak sidelobe levels. Proc. IEEE 1986, 74, 336. [Google Scholar] [CrossRef]
- Turyn, R. Sequences with Small Correlation. In Error Correcting Codes; Mann, H.B., Ed.; Wiley: New York, NY, USA, 1968; pp. 195–228. [Google Scholar]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boucheron, R. Modelling the Acoustic Propagation in a Test Section of a Cavitation Tunnel: Scattering Issues of the Acoustic Source. Modelling 2023, 4, 650-665. https://doi.org/10.3390/modelling4040037
Boucheron R. Modelling the Acoustic Propagation in a Test Section of a Cavitation Tunnel: Scattering Issues of the Acoustic Source. Modelling. 2023; 4(4):650-665. https://doi.org/10.3390/modelling4040037
Chicago/Turabian StyleBoucheron, Romuald. 2023. "Modelling the Acoustic Propagation in a Test Section of a Cavitation Tunnel: Scattering Issues of the Acoustic Source" Modelling 4, no. 4: 650-665. https://doi.org/10.3390/modelling4040037