On the Countering of Free Vibrations by Forcing: Part I—Non-Resonant and Resonant Forcing with Phase Shifts


Abstract
:1. Introduction
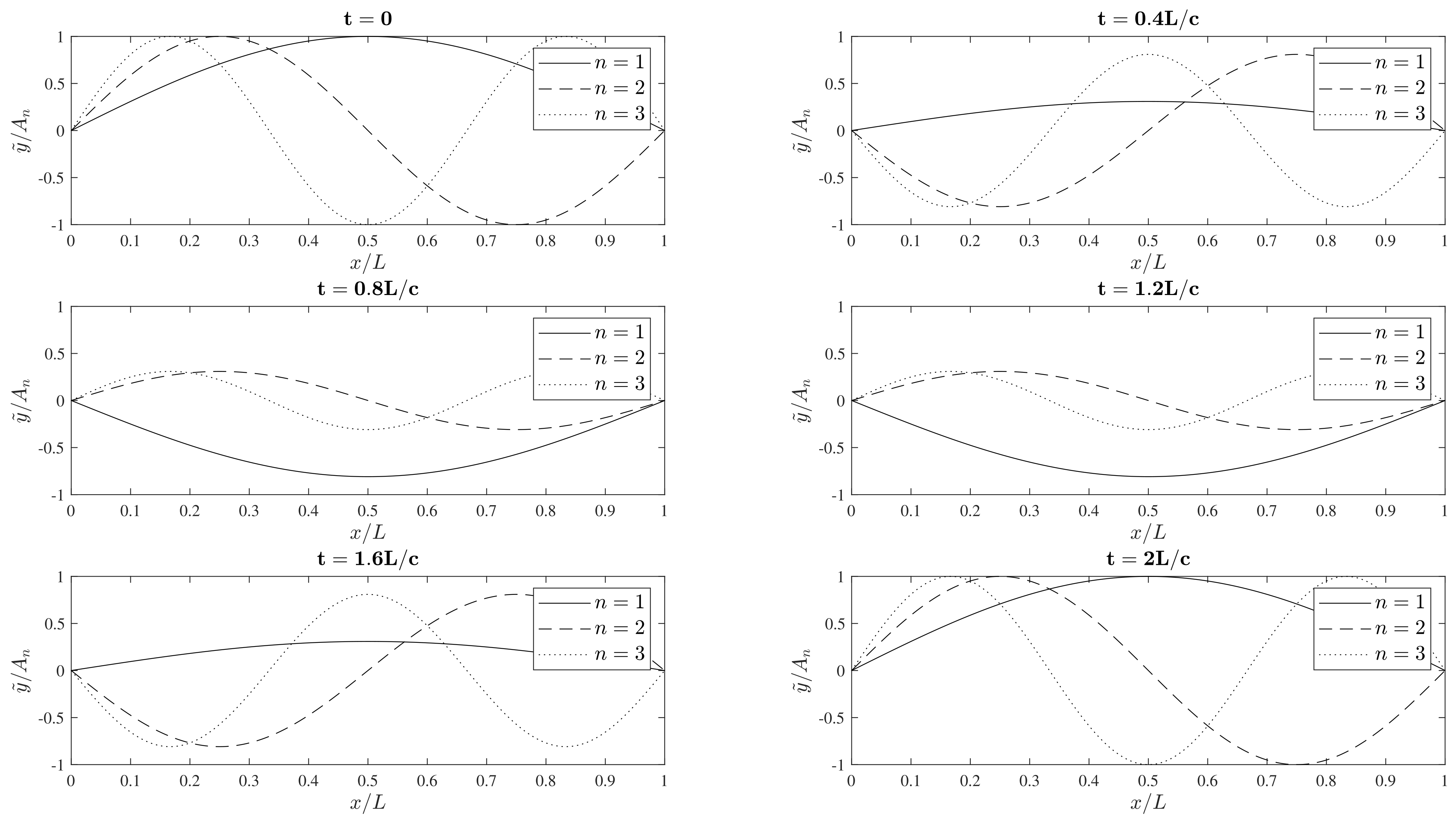
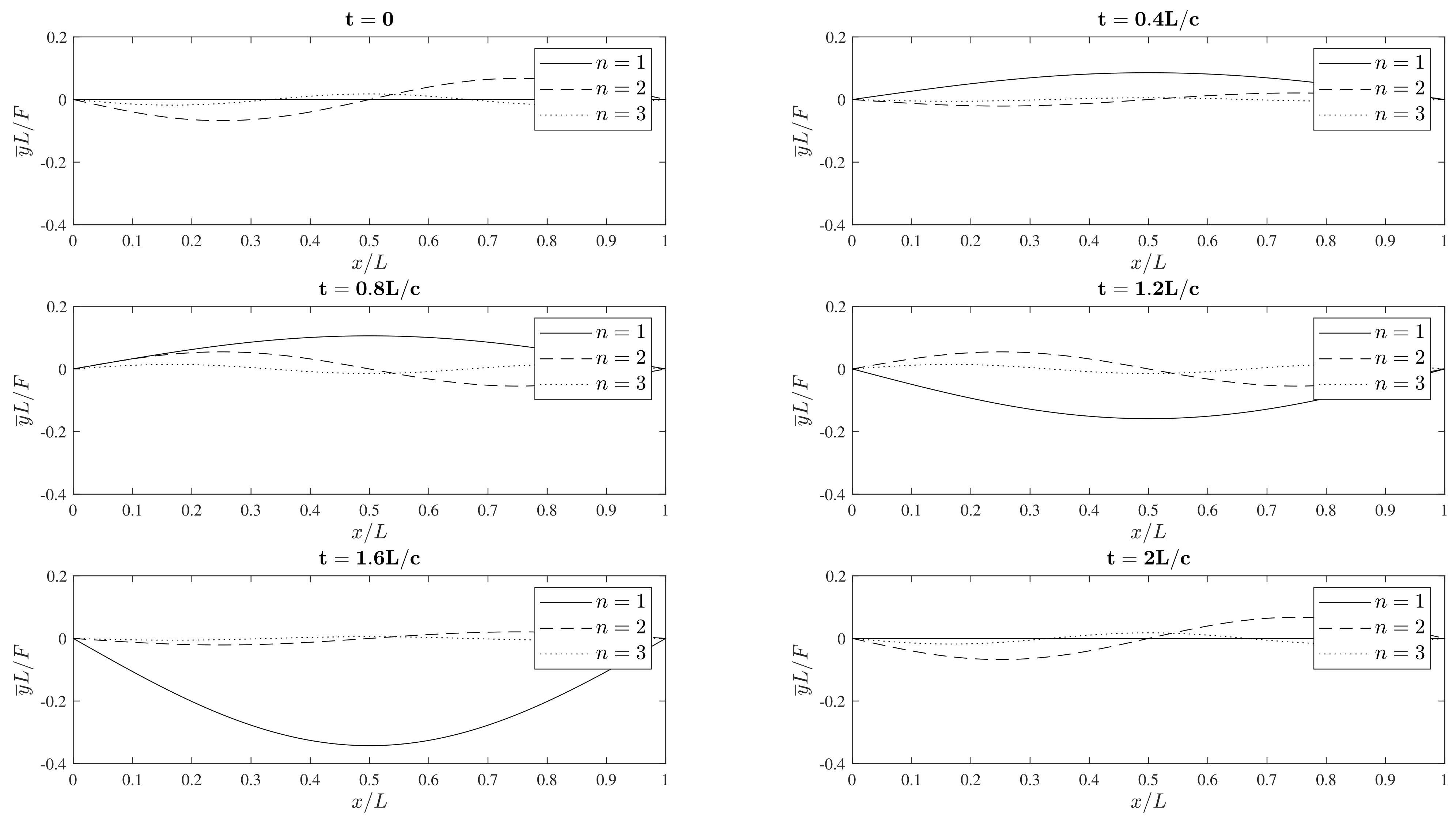
2. Free Oscillations and Forcing by Concentrated Force
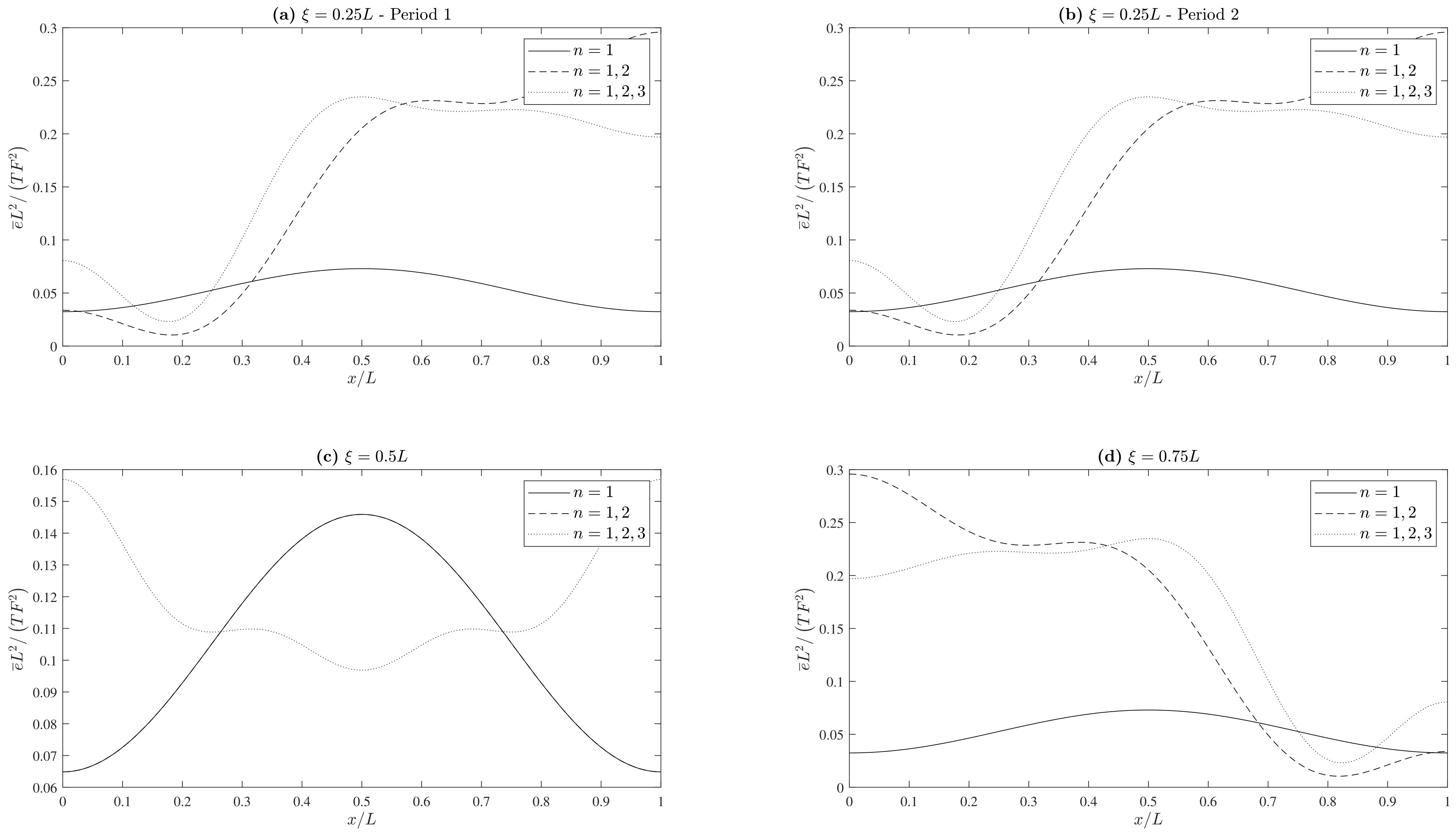
3. Minimization of Total (Kinetic Plus Elastic) Energy
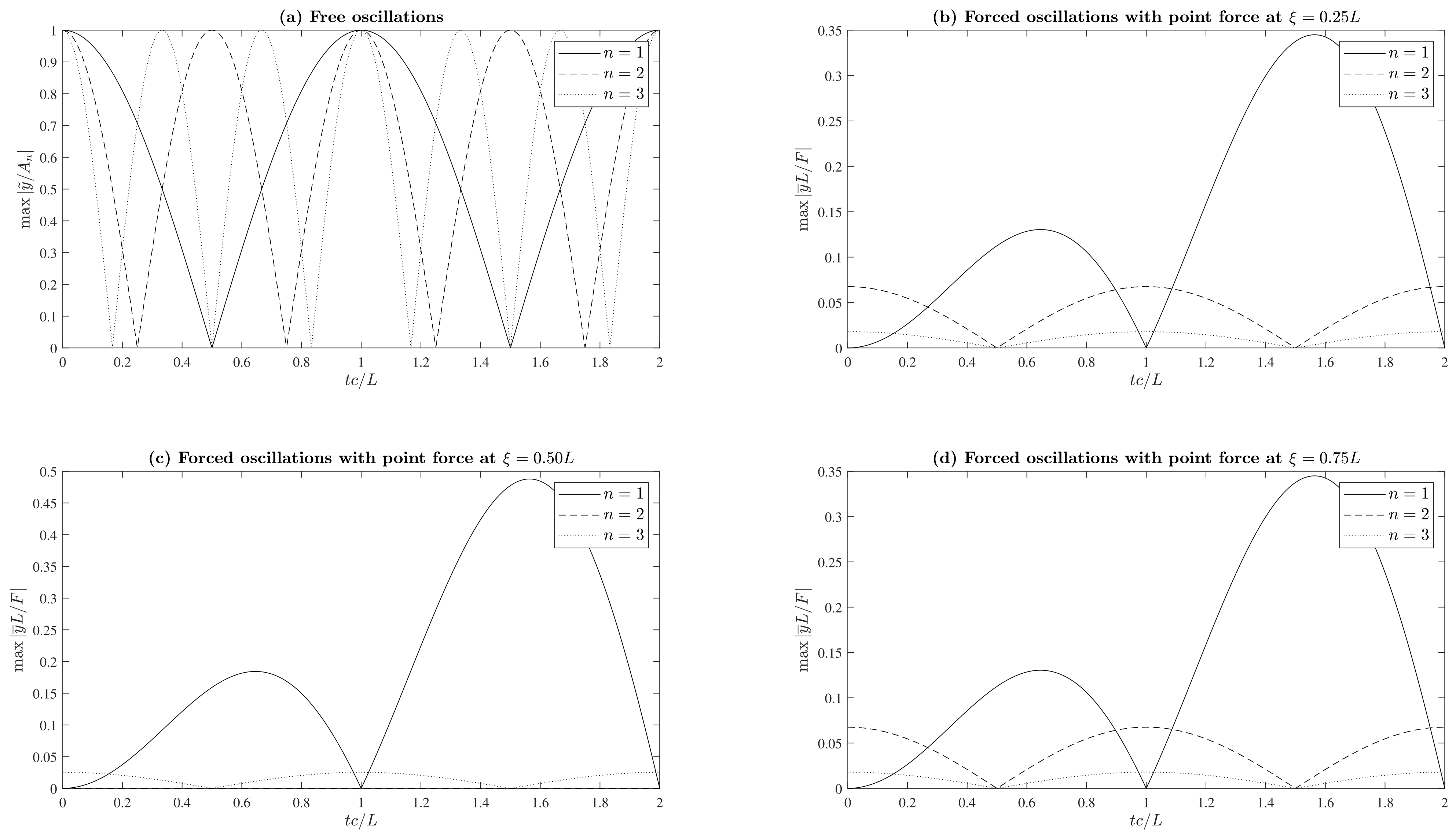
4. Optimization of Strength and Location of Forcing Effect
5. Oscillation and Energy for Optimal and Non-Optimal Forcing
6. Forcing by Multiple Concentrated Forces
7. Optimization of Continuously Distributed Forces
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Averages over a Period
References
- Strutt, J.W.; Lindsay, R.B. The Theory of Sound, 2nd ed.; Dover Publications, Inc.: New York, NY, USA, 1945; Volume 1–2. [Google Scholar]
- Morse, P.M.; Ingard, K.U. Theoretical Acoustics; International Series in Pure and Applied Physics; McGraw-Hill Book Company: New York, NY, USA, 1968. [Google Scholar]
- Pierce, A.D. Acoustics: An Introduction to Its Physical Principles and Applications, 3rd ed.; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Strutt, J.W. The Problem of the Whispering Gallery. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1910, 20, 1001–1004. [Google Scholar] [CrossRef] [Green Version]
- Lighthill, M.J. Waves in Fluids, 1st ed.; Cambridge University Press: Cambridge, UK, 1978. [Google Scholar]
- Campos, L.M.B.C. On waves in gases. Part I: Acoustics of jets, turbulence, and ducts. Rev. Mod. Phys. 1986, 58, 117–182. [Google Scholar] [CrossRef]
- Campos, L.M.B.C. On 36 Forms of the Acoustic Wave Equation in Potential Flows and Inhomogeneous Media. Appl. Mech. Rev. 2007, 60, 149–171. [Google Scholar] [CrossRef]
- Nelson, P.A.; Elliott, S.J. Active Control of Sound, 1st ed.; Academic Press: London, UK, 1992. [Google Scholar]
- Campos, L.M.B.C.; Lau, F.J.P. On Active Noise Reduction in a Cylindrical Duct with Flow. Int. J. Acoust. Vib. 2009, 14, 150–162. [Google Scholar] [CrossRef]
- Strutt, J.W. On the Propagation of Sound in narrow Tubes of variable section. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1916, 31, 89–96. [Google Scholar] [CrossRef]
- McLachlan, N.W. Loud Speakers: Theory, Performance, Testing and Design; Oxford Engineering Science Series; Clarendon Press: Oxford, UK, 1934. [Google Scholar]
- Campos, L.M.B.C. Simultaneous Differential Equations and Multi-Dimensional Vibrations, 1st ed.; Mathematics and Physics for Science and Technology; CRC Press: Boca Raton, FL, USA, 2019; Volume 4. [Google Scholar] [CrossRef]
- Webster, A.G. Acoustical Impedance, and the Theory of Horns and of the Phonograph. Proc. Natl. Acad. Sci. USA 1919, 5, 275–282. [Google Scholar] [CrossRef] [Green Version]
- Ballantine, S. On the propagation of sound in the general Bessel horn of infinite length. J. Frankl. Inst. 1927, 203, 85–102. [Google Scholar] [CrossRef]
- Olson, H.F. A Horn Consisting of Manifold Exponential Sections. J. Soc. Motion Pict. Eng. 1938, 30, 511–518. [Google Scholar] [CrossRef]
- Salmon, V. A New Family of Horns. J. Acoust. Soc. Am. 1946, 17, 212–218. [Google Scholar] [CrossRef]
- Weibel, E.S. On Webster’s Horn Equation. J. Acoust. Soc. Am. 1955, 27, 726–727. [Google Scholar] [CrossRef]
- Eisner, E. Complete Solutions of the “Webster” Horn Equation. J. Acoust. Soc. Am. 1967, 41, 1126–1146. [Google Scholar] [CrossRef]
- Bies, D.A. Tapering a Bar for Uniform Stress in Longitudinal Oscillation. J. Acoust. Soc. Am. 1962, 34, 1567–1569. [Google Scholar] [CrossRef]
- Pyle, R.W., Jr. Solid Torsional Horns. J. Acoust. Soc. Am. 1967, 41, 1147–1156. [Google Scholar] [CrossRef]
- Nagarkar, B.N.; Finch, R.D. Sinusoidal Horns. J. Acoust. Soc. Am. 1971, 50, 23–31. [Google Scholar] [CrossRef]
- Molloy, C. N-parameter ducts. J. Acoust. Soc. Am. 1975, 57, 1030–1035. [Google Scholar] [CrossRef]
- Campos, L.M.B.C. Some general properties of the exact acoustic fields in horns and baffles. J. Sound Vib. 1984, 95, 177–201. [Google Scholar] [CrossRef]
- Campos, L.M.B.C.; Santos, A.J.P. On the propagation and damping of longitudinal oscillations in tapered visco-elastic bars. J. Sound Vib. 1988, 126, 109–125. [Google Scholar] [CrossRef]
- Eisenberg, N.A.; Kao, T.W. Propagation of Sound through a Variable-Area Duct with a Steady Compressible Flow. J. Acoust. Soc. Am. 1971, 49, 169–175. [Google Scholar] [CrossRef]
- Lumsdaine, E.; Ragab, S. Effect of flow on quasi-one-dimensional acoustic wave propagation in a variable area duct of finite length. J. Sound Vib. 1977, 53, 47–61. [Google Scholar] [CrossRef]
- Campos, L.M.B.C. On the fundamental acoustic mode in variable area, low Mach number nozzles. Prog. Aerosp. Sci. 1985, 22, 1–27. [Google Scholar] [CrossRef]
- Campos, L.M.B.C. On the propagation of sound in nozzles of variable cross-section containing low Mach number mean flows. Z. Flugwiss. Weltraumforsch. 1984, 8, 97–109. [Google Scholar]
- Campos, L.M.B.C.; Lau, F.J.P. On sound in an inverse sinusoidal nozzle with low Mach number mean flow. J. Acoust. Soc. Am. 1996, 100, 355–363. [Google Scholar] [CrossRef]
- Campos, L.M.B.C.; Lau, F.J.P. On the acoustics of low Mach number bulged, throated and baffled nozzles. J. Sound Vib. 1996, 196, 611–633. [Google Scholar] [CrossRef]
- Campos, L.M.B.C.; Lau, F.J.P. On the convection of sound in inverse catenoidal nozzles. J. Sound Vib. 2001, 244, 195–209. [Google Scholar] [CrossRef]
- Cummings, A. Sound Transmission in Curved Duct Bends. J. Sound Vib. 1974, 35, 451–477. [Google Scholar]
- Rostafinski, W. Analysis of propagation of waves of acoustic frequencies in curved ducts. J. Acoust. Soc. Am. 1974, 56, 11–15. [Google Scholar] [CrossRef]
- Meyerand, M.K.; Mungur, P. Sound propagation in curved ducts. Prog. Astronaut. Aeronaut. 1976, 44, 347–362. [Google Scholar]
- Osborne, W.C. Higher mode propagation of sound in short curved bends of rectangular cross-section. J. Sound Vib. 1976, 45, 39–52. [Google Scholar] [CrossRef]
- Tam, C.K.W. A study of sound transmission in curved duct bends by the Galerkin method. J. Sound Vib. 1976, 45, 91–104. [Google Scholar] [CrossRef]
- Ko, S.H.; Ho, L.T. Sound attenuation in acoustically lined curved ducts in the absence of fluid flow. J. Sound Vib. 1977, 53, 189–201. [Google Scholar] [CrossRef]
- El-Raheb, M.; Wagner, P. Acoustic propagation in a rigid torus. J. Acoust. Soc. Am. 1982, 71, 1335–1346. [Google Scholar] [CrossRef]
- Keefe, D.H.; Benade, A.H. Wave propagation in strongly curved ducts. J. Acoust. Soc. Am. 1983, 74, 320–332. [Google Scholar] [CrossRef]
- Firth, D.; Fahy, F.J. Acoustic characteristics of circular bends in pipes. J. Sound Vib. 1984, 97, 287–303. [Google Scholar] [CrossRef]
- Nederveen, C.J. Influence of a toroidal bend on wind instrument tuning. J. Acoust. Soc. Am. 1998, 104, 1616–1626. [Google Scholar] [CrossRef]
- Félix, S.; Pagneux, V. Sound propagation in rigid bends: A multimodal approach. J. Acoust. Soc. Am. 2001, 110, 1329–1337. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Félix, S.; Pagneux, V. Multimodal analysis of acoustic propagation in three-dimensional bends. Wave Motion 2002, 36, 157–168. [Google Scholar] [CrossRef]
- Félix, S.; Pagneux, V. Sound attenuation in lined bends. J. Acoust. Soc. Am. 2004, 116, 1921–1931. [Google Scholar] [CrossRef] [Green Version]
- Félix, S.; Pagneux, V. Ray-wave correspondence in bent waveguides. Wave Motion 2005, 41, 339–355. [Google Scholar] [CrossRef]
- Félix, S.; Dalmont, J.P.; Nederveen, C.J. Effects of bending portions of the air column on the acoustical resonances of a wind instrument. J. Acoust. Soc. Am. 2012, 131, 4164–4172. [Google Scholar] [CrossRef] [Green Version]
- Yang, C. Acoustic attenuation of a curved duct containing a curved axial microperforated panel. J. Acoust. Soc. Am. 2019, 145, 501–511. [Google Scholar] [CrossRef]
- Campos, L.M.B.C.; Serrão, P.G.T.A. On helicoidal rectangular coordinates for the acoustics of bent and twisted tubes. Wave Motion 2003, 38, 53–66. [Google Scholar] [CrossRef]
- Bernoulli, J. Véritable hypothèse de la résistance des solides, avec la démonstration de la courbure de corps qui font resort. In Mémoires de Mathématique et de Physique de l’Académie Royale des Sciences; Académie Royale des Sciences: Paris, France, 1705; pp. 176–186. [Google Scholar]
- Euler, L. Methodus Inveniendi Líneas Curvas Maximi Minimive Proprietate Gaudantes, Sive Solutio Problematis Isoperimetrici Latíssimo Sensu Accepti; Apud Marcum-Michaelem Bousquet & Socios: Laussane, Geneva, Switzerland, 1744. [Google Scholar]
- Love, A.E.H. A Treatise on the Mathematical Theory of Elasticity, 4th ed.; Dover Books on Engineering, Dover Publications, Inc.: New York, NY, USA, 1944. [Google Scholar]
- Timoshenko, S.P.; Monroe, J.G. Theory of Elastic Stability, 2nd ed.; McGraw-Hill Book Company, Inc.: New York, NY, USA, 1961. [Google Scholar]
- Prescott, J. Applied Elasticity, 1st ed.; Dover Publications: New York, NY, USA, 1946. [Google Scholar]
- Muskhelishvili, N.l. Some Basic Problems of the Mathematical Theory of Elasticity. Basic Equations, the Plane Theory of Elasticity, Torsion and Bending, 5th ed.; Nauka: Moscow, Russia, 1966. [Google Scholar]
- Landau, L.D.; Lifshitz, E.M. Theory of Elasticity, 2nd ed.; Course of Theoretical Physics; Pergamon Press Ltd.: Oxford, UK, 1970; Volume 7. [Google Scholar]
- Lekhnitskii, S.G. Theory of Elasticity of an Anisotropic Elastic Body; Mir Publishers: Moscow, Russia, 1981. [Google Scholar]
- Rekach, V.G. Manual of the Theory of Elasticity, 1st ed.; Mir Publishers: Moscow, Russia, 1979. [Google Scholar]
- Parton, V.Z.; Perline, P.I. Méthodes de la Théorie Mathématique de l’élasticité; Éditions Mir: Moscow, Russia, 1984; Volume 2. [Google Scholar]
- Antman, S.S. Nonlinear Problems of Elasticity, 1st ed.; Applied Mathematical Sciences; Springer Science+Business Media: New York, NY, USA, 1995; Volume 107. [Google Scholar] [CrossRef]
- Campos, L.M.B.C.; Marta, A.C. On the prevention or facilitation of buckling of beams. Int. J. Mech. Sci. 2014, 79, 95–104. [Google Scholar] [CrossRef]
- Chan, S.L. Geometric and material non-linear analysis of beam-columns and frames using the minimum residual displacement method. Int. J. Numer. Methods Eng. 1988, 26, 2657–2669. [Google Scholar] [CrossRef]
- Campos, L.M.B.C.; Silva, M.J.S. On the Generation of Harmonics by the Non-Linear Buckling of an Elastic Beam. Appl. Mech. 2021, 2, 383–418. [Google Scholar] [CrossRef]
- Kapania, R.K.; Raciti, S. Recent Advances in Analysis of Laminated Beams and Plates, Part I: Shear Effects and Buckling. AIAA J. 1989, 27, 923–935. [Google Scholar] [CrossRef]
- Huang, H.; Kardomateas, G.A. Buckling and Initial Postbuckling Behavior of Sandwich Beams Including Transverse Shear. AIAA J. 2002, 40, 2331–2335. [Google Scholar] [CrossRef] [Green Version]
- Silvestre, N. Generalised beam theory to analyse the buckling behaviour of circular cylindrical shells and tubes. Thin-Walled Struct. 2007, 45, 185–198. [Google Scholar] [CrossRef]
- Machado, S.P. Non-linear buckling and postbuckling behavior of thin-walled beams considering shear deformation. Int. J. -Non-Linear Mech. 2008, 43, 345–365. [Google Scholar] [CrossRef]
- Ruta, G.C.; Varano, V.; Pignataro, M.; Rizzi, N.L. A beam model for the flexural–torsional buckling of thin-walled members with some applications. Thin-Walled Struct. 2008, 46, 816–822. [Google Scholar] [CrossRef]
- Mancusi, G.; Feo, L. Non-linear pre-buckling behavior of shear deformable thin-walled composite beams with open cross-section. Compos. Part B Eng. 2013, 47, 379–390. [Google Scholar] [CrossRef]
- Lanc, D.; Turkalj, G.; Vo, T.P.; Brnić, J. Nonlinear buckling behaviours of thin-walled functionally graded open section beams. Compos. Struct. 2016, 152, 829–839. [Google Scholar] [CrossRef] [Green Version]
- Hutchinson, J.W.; Budiansky, B. Dynamic Buckling Estimates. AIAA J. 1966, 4, 525–530. [Google Scholar] [CrossRef]
- Zhao, J.; Jia, J.; He, X.; Wang, H. Post-buckling and Snap-Through Behavior of Inclined Slender Beams. J. Appl. Mech. 2008, 75. [Google Scholar] [CrossRef] [Green Version]
- Vega-Posada, C.; Areiza-Hurtado, M.; Aristizabal-Ochoa, J.D. Large-deflection and post-buckling behavior of slender beam-columns with non-linear end-restraints. Int. J. -Non-Linear Mech. 2011, 46, 79–95. [Google Scholar] [CrossRef]
- Goriely, A.; Vandiver, R.; Destrade, M. Nonlinear Euler buckling. Proc. R. Soc. A Math. Phys. Eng. Sci. 2008, 464, 3003–3019. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Hu, Y. Buckling analysis of size-dependent nonlinear beams based on a nonlocal strain gradient theory. Int. J. Eng. Sci. 2015, 97, 84–94. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Kreider, W.; Anderson, T.J. Investigation of natural frequencies and mode shapes of buckled beams. AIAA J. 1995, 33, 1121–1126. [Google Scholar] [CrossRef]
- Lestari, W.; Hanagud, S. Nonlinear vibration of buckled beams: Some exact solutions. Int. J. Solids Struct. 2001, 38, 4741–4757. [Google Scholar] [CrossRef]
- Abou-Rayan, A.M.; Nayfeh, A.H.; Mook, D.T.; Nayfeh, M.A. Nonlinear Response of a Parametrically Excited Buckled Beam. Nonlinear Dyn. 1993, 4, 499–525. [Google Scholar] [CrossRef]
- Kreider, W.; Nayfeh, A.H. Experimental Investigation of Single-Mode Responses in a Fixed-Fixed Buckled Beam. Nonlinear Dyn. 1998, 15, 155–177. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Lacarbonara, W.; Chin, C.M. Nonlinear Normal Modes of Buckled Beams: Three-to-One and One-to-One Internal Resonances. Nonlinear Dyn. 1999, 18, 253–273. [Google Scholar] [CrossRef]
- Jensen, J.S. Buckling of an elastic beam with added high-frequency excitation. Int. J. -Non-Linear Mech. 2000, 35, 217–227. [Google Scholar] [CrossRef]
- Emam, S.A.; Nayfeh, A.H. Nonlinear Responses of Buckled Beams to Subharmonic-Resonance Excitations. Nonlinear Dyn. 2004, 35, 105–122. [Google Scholar] [CrossRef]
- Emam, S.A.; Nayfeh, A.H. On the Nonlinear Dynamics of a Buckled Beam Subjected to a Primary-Resonance Excitation. Nonlinear Dyn. 2004, 35, 1–17. [Google Scholar] [CrossRef]
- Emam, S.A.; Nayfeh, A.H. Non-linear response of buckled beams to 1:1 and 3:1 internal resonances. Int. J. -Non-Linear Mech. 2013, 52, 12–25. [Google Scholar] [CrossRef]
- Pinto, O.C.; Gonçalves, P.B. Non-linear control of buckled beams under step loading. Mech. Syst. Signal Process. 2000, 14, 967–985. [Google Scholar] [CrossRef]
- Li, S.; Zhou, Y. Post-buckling of a hinged-fixed beam under uniformly distributed follower forces. Mech. Res. Commun. 2005, 32, 359–367. [Google Scholar] [CrossRef]
- Li, S.r.; Zhang, J.h.; Zhao, Y.g. Thermal post-buckling of Functionally Graded Material Timoshenko beams. Appl. Math. Mech. 2006, 27, 803–810. [Google Scholar] [CrossRef]
- Li, S.R.; Batra, R.C. Thermal Buckling and Postbuckling of Euler-Bernoulli Beams Supported on Nonlinear Elastic Foundations. AIAA J. 2007, 45, 712–720. [Google Scholar] [CrossRef] [Green Version]
- Song, X.; Li, S.R. Thermal buckling and post-buckling of pinned–fixed Euler–Bernoulli beams on an elastic foundation. Mech. Res. Commun. 2007, 34, 164–171. [Google Scholar] [CrossRef]
- Kirchhoff, G. Ueber die Transversalschwingungen eines Stabes von veränderlichem Querschnitt. Ann. Phys. 1880, 246, 501–512. [Google Scholar] [CrossRef] [Green Version]
- Wrinch, D. On the lateral vibrations of bars of conical type. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1922, 101, 493–508. [Google Scholar] [CrossRef] [Green Version]
- Ono, A. Lateral vibrations of tapered bars. J. Soc. Mech. Eng. 1925, 28, 429–441. [Google Scholar] [CrossRef]
- Conway, H.D. The large deflection of simply supported beams. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1947, 38, 905–911. [Google Scholar] [CrossRef]
- Gaines, J.H.; Volterra, E. Transverse Vibrations of Cantilever Bars of Variable Cross Section. J. Acoust. Soc. Am. 1966, 39, 674–679. [Google Scholar] [CrossRef]
- Wang, H.c.; Worley, W.J. Tables of Natural Frequencies and Nodes for Transverse Vibration of Tapered Beams; Technical Report; University of Illinois: Washington, DC, USA, 1966. [Google Scholar]
- Wang, H.C. Generalized Hypergeometric Function Solutions on the Transverse Vibration of a Class of Nonuniform Beams. J. Appl. Mech. 1967, 34, 702–708. [Google Scholar] [CrossRef]
- Lau, J.H. Vibration Frequencies of Tapered Bars With End Mass. J. Appl. Mech. 1984, 51, 179–181. [Google Scholar] [CrossRef]
- Naguleswaran, S. Vibration of an Euler-Bernoulli beam of constant depth and with linearly varying breadth. J. Sound Vib. 1992, 153, 509–522. [Google Scholar] [CrossRef]
- Downs, B. Transverse Vibrations of Cantilever Beams Having Unequal Breadth and Depth Tapers. J. Appl. Mech. 1977, 44, 737–742. [Google Scholar] [CrossRef]
- Sato, K. Transverse vibrations of linearly tapered beams with ends restrained elastically against rotation subjected to axial force. Int. J. Mech. Sci. 1980, 22, 109–115. [Google Scholar] [CrossRef]
- Chen, R.S. Evaluation of natural vibration frequency and buckling loading of bending bar by searching zeros of a target function. Commun. Numer. Methods Eng. 1997, 13, 695–704. [Google Scholar] [CrossRef]
- Amabili, M.; Garziera, R. A technique for the systematic choice of admissible functions in the Rayleigh-Ritz method. J. Sound Vib. 1999, 224, 519–539. [Google Scholar] [CrossRef]
- Zhou, D.; Cheung, Y.K. The free vibration of a type of tapered beams. Comput. Methods Appl. Mech. Eng. 2000, 188, 203–216. [Google Scholar] [CrossRef]
- Bayat, M.; Pakar, I.; Bayat, M. Analytical study on the vibration frequencies of tapered beams. Lat. Am. J. Solids Struct. 2011, 8, 149–162. [Google Scholar] [CrossRef]
- Cazzani, A.; Rosati, L.; Ruge, P. The contribution of Gustav R. Kirchhoff to the dynamics of tapered beams. Z. Angew. Math. Mech. 2017, 97, 1174–1203. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.Y. Vibration of a tapered cantilever of constant thickness and linearly tapered width. Arch. Appl. Mech. 2013, 83, 171–176. [Google Scholar] [CrossRef]
- Storti, D.; Aboelnaga, Y. Bending Vibrations of a Class of Rotating Beams with Hypergeometric Solutions. J. Appl. Mech. 1987, 54, 311–314. [Google Scholar] [CrossRef]
- Auciello, N.M.; Maurizi, M.J. On the natural vibrations of tapered beams with attached inertia elements. J. Sound Vib. 1997, 199, 522–530. [Google Scholar] [CrossRef]
- Yoo, H.H.; Shin, S.H. Vibration analysis of rotating cantilever beams. J. Sound Vib. 1998, 212, 807–828. [Google Scholar] [CrossRef]
- Balakrishnan, A.V.; Iliff, K.W. Continuum Aeroelastic Model for Inviscid Subsonic Bending-Torsion Wing Flutter. J. Aerosp. Eng. 2007, 20, 152–164. [Google Scholar] [CrossRef]
- Chang, C.S.; Hodges, D.H. Parametric Studies on Ground Vibration Test Modeling for Highly Flexible Aircraft. J. Aircr. 2007, 44, 2049–2059. [Google Scholar] [CrossRef]
- Su, W.; Cesnik, C.E.S. Dynamic Response of Highly Flexible Flying Wings. AIAA J. 2011, 49, 324–339. [Google Scholar] [CrossRef]
- Saltari, F.; Riso, C.; Matteis, G.D.; Mastroddi, F. Finite-Element-Based Modeling for Flight Dynamics and Aeroelasticity of Flexible Aircraft. J. Aircr. 2017, 54, 2350–2366. [Google Scholar] [CrossRef]
- Changchuan, X.; Lan, Y.; Yi, L.; Chao, Y. Stability of Very Flexible Aircraft with Coupled Nonlinear Aeroelasticity and Flight Dynamics. J. Aircr. 2018, 55, 862–874. [Google Scholar] [CrossRef]
- Rui, X.; Abbas, L.K.; Yang, F.; Wang, G.; Yu, H.; Wang, Y. Flapwise Vibration Computations of Coupled Helicopter Rotor/Fuselage: Application of Multibody System Dynamics. AIAA J. 2018, 56, 818–835. [Google Scholar] [CrossRef]
- Campos, L.M.B.C.; Marta, A.C. On The Vibrations of Pyramidal Beams With Rectangular Cross-Section and Application to Unswept Wings. Q. J. Mech. Appl. Math. 2021, 74, 1–31. [Google Scholar] [CrossRef]
- Zippo, A.; Ferrari, G.; Amabili, M.; Barbieri, M.; Pellicano, F. Active vibration control of a composite sandwich plate. Compos. Struct. 2015, 128, 100–114. [Google Scholar] [CrossRef]
- Christie, M.D.; Sun, S.; Deng, L.; Ning, D.H.; Du, H.; Zhang, S.W.; Li, W.H. A variable resonance magnetorheological-fluid-based pendulum tuned mass damper for seismic vibration suppression. Mech. Syst. Signal Process. 2019, 116, 530–544. [Google Scholar] [CrossRef]
- Pernod, L.; Lossouarn, B.; Astolfi, J.A.; Deü, J.F. Vibration damping of marine lifting surfaces with resonant piezoelectric shunts. J. Sound Vib. 2021, 496. [Google Scholar] [CrossRef]
- Saffari, P.R.; Fakhraie, M.; Roudbari, M.A. Size-Dependent Vibration Problem of Two Vertically-Aligned Single-Walled Boron Nitride Nanotubes Conveying Fluid in Thermal Environment Via Nonlocal Strain Gradient Shell Model. J. Solid Mech. 2021, 13, 164–185. [Google Scholar] [CrossRef]
- Thongchom, C.; Saffari, P.R.; Saffari, P.R.; Refahati, N.; Sirimontree, S.; Keawsawasvong, S.; Titotto, S. Dynamic response of fluid-conveying hybrid smart carbon nanotubes considering slip boundary conditions under a moving nanoparticle. Mech. Adv. Mater. Struct. 2022. [Google Scholar] [CrossRef]
- Campos, L.M.B.C. Note on a generalization of Gauss least squares method applied to active noise reduction systems. J. Sound Vib. 1999, 219, 925–926. [Google Scholar] [CrossRef]
- Campos, L.M.B.C. Linear Differential Equations and Oscillators, 1st ed.; Mathematics and Physics for Science and Technology; CRC Press: Boca Raton, FL, USA, 2019; Volume 4. [Google Scholar] [CrossRef]
- Campos, L.M.B.C. On waves in gases. Part II: Interaction of sound with magnetic and internal modes. Rev. Mod. Phys. 1987, 59, 363–463. [Google Scholar] [CrossRef]
- Campos, L.M.B.C. Higher-Order Differential Equations and Elasticity, 1st ed.; Mathematics and Physics for Science and Technology; CRC Press: Boca Raton, FL, USA, 2019; Volume 4. [Google Scholar] [CrossRef]
- Campos, L.M.B.C. Generalized Calculus with Applications to Matter and Forces, 1st ed.; Mathematics and Physics for Science and Technology; CRC Press: Boca Raton, FL, USA, 2014; Volume 3. [Google Scholar] [CrossRef]
- Lighthill, M.J. Introduction to Fourier Analysis and Generalised Functions; Cambridge Monographs on Mechanics and Applied Mathematics; Cambridge University Press: Cambridge, UK, 1958. [Google Scholar]
- Campos, L.M.B.C. Complex Analysis with Applications to Flows and Fields, 1st ed.; Mathematics and Physics for Science and Technology; CRC Press: Boca Raton, FL, USA, 2011; Volume 1. [Google Scholar] [CrossRef]
- Forsyth, A.R. A Treatise on Differential Equations, 6th ed.; Macmillan & Co. Ltd.: London, UK, 1956. [Google Scholar]
- Campos, L.M.B.C. Transcendental Representations with Applications to Solids and Fluids, 1st ed.; Mathematics and Physics for Science and Technology; CRC Press: Boca Raton, FL, USA, 2012; Volume 2. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order of Vibration n | First Period | Second Period | Third Period | Fourth Period |
|---|---|---|---|---|
| 2.467 | 2.467 | 2.467 | 2.467 | |
| 9.870 | 9.870 | 9.870 | 9.870 | |
| 22.207 | 22.207 | 22.207 | 22.207 | |
| 39.478 | 39.478 | 39.478 | 39.478 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Campos, L.M.B.C.; Silva, M.J.S. On the Countering of Free Vibrations by Forcing: Part I—Non-Resonant and Resonant Forcing with Phase Shifts. Appl. Mech. 2022, 3, 1352-1384. https://doi.org/10.3390/applmech3040078
Campos LMBC, Silva MJS. On the Countering of Free Vibrations by Forcing: Part I—Non-Resonant and Resonant Forcing with Phase Shifts. Applied Mechanics. 2022; 3(4):1352-1384. https://doi.org/10.3390/applmech3040078
Chicago/Turabian StyleCampos, Luiz M. B. C., and Manuel J. S. Silva. 2022. "On the Countering of Free Vibrations by Forcing: Part I—Non-Resonant and Resonant Forcing with Phase Shifts" Applied Mechanics 3, no. 4: 1352-1384. https://doi.org/10.3390/applmech3040078