
EMC of Inductive Automotive Charging Systems According to Standard SAE J2954

Abstract
:1. Introduction
2. Fundamentals of Wireless Electric Vehicle Charging
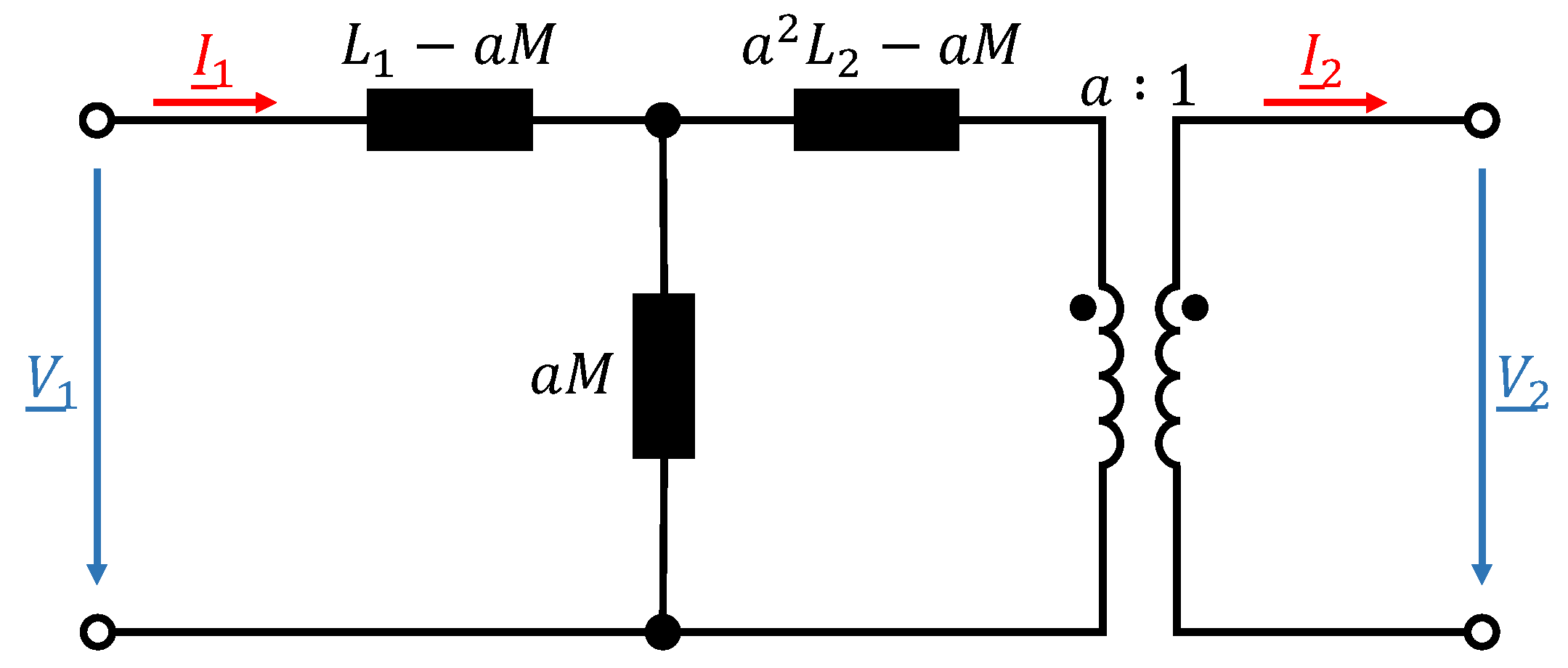
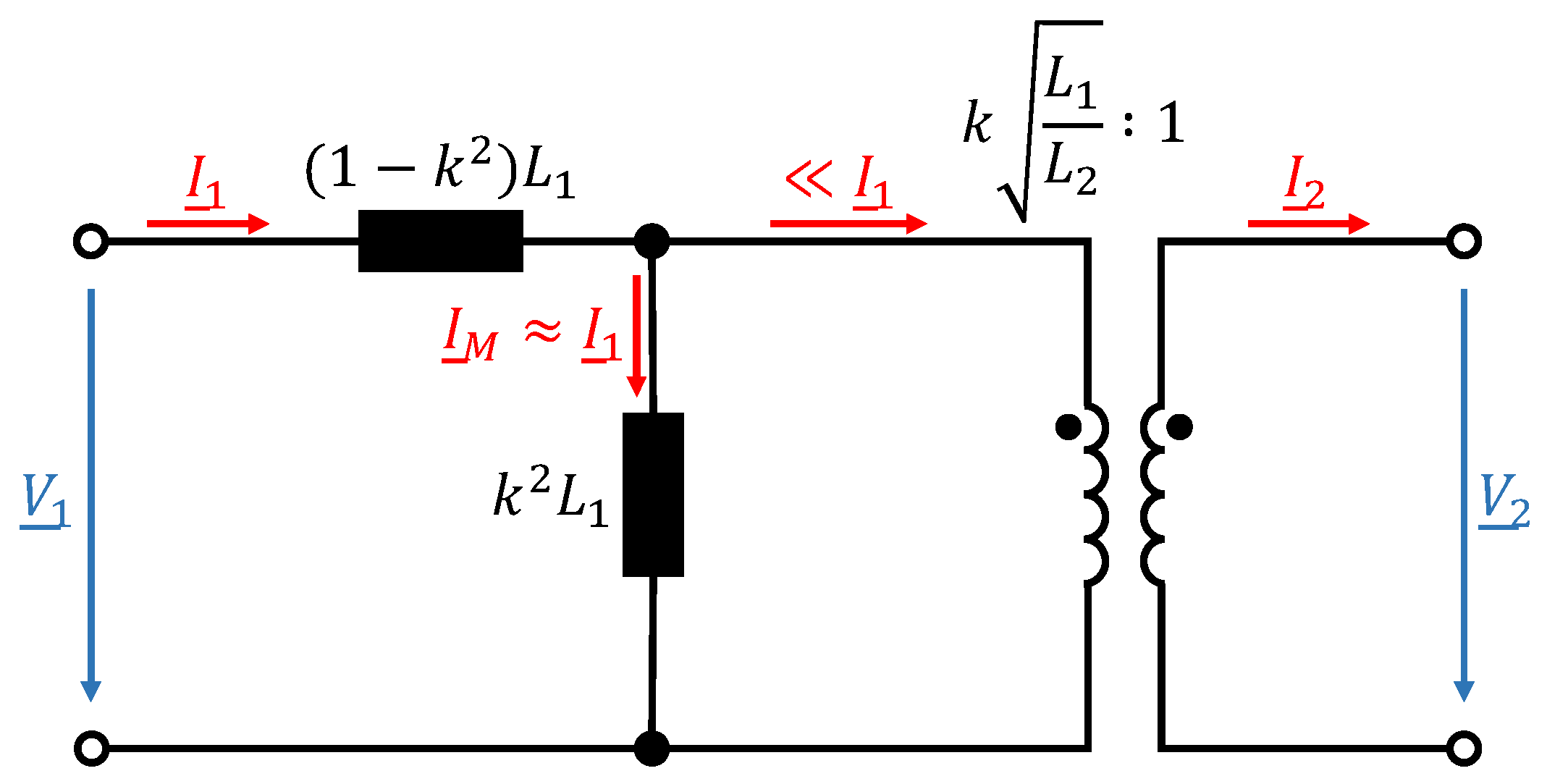
2.1. Lossless Air-Core Transformer
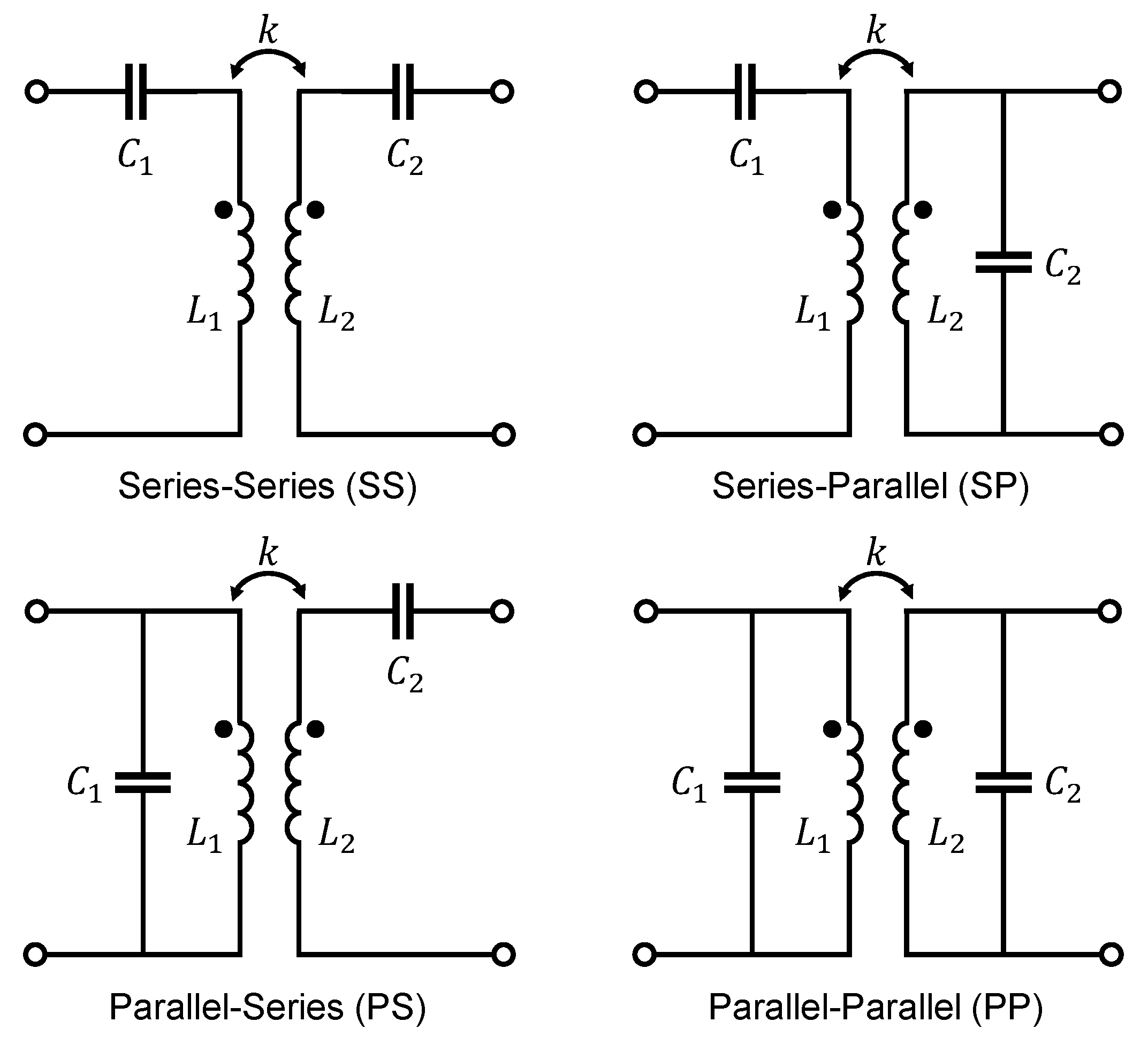
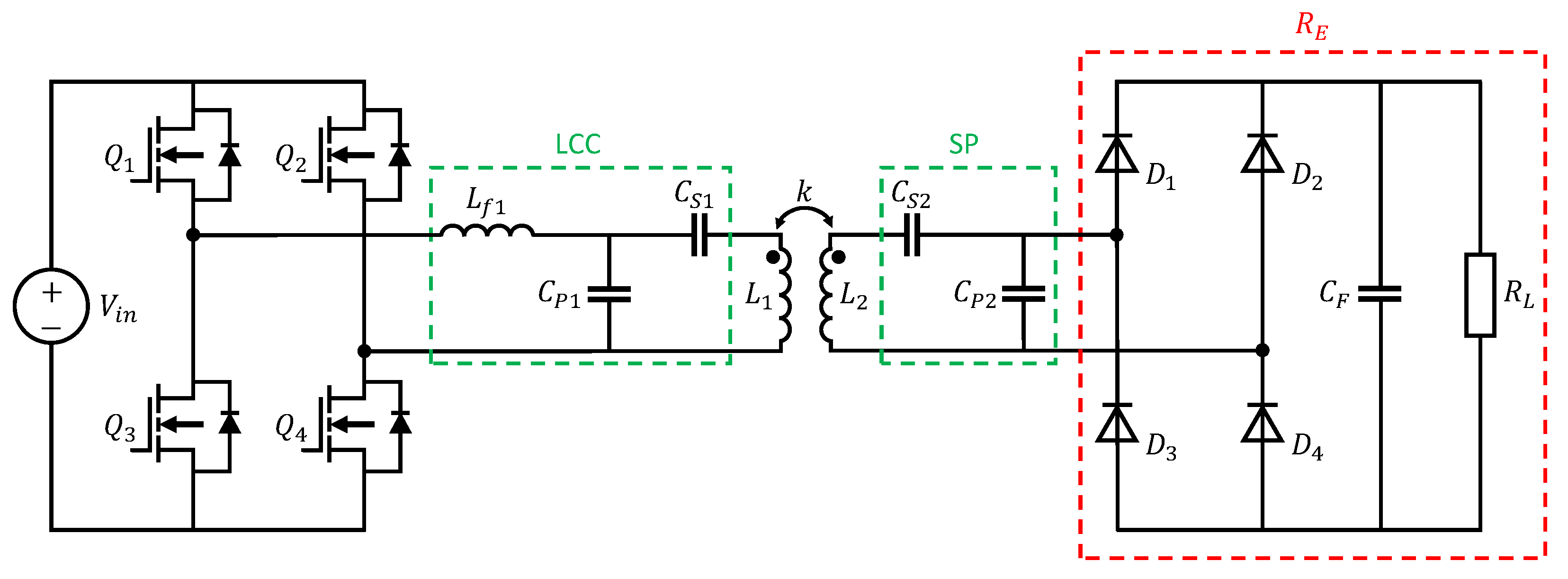
2.2. Resonant Inductive Wireless Power Transfer
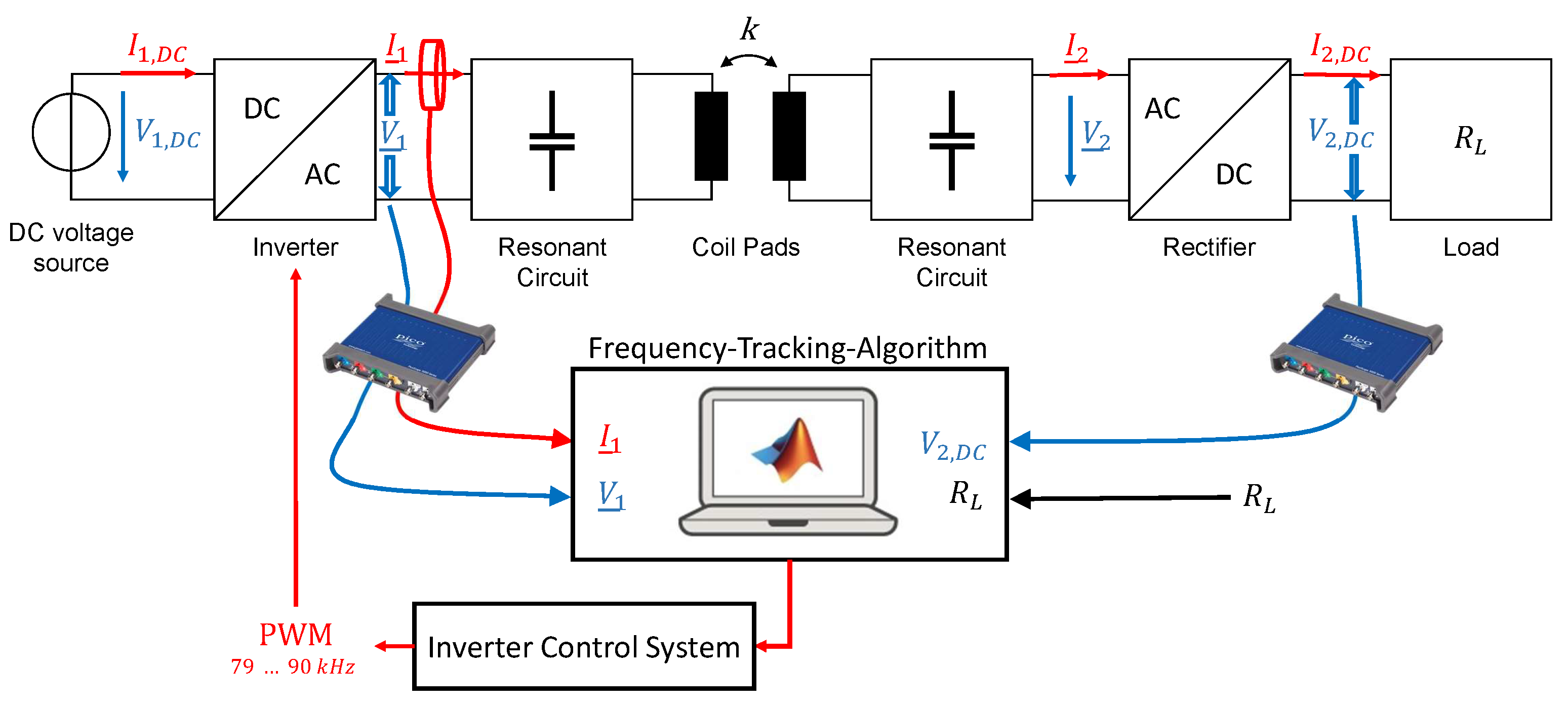
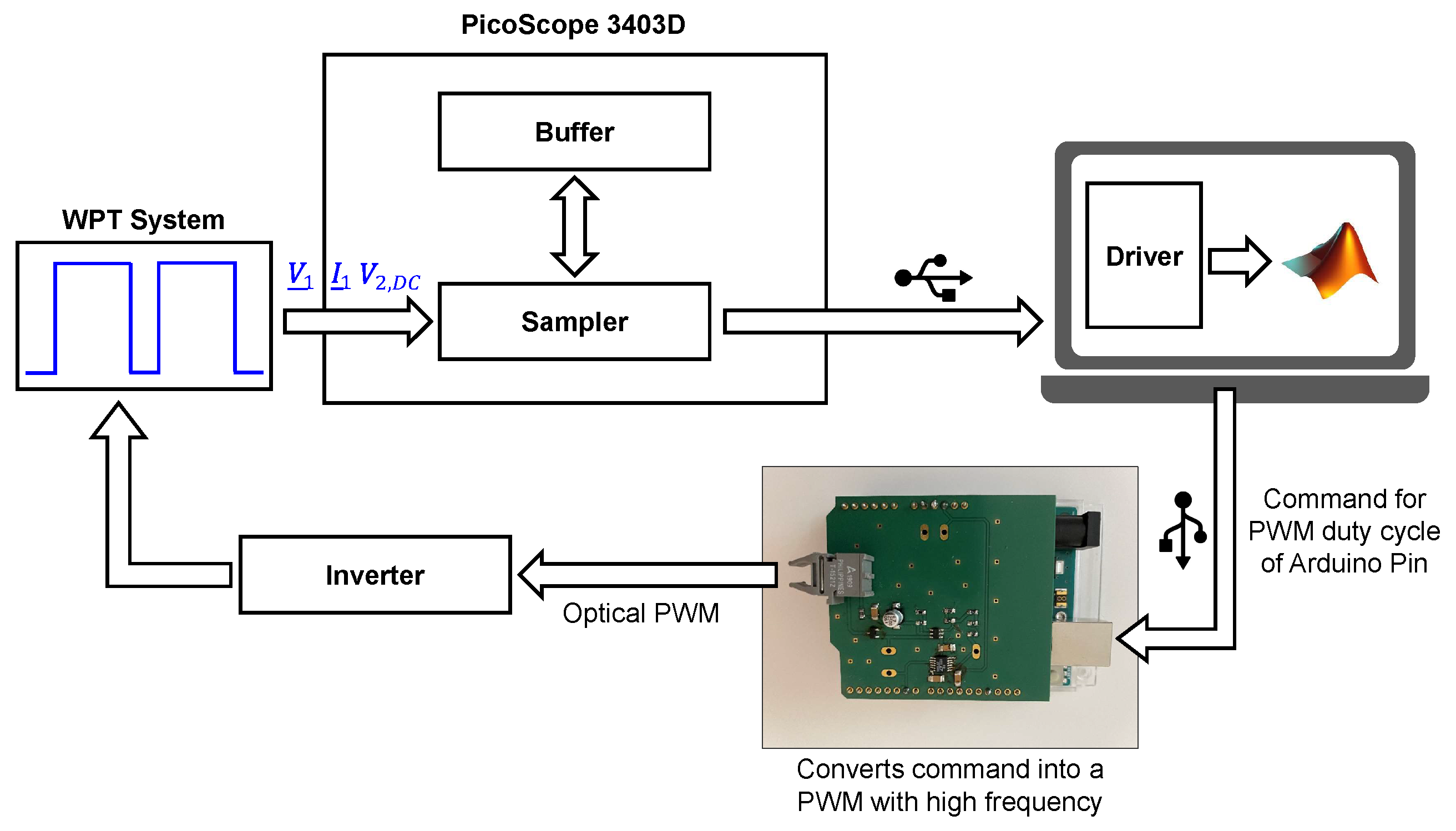
3. Frequency Tracking Algorithm
- Inverter output current ;
- Inverter output voltage ;
- Output voltage at the load (constant load).
4. Investigation of the Conducted and Field-Bound Interference Emissions
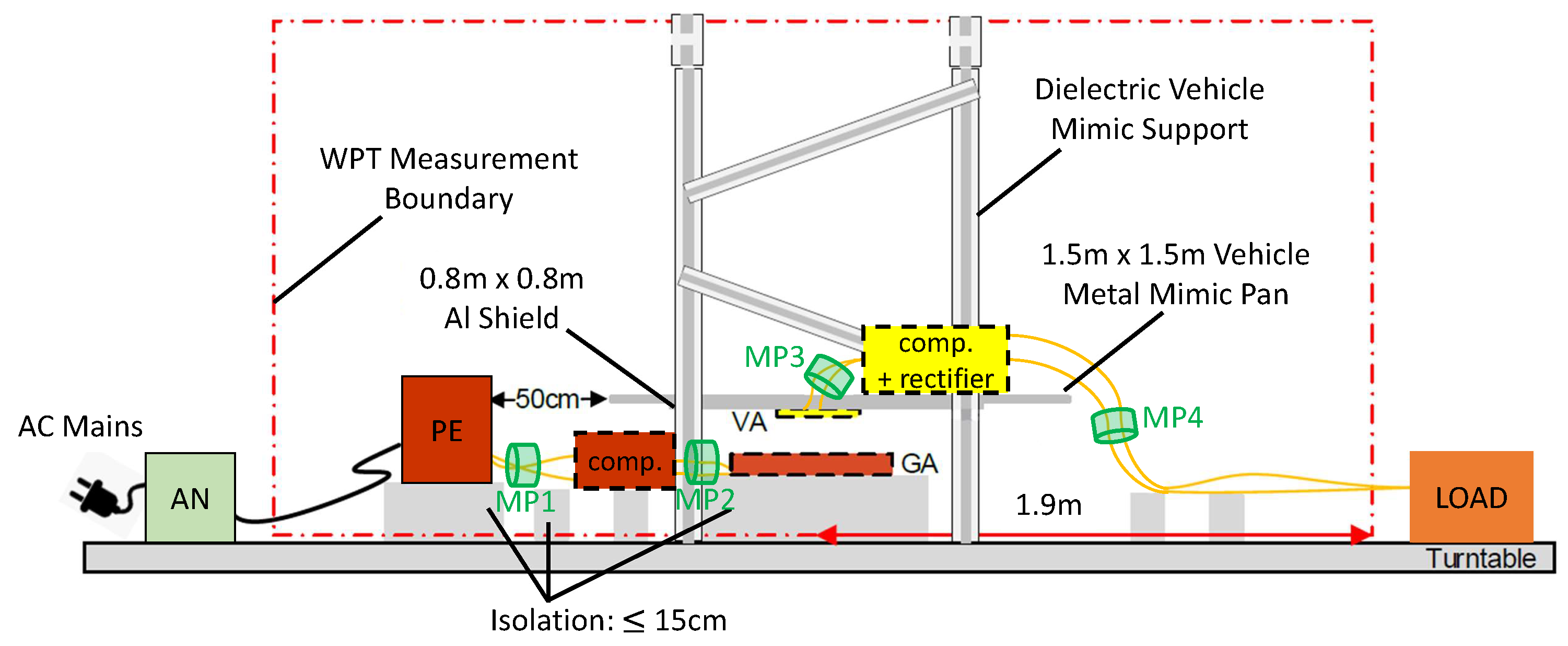
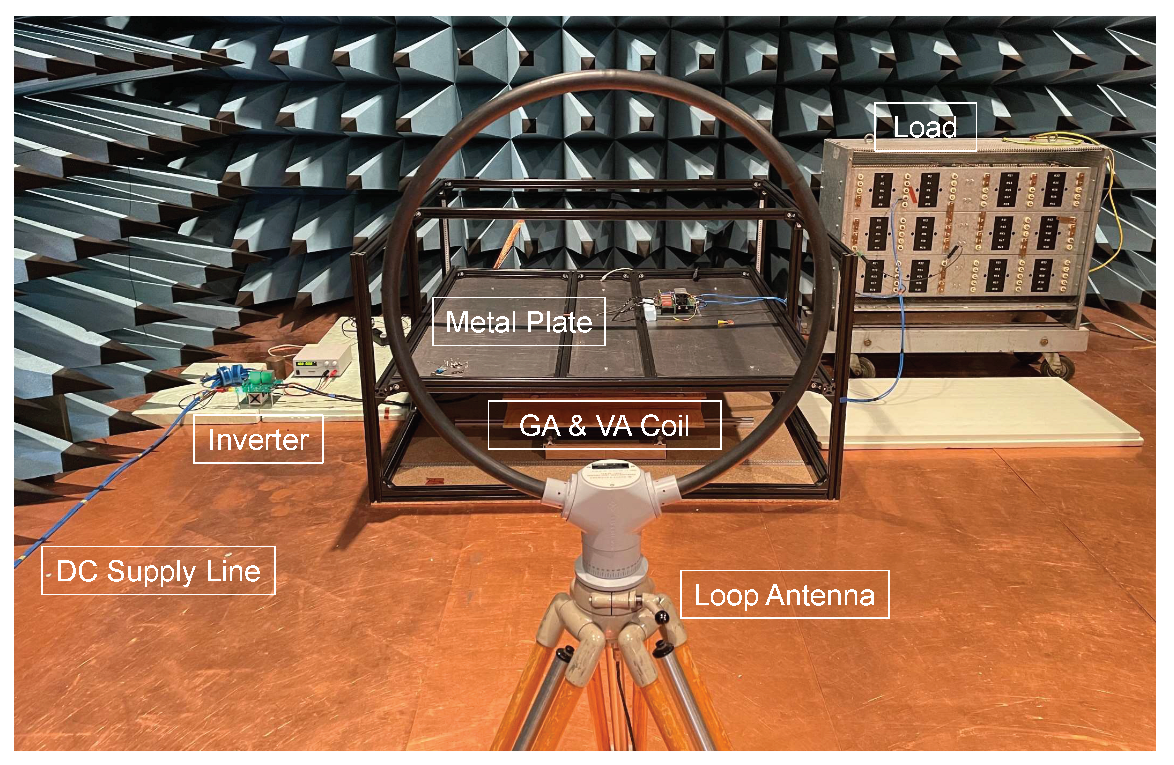
4.1. Test Bench Measurement Setup According to SAE J2954
- Society of Automotive Engineers (SAE);
- International Electrotechnical Commission (IEC);
- International Organization for Standardization (ISO);
- Comité international spécial des perturbations radioélectriques (CISPR).
4.2. EMC Investigation of WPT Systems
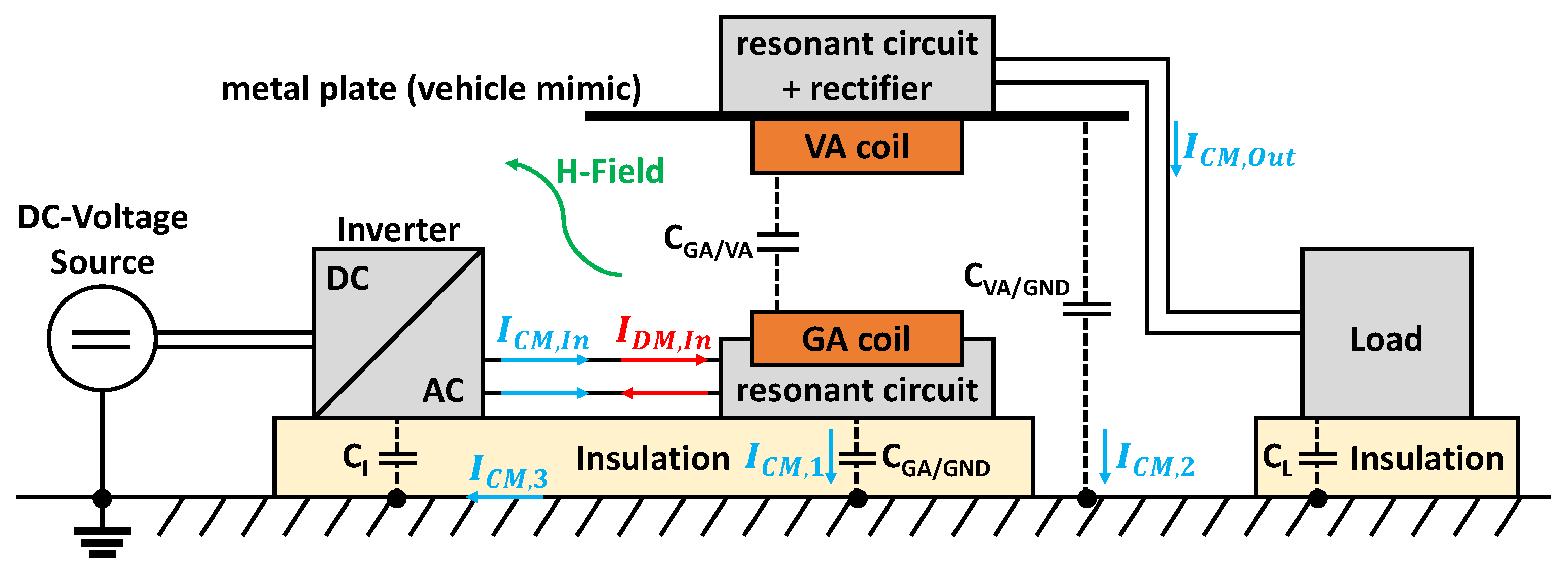
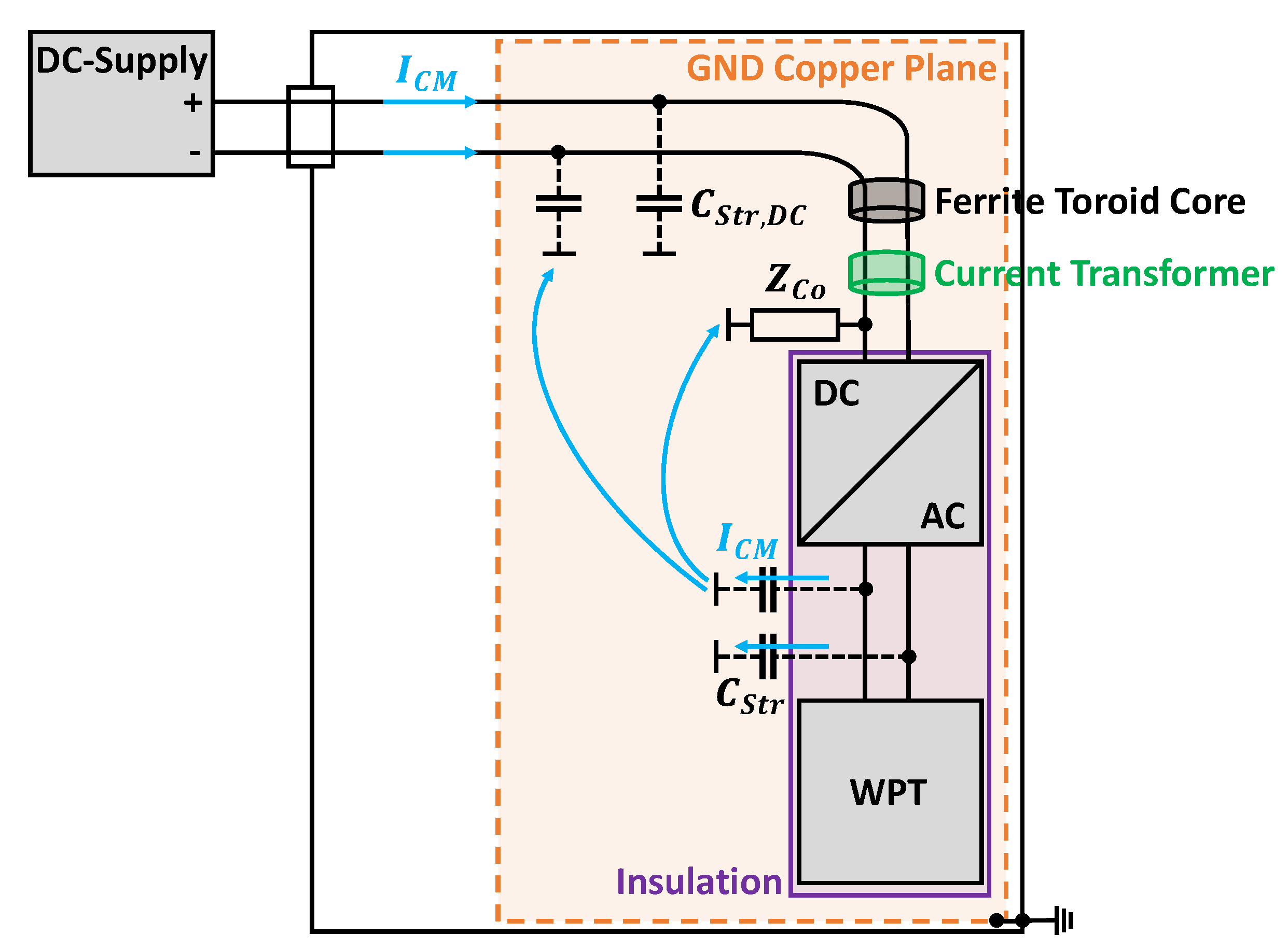
4.2.1. Essential Current Paths in WPT Systems
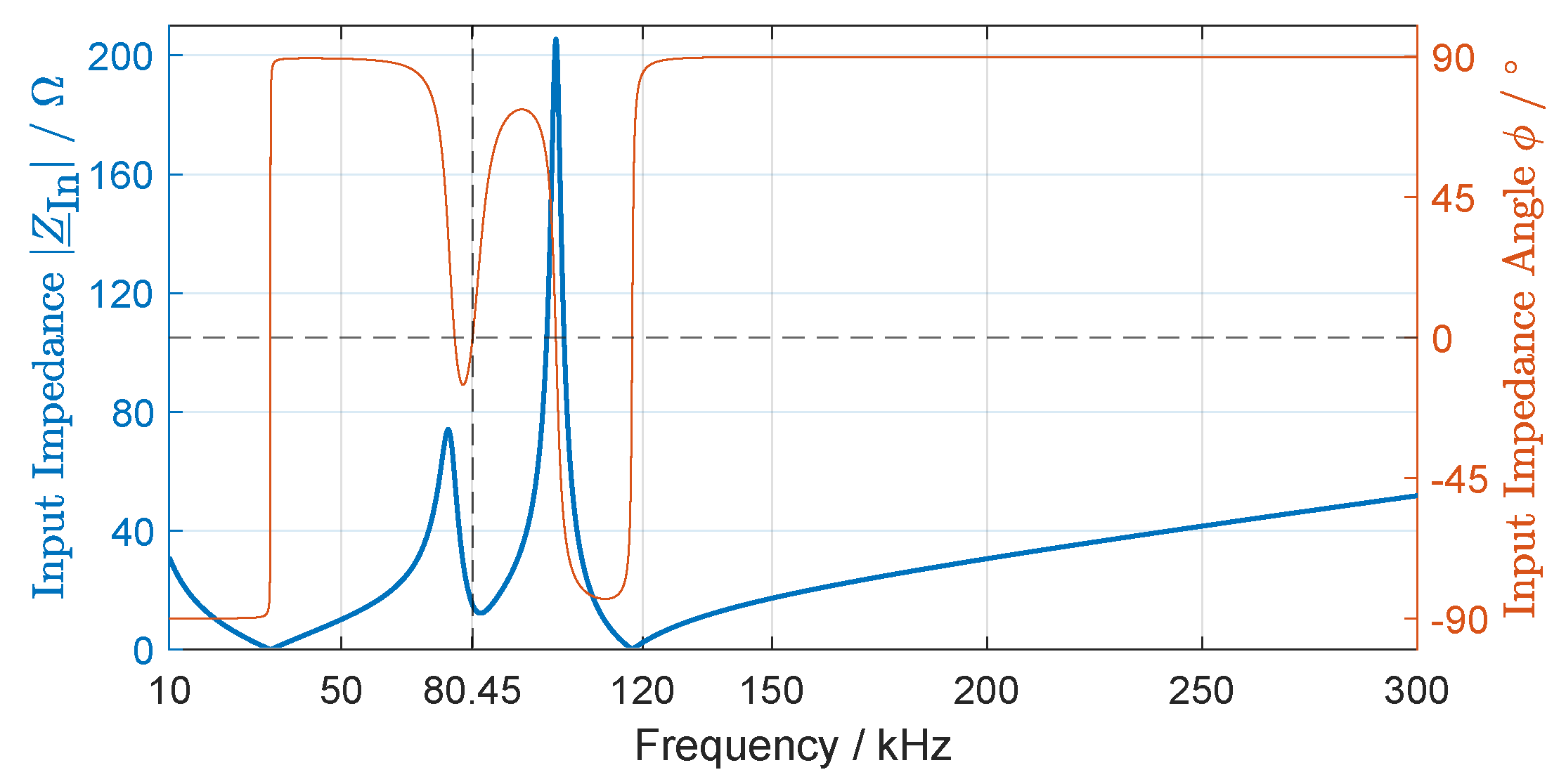
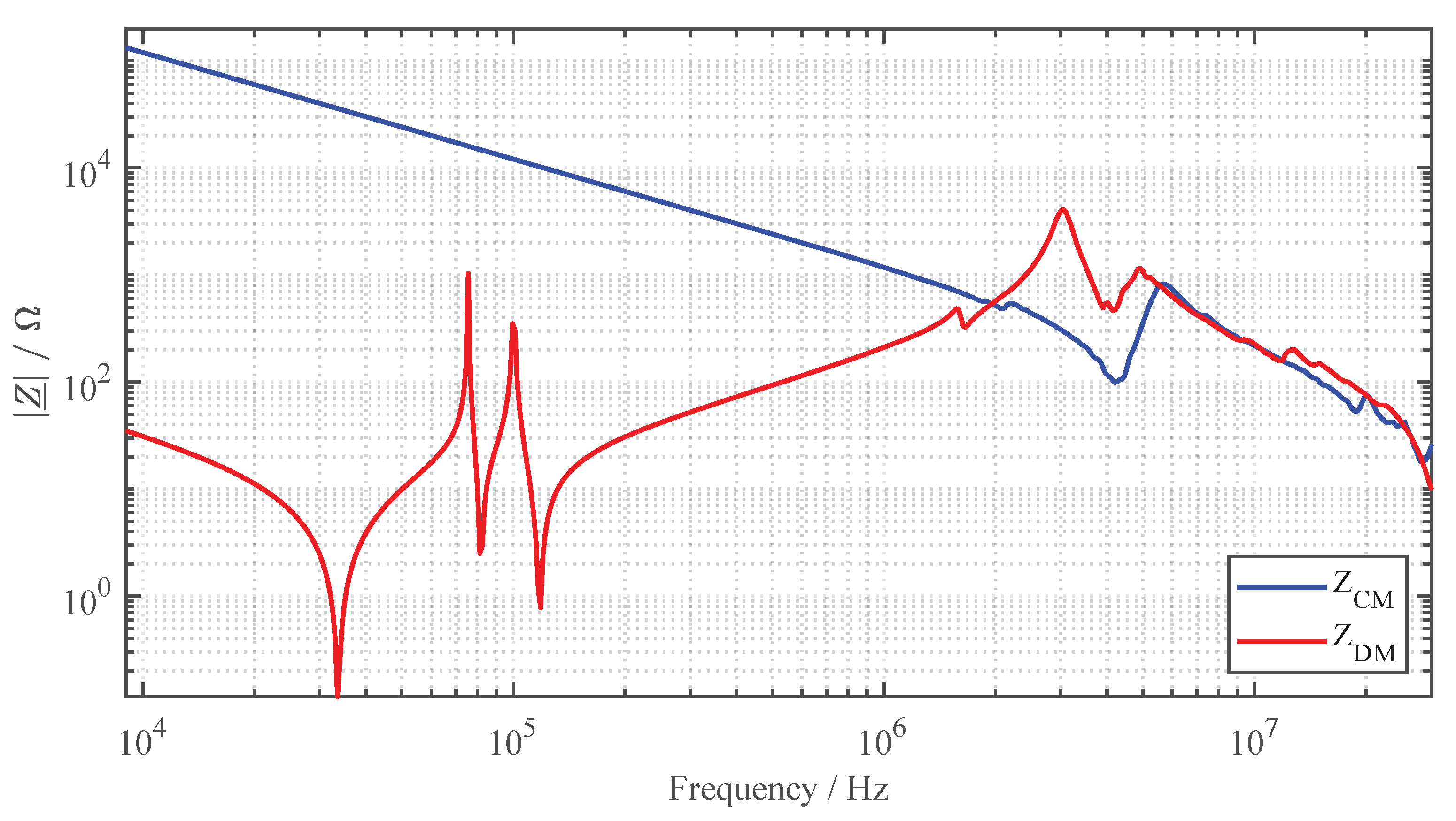
4.2.2. Impedance Behavior
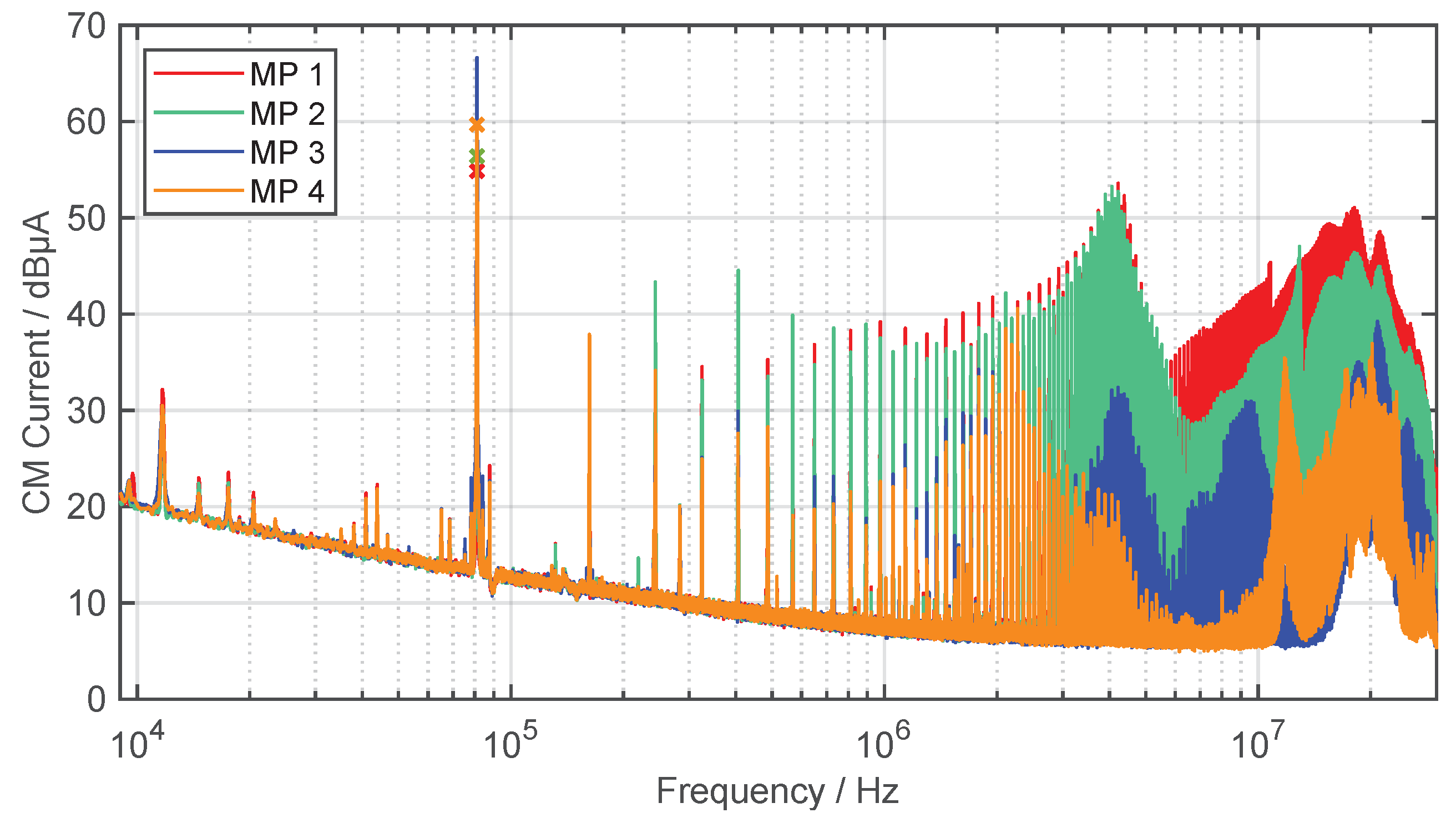
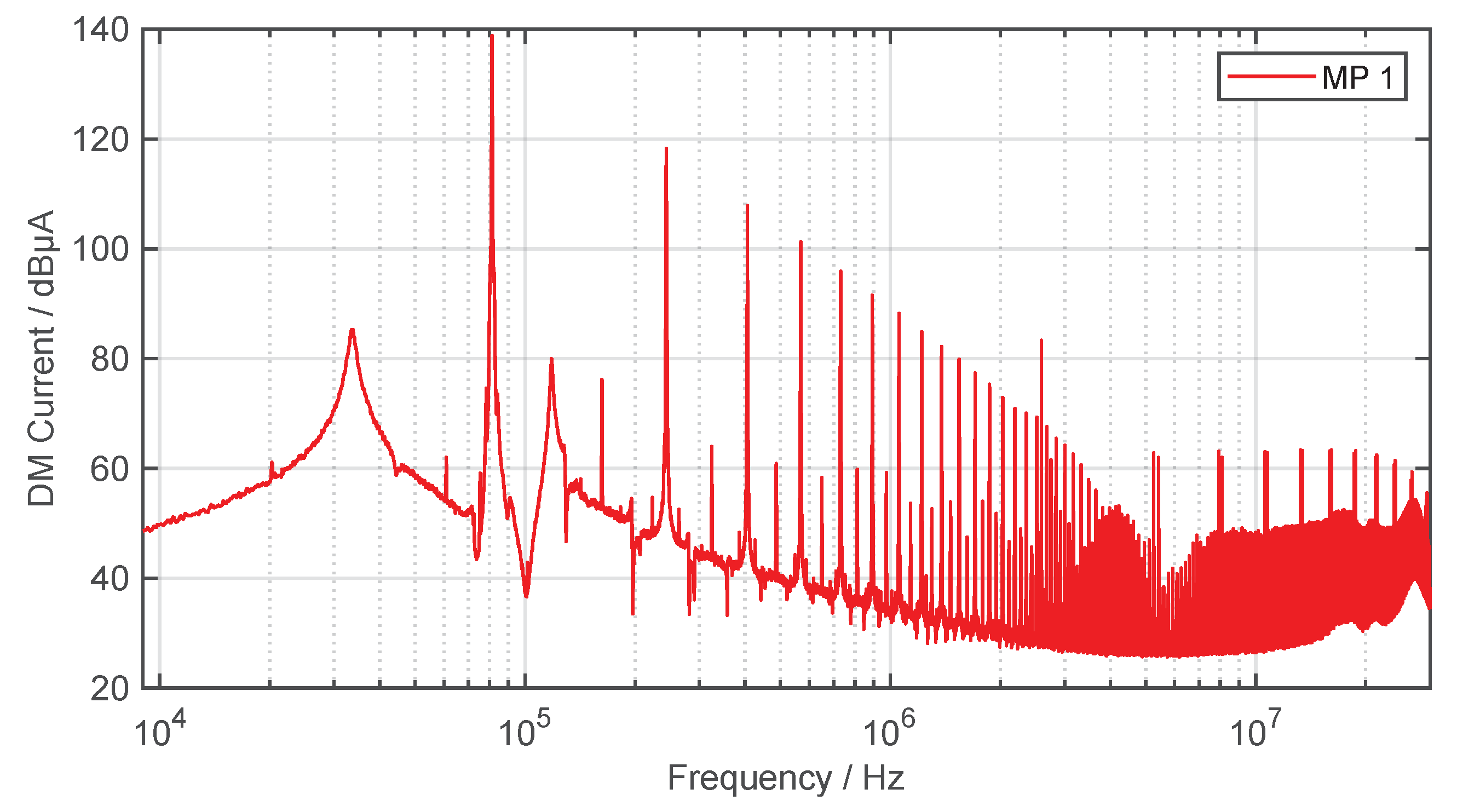
4.2.3. Conducted Interference Emissions
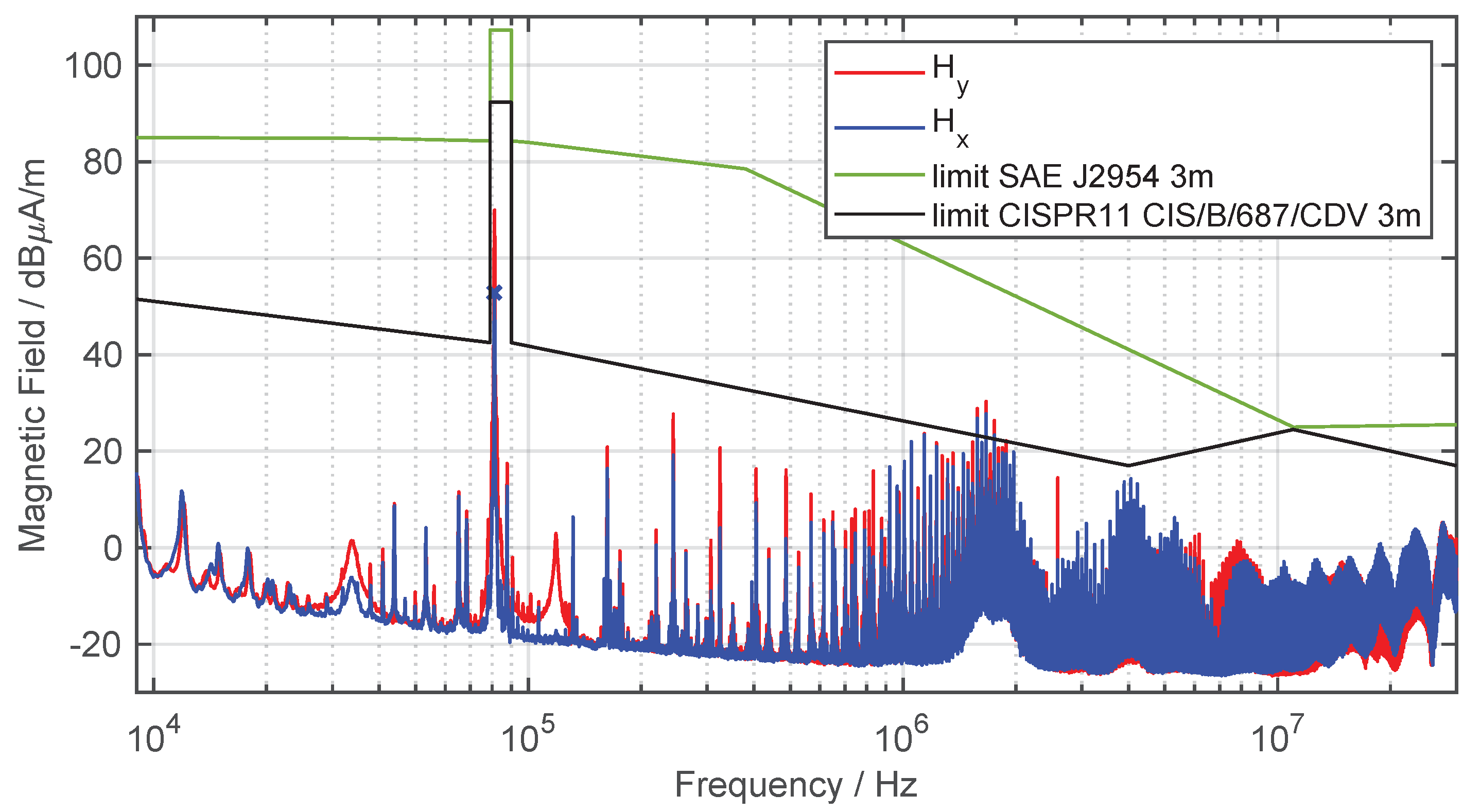
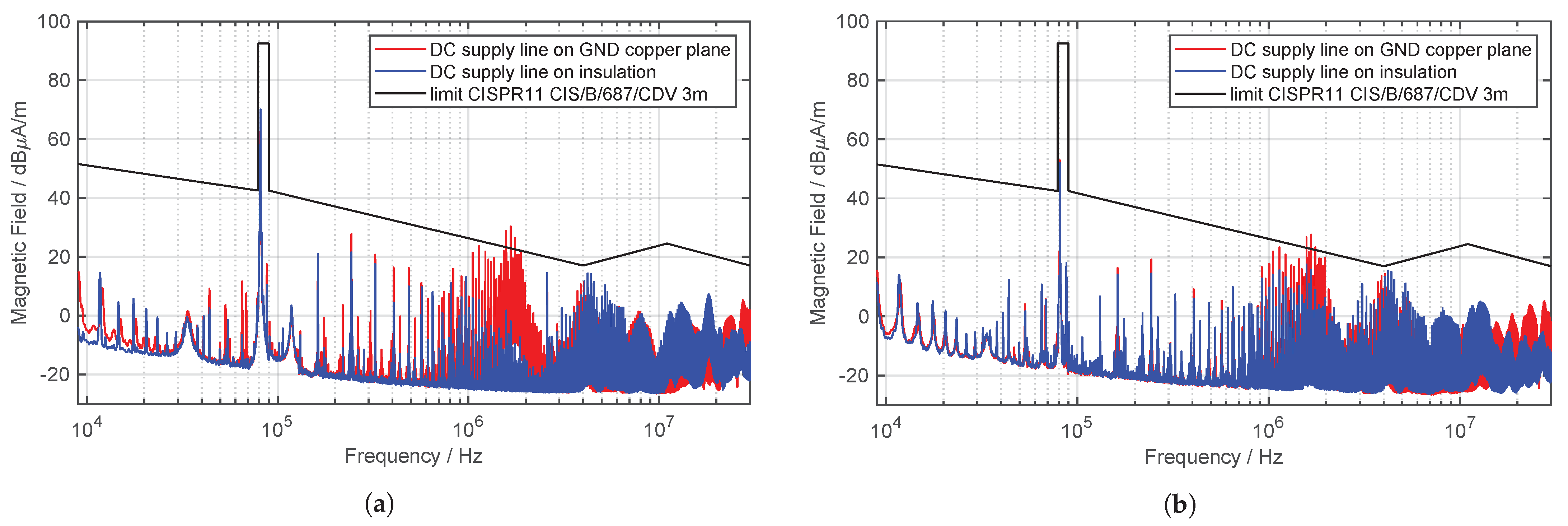
4.2.4. Field-Bound Interference Emissions
5. EMC Optimization of the Inductive Automotive Charging System
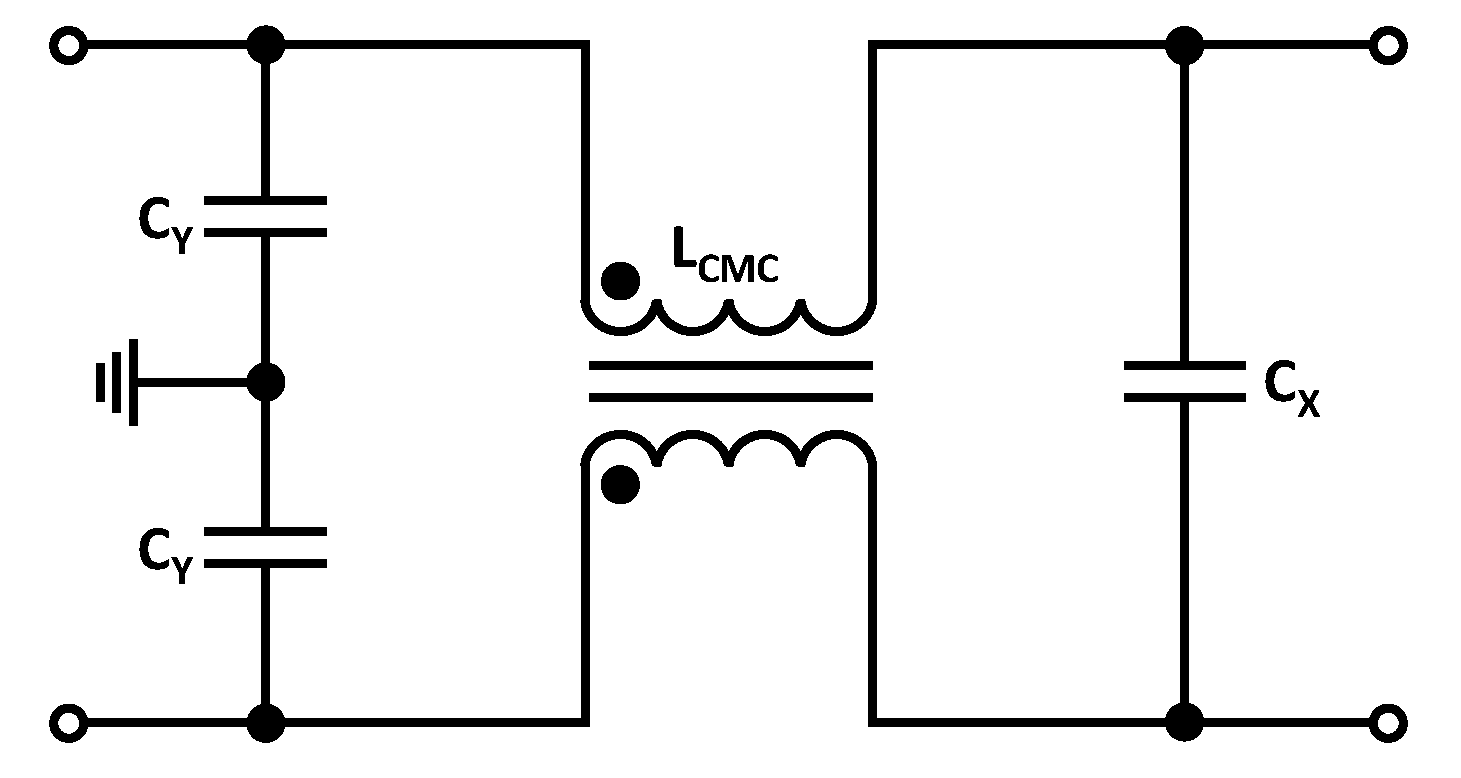
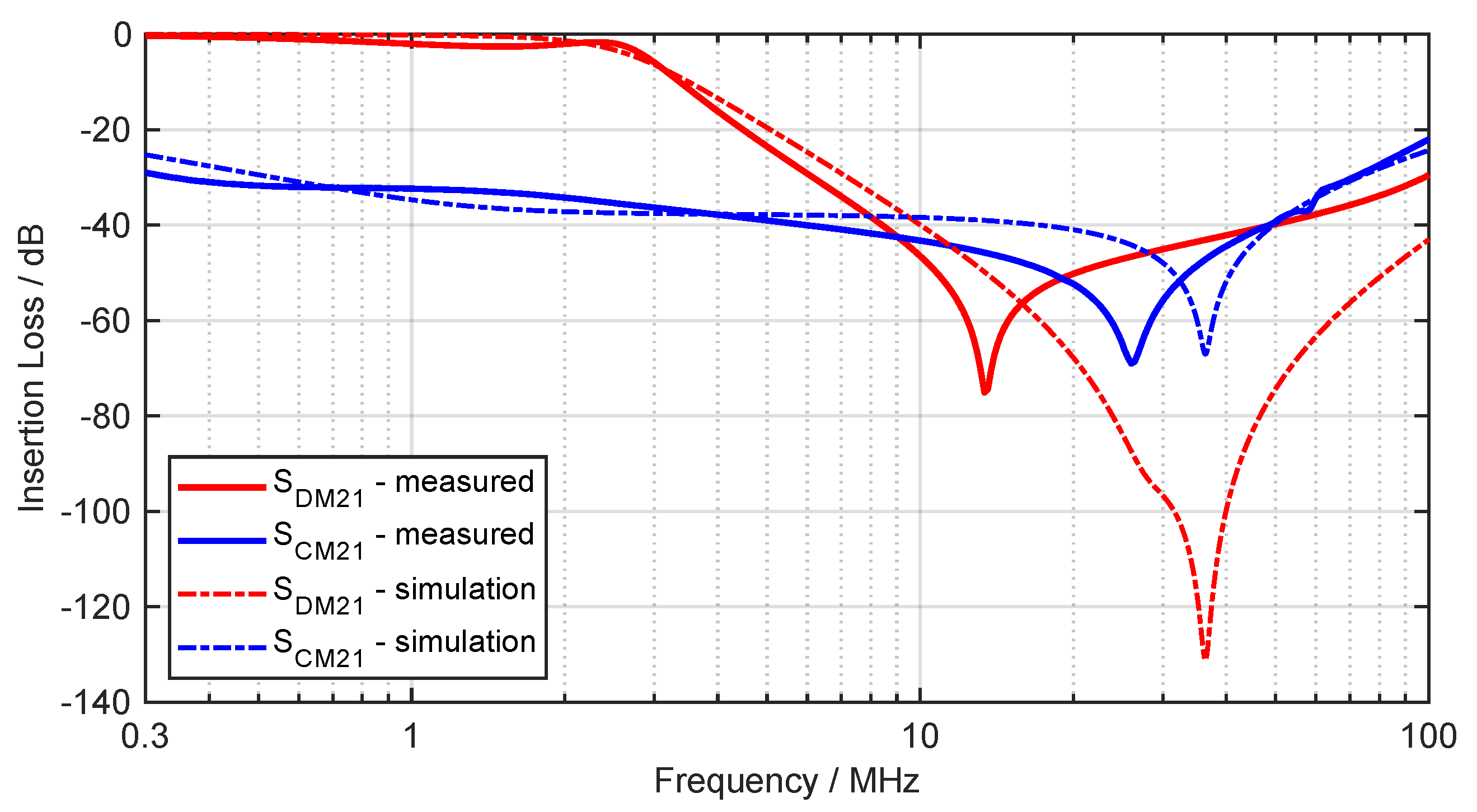
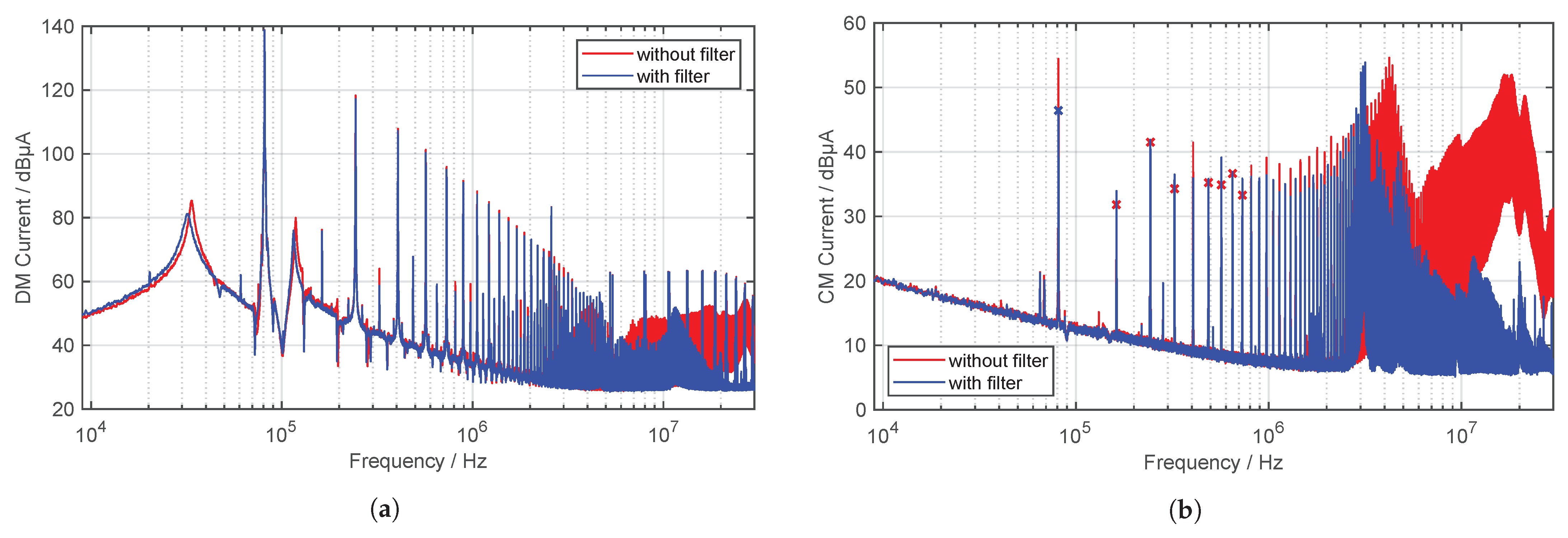
5.1. Filtering Measures
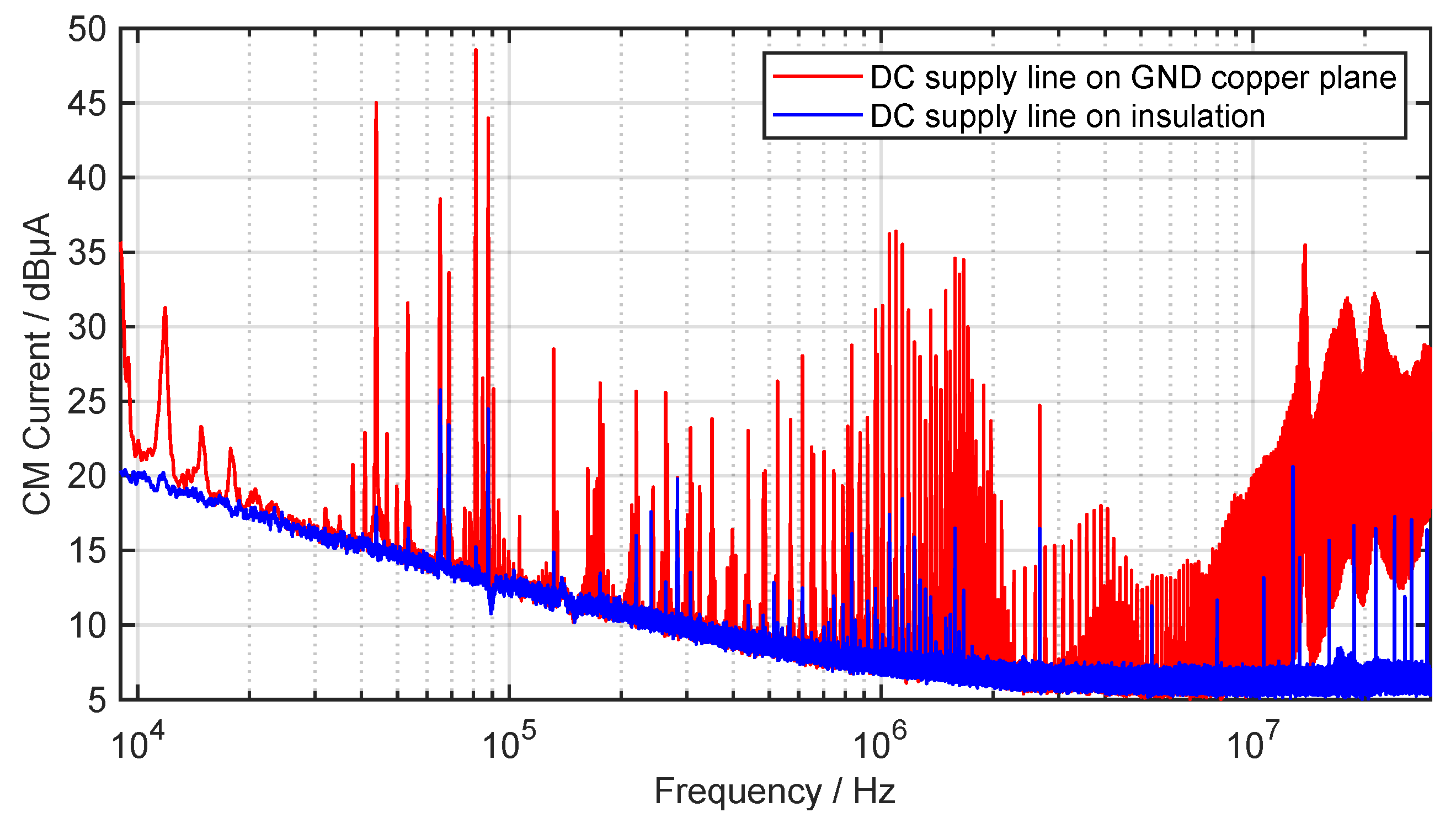
5.2. Influence of the DC Supply Line
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Noeren, J.; Parspour, N.; Elbracht, L. An easily scalable dynamic wireless power transfer system for electric vehicles. Energies 2023, 16, 3936. [Google Scholar] [CrossRef]
- Xue, L.; Galigekere, V.; Su, G.j.; Zeng, R.; Mohammad, M.; Gurpinar, E.; Chowdhury, S.; Onar, O. Design and Analysis of a 200 kW Dynamic Wireless Charging System for Electric Vehicles. In Proceedings of the 2022 IEEE Applied Power Electronics Conference and Exposition (APEC), Houston, TX, USA, 20–24 March 2022; pp. 1096–1103. [Google Scholar]
- Jiang, L.; Liu, H.; Zhang, X. Analysis on EMC influencing factors of electric vehicle wireless charging system. In Proceedings of the 2021 IEEE International Joint EMC/SI/PI and EMC Europe Symposium, Raleigh, NC, USA, 26 July–13 August 2021; pp. 285–290. [Google Scholar]
- Grazian, F.; Shi, W.; Dong, J.; van Duijsen, P.; Soeiro, T.B.; Bauer, P. Survey on Standards and Regulations for Wireless Charging of Electric Vehicles. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; pp. 1–5. [Google Scholar]
- Jiang, L.; Liu, H.; Wang, C. Summary of EMC Test Standards for Wireless Power Transfer Systems of Electric Vehicles. In Proceedings of the 2021 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Bali, Indonesia, 27–30 September 2021; pp. 1–4. [Google Scholar]
- Obayashi, S.; Tsukahara, H. EMC issues on wireless power transfer. In Proceedings of the 2014 International Symposium on Electromagnetic Compatibility, Tokyo, Japan, 12–16 May 2014; pp. 601–604. [Google Scholar]
- Ziegler, C.; Beck, F. Entwicklung eines Messaufbaus zur Charakterisierung der WPT-Systemkomponenten nach CISPR 25 und CISPR 11. In Proceedings of the EMV: Internationale Fachmesse und Kongress für Elektromagnetische Verträglichkeit, Dusseldorf, Germany, 23–25 February 2016; pp. 377–384. [Google Scholar]
- Willmann, B.; Cuartielles Ruiz, D.; Vick, R. Wireless Power Transfer-Stand der Normungsaktivitäten. In Proceedings of the EMV: Internationale Fachmesse und Kongress für Elektromagnetische Verträglichkeit, Dusseldorf, Germany, 20–22 February 2018; pp. 359–367. [Google Scholar]
- Ziegler, C.; Weber, S.; Heiland, G. Propagation Paths and Filter Methods for Common Mode (CM) Currents in WPT systems for Electrical Vehicles (EV). In Proceedings of the PCIM Europe 2019; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 7–9 May 2019; pp. 1–7. [Google Scholar]
- Ziegler, C.; Weber, S.; Heiland, G. Ursache von Gleichtaktstörströmen in induktiven Ladesystemen (WPT-Systeme) und Vergleich zwischen gemessenen Störströmen mit der Feldstärkemessung. In Proceedings of the EMV: Internationale Fachmesse und Kongress für Elektromagnetische Verträglichkeit, Cologne, Germany, 17–19 March 2020; pp. 37–45. [Google Scholar]
- Zhai, L.; Cao, Y.; Lin, L.; Zhang, T.; Kavuma, S. Mitigation conducted emission strategy based on transfer function from a DC-Fed wireless charging system for electric vehicles. Energies 2018, 11, 477. [Google Scholar] [CrossRef]
- Simonazzi, M.; Sandrolini, L. Conducted Emission Analysis of a Near-Field Wireless Power Transfer System. In Proceedings of the 2021 IEEE 15th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Florence, Italy, 14–16 July 2021; pp. 1–6. [Google Scholar]
- Jeschke, S.; Maarleveld, M.; Baerenfaenger, J.; Schmuelling, B.; Burkert, A. Challenges in EMC Testing of EV and EVSE Equipment for Inductive Charging. In Proceedings of the 2018 International Symposium on Electromagnetic Compatibility (EMC EUROPE), Amsterdam, The Netherlands, 27–30 August 2018; pp. 967–971. [Google Scholar]
- Haug, M.; Beltle, M.; Tenbohlen, S. Magnetic Field Emission of Automotive Inductive Charging Systems in the 9 kHz–30 MHz Range. In Proceedings of the 2021 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Bali, Indonesia, 27–30 September 2021; pp. 1–4. [Google Scholar]
- Haug, M.; Beltle, M.; Tenbohlen, S. Modellierung von Wireless Power Transfer (WPT) Systemen zur Analyse der magnetischen Feldemissionen. In Proceedings of the EMV: Internationale Fachmesse und Kongress für Elektromagnetische Verträglichkeit, Cologne, Germany, 17–19 March 2020; pp. 47–54. [Google Scholar]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Magnetic field during wireless charging in an electric vehicle according to standard SAE J2954. Energies 2019, 12, 1795. [Google Scholar] [CrossRef]
- Hu, J.; Xu, X.; Zheng, T.; Lan, H.; Cao, D.; Liu, G. Experimental Study of Radiated Magnetic Field from Electric Vehicle Wireless Charging System. IEEE Electromagn. Compat. Mag. 2021, 10, 46–51. [Google Scholar] [CrossRef]
- Kuerschner, D.; Ombach, G.; Percebon, L.; Mathar, S. Magnetic leakage field study of a 7 kW wireless electric vehicle charging system. World Electr. Veh. J. 2016, 8, 501–510. [Google Scholar] [CrossRef]
- Jeschke, S.; Maarleveld, M.; Baerenfaenger, J.; Hirsch, H.; Tsiapenko, S.; Waldera, C.; Obholz, M. Development of a passive impedance network for modeling electric vehicle traction batteries for EMI measurements. In Proceedings of the 2017 International Symposium on Electromagnetic Compatibility—EMC EUROPE, Angers, France, 4–7 September 2017; pp. 1–6. [Google Scholar]
- Haug, M.; Beltle, M.; Tenbohlen, S. Grundlegende Betrachtungen der Kopplungsmechanismen möglicher Störgrößen für induktive KFZ-Ladesysteme. In Proceedings of the EMV: Internationale Fachmesse und Kongress für Elektromagnetische Verträglichkeit, Dusseldorf, Germany, 20–22 February 2018; pp. 548–555. [Google Scholar]
- SAE J2954; Wireless Power Transfer for Light-Duty Plug-In/Electric Vehicles and Alignment Methodology. SAE International: Warrendale, PA, USA, 2022.
- CIS/B/687/CDV; Amendment 2 Fragment 1 to CISPR 11 Ed. 6: Industrial, Scientific and Medical Equipment—Radio-Frequency Disturbance Characteristics—Limits and Methods of Measurement —Requirements for Air-Gap Wireless Power Transfer (WPT). CISPR: Geneva, Switzerland, 2017.
- Okasili, I.; Elkhateb, A.; Littler, T. A review of wireless power transfer systems for electric vehicle battery charging with a focus on inductive coupling. Electronics 2022, 11, 1355. [Google Scholar] [CrossRef]
- Feng, H.; Tavakoli, R.; Onar, O.C.; Pantic, Z. Advances in High-Power Wireless Charging Systems: Overview and Design Considerations. IEEE Trans. Transp. Electrif. 2020, 6, 886–919. [Google Scholar] [CrossRef]
- Wang, C.S.; Stielau, O.; Covic, G. Design considerations for a contactless electric vehicle battery charger. IEEE Trans. Ind. Electron. 2005, 52, 1308–1314. [Google Scholar] [CrossRef]
- Bi, Z.; Kan, T.; Mi, C.C.; Zhang, Y.; Zhao, Z.; Keoleian, G.A. A review of wireless power transfer for electric vehicles: Prospects to enhance sustainable mobility. Appl. Energy 2016, 179, 413–425. [Google Scholar] [CrossRef]
- Zhang, W.; Mi, C.C. Compensation Topologies of High-Power Wireless Power Transfer Systems. IEEE Trans. Veh. Technol. 2016, 65, 4768–4778. [Google Scholar] [CrossRef]
- Sallan, J.; Villa, J.L.; Llombart, A.; Sanz, J.F. Optimal Design of ICPT Systems Applied to Electric Vehicle Battery Charge. IEEE Trans. Ind. Electron. 2009, 56, 2140–2149. [Google Scholar] [CrossRef]
- Aditya, K.; Williamson, S.S. Comparative study of Series-Series and Series-Parallel compensation topologies for electric vehicle charging. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 426–430. [Google Scholar]
- Villa, J.L.; Sallan, J.; Sanz Osorio, J.F.; Llombart, A. High-Misalignment Tolerant Compensation Topology For ICPT Systems. IEEE Trans. Ind. Electron. 2012, 59, 945–951. [Google Scholar] [CrossRef]
- Wang, C.S.; Covic, G.; Stielau, O. Power transfer capability and bifurcation phenomena of loosely coupled inductive power transfer systems. IEEE Trans. Ind. Electron. 2004, 51, 148–157. [Google Scholar] [CrossRef]
- Vu, V.B.; Ramezani, A.; Triviño, A.; González-González, J.M.; Kadandani, N.B.; Dahidah, M.; Pickert, V.; Narimani, M.; Aguado, J. Operation of Inductive Charging Systems Under Misalignment Conditions: A Review for Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 1857–1887. [Google Scholar] [CrossRef]
- Patil, D.; McDonough, M.K.; Miller, J.M.; Fahimi, B.; Balsara, P.T. Wireless Power Transfer for Vehicular Applications: Overview and Challenges. IEEE Trans. Transp. Electrif. 2018, 4, 3–37. [Google Scholar] [CrossRef]
- Wang, Y.; Yao, Y.; Liu, X.; Xu, D. S/CLC Compensation Topology Analysis and Circular Coil Design for Wireless Power Transfer. IEEE Trans. Transp. Electrif. 2017, 3, 496–507. [Google Scholar] [CrossRef]
- Song, K.; Li, Z.; Jiang, J.; Zhu, C. Constant Current/Voltage Charging Operation for Series–Series and Series–Parallel Compensated Wireless Power Transfer Systems Employing Primary-Side Controller. IEEE Trans. Power Electron. 2018, 33, 8065–8080. [Google Scholar] [CrossRef]
- Qu, X.; Han, H.; Wong, S.C.; Tse, C.K.; Chen, W. Hybrid IPT Topologies With Constant Current or Constant Voltage Output for Battery Charging Applications. IEEE Trans. Power Electron. 2015, 30, 6329–6337. [Google Scholar] [CrossRef]
- Triviño, A.; González-González, J.M.; Aguado, J.A. Wireless power transfer technologies applied to electric vehicles: A review. Energies 2021, 14, 1547. [Google Scholar] [CrossRef]
- Wang, Y.; Xiong, M.; Wang, X.; Li, Q.; Jiang, Z.; Wei, X.; Dai, H. Research on 11kW Wireless Charging System for Electric Vehicle Based on LCC-SP Topology and Current Doubler. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 820–827. [Google Scholar]
- Yang, J.; Zhang, X.; Zhang, K.; Cui, X.; Jiao, C.; Yang, X. An LCC-SP Compensated Inductive Power Transfer System and Design Considerations for Enhancing Misalignment Tolerance. IEEE Access 2020, 8, 193285–193296. [Google Scholar] [CrossRef]
- González-González, J.M.; Triviño-Cabrera, A.; Aguado, J.A. Assessment of the Power Losses in a SAE J2954-Compliant Wireless Charger. IEEE Access 2022, 10, 54474–54483. [Google Scholar] [CrossRef]
- Hazra, S.; De, A.; Cheng, L.; Palmour, J.; Schupbach, M.; Hull, B.A.; Allen, S.; Bhattacharya, S. High Switching Performance of 1700-V, 50-A SiC Power MOSFET Over Si IGBT/BiMOSFET for Advanced Power Conversion Applications. IEEE Trans. Power Electron. 2016, 31, 4742–4754. [Google Scholar]
- Namin, A.; Chaidee, E.; Sriprom, T.; Bencha, P. Performance of Inductive Wireless Power Transfer Between Using Pure Sine Wave and Square Wave Inverters. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Bangkok, Thailand, 6–9 June 2018; pp. 1–5. [Google Scholar]
- Zou, S.; Onar, O.C.; Galigekere, V.; Pries, J.; Su, G.J.; Khaligh, A. Secondary Active Rectifier Control Scheme for a Wireless Power Transfer System with Double-Sided LCC Compensation Topology. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2145–2150. [Google Scholar]
- Kim, H.; Jeong, S.; Kim, D.H.; Kim, J.; Kim, Y.I.; Kim, I.M. Selective harmonic elimination method of radiation noise from automotive wireless power transfer system using active rectifier. In Proceedings of the 2016 IEEE 25th Conference on Electrical Performance Of Electronic Packaging And Systems (EPEPS), San Diego, CA, USA, 23–26 October 2016; pp. 161–164. [Google Scholar]
- Wang, Y.; Yao, Y.; Liu, X.; Xu, D.; Cai, L. An LC/S Compensation Topology and Coil Design Technique for Wireless Power Transfer. IEEE Trans. Power Electron. 2018, 33, 2007–2025. [Google Scholar] [CrossRef]
- Steigerwald, R. A comparison of half-bridge resonant converter topologies. IEEE Trans. Power Electron. 1988, 3, 174–182. [Google Scholar] [CrossRef]
- IEC 61980-1; Electric Vehicle Wireless Power Transfer (WPT) Systems—Part 1: General Requirements. IEC: Geneva, Switzerland, 2020.
- IEC 61980-2; Electric Vehicle Wireless Power Transfer (WPT) Systems—Part 2: Specific Requirements for MF-WPT System Communication and Activities. IEC: Geneva, Switzerland, 2023.
- IEC 61980-3; Electric Vehicle Wireless Power Transfer (WPT) Systems—Part 3: Specific Requirements for Magnetic Field Wireless Power Transfer Systems. IEC: Geneva, Switzerland, 2022.
- CISPR 11:2015+AMD1:2016+AMD2:2019; Industrial, Scientific and Medical Equipment— Radio-Frequency Disturbance Characteristics–Limits and Methods of Measurement. CISPR: Geneva, Switzerland, 2019.
- ISO 19363; Electrically Propelled Road Vehicles—Magnetic Field Wireless Power Transfer — Safety and Interoperability Requirements. ISO: Geneva, Switzerland, 2020.
- Samanchuen, T.; Jirasereeamornkul, K.; Ekkaravarodome, C.; Singhavilai, T. A Review of Wireless Power Transfer for Electric Vehicles: Technologies and Standards. In Proceedings of the 2019 4th Technology Innovation Management and Engineering Science International Conference (TIMES-iCON), Bangkok, Thailand, 11–13 December 2019; pp. 1–5. [Google Scholar]
- Jeschke, S.; Maarleveld, M.; Bärenfänger, J.; Burkert, A.; Schmülling, B. Entwicklung einer Ersatzlast zur Nachbildung des Fahrzeugs bei Emissionsmessungen an induktiven Ladesystemen. In Proceedings of the EMV: Internationale Fachmesse und Kongress für Elektromagnetische Verträglichkeit, Cologne, Germany, 17–19 March 2020; pp. 55–62. [Google Scholar]
- Jeschke, S.; Olbrich, M.; Kleinen, M.; Bärenfänger, J. Untersuchung der Koppelimpedanz von induktiven Ladesystemen zur Quantifizierung der Einkopplung von Burst und Surge Impulsen. In Proceedings of the EMV Kongress 2022, Cologne, Germany, 12–14 July 2022; pp. 245–252. [Google Scholar]
- Zhai, L.; Zhong, G.; Cao, Y.; Hu, G.; Li, X. Research on magnetic field distribution and characteristics of a 3.7 kW wireless charging system for electric vehicles under offset. Energies 2019, 12, 392. [Google Scholar] [CrossRef]
- ETSI EN 303417; Wireless Power Transmission Systems, Using Technologies Other Than Radio Frequency Beam in the 19–21 kHz, 59–61 kHz, 79–90 kHz, 100–300 kHz, 6765–6795 kHz Ranges. Harmonised Standard Covering the Essential Requirements of Article 3.2 of Directive 2014/53/EU. ETSI: Sophia Antipolis, France, 2017.
- Jettanasen, C.; Ngaopitakkul, A. The conducted emission attenuation of micro-inverters for nanogrid systems. Sustainability 2019, 12, 151. [Google Scholar] [CrossRef]
- Jiraprasertwong, J.; Jettanasen, C. Practical design of a passive EMI filter for reduction of EMI generation. In Proceedings of the International Multi Conference of Engineers and Computer Scientists 2015 Vol II, IMECS 2015, Hong Kong, 18–20 March 2015. [Google Scholar]
- Kien Trung, N.; Akatsu, K. Ringing suppressing method in 13.56 MHz resonant inverter for wireless power transfer systems. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 2275–2281. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | Value |
|---|---|
| Coupling coefficient k | 0.2675 |
| Primary coil inductance | |
| Secondary coil inductance | |
| Primary compensation inductance | |
| Primary parallel compensation capacitor | |
| Primary series compensation capacitor | |
| Secondary parallel compensation capacitor | |
| Secondary series compensation capacitor | |
| Load resistance |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sulejmani, E.; Beltle, M.; Tenbohlen, S. EMC of Inductive Automotive Charging Systems According to Standard SAE J2954. Vehicles 2023, 5, 1532-1552. https://doi.org/10.3390/vehicles5040083
Sulejmani E, Beltle M, Tenbohlen S. EMC of Inductive Automotive Charging Systems According to Standard SAE J2954. Vehicles. 2023; 5(4):1532-1552. https://doi.org/10.3390/vehicles5040083
Chicago/Turabian StyleSulejmani, Emir, Michael Beltle, and Stefan Tenbohlen. 2023. "EMC of Inductive Automotive Charging Systems According to Standard SAE J2954" Vehicles 5, no. 4: 1532-1552. https://doi.org/10.3390/vehicles5040083