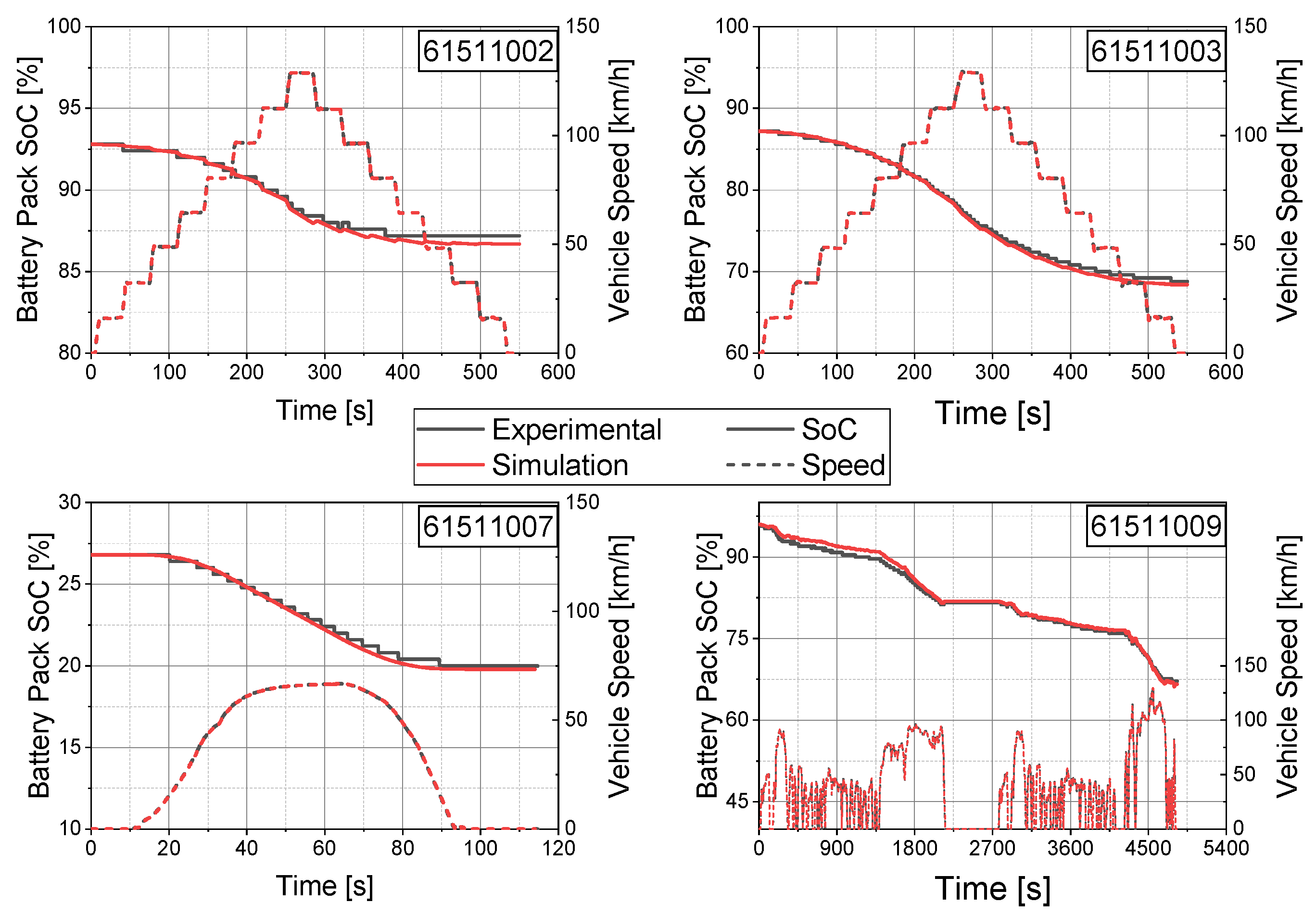
This section reports and discusses the main results obtained by the numerical investigations. First, the results of the base model validation are presented. Then, the performances and cost assessment of the two investigated BS-HESS systems are compared to the base configuration without the SC.
3.2. BS-HESS Investigation
This section compares two BS-HESS topologies in terms of ageing using metrics such as the capacity and ohmic losses, maximum, minimum, and RMS BP currents, and costs.
As is known, the ESS hybridization effectiveness depends on many factors, such as the BP and SC characteristics, EMS, and mission profiles [
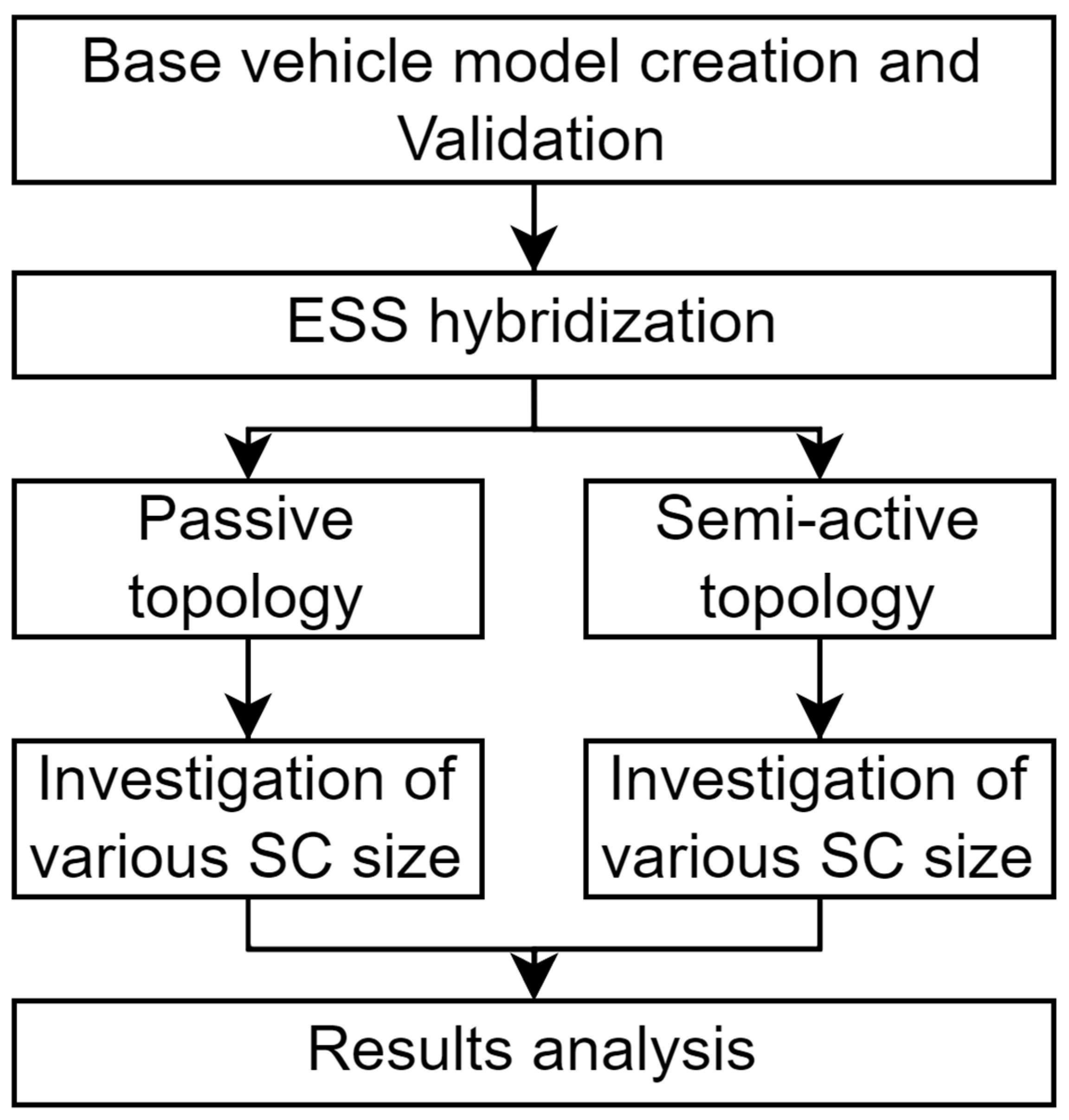
47]. Different driving cycles have been tested to assess the mission profile influence, characterised by high slope conditions, passing manoeuvres, and real driving cycles. A sweep of the SC size from 0.05 to 6.8 kWh was carried out at constant BP capacity. The BP and EMS tuning parameters were kept constant, while the SC characteristics were varied, assuming that the size increase was achieved by increasing the capacitance.
Regarding the predicted capacity loss, the sweep results are reported in
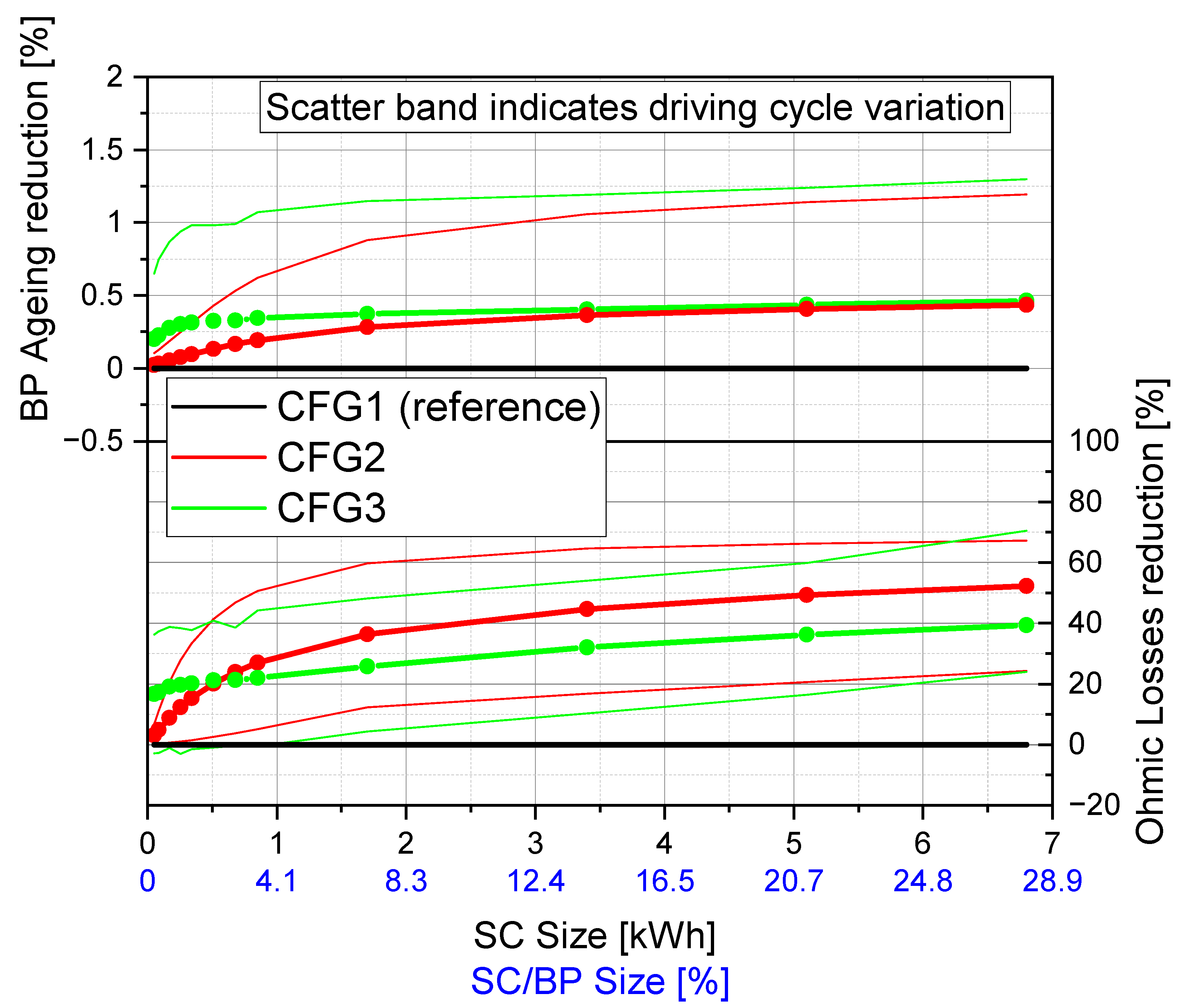
Figure 12. The continuous line is the mean value, while the scatter band indicates the variation among driving cycles, showing the minimum and the maximum values obtained. A reduction in up to 1.25% on a specific driving cycle and 0.5% on average were achieved with high SC capacities, while a 0.25% capacity loss reduction was achieved in the most interesting area, characterised by a SC size less than 1 kWh. The displayed trend was expected to be a “U” shaped function of the SC size [
20]. However, for the particular case adopted, linked to the electrical properties of the HESS, the found average had a decreasing trend, but the slope tended to become flatter.
The sweep of the SC size was stopped around a value of 7 kWh (about one-third of the BP size) since a higher value seems unreasonable for a BS-HESS system since the main energy source should be the BP.
The best ageing reduction performance is shown by CFG3, as shown by analysing the trends in
Figure 11. For both configurations, as soon as the SC capacity overcame 8–10% of the BP one, the trend was quite flat, and no further improvements were expected by increasing the SC size, and the optimisation goal should have only been oriented to the performances. In this regard, Ostadi et al., found that the optimal energy share of an SC system is 17% from an optimisation of the sizing of SC and BP [
45]. The CFG3, especially in the region of small SC sizes of less than 3 kWh, showed a longer battery life. For further smaller SC sizes lower than 0.5 kWh, the battery ageing was reduced by about one order of magnitude compared to CFG2.
This is an important aspect considering that in recent years the cost reduction in the BP has been higher than the SC ones. Thus, the optimal SC/BP size ratio has to be defined through the cost/efficiency trade-off.
As seen in
Figure 12, the HESS can reduce the BP ohmic losses, assuring a reduction in the energy consumption [
48]. A comparison of the CFG2 energy consumption reduction in comparison to CFG1 was evaluated. Reductions of −1.1%, −1.5%, and −2.4% can be achieved on average, with SC sizes of 0.34, 0.68, and 1.7 kWh, respectively. The lower energy consumption was mainly linked to the reduction in the ohmic losses of the battery, which, for the presented SC sizes, varied between 25% and 42%, in line with literature results [
49]. It is worth highlighting that the ohmic losses were proportional to the square of the current and were directly proportional to the internal resistance, and the SCs have an order of magnitude smaller internal resistance, with a consequent ohmic losses reduction. Regarding the driving cycle influence, the BS-HESS in the real driving cycle conditions was less effective than its operation under 61511009 and 61511020 tests, composed of UDDS, HWY, and US06 homologation driving cycles.
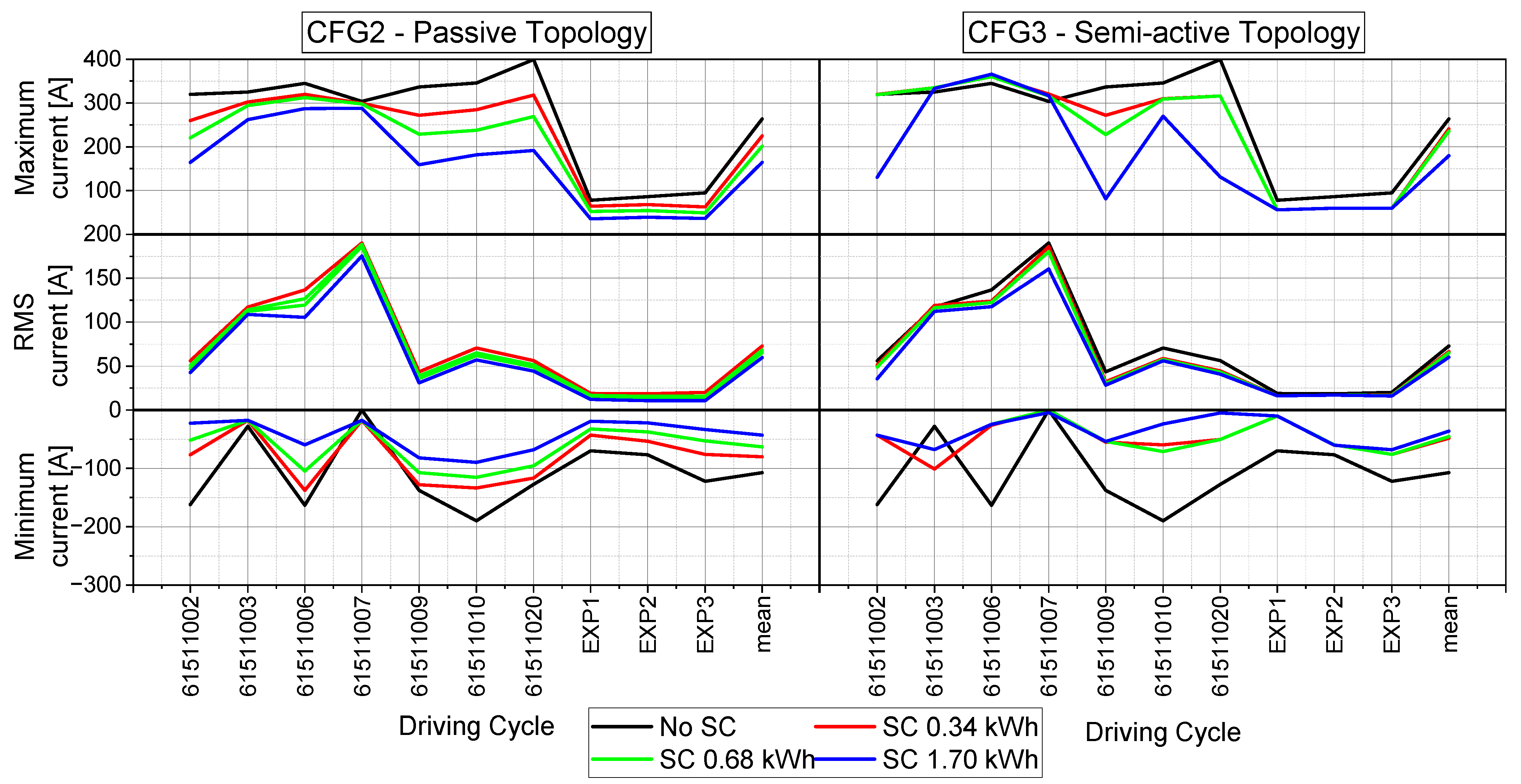
Looking at smaller SC sizes, the SC capacity of about 1.5%, 3%, and 7% have been investigated for the following analyses. In the following, currents exchanged from the BP are analysed. As is known, they are strictly involved in cycling ageing [
43]. In this regard, the maximum, minimum, and RMS BP currents for each driving cycle are reported in
Figure 13 for both CFG2 and CGF3.
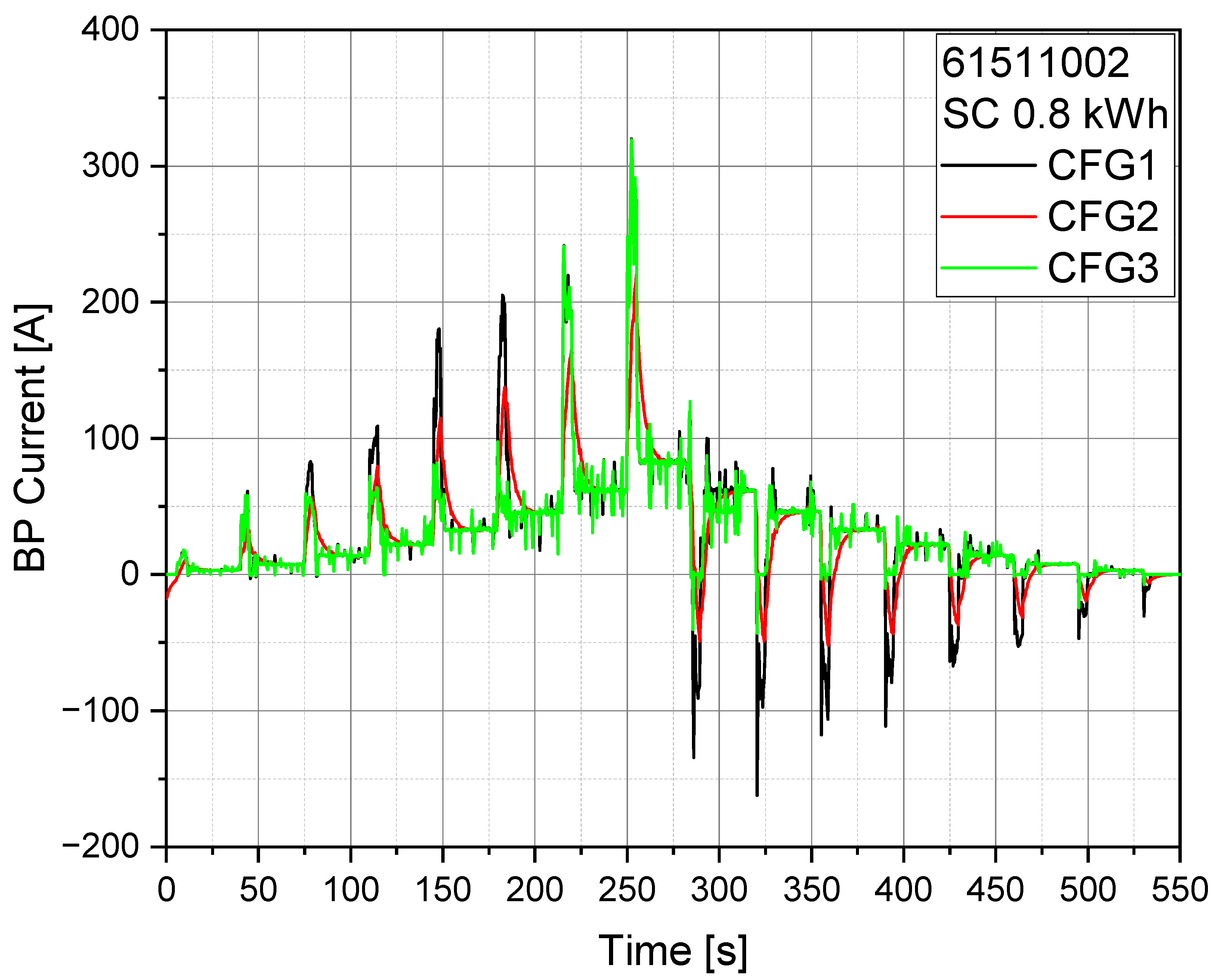
The maximum current was effectively reduced using CFG2, reaching mean values of about −16%, −27%, and −41% for each size considered. This trend was due to the reduced cut-off frequency of the BS-HESS. In fact, increasing the SC capacity size and keeping the internal resistance constant reduced the cut-off frequency of the SC, acting as a low-pass filter. The reduction was irrelevant in test 61611007 due to the high slope conditions, which required high power and were characterised by a very low-frequency current. In fact, the power request was high in this test condition, with fewer current peaks, and the HESS was less effective. The BP current related to driving cycle 61511002 and an SC of 0.8 kWh are reported in
Figure 14. The CFG3 reduced the current peak of the battery actively, at least until the SCs had enough residual
SoC. At a time of 250 s, the CFG3 was ineffective at reducing the peak due to the discharged SC, while the CFG2, which acted as a low-pass filter, did not suffer this problem. The trend was still valid for all the tested driving cycles. It is reasonable that a further optimised control strategy can effectively improve the performance of CFG3.
Regarding CFG3, the non-optimal nature of the rule-based BS-HESS EMS failed in some conditions in avoiding the current peaks. In particular, in some cases, the EMS-chosen discharge rate was such that the SC had already been discharged when the EM requested high power. This phenomenon led to lower peak reduction performances of the CFG3 and explained the non-uniform behaviour of the maximum current shown in
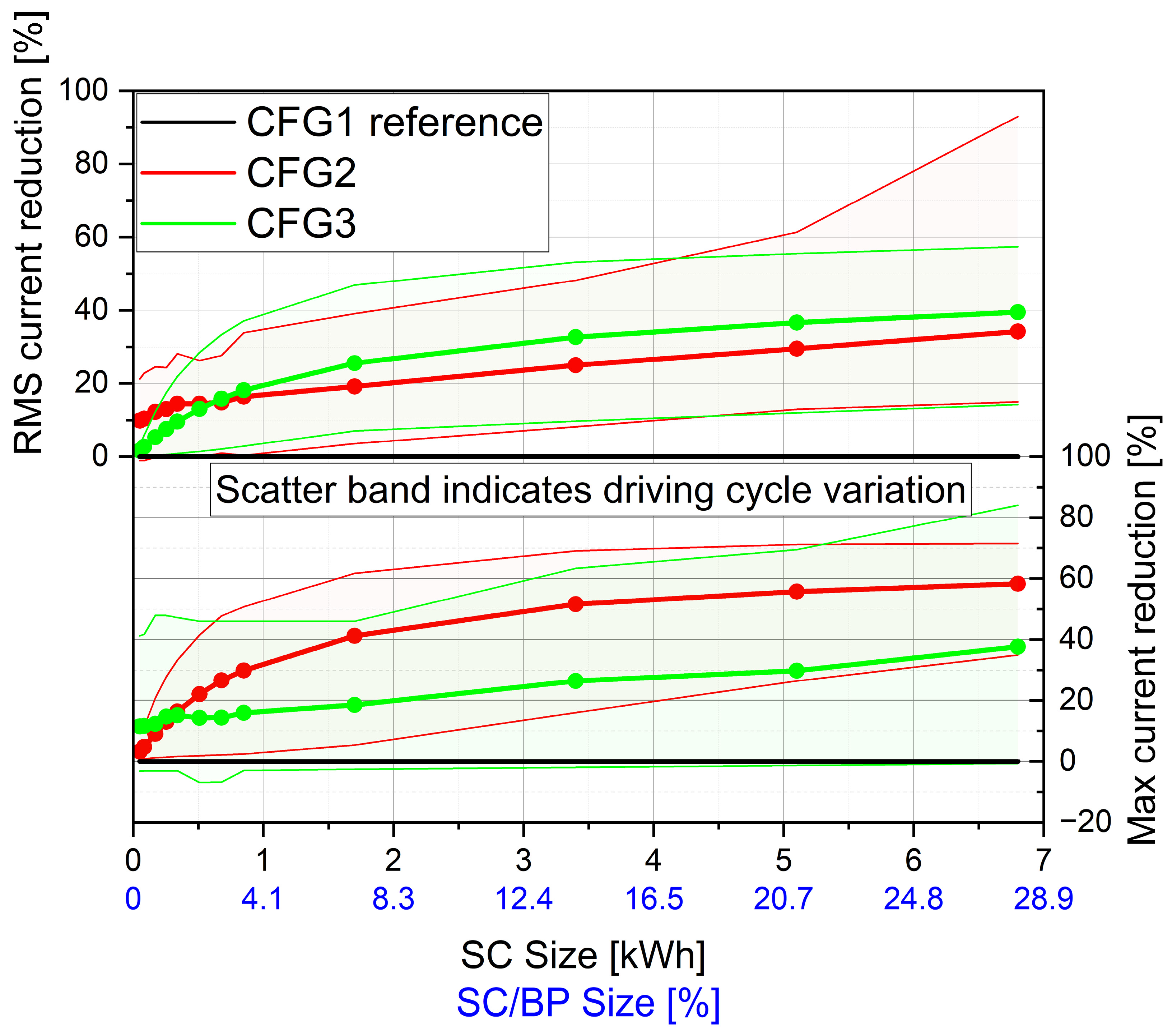
Figure 13. The non-optimality of the EMS was also confirmed by the average maximum current that varied with the SC size in
Figure 15, in which for SCs greater than 0.7 kWh, the CFG2 performed better.
The minimum current (i.e., BP charging) in
Figure 13 shows that the proposed EMS had higher minimum values with respect to CFG2. The minimum currents were linked to regenerative breaking conditions, so the CFG3 was more effective at recharging the SC when the EM was in braking mode. As previously discussed, this can effectively improve the vehicle energy efficiency. However, the more irregular trend of CFG3 is again a suggestion that the proposed strategy can be improved.
The RMS current parameter was typically assessed for performance evaluation in the case of HESS [
50].
Figure 15 shows the trends of the mean RMS and peak current reductions for both topologies. The trends between the two configurations were similar. The CFG2, due to its uncontrolled behaviour, had a smoother trend, while CFG3 showed some discontinuities. These were due to adopting the same tuning parameters for all the investigated SC sizes adopted, which could result in a non-optimal SC use. The CFG2 avoided the BP current peaks for all the explored SC ranges in every condition. The differences were negligible for SC sizes smaller than 0.3 kWh. For larger SC sizes and above 6.8 kWh, the average peak reduction was 56% and 37% for CFG2 and CFG3, respectively.
The RMS reduction for CFG3 was usually higher than for CFG2. However, for some specific SC sizes, the CFG2 performed better. This was due to the rule-based strategy of CFG3, which was not based on optimal control theory. Reductions of 33% and 46% were achieved for CFG2 and CFG3, respectively, aligned with the literature results. In fact, Vulturescu reported that the RMS current of the BP was reduced from 40 A to about 15 A (i.e., 63%) under the Artemis driving cycle [
42].
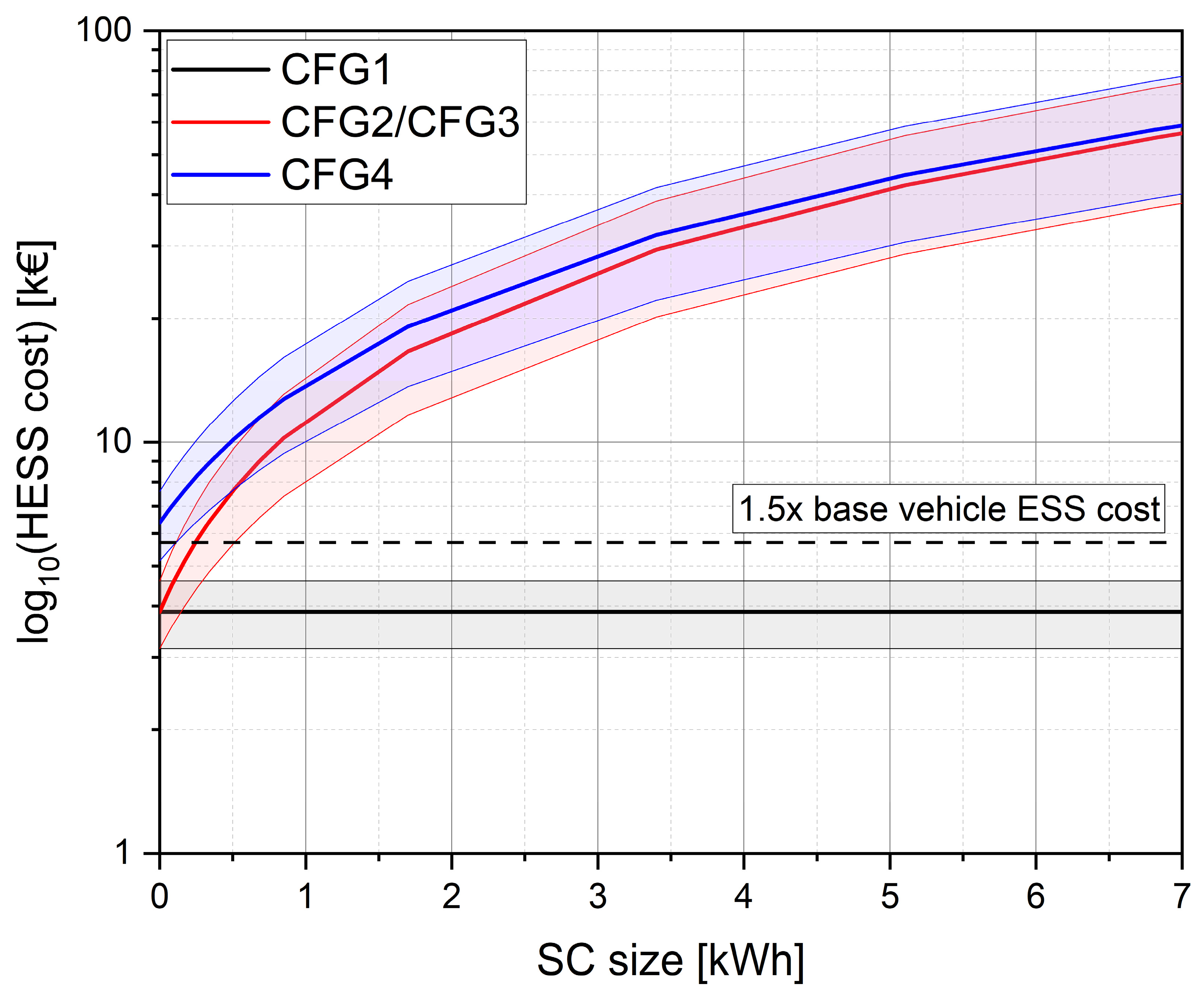
Finally, a cost assessment was carried out and reported in
Figure 16. The analysis shown relied on the assumption of converter and battery pack costs discussed in
Section 2 and a cost of SC in the range of 5–10 k€ [
51]. The control unit development and integration cost were not included. A logarithmic scale was used on the y-axis to better highlight the cost differences with smaller SC sizes. The scatter band indicated the uncertainty interval linked to the cost range assumed for the various components of the HESS system.
As discussed, a fully active HESS costs at least double the BP cost for a passenger car application. Limiting the cost of the HESS to 1.5 times the BP one, both for the passive and semi-active topologies, the maximum capacity of the SC could be 0.25 kWh, adopting the cost limit for one. However, as reported in
Figure 12, the latter assures about a seven times better battery ageing and three times Ohmic loss reductions. At the same time, it also has some margin for improvement with more sophisticated control strategies. So, in conclusion, from the analysis carried out, it is possible to assert that CFG2 is preferable to CFG1 due to better performances from both the battery ageing, energy loss, and cost perspectives.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}