
Stick–Slip Characteristic Analysis of High-Speed Train Brake Systems: A Disc–Block Friction System with Different Friction Radii


Abstract
:1. Introduction
2. Experimental Process
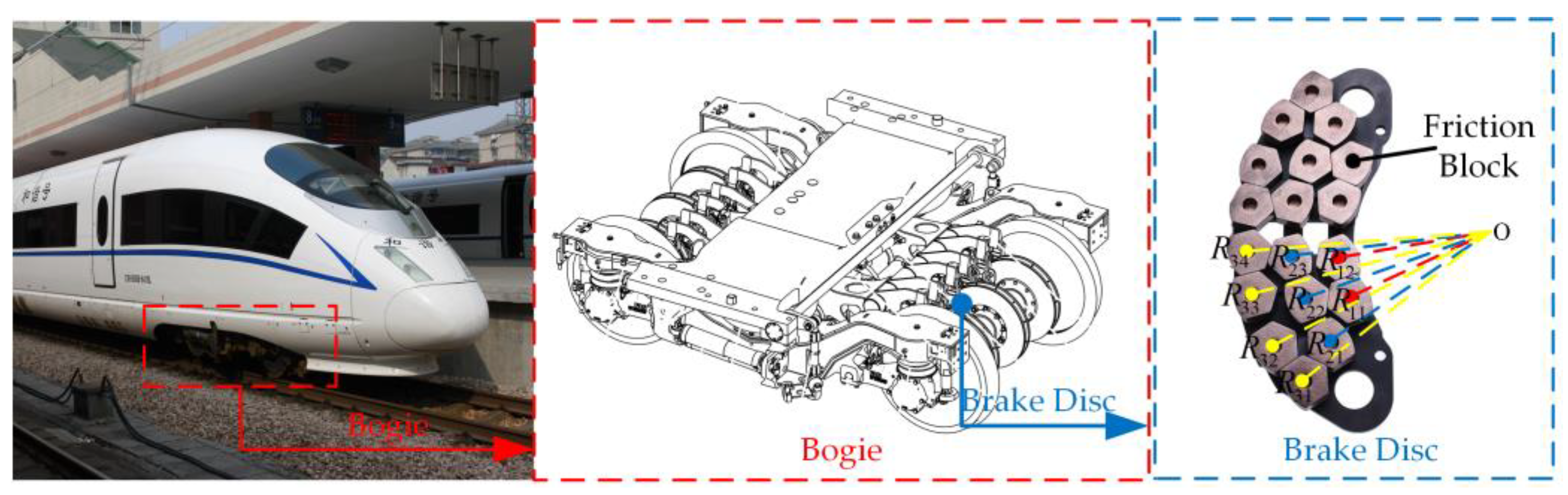
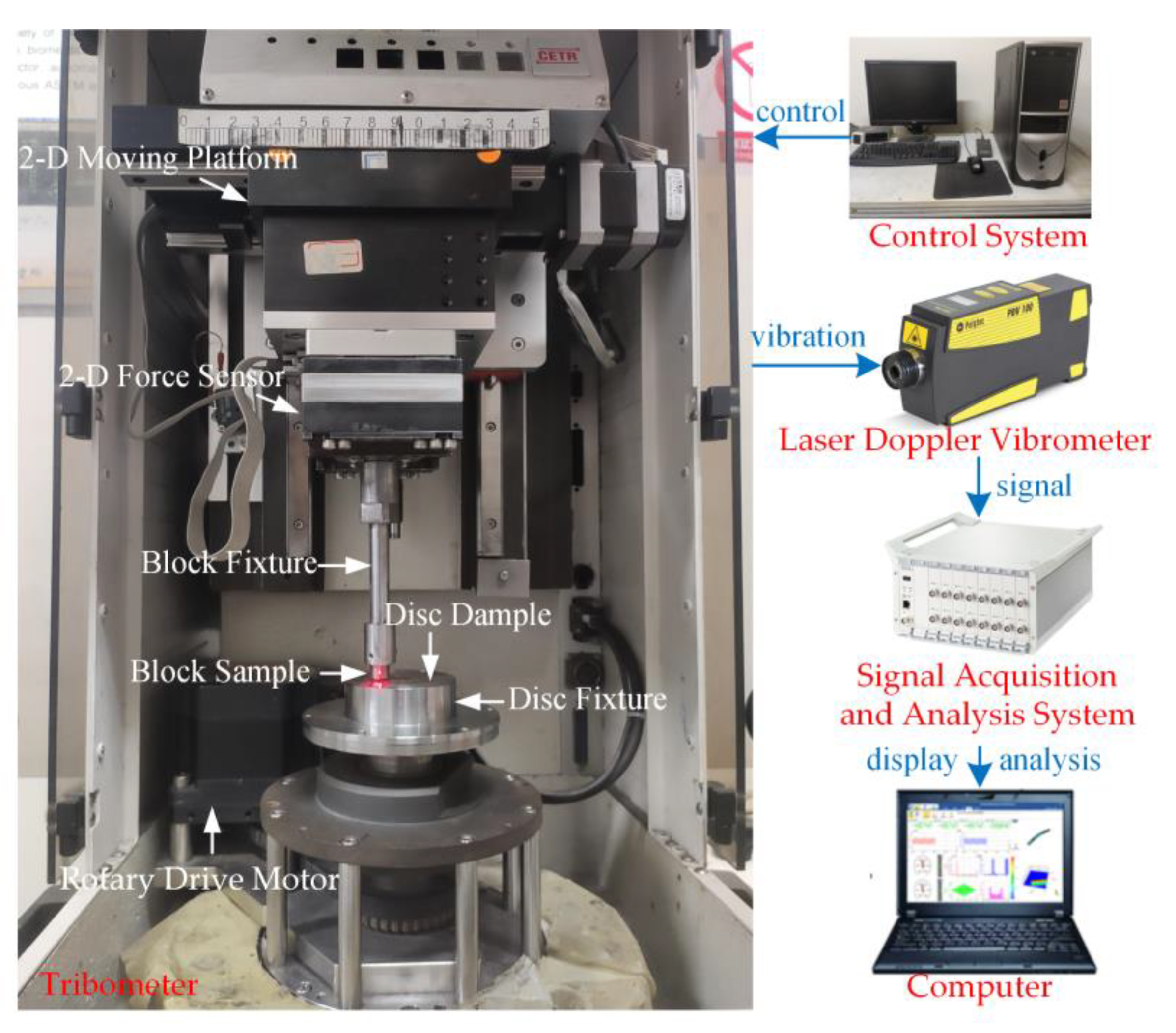
2.1. Experimental Device
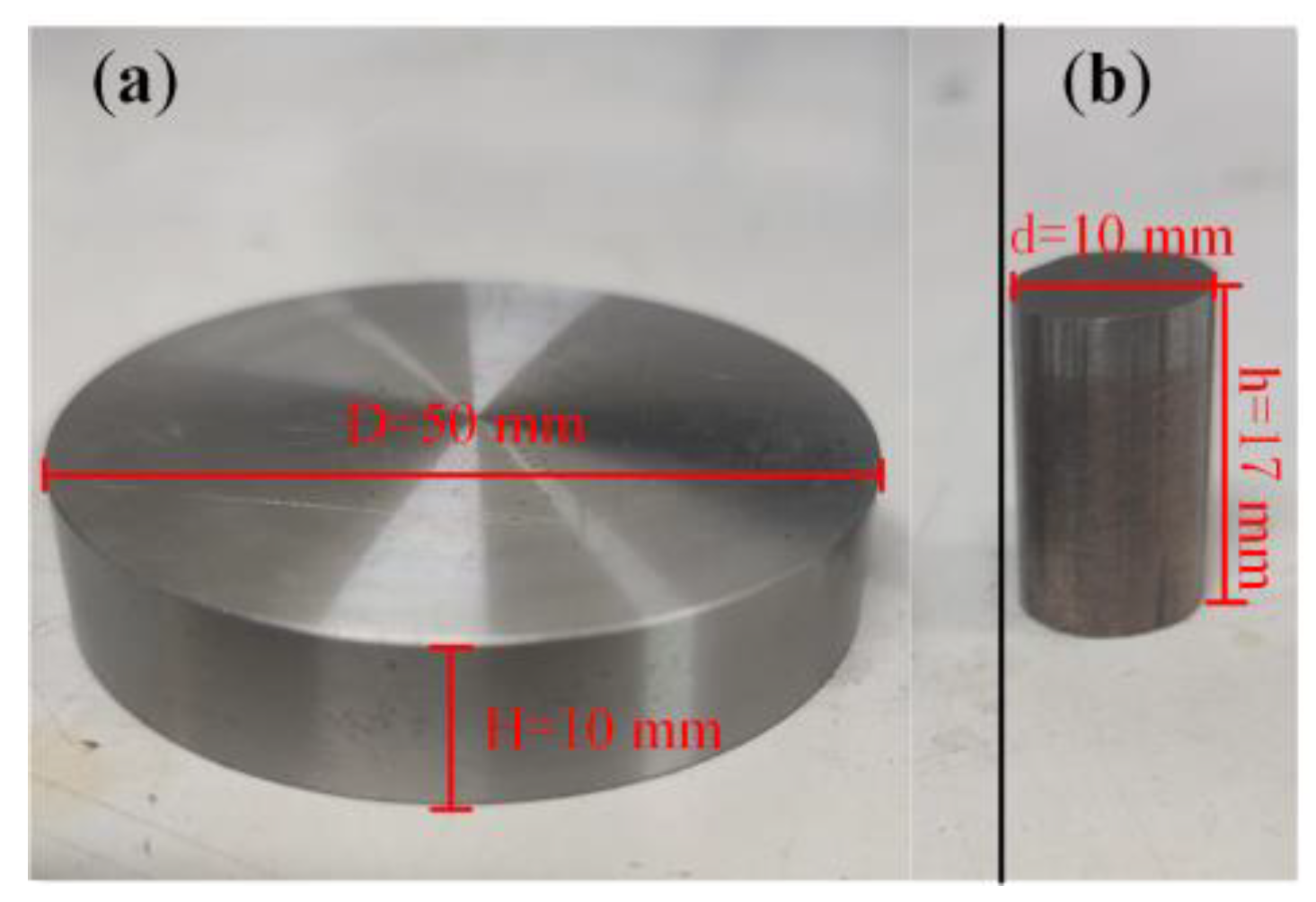
2.2. Experimental Samples
2.3. Experimental Step
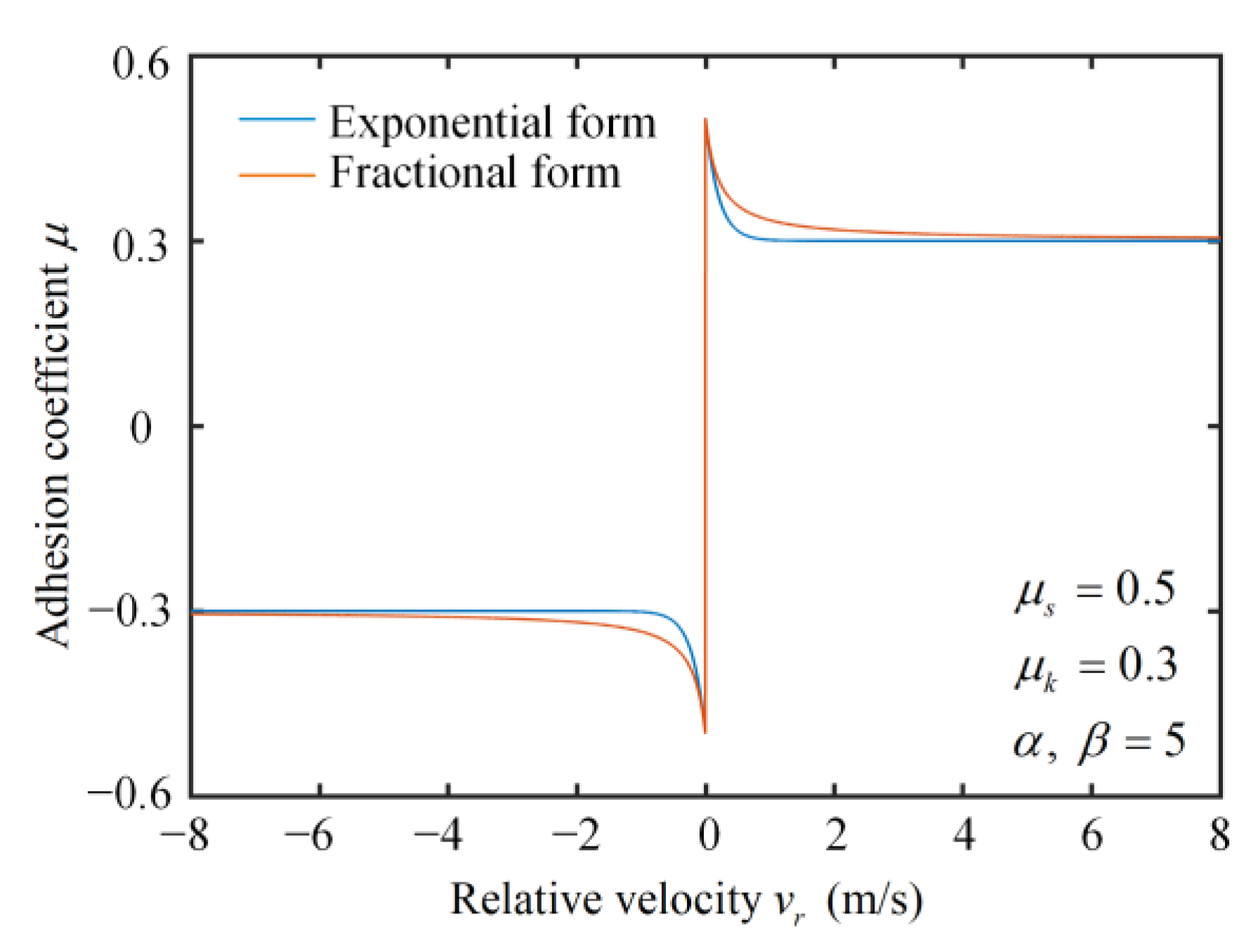
2.4. Stribeck Model
3. Experimental Results and Discussion
3.1. Analysis of Stick–Slip Vibration
3.2. Analysis of Friction Coefficient
3.3. Stribeck Model Parameter Identification

4. Conclusions
- (1).
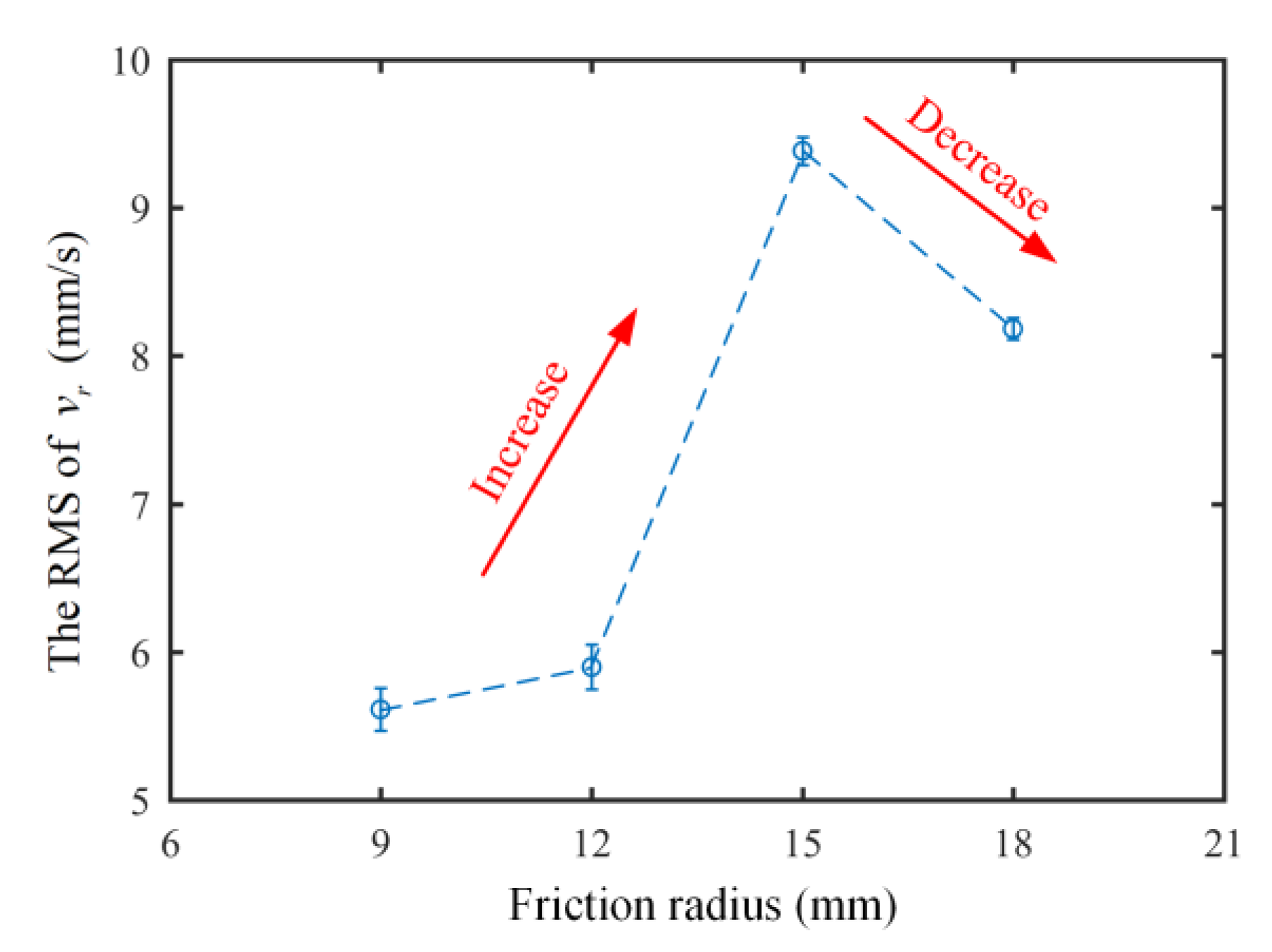
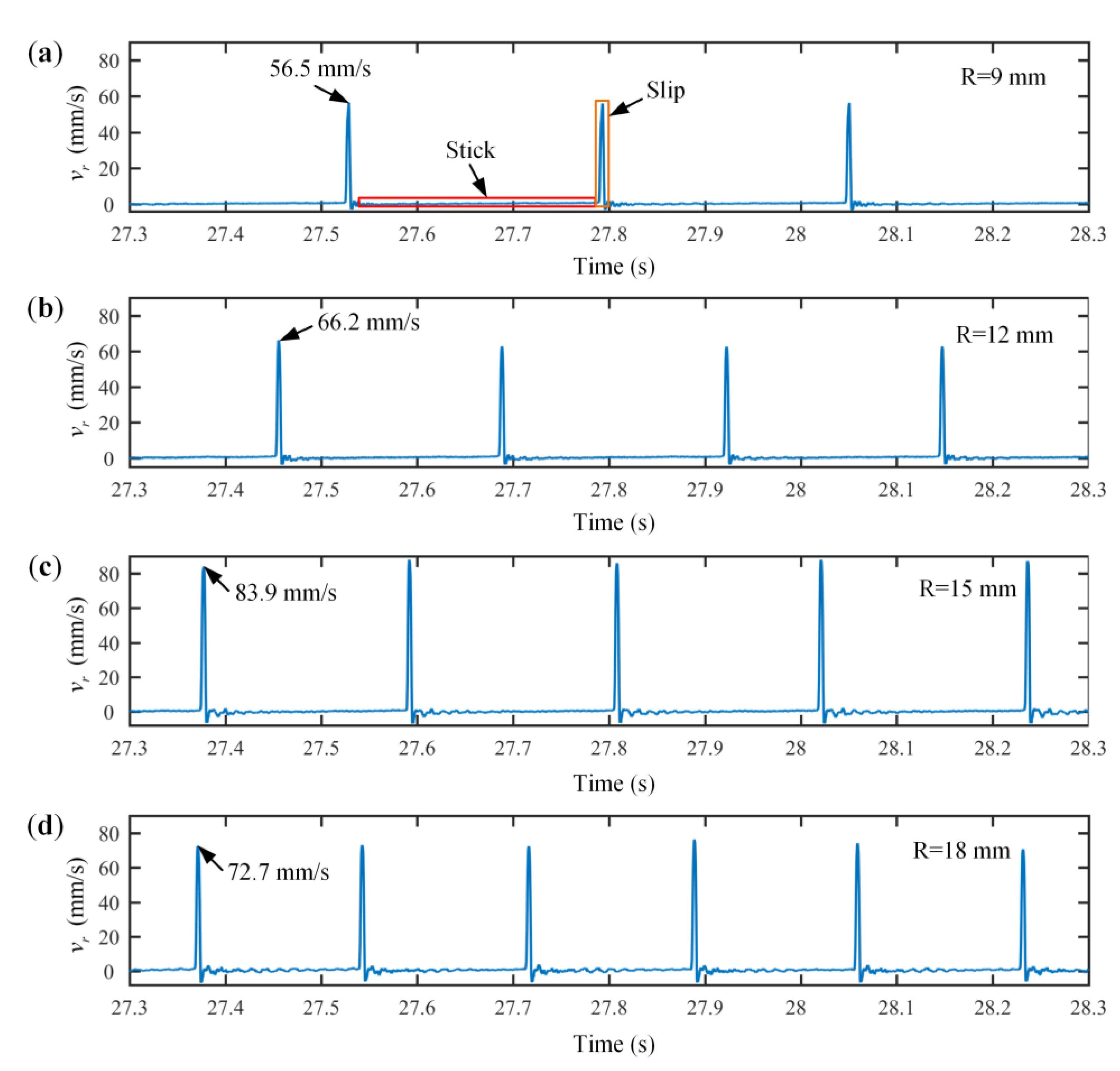
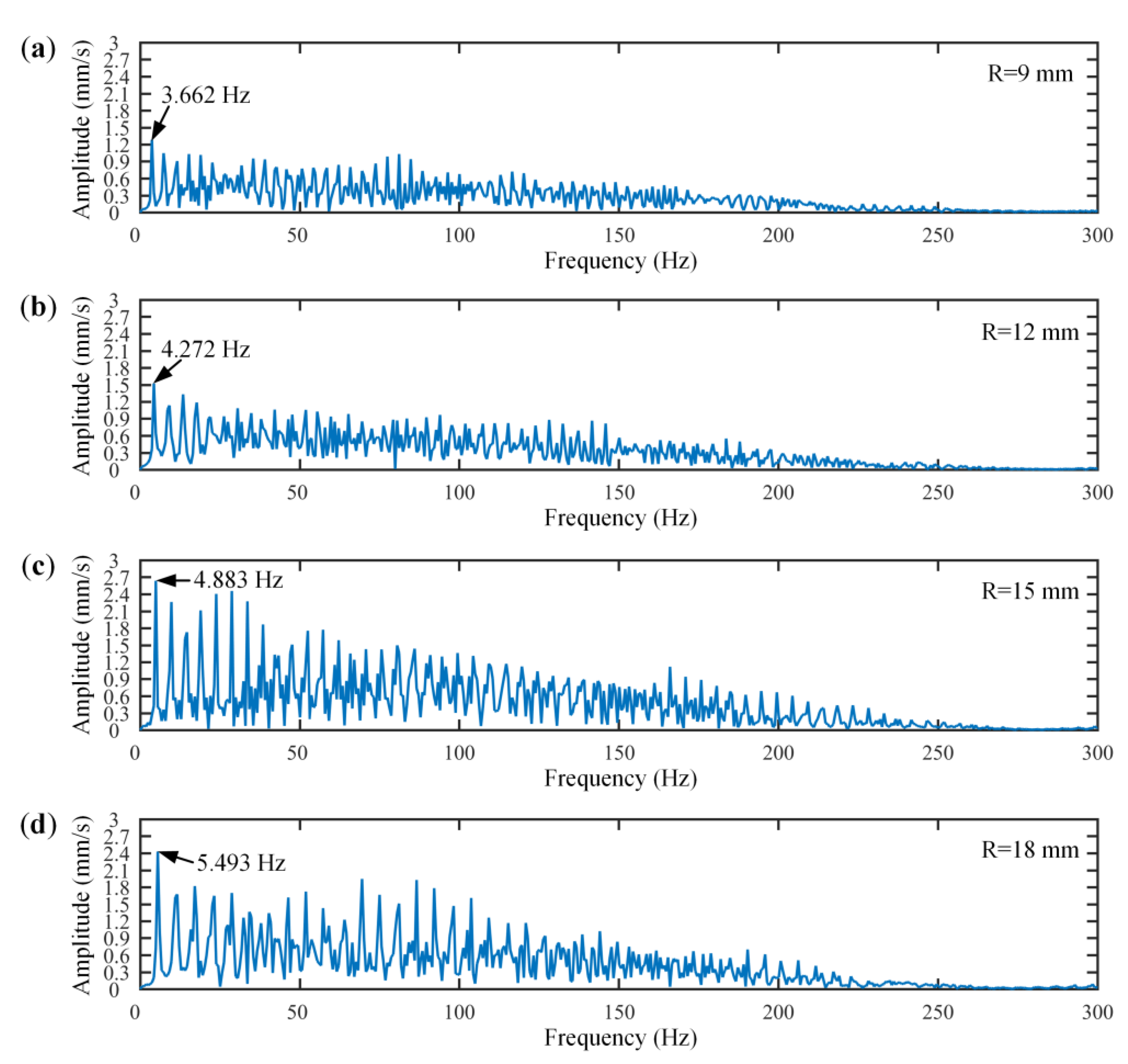
- The disc–block friction systems with four different friction radii all experienced stick–slip vibration. As the friction radius increased, the period of stick–slip vibration decreased and the amplitude of stick–slip vibration first increased and then decreased. The amplitude was lowest when the friction radius was 9 mm. The fundamental frequency increased and the corresponding amplitude increased and then decreased, which was consistent with the time-domain response results.
- (2).
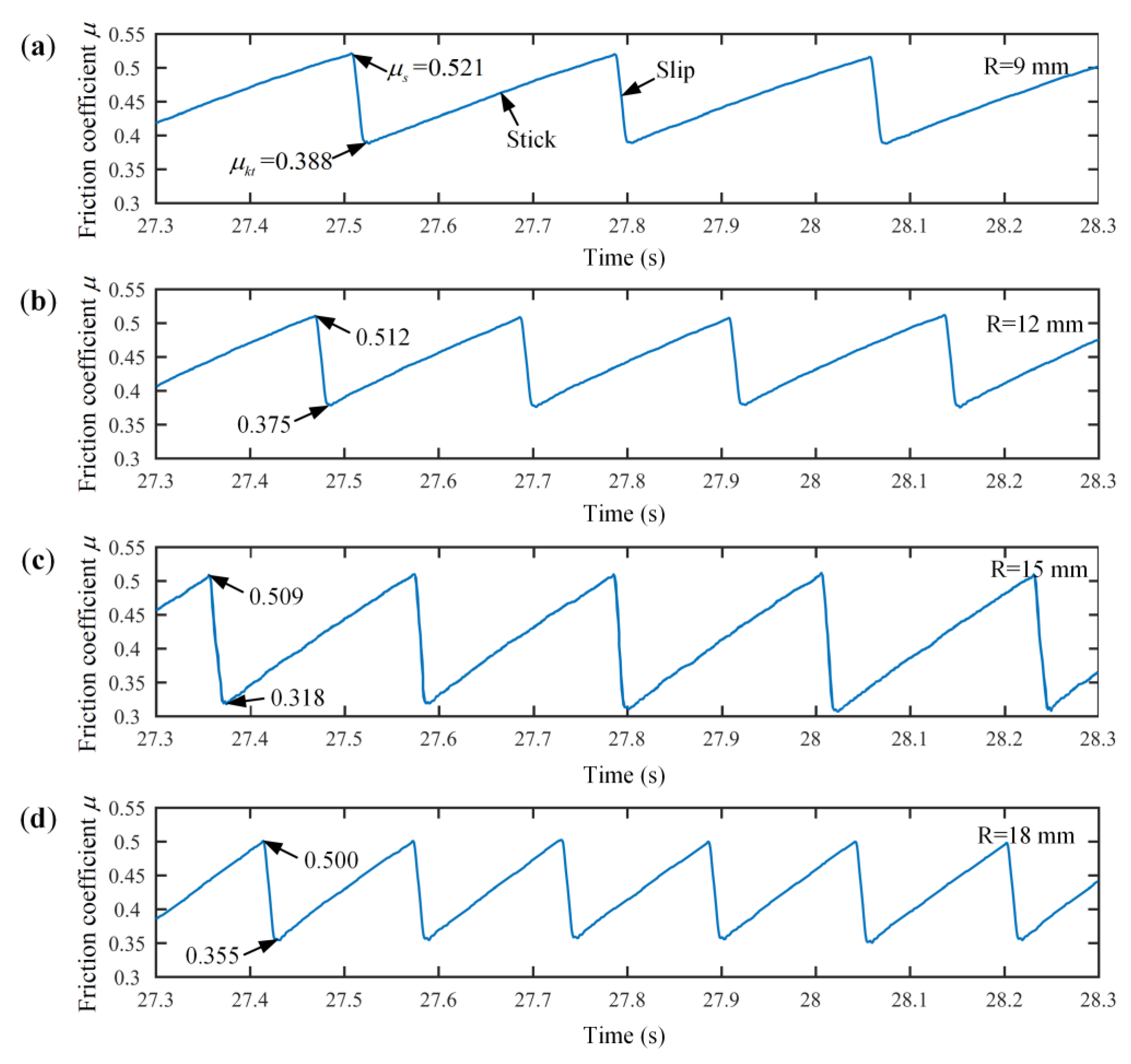
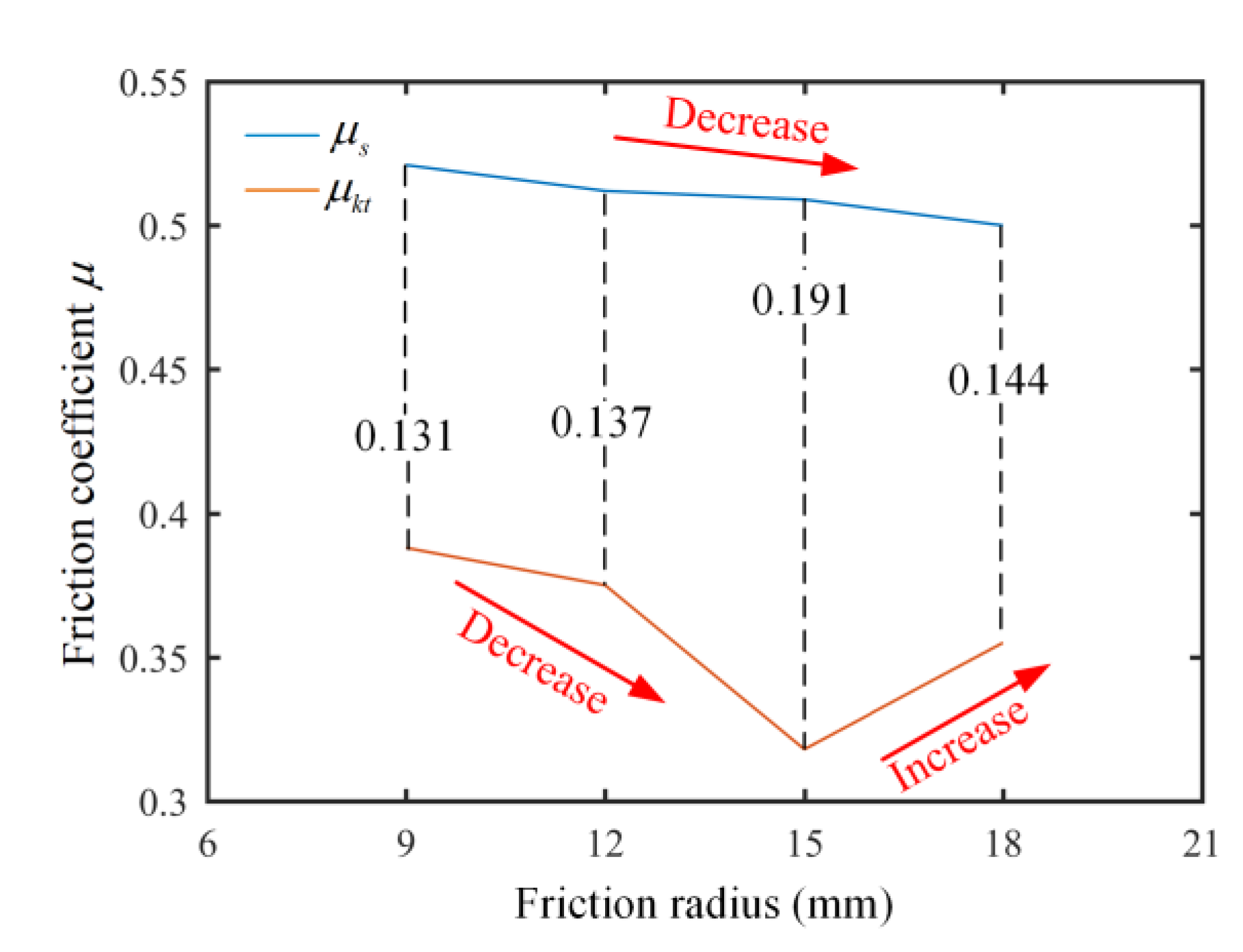
- With the increase in the friction radius, the static friction coefficient decreased gradually and the dynamic friction coefficient decreased first and then increased. Furthermore, the variation trend of the difference between the dynamic and static friction coefficients was consistent with that of the stick–slip vibration amplitude.
- (3).
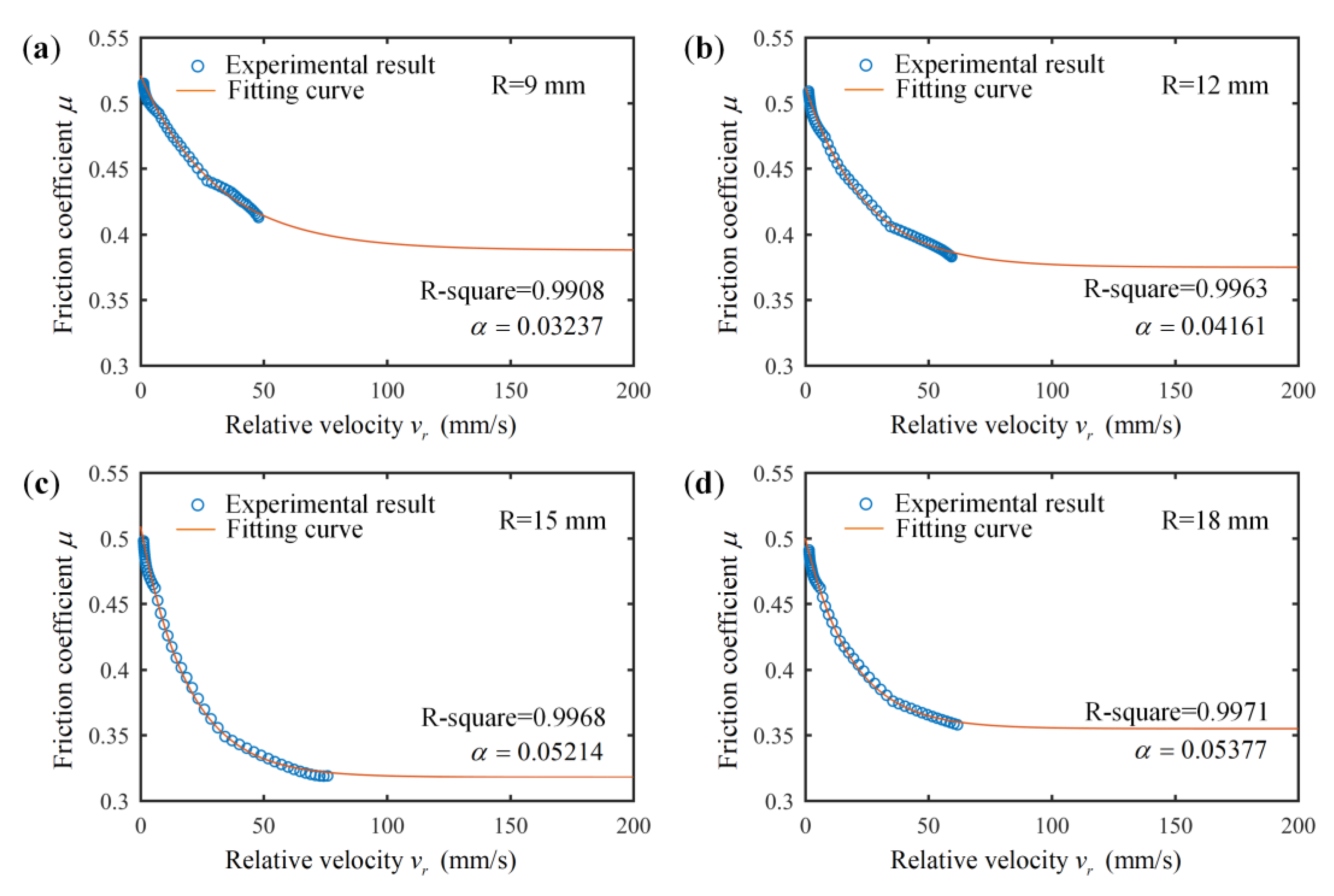
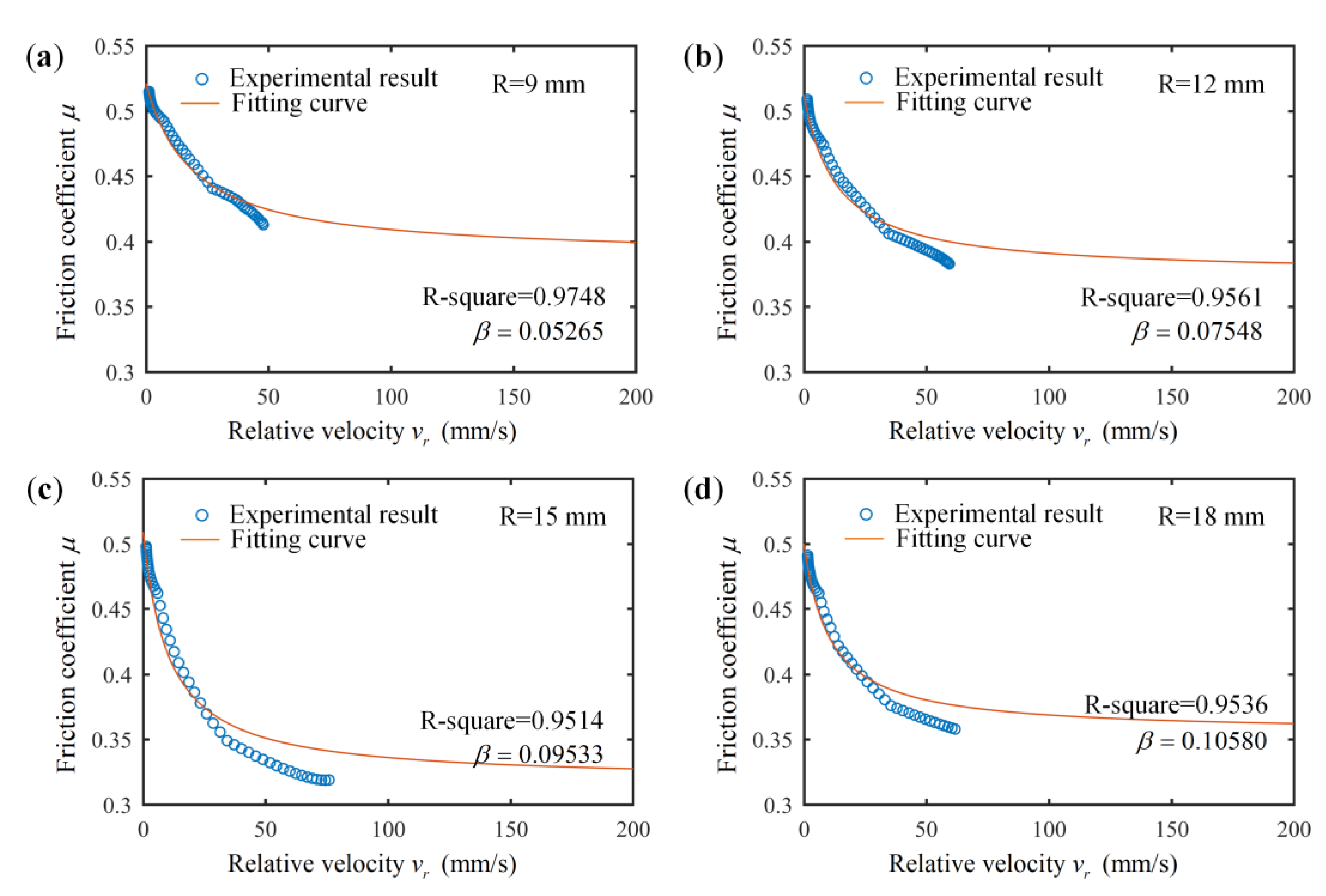
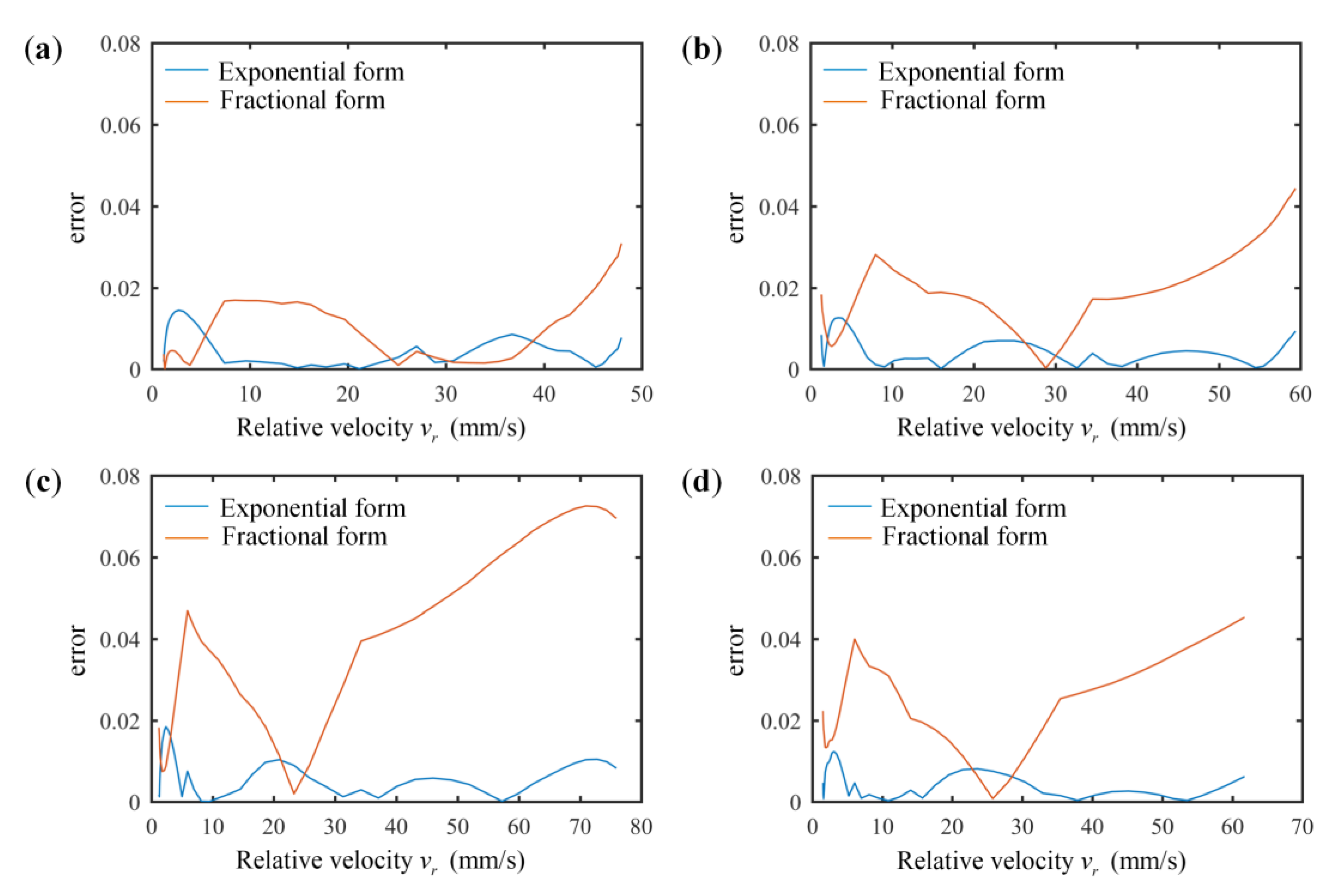
- Both the exponential and fractional Stribeck friction models could effectively reflect the negative slope characteristics between the disc–block relative velocity and the friction coefficient, and the decay factors in the exponential and fractional forms increased with the increase in the friction radius. Moreover, the identified Stribeck model in its exponential form was more coincident with the stick–slip characteristics of the disc–block friction system than the model in its fractional form.
- (4).
- The severity of stick–slip vibration varied with the friction radius. In the real high-speed train braking system, to suppress or reduce its vibration, adjusting the friction radius is an option.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ghorbel, A.; Zghal, B.; Abdennadher, M.; Walha, L.; Haddar, M. Investigation of friction-induced vibration in a disk brake model, including mode-coupling and gyroscopic mechanisms. Proc. Inst. Mech. Eng. Part D-J. Automob. Eng. 2020, 243, 887–896. [Google Scholar] [CrossRef]
- Butlin, T.; Woodhouse, J. Sensitivity of friction-induced vibration in idealized systems. J. Sound Vib. 2009, 319, 182–198. [Google Scholar]
- Wang, Q.; Wang, Z.W.; Mo, J.L.; Zhang, L.; Du, L.Q.; Gou, Q.B. Coupled dynamic behaviours of the brake system considering wheel–rail interactions. Int. J. Rail 2021, 10, 749–771. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Z.W.; Wang, Q.; Mo, J.L.; Feng, J.; Wang, K.Y. The effect of wheel polygonal wear on temperature and vibration characteristics of a high-speed train braking system. Mech. Syst. Signal Process. 2023, 186, 109864. [Google Scholar] [CrossRef]
- Wang, Z.W.; Mei, G.M.; Xiong, Q.; Yin, Z.H.; Zhang, W.H. Motor car–track spatial coupled dynamics model of a high-speed train with traction transmission systems. Mech. Mach. Theory 2019, 137, 386–403. [Google Scholar] [CrossRef]
- Zeng, L.B.; Zhao, J.L.; Meng, Y.S. Vibrational fatigue failure prediction of a brake caliper used for railway vehicles based on frequency domain method. J. Phys. Conf. Ser. 2021, 1948, 012091. [Google Scholar] [CrossRef]
- Yuan, Q.; Tang, P.; Li, S.S. Topology optimization design of brake structure to reduce friction-induced vibration and noise. Mech. Sci. Technol. Aerosp. Eng. 2021, 40, 1391–1396. [Google Scholar]
- Gao, H.; Dai, H.Y. Disk brake element chatter analysis and strength evaluation for railway vehicle system. Mater. Prod. Technol. 2008, 44–46, 901–904. [Google Scholar] [CrossRef]
- Li, F.Z.; Tong, S.G. The Vibration and modal analysis of the disc brake. Adv. Mater. Res. 2013, 774–776, 78–81. [Google Scholar] [CrossRef]
- Moon. A study for failure examples of brake judder with abnormal vibration of disc brake. J. Korean Inst. Gas 2016, 20, 40–45. [Google Scholar] [CrossRef] [Green Version]
- Xiao, J.K.; Xiao, S.X.; Chen, J.; Zhang, C. Wear mechanism of Cu-based brake pad for high-speed train braking at speed of 380 km/h. Tribol. Int. 2020, 150, 106357. [Google Scholar] [CrossRef]
- Modanloo, A.; Talaee, M.R. Analytical thermal analysis of advanced disk brake in high speed vehicles. Mech. Adv. Mater. Struct. 2020, 27, 209–217. [Google Scholar] [CrossRef]
- Yang, G.; Yang, Y. Investigation on the thermal fatigue life evaluation method of railway brake disc with new material. Teh. Vjesn. Tech. Gaz. 2018, 25, 1095–1102. [Google Scholar]
- Zhou, Q.Z.; Wang, D.S.; Gao, S.Y.; Liu, B. Research advances of mechanisms and control methods of friction-induced braking noise. Noise Vib. Control 2017, 37, 1–5+218. [Google Scholar]
- Wang, A.Y.; Mo, J.L.; Wang, X.C.; Zhu, M.H.; Zhou, Z.R. Effect of surface roughness on friction-induced noise: Exploring the generation of squeal at sliding friction interface. Wear 2018, 402–403, 80–90. [Google Scholar] [CrossRef]
- Wang, D.W.; Mo, J.L.; Zhu, Z.Y.; Ouyang, H.; Zhu, M.H.; Zhou, Z.R. Debris trapping and space-varying contact via surface texturing for enhanced noise performance. Wear 2018, 396–397, 86–97. [Google Scholar] [CrossRef]
- Charroyer, L.; Chiello, O.; Sinou, J.J. Parametric study of the mode coupling instability for a simple system with planar or rectilinear friction. J. Sound Vib. 2016, 384, 94–112. [Google Scholar] [CrossRef] [Green Version]
- Tang, B.; Mo, J.L.; Xu, J.W.; Wu, Y.K.; Zhu, M.H.; Zhou, Z.R. Effect of perforated structure of friction block on the wear, thermal distribution and noise characteristics of railway brake systems. Wear 2019, 426–427, 1176–1186. [Google Scholar] [CrossRef]
- Xiang, Z.Y.; Chen, W.; Mo, J.L.; Liu, Q.A.; Fan, Z.Y.; Zhou, Z.R. The effects of the friction block shape on the tribological and dynamical behaviors of high-speed train brakes. Int. J. Mech. Sci. 2021, 194, 106184. [Google Scholar] [CrossRef]
- Tang, B.; Mo, J.L.; Xu, J.W.; Wu, Y.K.; Zhu, M.H.; Zhou, Z.R. Effect of the friction block shape of railway brakes on the vibration and noise under dry and wet conditions. Tribol. Trans. 2019, 62, 262–273. [Google Scholar] [CrossRef]
- Quan, X.; Mo, J.L.; Huang, B.; Tang, B.; Ouyang, H.J.; Zhou, Z.R. Influence of the Friction Block Shape and Installation Angle of High-Speed Train Brakes on Brake Noise. J. Tribol. 2020, 142, 031701. [Google Scholar] [CrossRef]
- Wu, Y.K.; Xu, J.W.; Wang, X.C.; Chen, W.; Lu, C.; Mo, J.L. The effect of damping components on the interfacial dynamics and tribological behavior of high-speed train brakes. Appl. Acoust. 2021, 178, 107962. [Google Scholar] [CrossRef]
- EL-Tayeb, N.S.M.; Liew, K.W. On the dry and wet sliding performance of potentially new frictional brake pad materials for automotive industry. Wear 2009, 266, 275–287. [Google Scholar] [CrossRef]
- Li, D.; Zheng, Z.C.; Gao, Y.; Shan, P.; Luo, W.; Liu, F.L.; Han, D.Y.; Zhang, Y.F.; Lv, Q.Y. Finite element analysis on the influence of the change of characteristic parameters of brake Pad on structural modal. IOP Conf. Ser. Earth Environ. Sci. 2020, 446, 052077. [Google Scholar] [CrossRef]
- Abdo, J.; Nouby, M.; Mathivanan, D.; Srinivasan, K. Reducing disc brake squeal through FEM approach and experimental design technique. Veh. Noise Vib. 2010, 6, 230–246. [Google Scholar] [CrossRef]
- Wei, D.G.; Wang, W.J.; Wang, B.; Wang, W.; Li, S.H.; Wu, D.; Jiang, P. Bifurcation and chaotic behaviors of vehicle brake system under low speed braking condition. J. Vib. Eng. Technol. 2021, 9, 2107–2120. [Google Scholar] [CrossRef]
- Stoica, N.A.; Petrescu, A.M.; Tudor, A.; Predescu, A. Tribological properties of the disc brake friction couple materials in the range of small and very small speeds. 13th Int. Conf. Tribol. (Rotrib’16) 2017, 174, 012019. [Google Scholar] [CrossRef] [Green Version]
- PASCAL, M. New events in stick-slip oscillators behaviour. J. Appl. Math. Mech. 2011, 75, 283–288. [Google Scholar] [CrossRef] [Green Version]
- Kato, S.; Yamaguchi, K.; Matsubayashi, T. Stick-Slip Motion of Machine Tool Slideway. J. Manuf. Sci. Eng. 1974, 96, 557–566. [Google Scholar] [CrossRef]
- Wu, W.X.; Brickle, B.V.; Smith, J.H.; Luo, R.K. An investigation into stick-slip vibrations on vehicle/track systems. Veh. Syst. Dyn. 1998, 30, 229–236. [Google Scholar] [CrossRef]
- Huang, B.; Wu, Y.; Wang, R.; Wang, X.; Ouyang, H.; Mo, J.L. Study of parameters of Stribeck model based on stick-slip oscillation experimental test. J. Anhui Polytech. Univ. 2020, 35, 1–8+100. [Google Scholar]
- Abdo, J.; Abouelsoud, A.A. Analytical approach to estimate amplitude of stick-slip oscillations. J. Theor. Appl. Mech. 2011, 49, 971–986. [Google Scholar]
- Wang, Z.W.; Zhang, Y. Research on nonlinear stick-slip motion behavior of automotive disc brake system via ABAQU. Mod. Manuf. Eng. 2020, 10, 62–69. [Google Scholar]
- Wang, X.C.; Wang, R.L.; Huang, B.; Mo, J.L. A study of effect of various normal force loading forms on frictional stick-slip vibration. J. Dyn. Monit. Diagn. 2021, 1, 46–55. [Google Scholar] [CrossRef]
- Meng, D.J.; Zhang, L.J.; Xu, X.T.; Sardahi, Y.; Chen, G.S. Sensing and Quantifying a New Mechanism for Vehicle Brake Creep Groan. Shock. Vib. 2019, 2019, 1843205. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, Z.W.; Mo, J.L.; Zhang, L. Nonlinear behaviors of the disc brake system under the effect of wheel-rail adhesion. Tribol. Int. 2022, 165, 107263. [Google Scholar] [CrossRef]
- Li, C.B.; Pavelescu, D. The friction-speed relation and its influence on the critical velocity of stick-slip motion. Wear 1982, 82, 277–289. [Google Scholar]
- Van De Vrande, B.L.; Van Campen, D.H.; De Kraker, A. Approximate analysis of dry-friction-induced stick-slip vibrations by a smoothing procedure. Nonlinear Dyn. 1999, 19, 157–169. [Google Scholar] [CrossRef]
- Wei, D.G.; Ruan, J.Y.; Zhu, W.W.; Kang, Z.H. Properties of stability, bifurcation, and chaos of the tangential motion disk brake. J. Sound Vib. 2016, 375, 353–365. [Google Scholar] [CrossRef]
- Bouc, R. Forced Vibration of Mechanical System with Hysteresis. In Proceedings of the Fourth Conference on Nonlinear Oscillations, Prague, Czech Republic, 5–9 September 1967; p. 315. [Google Scholar]
- Wen, Y.K. Method of fandom vibration of hysteretic systems. ASCE J. Eng. Mech. Div. 1976, 102, 1069–1089. [Google Scholar]
- Zhu, W.W. Dynamics Analysis of Stability, Bifurcation, and Chaos of Vehicle Brake Groan at Low Speeds. Master’s Thesis, Hefei University of Technology, Hefei, China, 2016. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Fe | Si | Mn | C | Ni | Cr | Mo |
|---|---|---|---|---|---|---|---|
| Content (wt%) | Balance | 0.25 | 0.75 | 0.31 | 1.8 | 1.1 | 0.5 |
| Element | Cu | Fe | Graphite | MoS2 | FeCr | SiC | Others |
|---|---|---|---|---|---|---|---|
| Content (wt%) | 45–50 | 13–15 | 18–20 | 4–6 | 6–8 | 2–4 | 3–5 |
| Sample | Density (g/cm3) | Young’s Modulus (GPa) | Poisson’s Ration |
|---|---|---|---|
| Disc | 7.8 | 178 | 0.3 |
| Block | 4.7 | 6.5 | 0.28 |
| Friction Radius | Static Friction Coefficient | Dynamic Friction Coefficient | Exponential Decay Factor | Fractional Decay Factor |
|---|---|---|---|---|
| 9 mm | 0.521 | 0.388 | 0.03237 | 0.05265 |
| 12 mm | 0.512 | 0.375 | 0.04161 | 0.07548 |
| 15 mm | 0.509 | 0.318 | 0.05214 | 0.09533 |
| 18 mm | 0.500 | 0.355 | 0.05377 | 0.10580 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, C.; Wang, Q.; Wang, Z.; Mo, J.; Zhu, S.; Jin, W. Stick–Slip Characteristic Analysis of High-Speed Train Brake Systems: A Disc–Block Friction System with Different Friction Radii. Vehicles 2023, 5, 41-54. https://doi.org/10.3390/vehicles5010003
Lu C, Wang Q, Wang Z, Mo J, Zhu S, Jin W. Stick–Slip Characteristic Analysis of High-Speed Train Brake Systems: A Disc–Block Friction System with Different Friction Radii. Vehicles. 2023; 5(1):41-54. https://doi.org/10.3390/vehicles5010003
Chicago/Turabian StyleLu, Changlin, Quan Wang, Zhiwei Wang, Jiliang Mo, Song Zhu, and Wenwei Jin. 2023. "Stick–Slip Characteristic Analysis of High-Speed Train Brake Systems: A Disc–Block Friction System with Different Friction Radii" Vehicles 5, no. 1: 41-54. https://doi.org/10.3390/vehicles5010003