
Development Challenges of Fruit-Harvesting Robotic Arms: A Critical Review

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
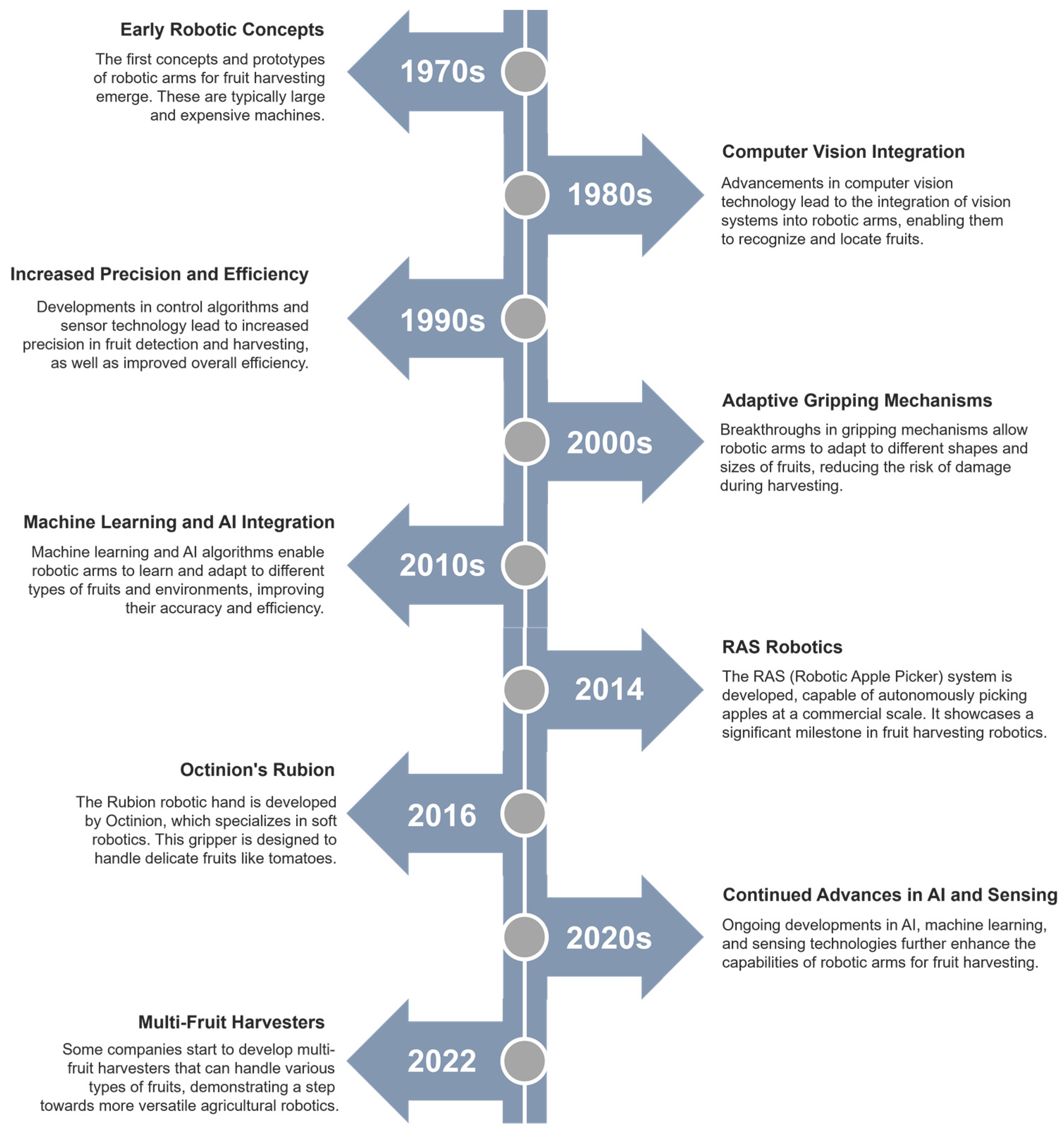
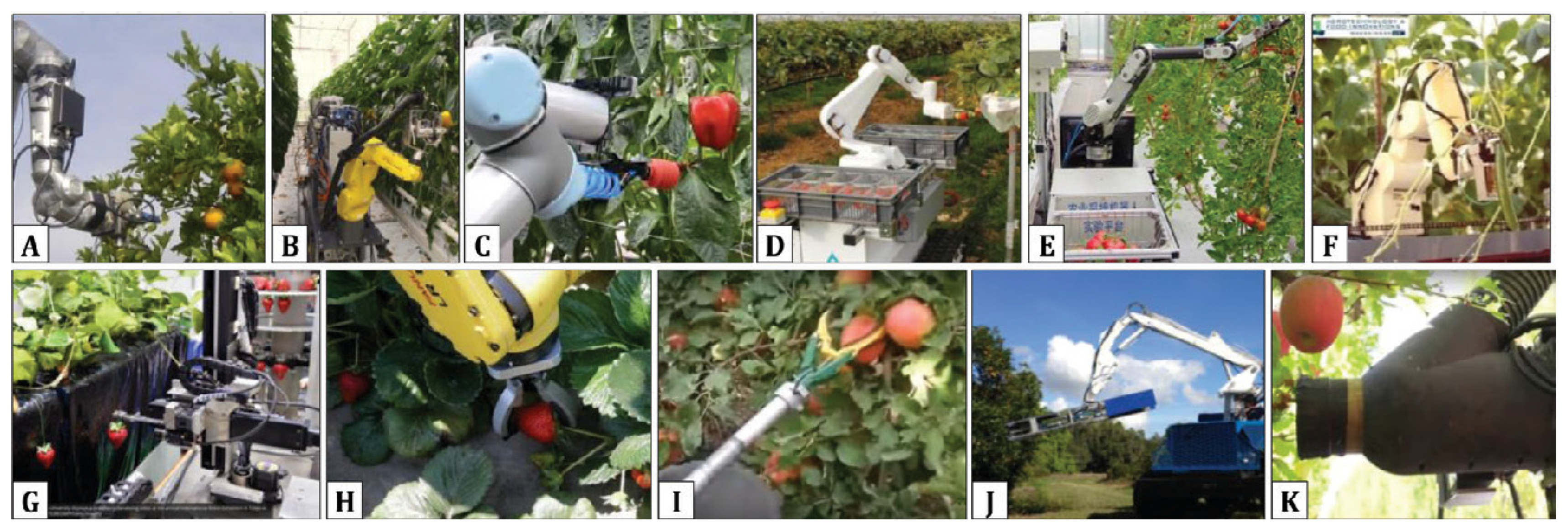
2. Recent Developments
3. System Requirements
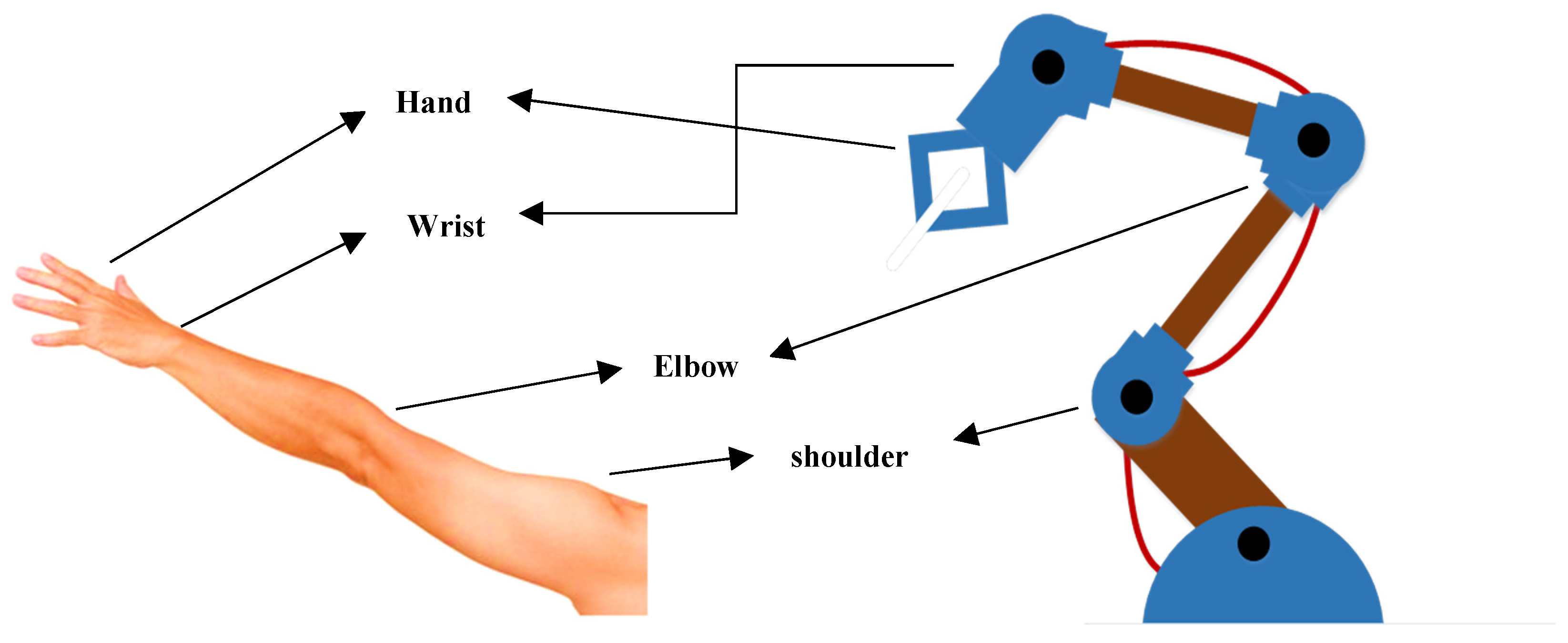
3.1. Manipulator
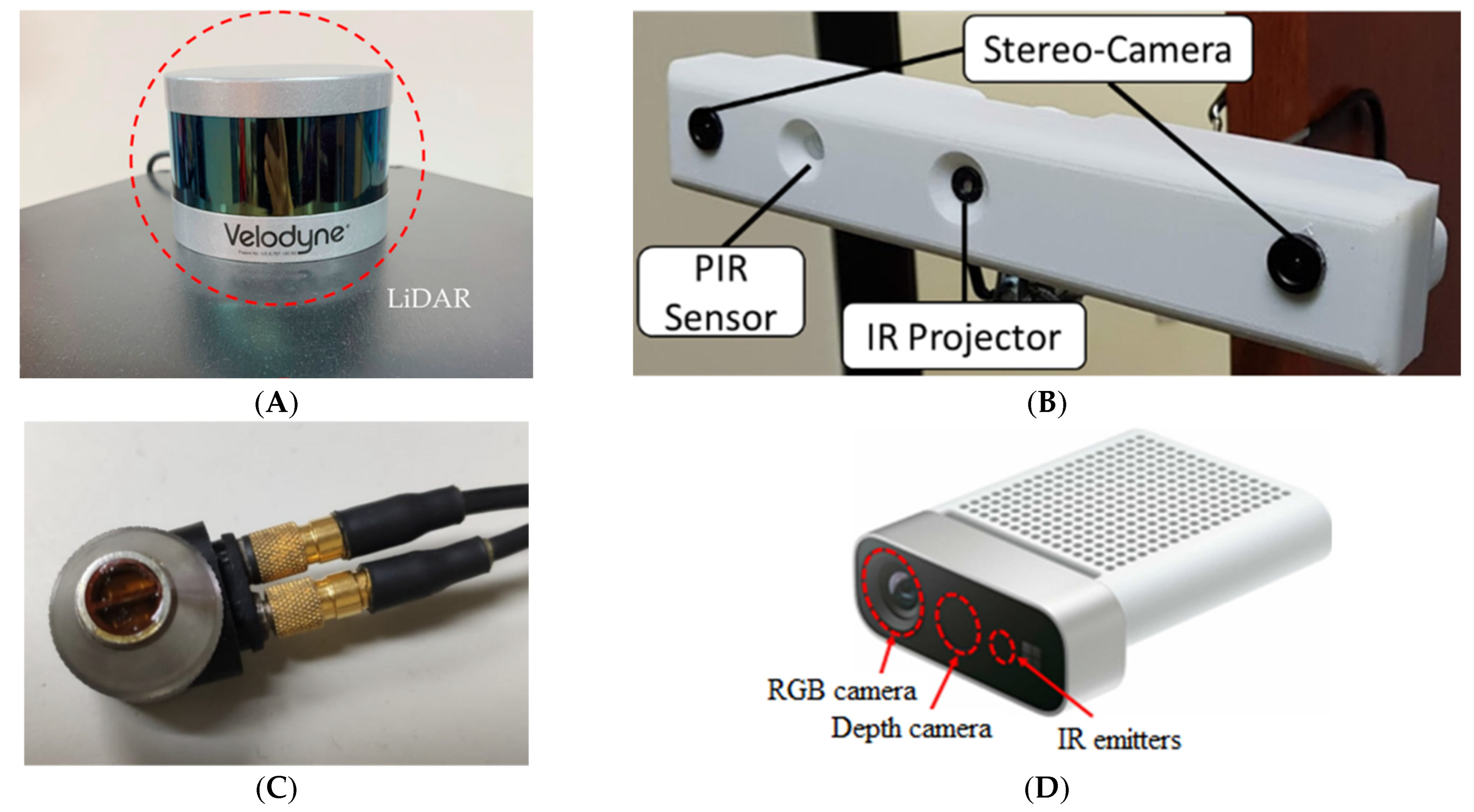
3.2. Vision System
3.3. End-Effector
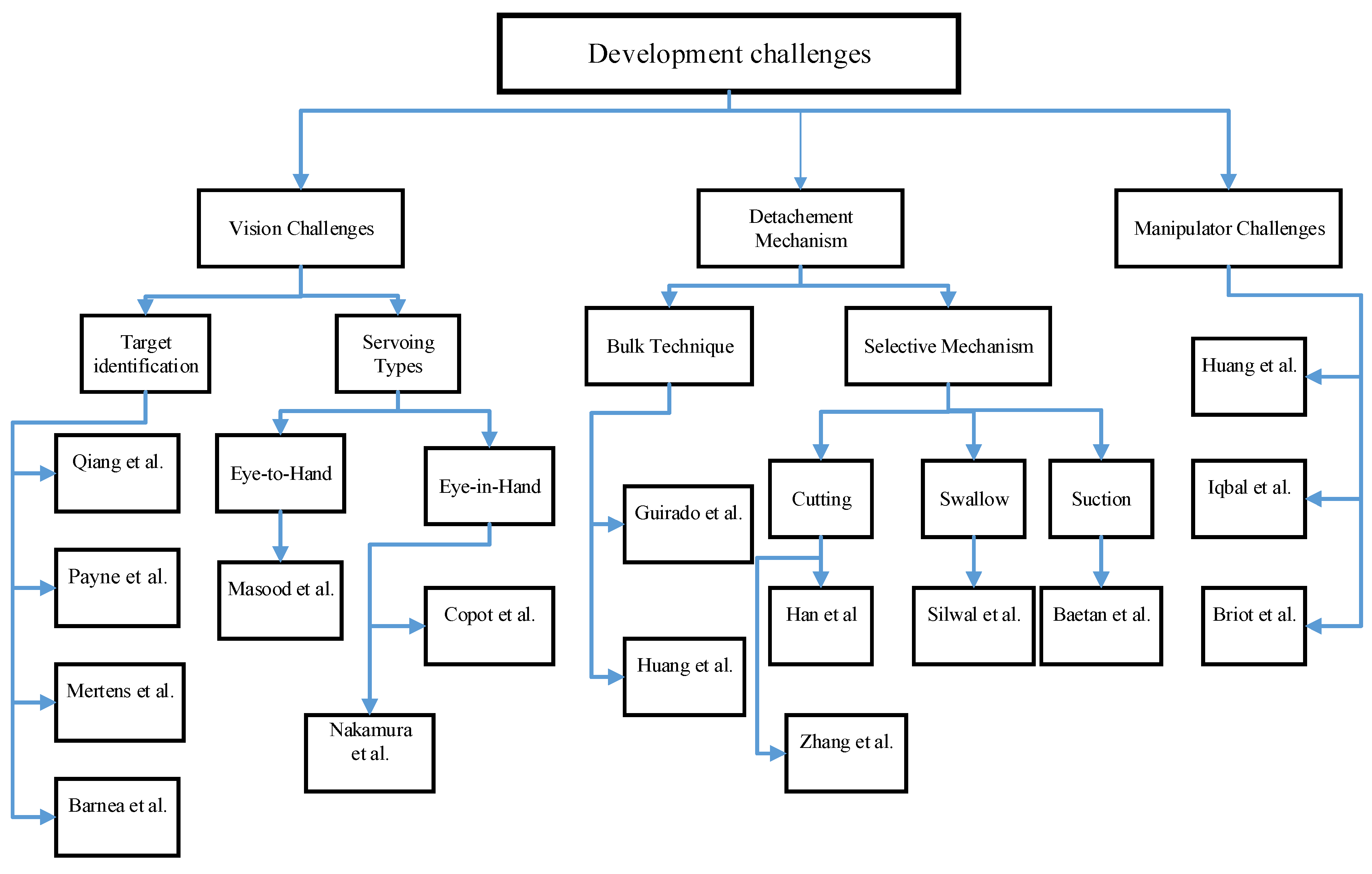
4. Development Challenges
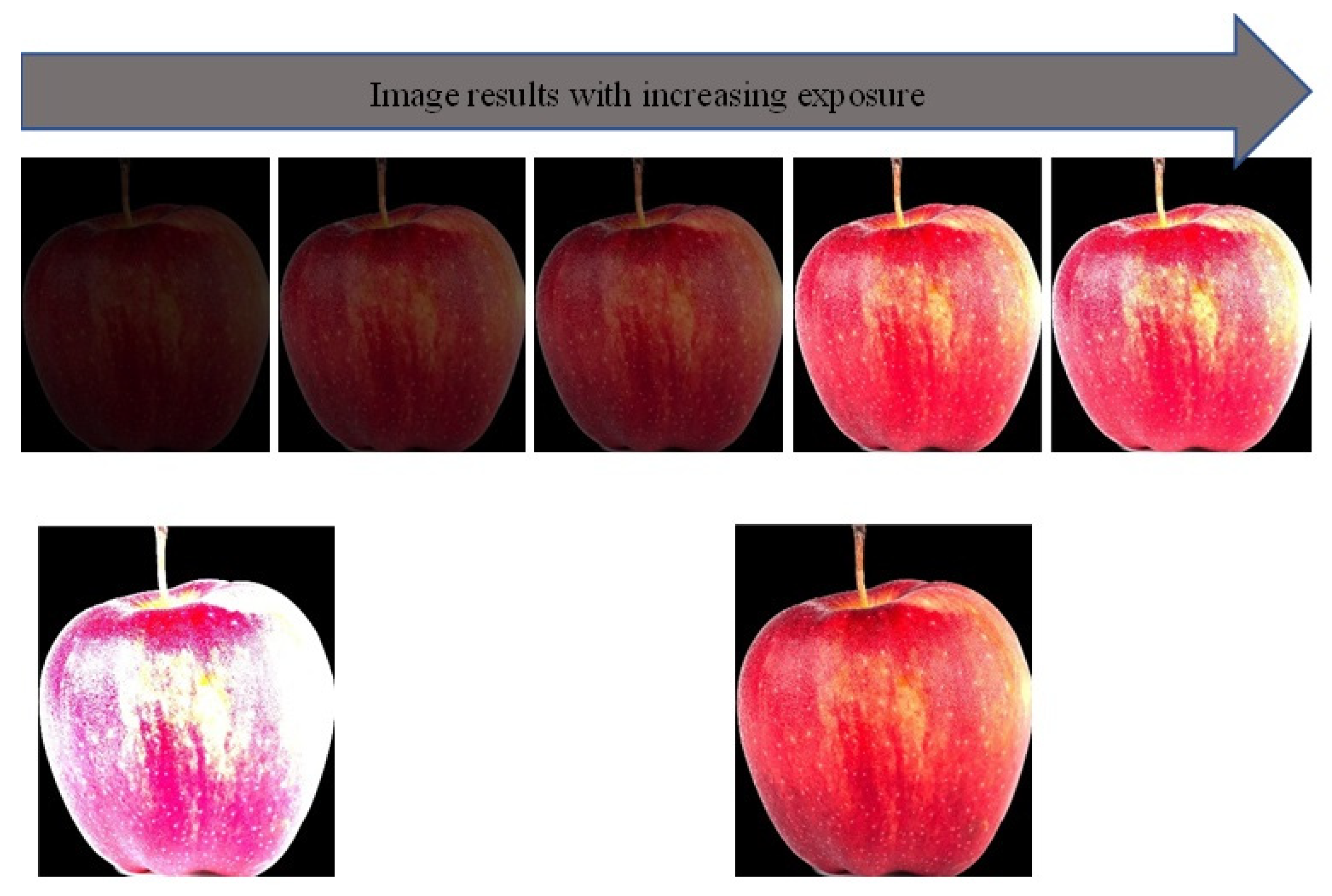
4.1. Vision Challenges
4.2. End-Effector Challenges
4.3. Manipulator Challenges
5. Conclusions
6. Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kanade, P.; Alva, P.; Kanade, S.; Ghatwal, S. Automated Robot ARM using Ultrasonic Sensor in Assembly Line. Int. Res. J. Eng. Technol. 2020, 7, 615–620. [Google Scholar]
- Racu, C.M.; Doroftei, I.; Plesu, G.; Doroftei, I.A. Simulation of an ankle rehabilitation system based on scotch-yoke mechanism. IOP Conf. Ser. Mater. Sci. Eng. 2016, 147, 012084. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Santos, C.H.; Pekkeriet, E. Agricultural robotics for field operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef]
- Ghute, M.S. Design of Military Surveillance Robot. In Proceedings of the 2018 First International Conference on Secure Cyber Computing and Communication (ICSCCC), Jalandhar, India, 15–17 December 2018; pp. 270–272. [Google Scholar] [CrossRef]
- Kumar, P.; Ashok, G. Design and fabrication of smart seed sowing robot. Mater. Today Proc. 2020, 39, 354–358. [Google Scholar] [CrossRef]
- Blasco, J.; Aleixos, N.; Roger, J.M.; Rabatel, G.; Moltó, E. Robotic weed control using machine vision. Biosyst. Eng. 2002, 83, 149–157. [Google Scholar] [CrossRef]
- Wang, Y.; Xie, L.; Wang, H.; Zeng, W.; Ding, Y.; Hu, T.; Zheng, T.; Liao, H.; Hu, J. Intelligent spraying robot for building walls with mobility and perception. Autom. Constr. 2022, 139, 104270. [Google Scholar] [CrossRef]
- Chaudhury, A.; Ward, C.; Talasaz, A.; Ivanov, A.G.; Huner, N.P.; Grodzinski, B.; Patel, R.V.; Barron, J.L. Computer Vision Based Autonomous Robotic System for 3D Plant Growth Measurement. In Proceedings of the 2015 12th Conference on Computer and Robot Vision, Halifax, NS, Canada, 3–5 June 2015; pp. 290–296. [Google Scholar] [CrossRef]
- Chen, G.; Muriki, H.; Sharkey, A.; Pradalier, C.; Chen, Y.; Dellaert, F. A Hybrid Cable-Driven Robot for Non-Destructive Leafy Plant Monitoring and Mass Estimation using Structure from Motion. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023. [Google Scholar]
- Concepcion, R., II; Lauguico, S.; Valenzuela, I.; Bandala, A.; Dadios, E. Denavit-Hartenberg-based Analytic Kinematics and Modeling of 6R Degrees of Freedom Robotic Arm for Smart Farming. J. Comput. Innov. Eng. Appl. 2021, 5, 1–7. [Google Scholar]
- Lauguico, S.C.; Concepcion, R.S.; MacAsaet, D.D.; Alejandrino, J.D.; Bandala, A.A.; Dadios, E.P. Implementation of Inverse Kinematics for Crop-Harvesting Robotic Arm in Vertical Farming. In Proceedings of the 2019 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Bangkok, Thailand, 18–20 November 2019; pp. 298–303. [Google Scholar] [CrossRef]
- Peters, C.J.; Bills, N.L.; Wilkins, J.L.; Fick, G.W. Foodshed analysis and its relevance to sustainability. Renew. Agric. Food Syst. 2009, 24, 1–7. [Google Scholar] [CrossRef]
- Davis, K.F.; Gephart, J.A.; Emery, K.A.; Leach, A.M.; Galloway, J.N.; D’Odorico, P. Meeting future food demand with current agricultural resources. Glob. Environ. Change 2016, 39, 125–132. [Google Scholar] [CrossRef]
- Chand, R.; Srivastava, S.K. Changes in the rural labour market and their implications for agriculture. Econ. Polit. Wkly. 2014, 49, 47–54. [Google Scholar]
- Mutekwa, V.T. Climate change impacts and adaptation in the agricultural sector: The case of smallholder farmers in Zimbabwe. J. Sustain. Dev. Afr. 2009, 11, 237–256. [Google Scholar]
- Siche, R. What is the impact of COVID-19 disease on agriculture? Sci. Agropecu. 2020, 11, 3–6. [Google Scholar] [CrossRef]
- Martini, M.; Gazzaniga, V.; Bragazzi, N.L.; Barberis, I. The Spanish Influenza Pandemic: A lesson from history 100 years after 1918. J. Prev. Med. Hyg. 2019, 60, E64–E67. [Google Scholar] [CrossRef] [PubMed]
- Corley, A.; Hammond, N.E.; Fraser, J.F. The experiences of health care workers employed in an Australian intensive care unit during the H1N1 Influenza pandemic of 2009: A phenomenological study. Int. J. Nurs. Stud. 2010, 47, 577–585. [Google Scholar] [CrossRef]
- Piot, P.; Bartos, M.; Ghys, P.D.; Walker, N.; Schwartlander, B. The global impact of HIV/AIDS. Nature 2001, 410, 968–973. [Google Scholar] [CrossRef]
- Chandler, A. Fruit and Veg Risk Rotting in Australia on Second COVID-19 Wave. Available online: https://www.bnnbloomberg.ca/fruit-and-veg-risk-rotting-in-australia-on-second-COVID-19-wave-1.1469292 (accessed on 22 October 2023).
- Jain, R.; Meena, M.L.; Dangayach, G.S.; Bhardwaj, A.K. Risk factors for musculoskeletal disorders in manual harvesting farmers of Rajasthan. Ind. Health 2018, 56, 241–248. [Google Scholar] [CrossRef]
- Singerman, A.; Burani-Arouca, M.; Futch, S.H. Harvesting Charges for Florida Citrus: Picking, Roadsiding, and Hauling, 2015/16. EDIS 2017, 2017, 1–5. [Google Scholar] [CrossRef]
- Ampatzidis, Y.G.; Vougioukas, S.G.; Whiting, M.D.; Zhang, Q. Applying the machine repair model to improve efficiency of harvesting fruit. Biosyst. Eng. 2014, 120, 25–33. [Google Scholar] [CrossRef]
- Leu, A.; Razavi, M.; Langst, L.; Schenck, C.; Gr, A. Robotic Green Asparagus Selective Harvesting. Mechatronics 2017, 22, 2401–2410. [Google Scholar] [CrossRef]
- ARaffo, A.; Baiamonte, I.; Nardo, N.; Nicoli, S.; Moneta, E.; Peparaio, M.; Sinesio, F.; Paoletti, F. Impact of early harvesting and two cold storage technologies on eating quality of red ripe tomatoes. Eur. Food Res. Technol. 2018, 244, 805–818. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Ceres, R.; Pons, J.L.; Jiménez, A.R.; Martín, J.M.; Calderón, L. Design and implementation of an aided fruit-harvesting robot (Agribot). Ind. Rob. 1998, 25, 337–346. [Google Scholar] [CrossRef]
- Kondo, N.; Monta, M.; Fujiura, T. Fruit harvesting robots in Japan. Adv. Space Res. 1996, 18, 181–184. [Google Scholar] [CrossRef]
- Edan, Y. Design of an autonomous agricultural robot. Appl. Intell. 1995, 51, 41–50. [Google Scholar] [CrossRef]
- Plebe, A.; Grasso, G. Localization of spherical fruits for robotic harvesting. Mach. Vis. Appl. 2001, 13, 70–79. [Google Scholar] [CrossRef]
- Yoshikawa, T. Manipulability and redundancy control of robotic mechanisms. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 1004–1009. [Google Scholar] [CrossRef]
- Allotta, B.; Buttazzo, G.; Dario, P.; Quaglia, F.; Levi, P. A force/torque sensor-based technique for robot harvesting of fruits and vegetables. In Proceedings of the IEEE International Workshop on Intelligent Robots and Systems, Towards a New Frontier of Applications, Ibaraki, Japan, 3–6 July 1990; pp. 231–235. [Google Scholar] [CrossRef]
- Friedrich, W.E.; Lim, P.K. Smart End-effector Sensing for Variable Object Handling. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 1998; pp. 447–450. [Google Scholar] [CrossRef]
- Jia, B.; Zhu, A.; Yang, S.X.; Mittal, G.S. Integrated gripper and cutter in a mobile robotic system for harvesting greenhouse products. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1778–1783. [Google Scholar] [CrossRef]
- Baeten, J.; Donné, K.; Boedrij, S.; Beckers, W.; Claesen, E. Autonomous fruit picking machine: A robotic apple harvester. In Field and Service Robotics; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 42, pp. 531–539. [Google Scholar] [CrossRef]
- Hayashi, S.; Shigematsu, K.; Yamamoto, S.; Kobayashi, K.; Kohno, Y.; Kamata, J.; Kurita, M. Evaluation of a strawberry-harvesting robot in a field test. Biosyst. Eng. 2010, 105, 160–171. [Google Scholar] [CrossRef]
- Paradkar, V.; Raheman, H.; Rahul, K. Development of a metering mechanism with serial robotic arm for handling paper pot seedlings in a vegetable transplanter. Artif. Intell. Agric. 2021, 5, 52–63. [Google Scholar] [CrossRef]
- Kultongkham, A.; Kumnon, S.; Thintawornkul, T.; Chanthsopeephan, T. The design of a force feedback soft gripper for tomato harvesting. J. Agric. Eng. 2021, 52, 1090. [Google Scholar] [CrossRef]
- Chen, J.I.-Z.; Chang, J.-T. Applying a 6-axis Mechanical Arm Combine with Computer Vision to the Research of Object Recognition in Plane Inspection. J. Artif. Intell. Capsul. Netw. 2020, 2, 77–99. [Google Scholar] [CrossRef]
- Bu, L.; Chen, C.; Hu, G.; Sugirbay, A.; Sun, H.; Chen, J. Design and evaluation of a robotic apple harvester using optimized picking patterns. Comput. Electron. Agric. 2022, 198, 107092. [Google Scholar] [CrossRef]
- Williams, H.A.; Jones, M.H.; Nejati, M.; Seabright, M.J.; Bell, J.; Penhall, N.D.; Barnett, J.J.; Duke, M.D.; Scarfe, A.J.; Ahn, H.S.; et al. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms. Biosyst. Eng. 2019, 181, 140–156. Available online: https://www.sciencedirect.com/science/article/pii/S153751101830638X (accessed on 5 October 2023). [CrossRef]
- Kouritem, S.A.; Abouheaf, M.I.; Nahas, N.; Hassan, M. A multi-objective optimization design of industrial robot arms. Alex. Eng. J. 2022, 61, 12847–12867. Available online: https://www.sciencedirect.com/science/article/pii/S1110016822004355 (accessed on 5 October 2023). [CrossRef]
- Arikapudi, R.; Vougioukas, S.G. Robotic Tree-fruit harvesting with arrays of Cartesian Arms: A study of fruit pick cycle times. Comput. Electron. Agric. 2023, 211, 108023. Available online: https://www.sciencedirect.com/science/article/pii/S0168169923004118 (accessed on 5 October 2023). [CrossRef]
- Sarig, Y. Robotics of Fruit Harvesting: A State-of-the-art Review. J. Agric. Eng. Res. 1993, 54, 265–280. [Google Scholar] [CrossRef]
- Van Kollenburg-Crisan, L.M.; Bontsema, J.; Wennekes, P. Mechatronic System for Automatic Harvesting of Cucumbers. IFAC Proc. Vol. 1998, 31, 289–293. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Ceres, R.; Pons, J.L. A Survey of Computer Vision Methods for Locating Fruit on Trees. Trans. ASAE 2000, 43, 1911–1920. [Google Scholar] [CrossRef]
- Edan, Y.; Rogozin, D.; Flash, T.; Miles, G.E. Robotic melon harvesting. IEEE Trans. Robot. Autom. 2000, 16, 831–835. [Google Scholar] [CrossRef]
- Harrell, R.C.; Slaughter, D.C.; Adsit, P.D. A fruit-tracking system for robotic harvesting. Mach. Vis. Appl. 1989, 2, 69–80. [Google Scholar] [CrossRef]
- Slaughter, D.C.; Harrell, R.C. Color Vision in Robotic Fruit Harvesting. Trans. ASAE 1987, 30, 1144–1148. [Google Scholar] [CrossRef]
- Harrell, R.C.; Adsit, P.D.; Pool, T.A.; Hoffman, R. The Florida Robotic Grove-Lab. Trans. ASAE 1990, 33, 391–399. [Google Scholar] [CrossRef]
- Guo, J.; Zhao, D.A.; Ji, W.; Xia, W. Design and control of the open apple-picking-robot manipulator. In Proceedings of the 2010 3rd International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; pp. 5–8. [Google Scholar] [CrossRef]
- Tanigaki, K.; Fujiura, T.; Akase, A.; Imagawa, J. Cherry-harvesting robot. Comput. Electron. Agric. 2008, 63, 65–72. [Google Scholar] [CrossRef]
- Scimeca, L.; Maiolino, P.; Cardin-Catalan, D.; Pobil, A.P.D.; Morales, A.; Iida, F. Non-destructive robotic assessment of mango ripeness via multi-point soft haptics. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1821–1826. [Google Scholar] [CrossRef]
- Neupane, C.; Koirala, A.; Wang, Z.; Walsh, K.B. Evaluation of Depth Cameras for Use in Fruit Localization and Sizing: Finding a Successor to Kinect v2. Agronomy 2021, 11, 1780. [Google Scholar] [CrossRef]
- Ge, Y.; Xiong, Y.; Tenorio, G.L.; From, P.J. Fruit Localization and Environment Perception for Strawberry Harvesting Robots. IEEE Access 2019, 7, 147642–147652. [Google Scholar] [CrossRef]
- Sarabu, H.; Ahlin, K.; Hu, A.P. Leveraging Deep Learning and RGB-D Cameras for Cooperative Apple-Picking Robot Arms. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019; p. 1. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, M.; Wang, C.; Luo, L.; Li, J.; Lian, G.; Zou, X. Recognition and Localization Methods for Vision-Based Fruit Picking Robots: A Review. Front. Plant Sci. 2020, 11, 520170. [Google Scholar] [CrossRef]
- Onishi, Y.; Yoshida, T.; Kurita, H.; Fukao, T.; Arihara, H.; Iwai, A. An automated fruit harvesting robot by using deep learning. ROBOMECH J. 2019, 6, 13. [Google Scholar] [CrossRef]
- Sun, T.; Zhang, W.; Miao, Z.; Zhang, Z.; Li, N. Object localization methodology in occluded agricultural environments through deep learning and active sensing. Comput. Electron. Agric. 2023, 212, 108141. [Google Scholar] [CrossRef]
- Li, T.; Fang, W.; Zhao, G.; Gao, F.; Wu, Z.; Li, R.; Fu, L.; Dhupia, J. An improved binocular localization method for apple based on fruit detection using deep learning. Inf. Process. Agric. 2023, 10, 276–287. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [Google Scholar] [CrossRef]
- Huang, X.R.; Chen, W.H.; Hu, W.C.; Chen, L.B. An AI Edge Computing-Based Robotic Arm Automated Guided Vehicle System for Harvesting Pitaya. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 7–9 January 2022. [Google Scholar] [CrossRef]
- Geer, L.; Gu, D.; Wang, F.; Mohan, V.; Dowling, R. Novel Software Architecture for an Autonomous Agricultural Robotic Fruit Harvesting System. In Proceedings of the 2022 27th International Conference on Automation and Computing (ICAC), Bristol, UK, 1–3 September 2022. [Google Scholar] [CrossRef]
- Vrochidou, E.; Tziridis, K.; Nikolaou, A.; Kalampokas, T.; Papakostas, G.A.; Pachidis, T.P.; Mamalis, S.; Koundouras, S.; Kaburlasos, V.G. An Autonomous Grape-Harvester Robot: Integrated System Architecture. Electronics 2021, 10, 1056. [Google Scholar] [CrossRef]
- Huang, G.S.; Tung, C.K.; Lin, H.C.; Hsiao, S.H. Inverse kinematics analysis trajectory planning for a robot arm. In Proceedings of the 2011 8th Asian Control Conference (ASCC), Kaohsiung, Taiwan, 15–18 May 2011; pp. 965–970. [Google Scholar]
- Font, D.; Pallejà, T.; Tresanchez, M.; Runcan, D.; Moreno, J.; Martínez, D.; Teixidó, M.; Palacín, J. A proposal for automatic fruit harvesting by combining a low cost stereovision camera and a robotic arm. Sensors 2014, 14, 11557–11579. [Google Scholar] [CrossRef]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, integration, and field evaluation of a robotic apple harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar] [CrossRef]
- Ivanova, N.; Gugleva, V.; Dobreva, M.; Pehlivanov, I.; Stefanov, S.; Andonova, V. We Are IntechOpen, the World’s Leading Publisher of Open Access Books Built by Scientists, for Scientists TOP 1%; Intech: London, UK, 2016; Volume i, p. 13. [Google Scholar]
- Kahya, E.; Arın, S. Design of a Robotic Pneumatic Pruner for Robotic Apple Harvesting. Turk. Eur. J. Eng. Nat. Sci. 2019, 3, 11–17. [Google Scholar]
- Zhang, T.; Huang, Z.; You, W.; Lin, J.; Tang, X.; Huang, H. An autonomous fruit and vegetable harvester with a low-cost gripper using a 3D sensor. Sensors 2020, 20, 93. [Google Scholar] [CrossRef]
- Kang, H.; Zhou, H.; Wang, X.; Chen, C. Real-time fruit recognition and grasping estimation for robotic apple harvesting. Sensors 2020, 20, 5670. [Google Scholar] [CrossRef]
- Feng, J.; Liu, G.; Si, Y.; Wang, S.; Zhou, W. Construction of laser vision system for apple harvesting robot. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2013, 29 (Suppl. S1), 32–37. [Google Scholar]
- Arad, B.; Balendonck, J.; Barth, R.; Ben-Shahar, O.; Edan, Y.; Hellström, T.; Hemming, J.; Kurtser, P.; Ringdahl, O.; Tielen, T.; et al. Development of a sweet pepper harvesting robot. J. Field Robot. 2020, 37, 1027–1039. [Google Scholar] [CrossRef]
- Bao, G.; Zhang, S.; Chen, L.; Yang, Q. Design of spherical fruit end-grasper based on FPA. Trans. Chin. Soc. Agric. 2013, 44, 242–246. [Google Scholar]
- Masood, M.U.; Haghshenas-Jaryani, M. A study on the feasibility of robotic harvesting for chile pepper. Robotics 2021, 10, 94. [Google Scholar] [CrossRef]
- Lescure, M. A Scanning Range Finder using the Self-Mixing Effect inside a Laser Diode for 3-D vision. In Quality Measurement: The Indispensable Bridge between Theory and Reality (No Measurements? No Science! Joint Conference—1996: IEEE Instrumentation and Measurement Technology Conference and IMEKO Tec, Brussels, Belgium, 4–6 June 1996; IEEE: Piscataway, NJ, USA, 1996; pp. 226–231. [Google Scholar]
- Zhang, Z.Y.; He, D.J.; Zhang, J.F. Research on controlled system of apple picking robot arm. J. Chin. Agric. Univ. 2008, 13, 78–82. [Google Scholar]
- Reed, J.N.; Miles, S.J.; Butler, J.; Baldwin, M.; Noble, R. Automatic Mushroom Harvester Development. J. Agric. Eng. Res. 2001, 78, 15–23. [Google Scholar] [CrossRef]
- De-An, Z.; Jidong, L.; Wei, J.; Ying, Z.; Yu, C. Design and control of an apple harvesting robot. Biosyst. Eng. 2011, 110, 112–122. [Google Scholar] [CrossRef]
- Almendral, K.A.M.; Babaran, R.M.G.; Carzon, B.J.C.; Cu, K.P.K.; Lalanto, J.M.; Abad, A.C. Autonomous Fruit Harvester with Machine Vision. J. Telecommun. Electron. Comput. Eng. 2018, 10, 79–86. [Google Scholar]
- Gu, B.; Ji, C.; Tian, G.; Zhang, G.; Wang, L. Design and experiment of intelligent mobile fruit picking robot. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2012, 43, 153–160. [Google Scholar] [CrossRef]
- Davidson, J.; Bhusal, S.; Mo, C.; Karkee, M.; Zhang, Q. Robotic manipulation for specialty crop harvesting: A review of manipulator and end-effector technologies. Glob. J. Agric. Allied Sci. 2020, 2, 25–41. [Google Scholar] [CrossRef]
- Zahedi, F.; Lee, H. Human arm stability in relation to damping-defined mechanical environments in physical interaction with a robotic arm. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; Available online: https://ieeexplore.ieee.org/abstract/document/9561794/ (accessed on 5 October 2023).
- Huertas, V.V.; Ilkiv, B.R.; Krasňanský, P.; Tóth, F.; Huertas, V.; Roha’-Ilkiv, B. Basic laboratory experiments with an educational robotic arm. In Proceedings of the 2013 International Conference on Process Control (PC), Strbske Pleso, Slovakia, 18–21 June 2013. [Google Scholar] [CrossRef]
- Haibin, Y.; Cheng, K.; Junfeng, L.; Guilin, Y. Modeling of grasping force for a soft robotic gripper with variable stiffness. Mech. Mach. Theory 2018, 128, 254–274. Available online: https://www.sciencedirect.com/science/article/pii/S0094114X17314957 (accessed on 5 October 2023). [CrossRef]
- Megalingam, R.K.; Vivek, G.V.; Bandyopadhyay, S.; Rahi, M.J. Robotic arm design, development and control for agriculture applications. In Proceedings of the 2017 4th International Conference on Advanced Computing and Communication Systems, Coimbatore, India, 6–7 January 2017. [Google Scholar] [CrossRef]
- Tu, S.; Pang, J.; Liu, H.; Zhuang, N.; Chen, Y.; Zheng, C.; Wan, H.; Xue, Y. Passion fruit detection and counting based on multiple scale faster R-CNN using RGB-D images. Precis. Agric. 2020, 21, 1072–1091. [Google Scholar] [CrossRef]
- Borianne, P.; Borne, F.; Sarron, J.; Faye, E. Deep Mangoes: From fruit detection to cultivar identification in colour images of mango trees. arXiv 2019, arXiv:1909.10939. [Google Scholar]
- Lin, G.; Tang, Y.; Zou, X.; Cheng, J.; Xiong, J. Fruit detection in natural environment using partial shape matching and probabilistic Hough transform. Precis. Agric. 2020, 21, 160–177. [Google Scholar] [CrossRef]
- Luo, W.; Sycara, K. Adaptive sampling and online learning in multi-robot sensor coverage with mixture of gaussian processes. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; Available online: https://ieeexplore.ieee.org/abstract/document/8460473/ (accessed on 5 October 2023).
- Fernandez, R.; Montes, H.; Surdilovic, J.; Surdilovic, D.; Gonzalez-De-Santos, P.; Armada, M. Automatic detection of field-grown cucumbers for robotic harvesting. IEEE Access 2018, 6, 35512–35527. Available online: https://ieeexplore.ieee.org/abstract/document/8399731/ (accessed on 5 October 2023). [CrossRef]
- Kim, E.-S.; Park, S.-Y. Extrinsic Calibration between Camera and LiDAR Sensors by Matching Multiple 3D Planes. Sensors 2019, 20, 52. [Google Scholar] [CrossRef]
- Raju, V.B.; Sazonov, E. FOODCAM: A Novel Structured Light-Stereo Imaging System for Food Portion Size Estimation. Sensors 2022, 22, 3300. [Google Scholar] [CrossRef]
- Mendonck, M.; Hern, M.G. Ultrasonic Propagation in Liquid and Ice Water Drops. s. Effect of porosity. Sensors 2021, 21, 4790. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Jeon, C.; Kim, K.; Seo, J. Uncertainty Assessment of Wave Elevation Field Measurement Using a Depth Camera. J. Mar. Sci. Eng. 2023, 11, 657. [Google Scholar] [CrossRef]
- Grunnet-Jepsen, A.; Tong, D. Depth Post-Processing for Intel® realsenseTM d400 Depth Cameras. Available online: https://www.intel.com/content/dam/support/us/en/documents/emerging-technologies/intel-realsense-technology/Intel-RealSense-Depth-PostProcess.pdf (accessed on 5 October 2023).
- Goldenberg, A.; Benhabib, B.; Fenton, R. A complete generalized solution to the inverse kinematics of robots. IEEE J. Robot. Autom. 1985, 1, 14–20. [Google Scholar] [CrossRef]
- Almusawi, A.R.J.; Dülger, L.C.; Kapucu, S. A new artificial neural network approach in solving inverse kinematics of robotic arm (Denso VP6242). Comput. Intell. Neurosci. 2016, 2016, 5720163. [Google Scholar] [CrossRef]
- Billiot, B.; Cointault, F.; Journaux, L.; Simon, J.-C.; Gouton, P. 3D image acquisition system based on shape from focus technique. Sensors 2013, 13, 5040–5053. [Google Scholar] [CrossRef]
- Mustafah, Y.M.; Noor, R.; Hasbi, H.; Azma, A.W. Stereo vision images processing for real-time object distance and size measurements. In Proceedings of the 2012 International Conference on Computer and Communication Engineering (ICCCE), Kuala Lumpur, Malaysia, 3–5 July 2012; Available online: https://ieeexplore.ieee.org/abstract/document/6271270/ (accessed on 5 October 2023).
- Li, J.; Cui, S.; Zhang, C.; Chen, H. Research on localization of apples based on binocular stereo vision marked by cancroids matching. In Proceedings of the 2012 Third International Conference on Digital Manufacturing & Automation, Guilin, China, 31 July–2 August 2012; Available online: https://ieeexplore.ieee.org/abstract/document/6298609/ (accessed on 5 October 2023).
- Feng, Q.; Cheng, W.; Zhou, J.; Wang, X. Design of structured-light vision system for tomato harvesting robot. Int. J. Agric. Biol. Eng. 2014, 7, 19–26. [Google Scholar] [CrossRef]
- Zou, X.; Zou, H.; Lu, J. Virtual manipulator-based binocular stereo vision positioning system and errors modelling. Mach. Vis. Appl. 2010, 23, 43–63. [Google Scholar] [CrossRef]
- Mehta, S.; Burks, T. Vision-based control of robotic manipulator for citrus harvesting. Comput. Electron. Agric. 2014, 102, 146–158. Available online: https://www.sciencedirect.com/science/article/pii/S0168169914000052 (accessed on 5 October 2023). [CrossRef]
- Irie, N.; Taguchi, N.; Horie, T.; Ishimatsu, T. Asparagus harvesting robot coordinated with 3-D vision sensor. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Churchill, Australia, 10–13 February 2009; Available online: https://ieeexplore.ieee.org/abstract/document/4939556/ (accessed on 5 October 2023).
- Bulanon, D.M.; Kataoka, T. Fruit detection system and an end effector for robotic harvesting of Fuji apples. Agric. Eng. Int. CIGR J. 2010, 12, 203–210. Available online: http://cigrjournal.org/index.php/Ejounral/article/view/1285 (accessed on 5 October 2023).
- Setiawan, A.I.; Furukawa, T.; Preston, A. A low-cost gripper for an apple picking robot. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Available online: https://ieeexplore.ieee.org/abstract/document/1302418/ (accessed on 5 October 2023).
- Wu, D.; Ding, D.; Cui, B.; Jiang, S.; Zhao, E.; Liu, Y.; Cao, C. Design and experiment of vibration plate type camellia fruit picking machine. Int. J. Agric. Biol. Eng. 2022, 15, 130–138. [Google Scholar] [CrossRef]
- Dimeas, F.; Sako, D.V.; Moulianitis, V.C.; Aspragathos, N.A. Design and fuzzy control of a robotic gripper for efficient strawberry harvesting. Robotica 2014, 33, 1085–1098. [Google Scholar] [CrossRef]
- Benavides, M.; Cantón-Garbín, M.; Sánchez-Molina, J.A.; Rodríguez, F. Automatic tomato and peduncle location system based on computer vision for use in robotized harvesting. Appl. Sci. 2020, 10, 5887. [Google Scholar] [CrossRef]
- Kounalakis, N.; Kalykakis, E.; Pettas, M.; Makris, A.; Kavoussanos, M.M.; Sfakiotakis, M.; Fasoulas, J. Development of a Tomato Harvesting Robot: Peduncle Recognition and Approaching. In Proceedings of the 2021 3rd International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 11–13 June 2021; Available online: https://ieeexplore.ieee.org/abstract/document/9461281/ (accessed on 5 October 2023).
- van Herck, L.; Kurtser, P.; Wittemans, L.; Edan, Y. Crop design for improved robotic harvesting: A case study of sweet pepper harvesting. Biosyst. Eng. 2020, 192, 294–308. Available online: https://www.sciencedirect.com/science/article/pii/S1537511020300337 (accessed on 5 October 2023). [CrossRef]
- Chen, Y.; Gunderman, A.; Collins, J.A. Soft Robotic Gripper for Berry Harvesting. U.S. Patent Application 17/525, 12 May 2022. Available online: https://patents.google.com/patent/US20220142050A1/en (accessed on 5 October 2023).
- Lü, Q.; Cai, J.; Liu, B.; Deng, L.; Zhang, Y. Identification of fruit and branch in natural scenes for citrus harvesting robot using machine vision and support vector machine. Int. J. Agric. Biol. Eng. 2014, 7, 115–121. [Google Scholar] [CrossRef]
- Ghazal, S.; Qureshi, W.S.; Khan, U.S.; Iqbal, J.; Rashid, N.; Tiwana, M.I. Analysis of visual features and classifiers for Fruit classification problem. Comput. Electron. Agric. 2021, 187, 106267. Available online: https://www.sciencedirect.com/science/article/pii/S0168169921002842 (accessed on 5 October 2023). [CrossRef]
- Choudhary, P.; Khandekar, R.; Borkar, A.; Chotaliya, P. Image processing algorithm for fruit identification. Int. Res. J. Eng. Technol. 2017, 4, 2741–2743. Available online: https://www.academia.edu/download/53539706/IRJET-V4I3691.pdf (accessed on 5 October 2023).
- Payne, A.; Walsh, K.; Subedi, P.; Jarvis, D. Estimating mango crop yield using image analysis using fruit at ’stone hardening’ stage and night time imaging. Comput. Electron. Agric. 2014, 100, 160–167. Available online: https://www.sciencedirect.com/science/article/pii/S0168169913002810 (accessed on 5 October 2023). [CrossRef]
- Mertens, T.; Kautz, J.; Van Reeth, F. Exposure fusion: A simple and practical alternative to high dynamic range photography. In Computer Graphics Forum; Blackwell Publishing Ltd.: Oxford, UK, 2009; Volume 28, pp. 161–171. [Google Scholar] [CrossRef]
- Barnea, E.; Mairon, R.; Ben-Shahar, O. Colour-agnostic shape-based 3D fruit detection for crop harvesting robots. Biosyst. Eng. 2016, 146, 57–70. Available online: https://www.sciencedirect.com/science/article/pii/S1537511016000131 (accessed on 5 October 2023). [CrossRef]
- Perks, A. Advanced vision guided robotics provide ‘future-proof’ flexible automation. Assem. Autom. 2006, 26, 216–220. [Google Scholar] [CrossRef]
- Copot, C.; Shi, L.; Vanlanduit, S. Automatic tuning methodology of visual servoing system using predictive approach. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; Available online: https://ieeexplore.ieee.org/abstract/document/8899522/ (accessed on 5 October 2023).
- Nakamura, T. Real-time 3-D object tracking using Kinect sensor. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; Available online: https://ieeexplore.ieee.org/abstract/document/6181382/ (accessed on 5 October 2023).
- Sola-Guirado, R.R.; Castro-Garcia, S.; Blanco-Roldá, G.L.; Gil-Ribes, J.A.; Gonzá lez-Sánchez, E.J. Performance evaluation of lateral canopy shakers with catch frame for continuous harvesting of oranges for juice industry. Int. J. Agric. Biol. Eng. 2020, 13, 88–93. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, X.; Au, W.; Kang, H.; Chen, C. Intelligent robots for fruit harvesting: Recent developments and future challenges. Precis. Agric. 2022, 23, 1856–1907. [Google Scholar] [CrossRef]
- Huang, Z.; Gomez, A.; Bird, R.; Kalsi, A.; Jansen, C.; Liu, Z.; Miyauchi, G.; Parsons, S.; Sklar, E. Understanding human responses to errors in a collaborative human-robot selective harvesting task. In Proceeding of the 3rd UK-RAS Conference for PhD Students & Early Career Researchers, Virtual, 20 April 2020. [Google Scholar] [CrossRef]
- Ayomide, O.B.; Ajayi, O.O.; Ajayi, A.A.; Zhang, Q.; Zuo, J.; Yu, T. Design and research on the End Actuator of Tomato Picking Robot. J. Phys. Conf. Ser. 2019, 1314, 012112. [Google Scholar] [CrossRef]
- Han, K.-S.; Kim, S.-C.; Lee, Y.-B.; Kim, S.-C.; Im, D.-H.; Choi, H.-K.; Hwang, H. Strawberry Harvesting Robot for Bench-type Cultivation. J. Biosyst. Eng. 2012, 37, 65–74. [Google Scholar] [CrossRef]
- Raza, M.; Islam, U.; Khan, H.; Iqbal, J.; Ul Islam, R. Modeling and analysis of a 6 DOF robotic arm manipulator. Can. J. Electr. Electron. Eng. 2012, 3, 300–306. Available online: https://www.researchgate.net/profile/Jamshed-Iqbal-2/publication/280643085_Modeling_and_analysis_of_a_6_DOF_robotic_arm_manipulator/links/55c0a56b08aed621de13cf59/Modeling-and-analysis-of-a-6-DOF-robotic-arm-manipulator.pdf (accessed on 5 October 2023).
- Briot, S.; Khalil, W. Dynamics of Parallel Robots; Springer Science and Business Media LLC: Dordrecht, The Netherlands, 2015; p. 35. [Google Scholar] [CrossRef]
- Staicu, S. Dynamics of Parallel Robots; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Component/Equipment Used | Software/Algorithm Used | Performance Results | |
|---|---|---|---|---|
| [75] | Braccio Robotic Arm Arduino Due Intel real sense depth camera | MATLAB Arduino IDE | Localization success rate | 37.7% |
| Detachment success rate | 65.5% | |||
| Harvest success rate | 24.7% | |||
| Cycle time | 7 s | |||
| [73] | Six DOF robotic arm Fotonic F80 camera Custom-built LED-based illumination GPU and PLC | C++ Python ROS Indigo on Ubuntu 14.04 | The harvest success rates. | 61% |
| Cycle time | 24 s | |||
| [67] | Seven DOF manipulator Custom end-effector Single CCD color camera TOF-based 3D camera | MATLAB C++ domain. | Localization success rate | 100% |
| The harvest success rates. | 84.6% | |||
| Cycle time | 7.6 s | |||
| [68] | Logitech cam Supplementary halogen lamps Adafruit GPS breakout module Arduino Uno | V-REP ROS MATLAB | Localization success rate | 94% |
| Cycle time | 2 s | |||
| [65] | servos (RX-64) Cine camera | MATLAB | N/A | |
| [70] | Kinect RGB-Depth camera 6 DOF ARM Custom made gripper | Mask R-CNN ROS | Fruit detection success | 87% |
| Cutting point detection | 71% | |||
| The harvest success | 52% | |||
| [35] | Pentium IV 2 GHz PC with 1 GB RAM Industrial robot (Panasonic VR006L) Touch panel PC with HMI Custom gripper | Halcon Software | Fruit detection success | 80% |
| Fruit harvesting success | 80% | |||
| Cycle time | 9 s | |||
| [71] | Universal Robot UR5 Customized soft end-effector. Intel D-435 camera NVIDIA GTX-1070 GPU | ROS Linux Ubuntu 16.04 RealSense package ROS MoveIt | DasNet Recognition success | 91% |
| Mobile-DasNet Recognitio success | 90% | |||
| [69] | Custom made end-effector | C# | Detection success | 85% |
| Harvesting success | 73% | |||
| [66] | Minoru 3D USB Webcam 3D printed robotic arm. STM32F407VGT6 controller | N/A | Distance error of | 6% |
| Cycle time | 16 s | |||
| [52] | Five DOF robotic arm Infra-red laser diodes AC servo motors Computer | N/A | Localization success rate | 60% |
| Fruit harvesting success | 80% | |||
| Cycle time | 14 s | |||
| [78] | 486 DX 33 MHz Computer Fluorescent tube, Phillips TLE 23 W/29 Pulnix TM 500 camera | N/A | Localization success rate | 70% |
| Fruit harvesting success | 76% | |||
| Cycle time | 8 s | |||
| [80] | Six DOF Robotic manipulator Electric cart Arduino Microcontroller ZED Stereo camera Webcam (A4tecch) Ultrasonic Sensor (US-100) | Arduino IDE Green Detection Algorithm Open CV Library Visual Studio | Localization success rate | 75% |
| Fruit harvesting success | 85% | |||
| Cycle time | 9.41 s | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaleem, A.; Hussain, S.; Aqib, M.; Cheema, M.J.M.; Saleem, S.R.; Farooq, U. Development Challenges of Fruit-Harvesting Robotic Arms: A Critical Review. AgriEngineering 2023, 5, 2216-2237. https://doi.org/10.3390/agriengineering5040136
Kaleem A, Hussain S, Aqib M, Cheema MJM, Saleem SR, Farooq U. Development Challenges of Fruit-Harvesting Robotic Arms: A Critical Review. AgriEngineering. 2023; 5(4):2216-2237. https://doi.org/10.3390/agriengineering5040136
Chicago/Turabian StyleKaleem, Abdul, Saddam Hussain, Muhammad Aqib, Muhammad Jehanzeb Masud Cheema, Shoaib Rashid Saleem, and Umar Farooq. 2023. "Development Challenges of Fruit-Harvesting Robotic Arms: A Critical Review" AgriEngineering 5, no. 4: 2216-2237. https://doi.org/10.3390/agriengineering5040136