

Extended Kalman Filter Design for Tracking Time-of-Flight and Clock Offsets in a Two-Way Ranging System
Abstract
:1. Introduction
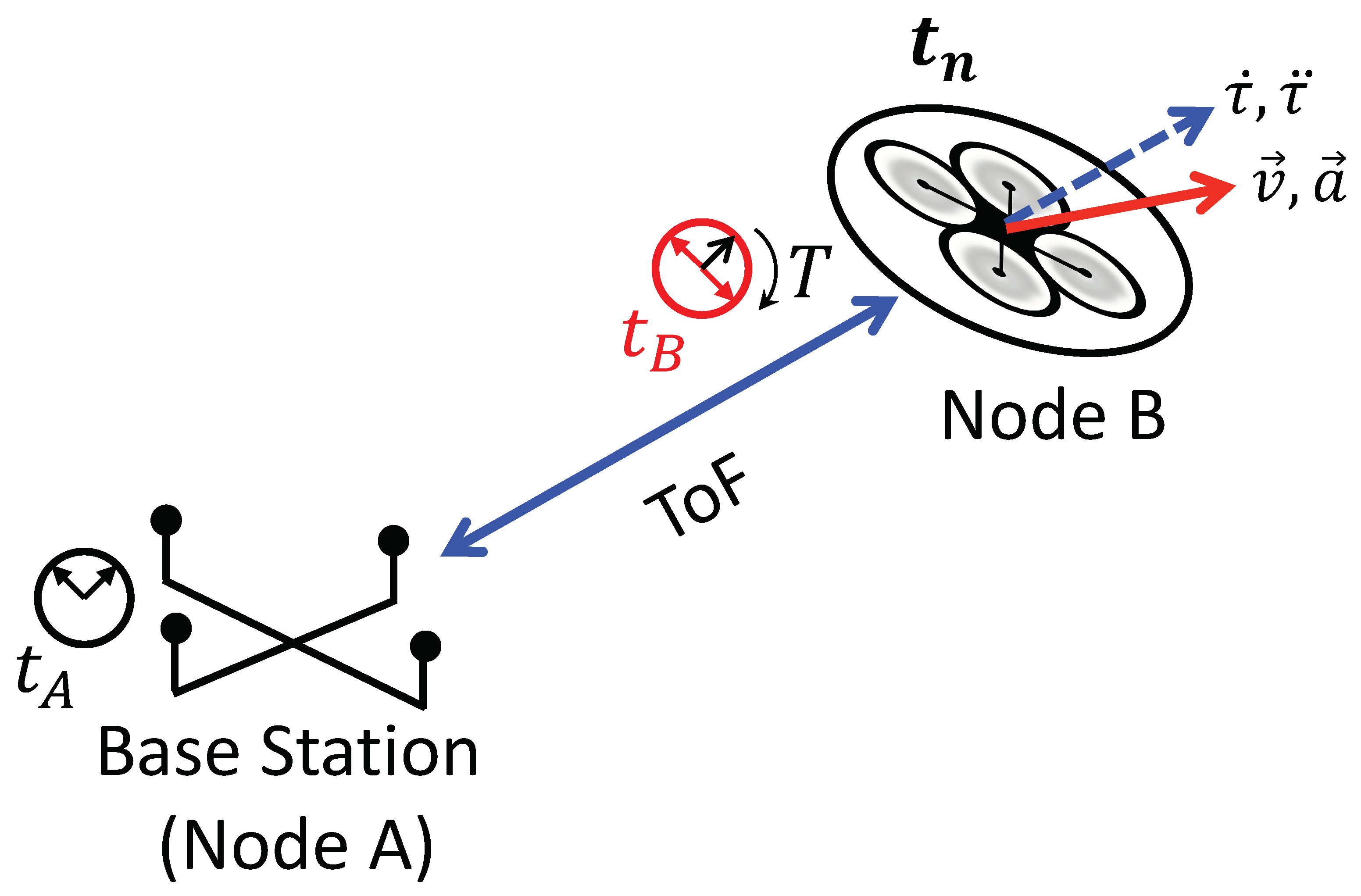
1.1. System Overview
1.2. Contributions
- We derive a family of optimal extended Kalman filter (EKF) tracking algorithms that jointly estimate time-of-flight and clock offsets in a two-way ranging network.
- We implement the proposed EKF solutions and the corresponding optimal one-shot estimators in a simple MATLAB simulation environment.
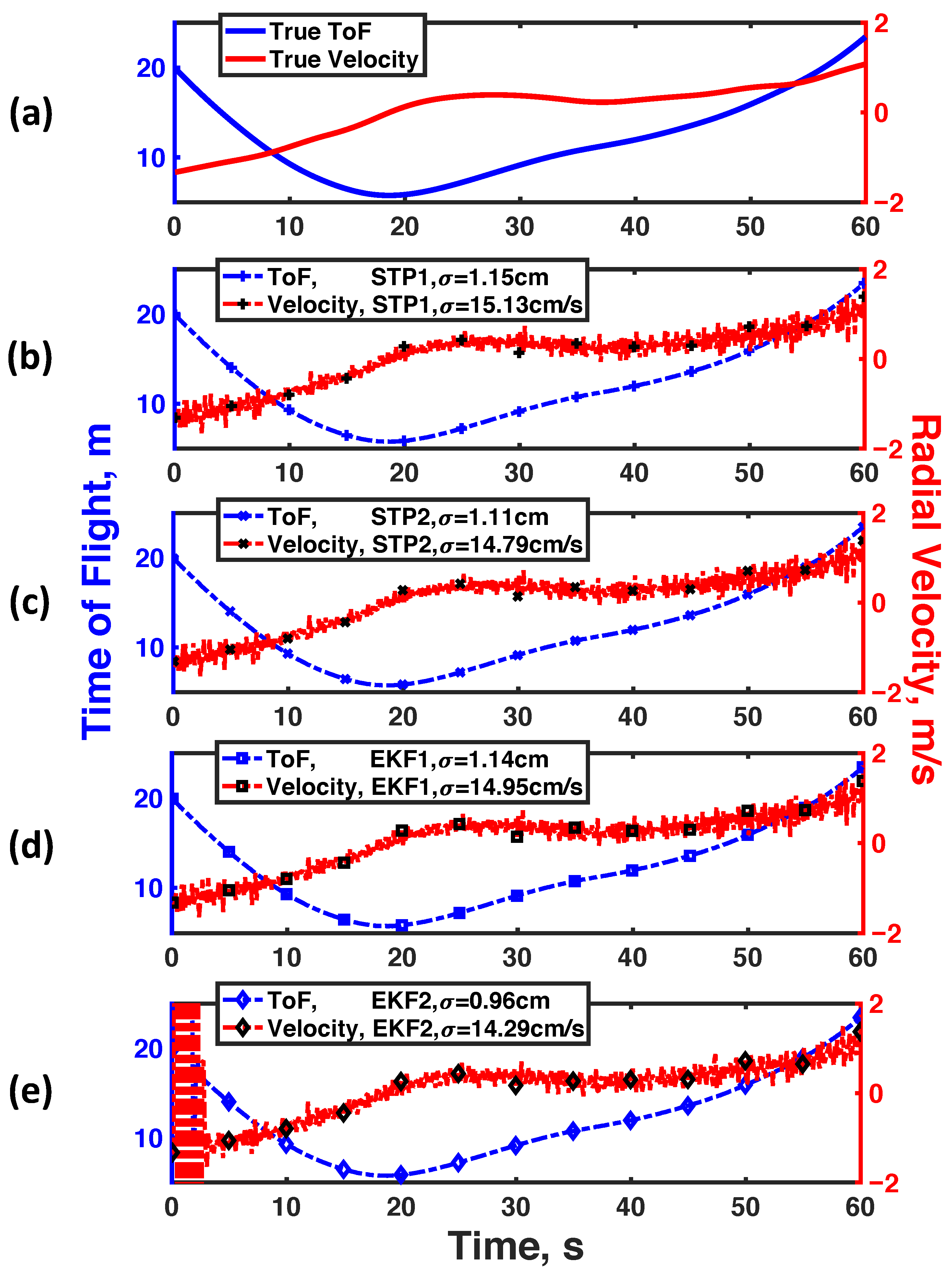
- We demonstrate that the proposed solution achieves comparable estimation performance to the existing one-shot solutions and, in the case of the second-order solution, reduces the computation time by an order of magnitude.
1.3. Organization
2. Background
2.1. Clock Synchronization
2.2. Statistical Clock Models
3. Problem Formulation
3.1. Problem Setup
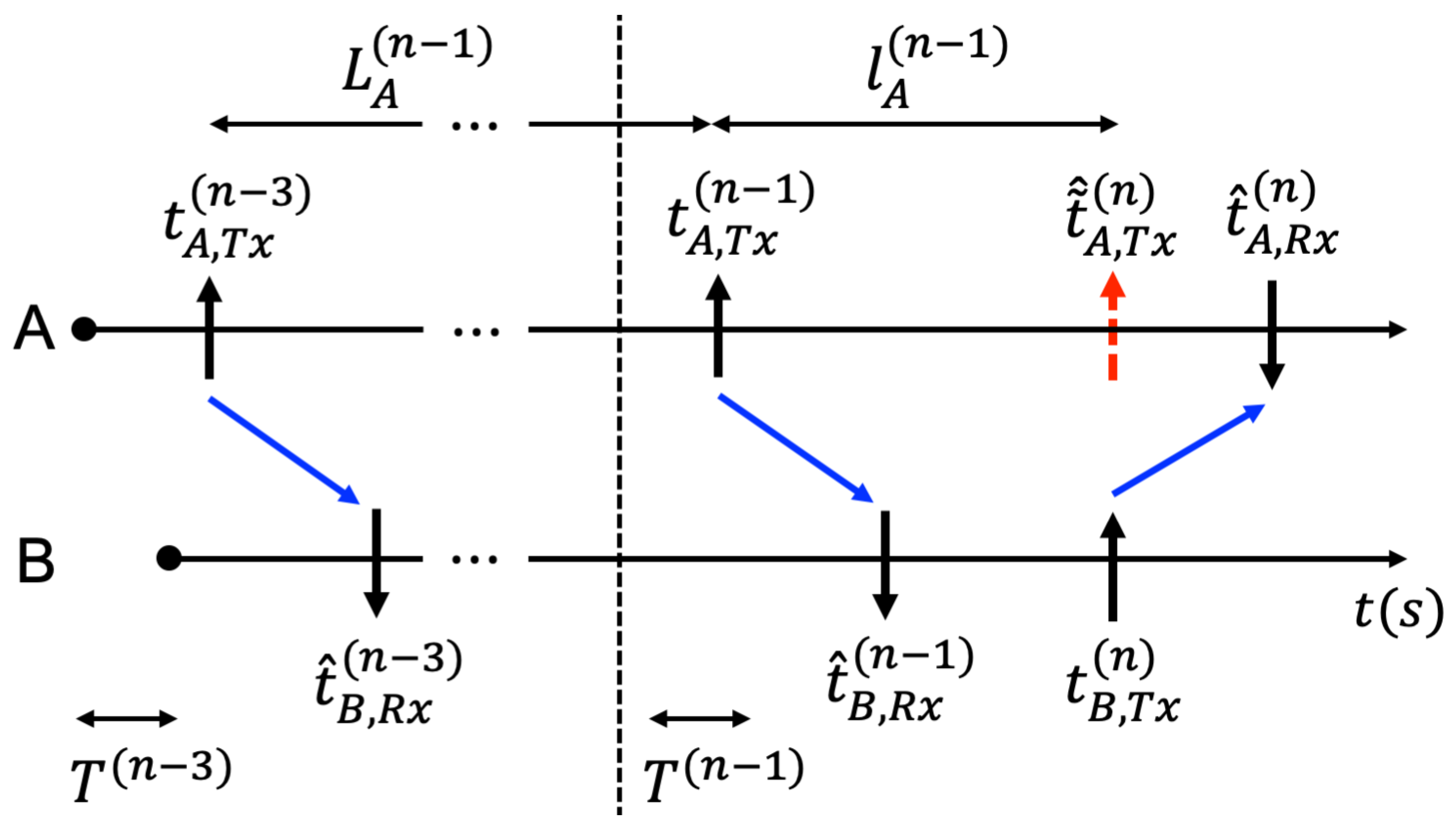
3.2. Timing Exchange Protocol
4. Optimal One-Shot Estimators
4.1. First-Order Models
4.2. Second-Order Models
5. Extended Kalman Filter Tracking
5.1. Tracking Preliminaries
| Algorithm 1: Extended Kalman Filter Tracking Algorithm |
end |
5.2. First-Order Extended Kalman Filter
5.3. Second Order Models
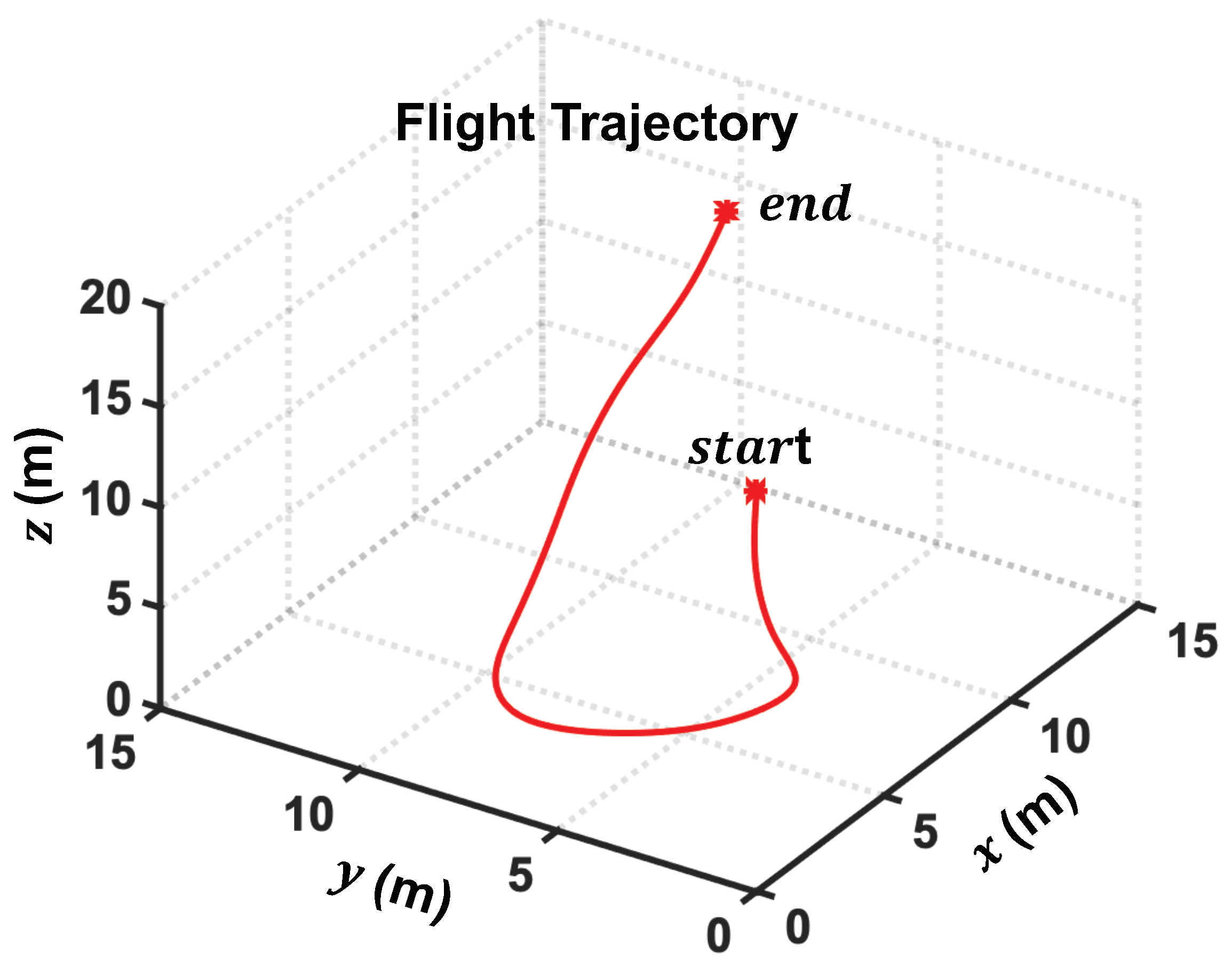
6. Simulation Results
6.1. Simulated Computation Time
6.2. Simulated Time Delay Estimation Performance

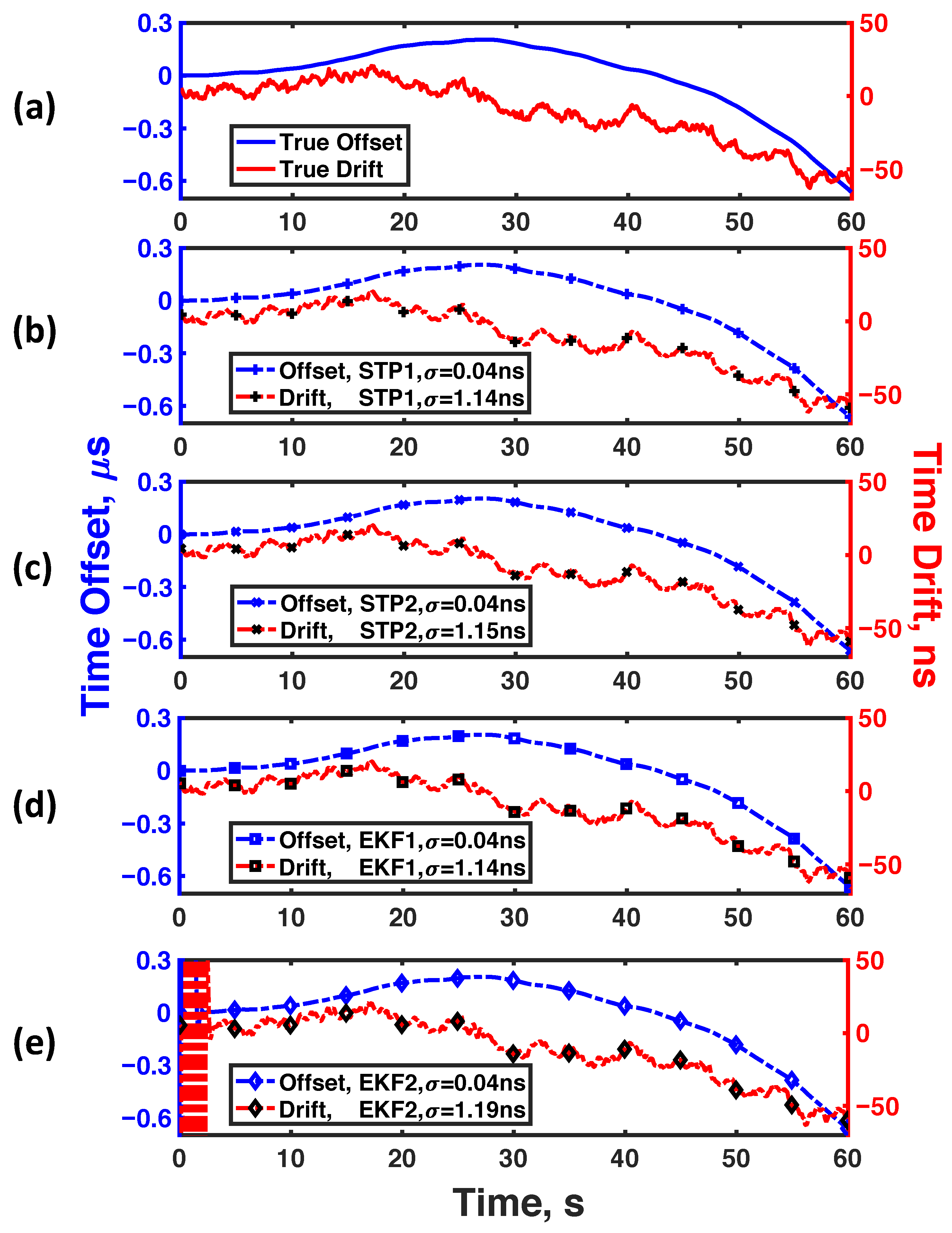
6.3. Simulated Time Offset Estimation Performance

7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AoA | angle of arrival |
| EKF | extended Kalman filter |
| FANET | flying ad hoc network |
| GPS | Global Positioning System |
| IoT | Internet of Things |
| ITS | intelligent transport system |
| LoS | line of sight |
| NTP | Network Timing Protocol |
| RMSE | root mean square error |
| RSS | received signal strength |
| TDoA | time difference of arrival |
| ToA | time of arrival |
| ToF | time of flight |
| TWR | two-way ranging |
| UAV | unmanned aerial vehicle |
| WSN | wireless sensor network |
References
- Paul, B.; Chiriyath, A.R.; Bliss, D.W. Survey of RF communications and sensing convergence research. IEEE Access 2017, 5, 252–270. [Google Scholar] [CrossRef]
- Chiriyath, A.R.; Paul, B.; Jacyna, G.M.; Bliss, D.W. Inner bounds on performance of radar and communications co-existence. IEEE Trans. Signal Process. 2015, 64, 464–474. [Google Scholar] [CrossRef]
- Chiriyath, A.R.; Paul, B.; Bliss, D.W. Radar-Communications Convergence: Coexistence, Cooperation, and Co-Design. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 1–12. [Google Scholar] [CrossRef]
- Herschfelt, A.; Yu, H.; Wu, S.; Lee, H.; Bliss, D.W. Joint Positioning-Communications System Design: Leveraging Phase-Accurate Time-of-Flight Estimation and Distributed Coherence. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 433–437. [Google Scholar]
- Herschfelt, A.; Yu, H.; Wu, S.; Srinivas, S.; Li, Y.; Sciammetta, N.; Smith, L.; Rueger, K.; Lee, H.; Chakrabarti, C.; et al. Joint positioning-communications system design and experimental demonstration. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–6. [Google Scholar]
- Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E.; Fansler, A.A. Evaluation of smart grid and civilian UAV vulnerability to GPS spoofing attacks. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, TN, USA, 17–21 September 2012. [Google Scholar]
- Humphreys, T. Statement on the Vulnerability of Civil Unmanned Aerial Vehicles and Other Systems to Civil GPS Spoofing; University of Texas at Austin: Austin, TX, USA, 2012; pp. 1–16. [Google Scholar]
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned aircraft capture and control via GPS spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Srinivas, S.; Herschfelt, A.; Bliss, D.W. Joint positioning-communications system: Optimal distributed coherence and positioning estimators. In Proceedings of the 2019 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019; pp. 317–321. [Google Scholar]
- Sayed, A.H.; Tarighat, A.; Khajehnouri, N. Network-based wireless location: Challenges faced in developing techniques for accurate wireless location information. IEEE Signal Process. Mag. 2005, 22, 24–40. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F. Mobile positioning using wireless networks: Possibilities and fundamental limitations based on available wireless network measurements. IEEE Signal Process. Mag. 2005, 22, 41–53. [Google Scholar] [CrossRef]
- Gezici, S. A survey on wireless position estimation. Wirel. Pers. Commun. 2008, 44, 263–282. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man, Cybern. Part C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Mesmoudi, A.; Feham, M.; Labraoui, N. Wireless sensor networks localization algorithms: A comprehensive survey. arXiv 2013, arXiv:1312.4082. [Google Scholar] [CrossRef]
- Guvenc, I.; Chong, C.C. A survey on TOA based wireless localization and NLOS mitigation techniques. IEEE Commun. Surv. Tutorials 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Lanzisera, S.; Zats, D.; Pister, K.S. Radio frequency time-of-flight distance measurement for low-cost wireless sensor localization. IEEE Sensors J. 2011, 11, 837–845. [Google Scholar] [CrossRef]
- Weiss, A.; Weinstein, E. Fundamental limitations in passive time delay estimation–Part I: Narrow-band systems. IEEE Trans. Acoust. Speech Signal Process. 1983, 31, 472–486. [Google Scholar] [CrossRef]
- Bidigare, P.; Madhow, U.; Mudumbai, R.; Scherber, D. Attaining fundamental bounds on timing synchronization. In Proceedings of the 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Kyoto, Japan, 25–30 March 2012; pp. 5229–5232. [Google Scholar]
- Lewandowski, W.; Thomas, C. GPS time transfer. Proc. IEEE 1991, 79, 991–1000. [Google Scholar] [CrossRef]
- Lewandowski, W.; Azoubib, J.; Klepczynski, W.J. GPS: Primary tool for time transfer. Proc. IEEE 1999, 87, 163–172. [Google Scholar] [CrossRef]
- Sivrikaya, F.; Yener, B. Time synchronization in sensor networks: A survey. IEEE Netw. 2004, 18, 45–50. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 138–149. [Google Scholar]
- Li, Q.; Rus, D. Global clock synchronization in sensor networks. IEEE Trans. Comput. 2006, 55, 214–226. [Google Scholar]
- Schenato, L.; Gamba, G. A distributed consensus protocol for clock synchronization in wireless sensor network. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 2289–2294. [Google Scholar]
- Maggs, M.K.; O’keefe, S.G.; Thiel, D.V. Consensus clock synchronization for wireless sensor networks. IEEE Sensors J. 2012, 12, 2269–2277. [Google Scholar] [CrossRef]
- Mills, D.L. Internet time synchronization: The network time protocol. IEEE Trans. Commun. 1991, 39, 1482–1493. [Google Scholar] [CrossRef] [Green Version]
- Mills, D. Network Time Protocol (version 3) Specification, Implementation and Analysis. Technical Report, Internet Society. 1992. Available online: https://www.rfc-editor.org/rfc/rfc1305 (accessed on 15 May 2023).
- Eidson, J.; Lee, K. IEEE 1588 standard for a precision clock synchronization protocol for networked measurement and control systems. In Proceedings of the Sensors for Industry Conference, 2002. 2nd ISA/IEEE, Reston, VA, USA, 3–5 December 2002; Volume 10. [Google Scholar]
- Sichitiu, M.L.; Veerarittiphan, C. Simple, accurate time synchronization for wireless sensor networks. In Proceedings of the 2003 IEEE Wireless Communications and Networking, 2003. WCNC 2003, New Orleans, LA, USA, 16–20 March 2003; Volume 2, pp. 1266–1273. [Google Scholar]
- Van Greunen, J.; Rabaey, J. Lightweight time synchronization for sensor networks. In Proceedings of the 2nd ACM international conference on Wireless sensor networks and applications, San Diego, CA, USA, 19 September 2003; pp. 11–19. [Google Scholar]
- Brown III, D.R.; Klein, A.G.; Wang, R. Non-Hierarchical Clock Synchronization for Wireless Sensor Networks. arXiv 2012, arXiv:1212.1216. [Google Scholar]
- Preuss, R.D.; Brown, D.R. Retrodirective distributed transmit beamforming with two-way source synchronization. In Proceedings of the 2010 44th Annual Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 17–19 March 2010; pp. 1–6. [Google Scholar]
- Brown, D.R.; Klein, A.G. Precise timestamp-free network synchronization. In Proceedings of the 2013 47th Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 20–22 March 2013; pp. 1–6. [Google Scholar]
- Bidigare, P.; Pruessing, S.; Raeman, D.; Scherber, D.; Madhow, U.; Mudumbai, R. Initial over-the-air performance assessment of ranging and clock synchronization using radio frequency signal exchange. In Proceedings of the Statistical Signal Processing Workshop (SSP), Ann Arbor, MI, USA, 5–8 August 2012; pp. 273–276. [Google Scholar]
- Denis, B.; Pierrot, J.B.; Abou-Rjeily, C. Joint distributed synchronization and positioning in UWB ad hoc networks using TOA. IEEE Trans. Microw. Theory Tech. 2006, 54, 1896–1911. [Google Scholar] [CrossRef]
- Gelb, A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Courier Corporation: Chelmsford, MA, USA, 2012. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Fluids Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Galleani, L.; Tavella, P. The characterization of clock behavior with the dynamic Allan variance. In Proceedings of the IEEE International Frequency Control Symposium and PDA Exhibition Jointly with the 17th European Frequency and Time Forum, Tampa, FL, USA, 4–8 May 2003; pp. 239–244. [Google Scholar]
- Zucca, C.; Tavella, P. The clock model and its relationship with the Allan and related variances. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 289–296. [Google Scholar] [CrossRef] [PubMed]
- Greenhall, C.A. Forming stable timescales from the Jones–Tryon Kalman filter. Metrologia 2003, 40, S335. [Google Scholar] [CrossRef]
- Giorgi, G.; Narduzzi, C. Performance analysis of Kalman-filter-based clock synchronization in IEEE 1588 networks. IEEE Trans. Instrum. Meas. 2011, 60, 2902–2909. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I. Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Galleani, L. A tutorial on the two-state model of the atomic clock noise. Metrologia 2008, 45, S175. [Google Scholar] [CrossRef]
- Davis, J.A.; Greenhall, C.; Stacey, P. A Kalman filter clock algorithm for use in the presence of flicker frequency modulation noise. Metrologia 2005, 42, 1. [Google Scholar] [CrossRef] [Green Version]
- Rutman, J. Characterization of phase and frequency instabilities in precision frequency sources: Fifteen years of progress. Proc. IEEE 1978, 66, 1048–1075. [Google Scholar] [CrossRef]
- Percival, D.B. Stochastic models and statistical analysis for clock noise. Metrologia 2003, 40, S289. [Google Scholar] [CrossRef] [Green Version]
- Chan, Y.T.; Tsui, W.Y.; So, H.C.; Ching, P.C. Time-of-arrival based localization under NLOS conditions. IEEE Trans. Veh. Technol. 2006, 55, 17–24. [Google Scholar] [CrossRef]
- Seco, F.; Jiménez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A survey of mathematical methods for indoor localization. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 9–14. [Google Scholar]
- Herschfelt, A. Simultaneous Positioning and Communications: Hybrid Radio Architecture, Estimation Techniques, and Experimental Validation. Ph.D. Thesis, Arizona State University, Tempe, AZ, USA, 2019. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmit event timestamps at node A | |
| Receive event timestamps at node A | |
| Transmit event timestamps at node B | |
| Receive event timestamps at node B | |
| Transmit event time-stamp at node A | |
| Frame length at node A | |
| Cycle length at node A | |
| Relative ToF | |
| Relative velocity | |
| Relative acceleration | |
| T | Relative time offset |
| Relative frequency offset | |
| Relative frequency drift |
| , | Predicted and estimated state parameters |
| Cardinality of state space | |
| State transition matrix | |
| , | Predicted and observed measurements |
| Control parameters | |
| , | Measurement transition and Jacobian |
| , | State and measurement noise |
| , | State and measurement noise covariance matrix |
| , | Predicted and estimated state covariance matrix |
| Measurement covariance matrix | |
| Kalman gain |
| Optimal One-Shot Estimator—First-Order | 0.93 ms |
| Optimal One-Shot Estimator—Second-Order | 49.0 ms |
| Extended Kalman Filter Tracking—First-Order | 1.30 ms |
| Extended Kalman Filter Tracking—Second-Order | 2.60 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Srinivas, S.; Herschfelt, A.; Bliss, D.W. Extended Kalman Filter Design for Tracking Time-of-Flight and Clock Offsets in a Two-Way Ranging System. Signals 2023, 4, 439-456. https://doi.org/10.3390/signals4020023
Srinivas S, Herschfelt A, Bliss DW. Extended Kalman Filter Design for Tracking Time-of-Flight and Clock Offsets in a Two-Way Ranging System. Signals. 2023; 4(2):439-456. https://doi.org/10.3390/signals4020023
Chicago/Turabian StyleSrinivas, Sharanya, Andrew Herschfelt, and Daniel W. Bliss. 2023. "Extended Kalman Filter Design for Tracking Time-of-Flight and Clock Offsets in a Two-Way Ranging System" Signals 4, no. 2: 439-456. https://doi.org/10.3390/signals4020023