

Study on Fluid–Structure Interaction of a Camber Morphing Wing
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
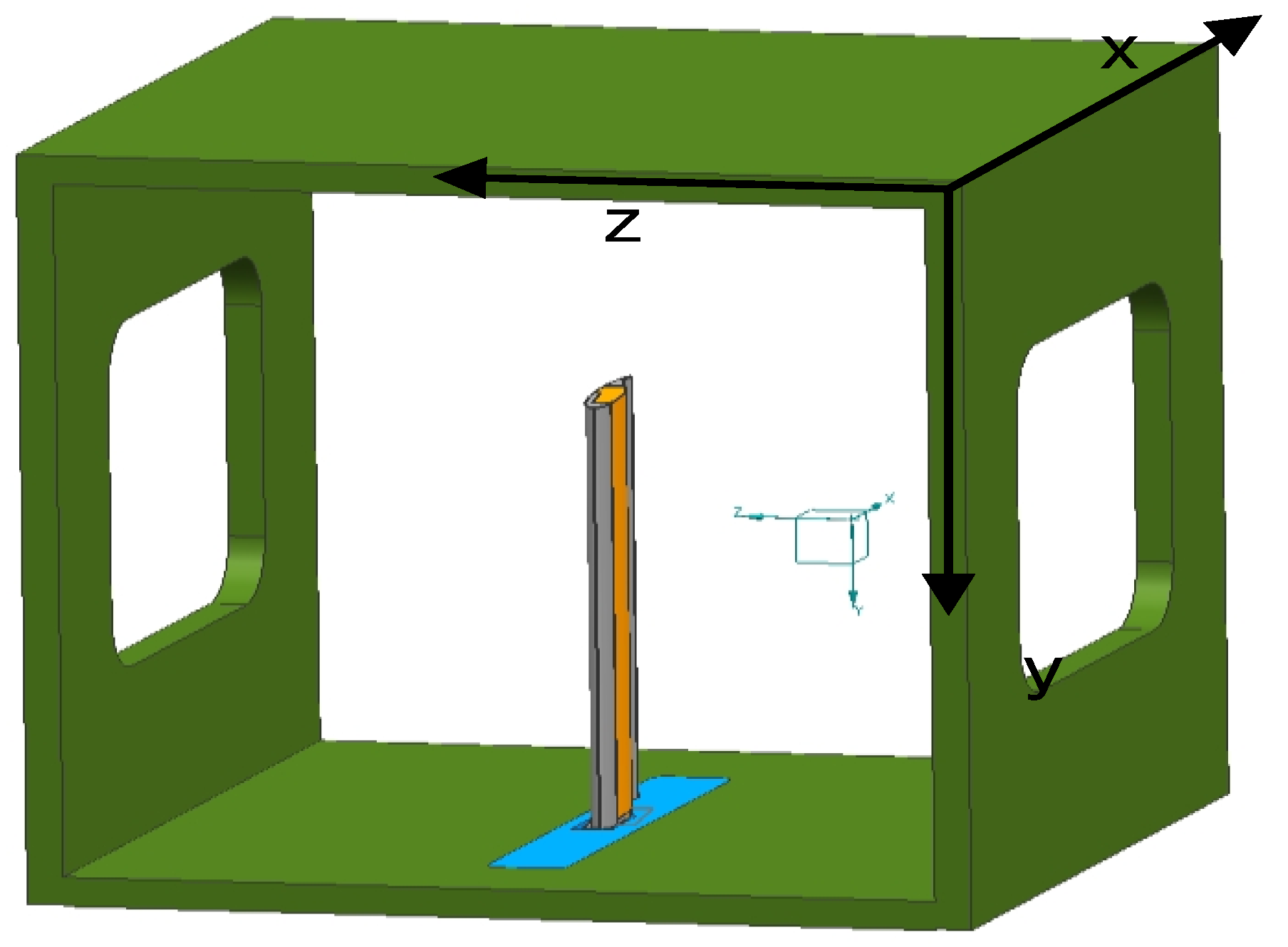
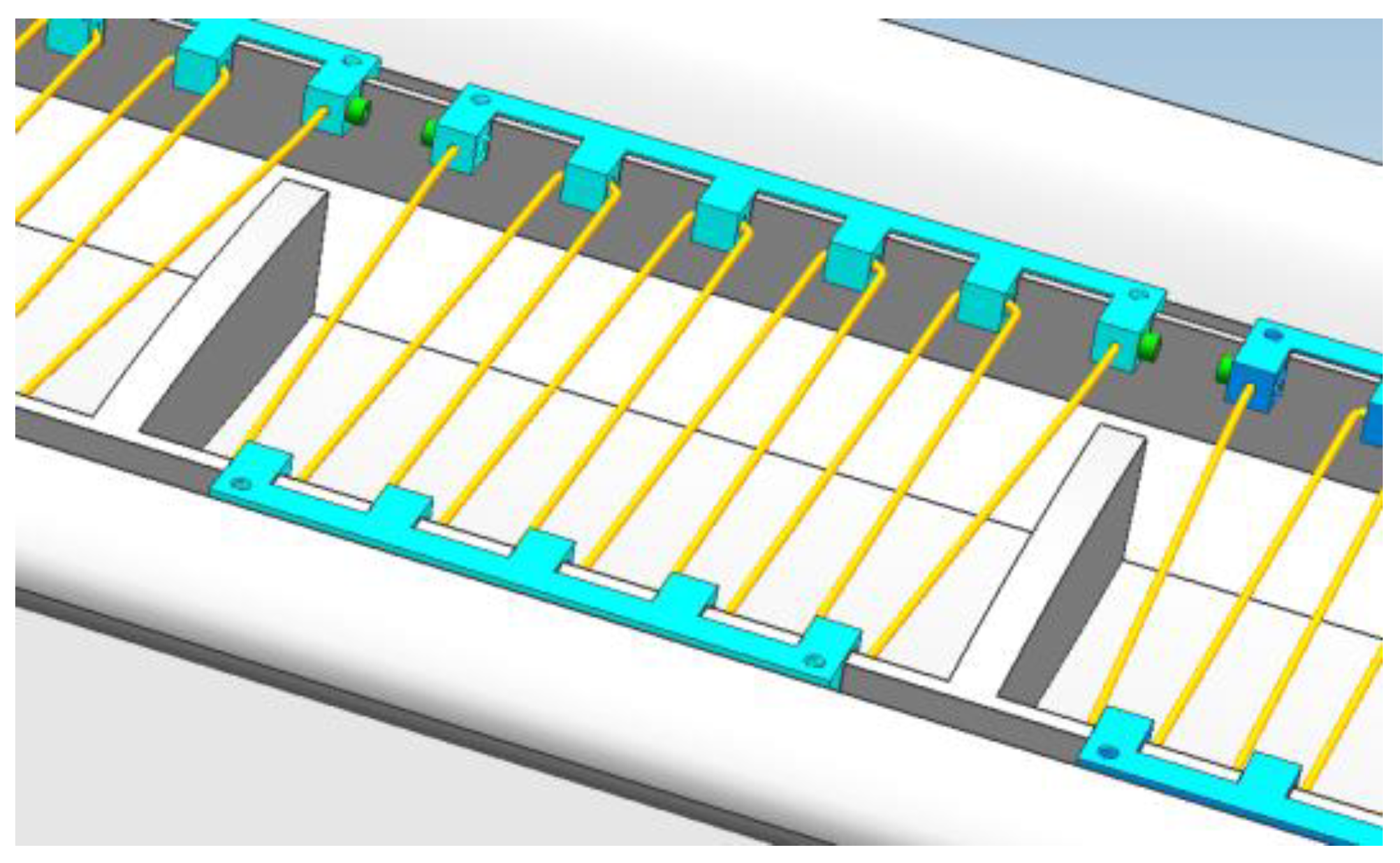
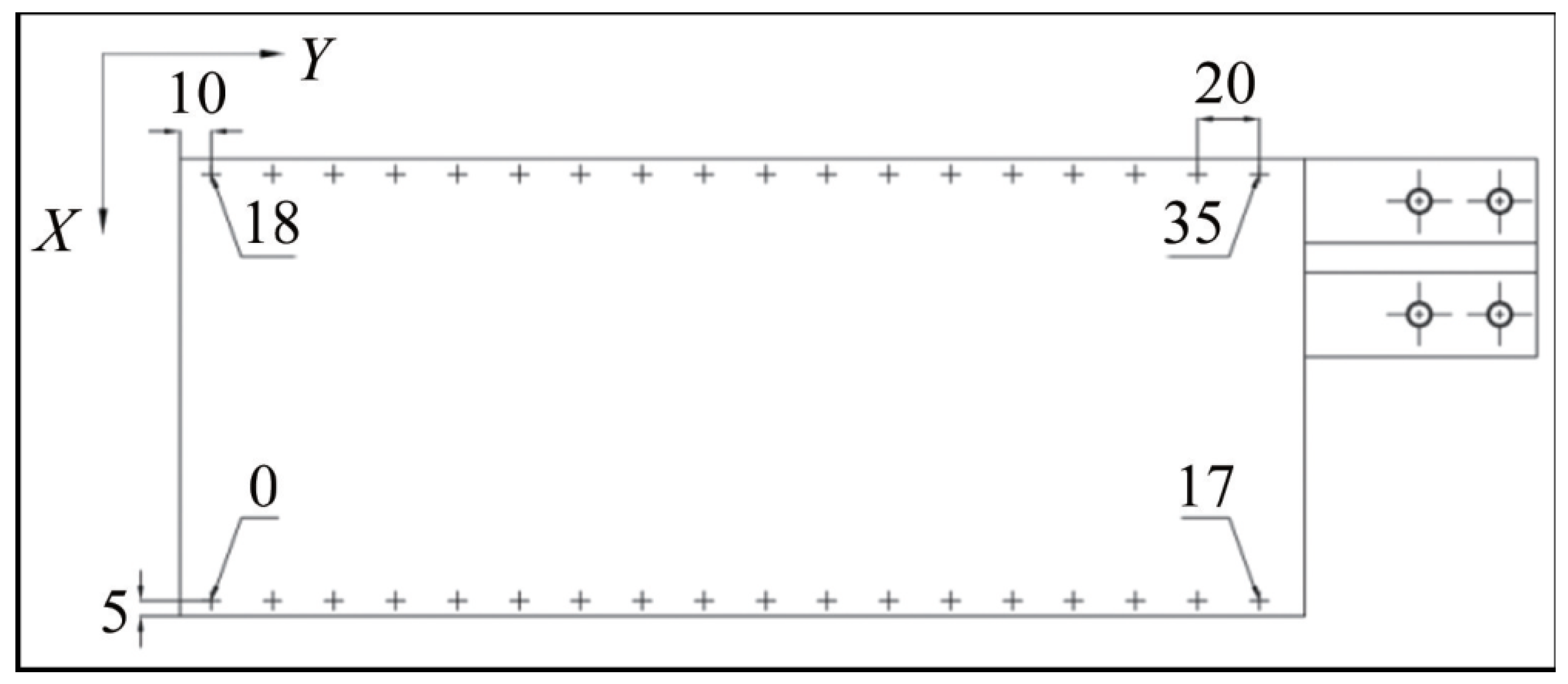
2. Model Definition and Morphing Structures
3. Test and Numerical Methods
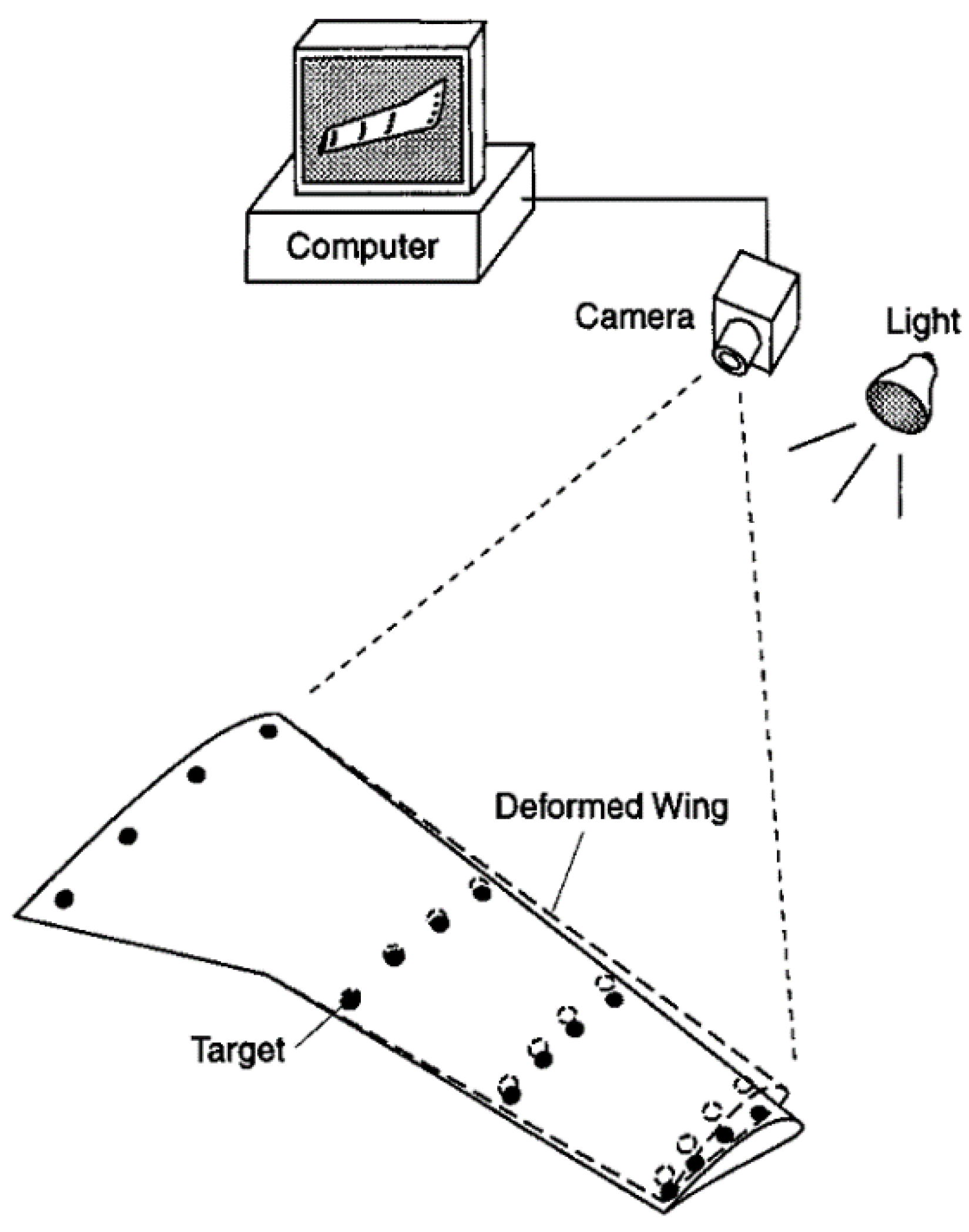
3.1. Facilities
3.2. Numerical Methods
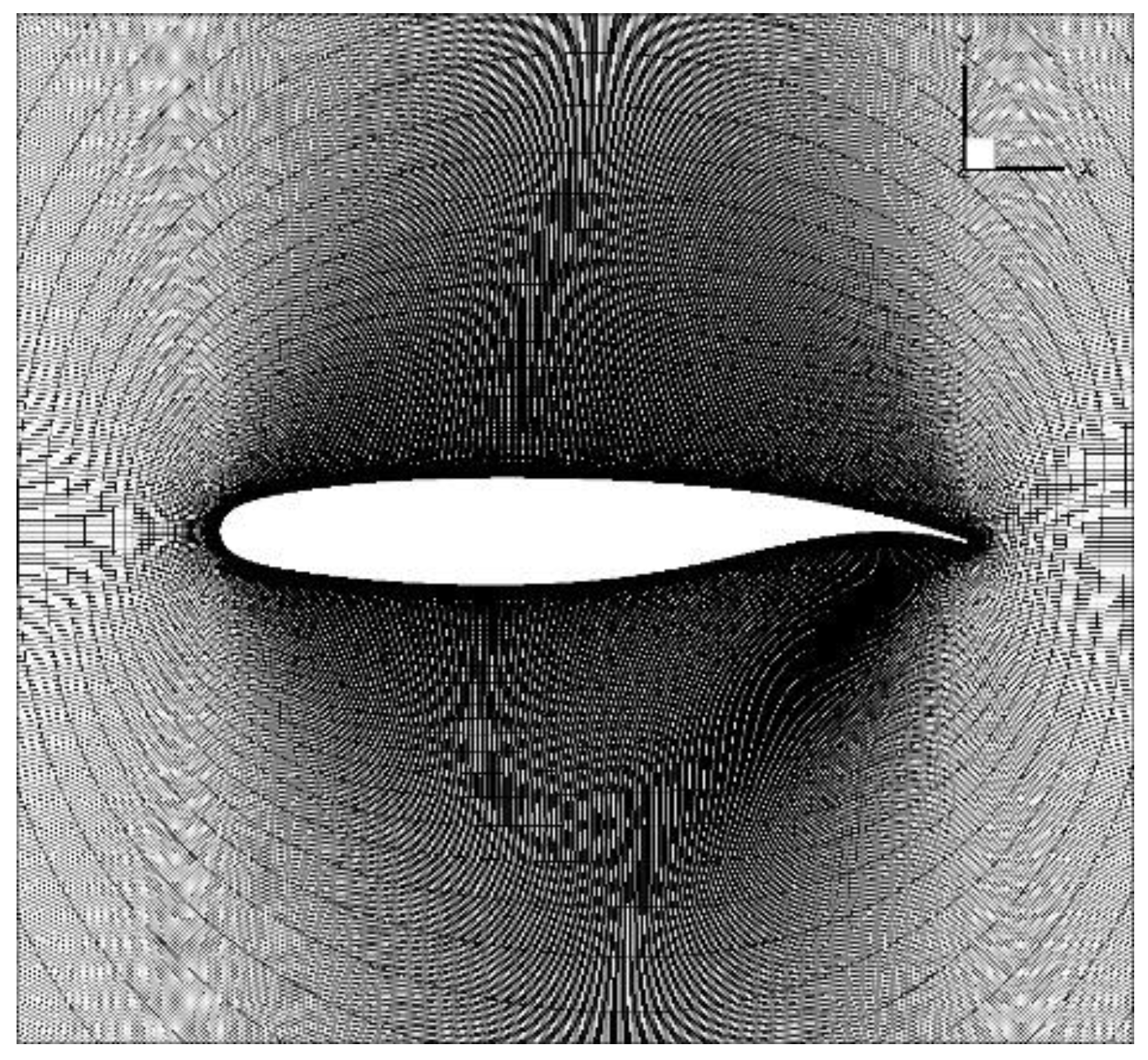
3.2.1. CFD Model
3.2.2. Structural Motion Calculation
3.2.3. Fluid–Structure Interaction Mode
3.2.4. Data Exchange between Different Physical Fields
4. Results
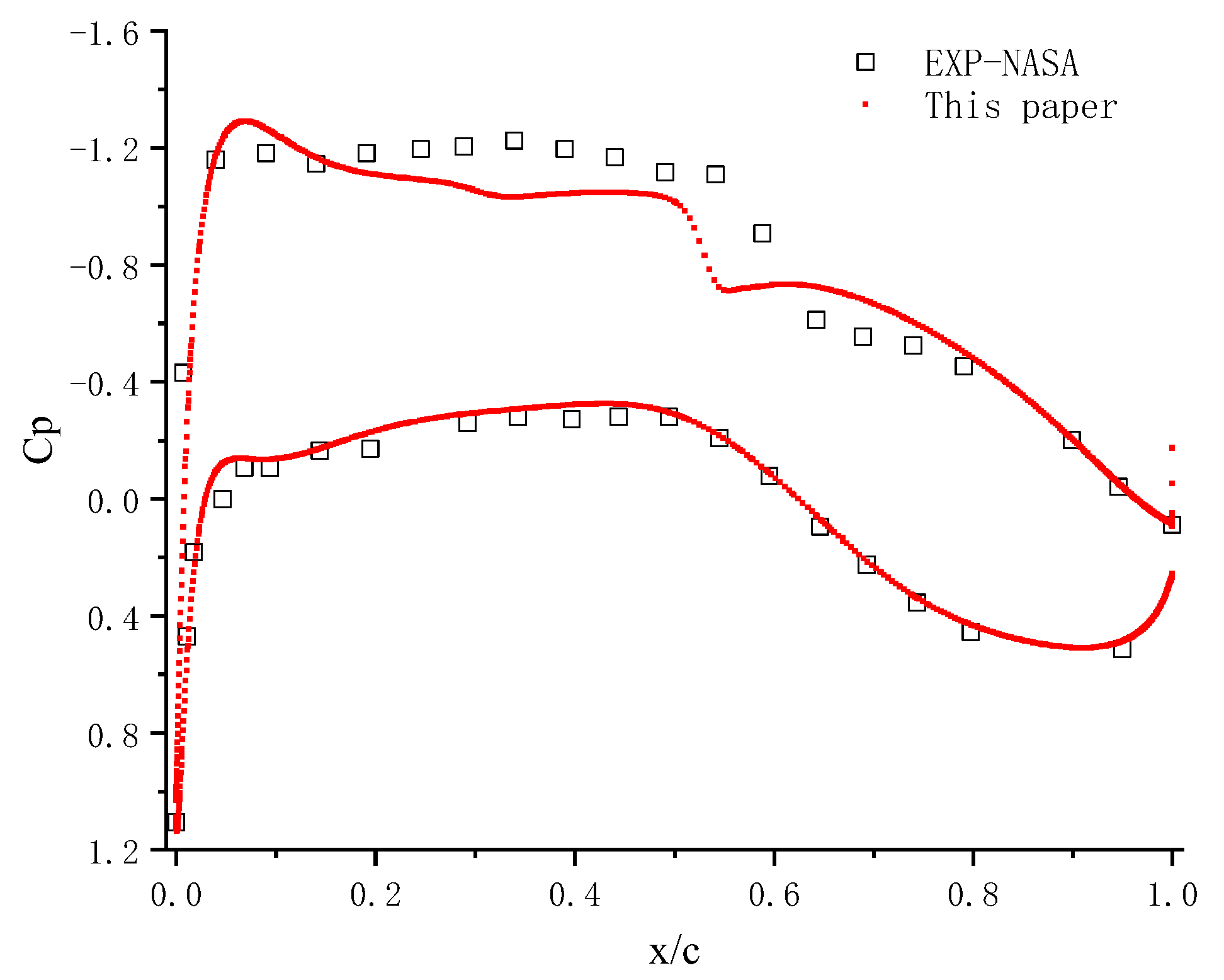
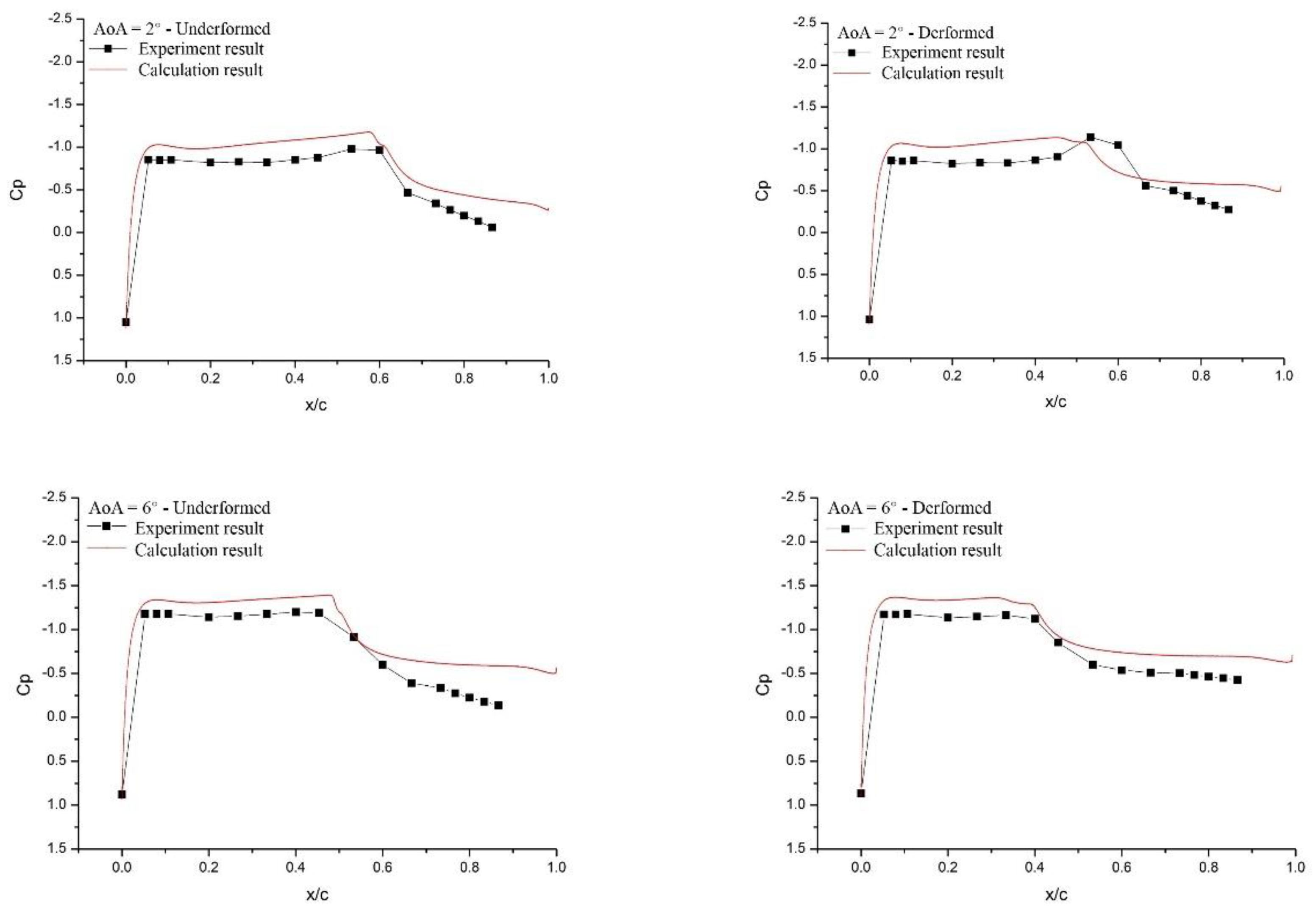
4.1. Comparison of CFD Results with Test Results
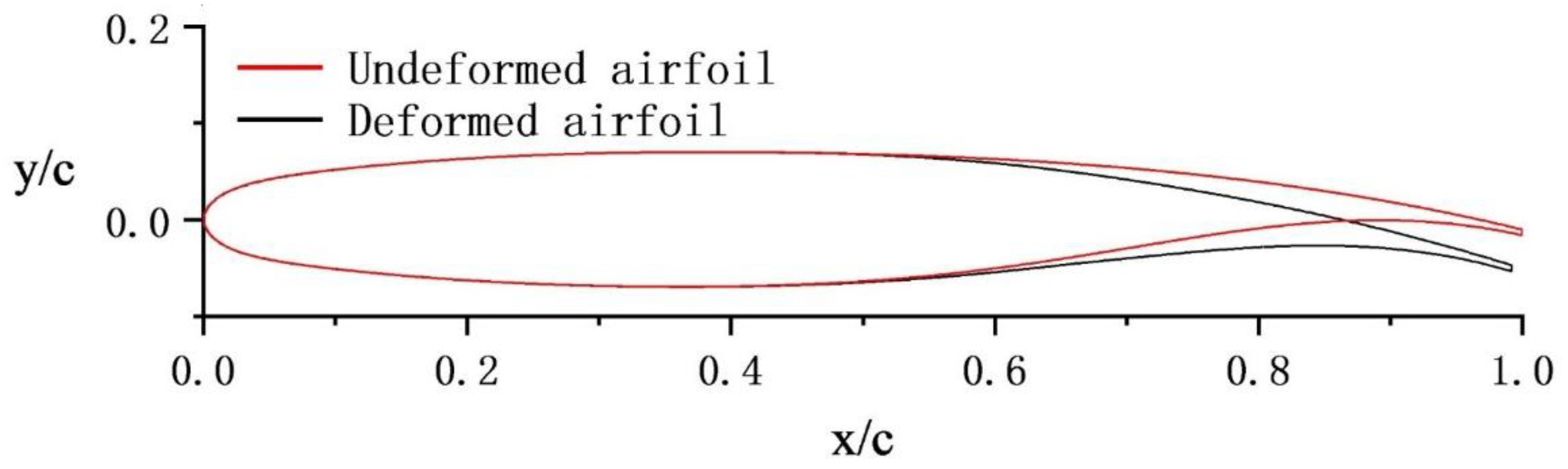
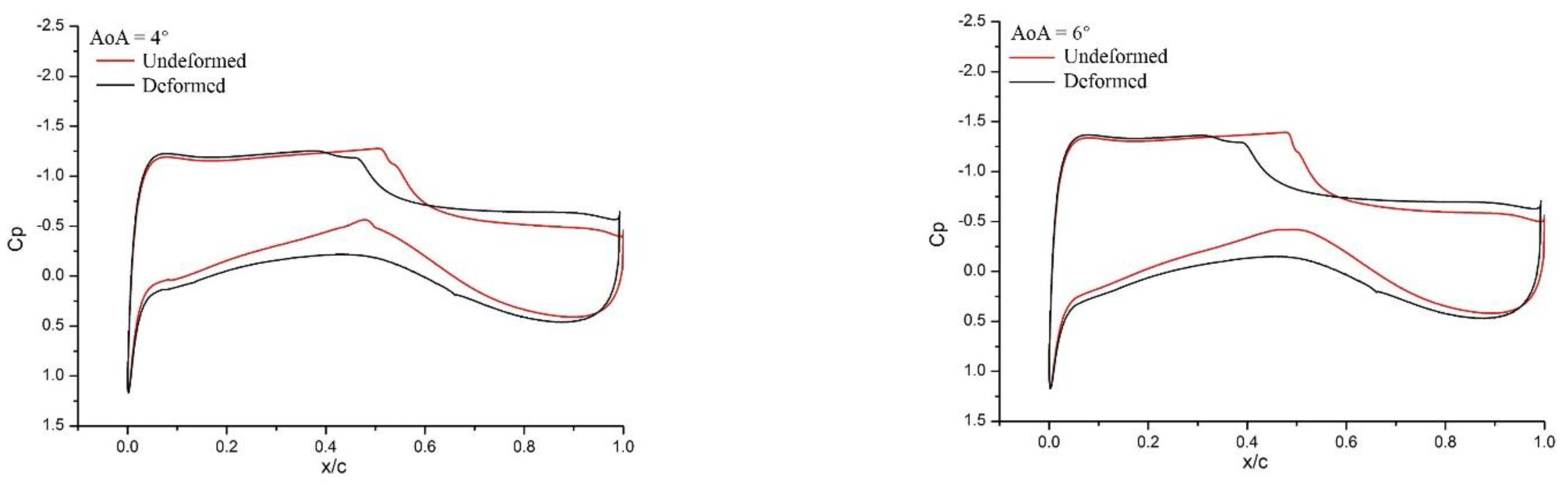
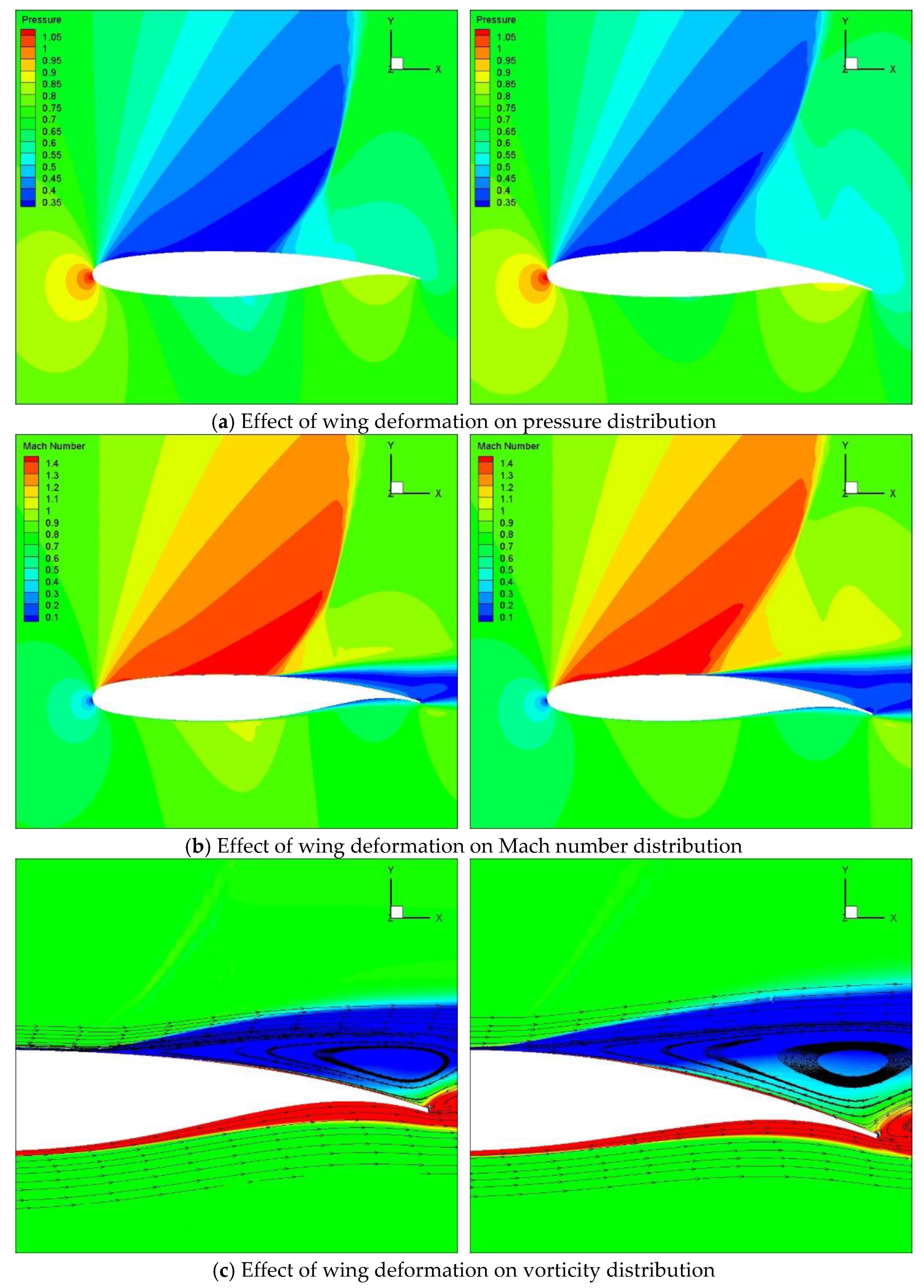
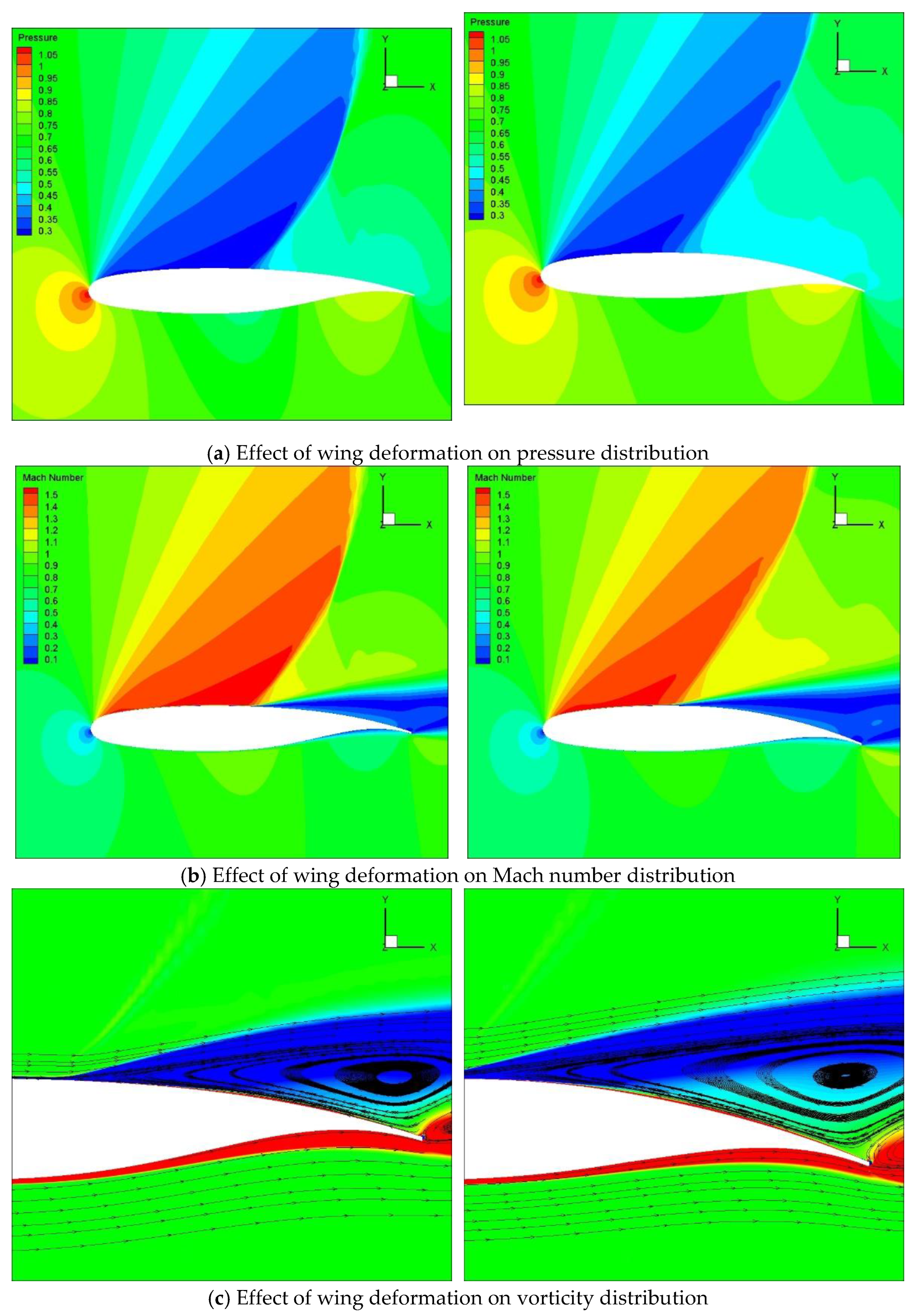
4.2. Effect of Wing Deformation on Flow Structure
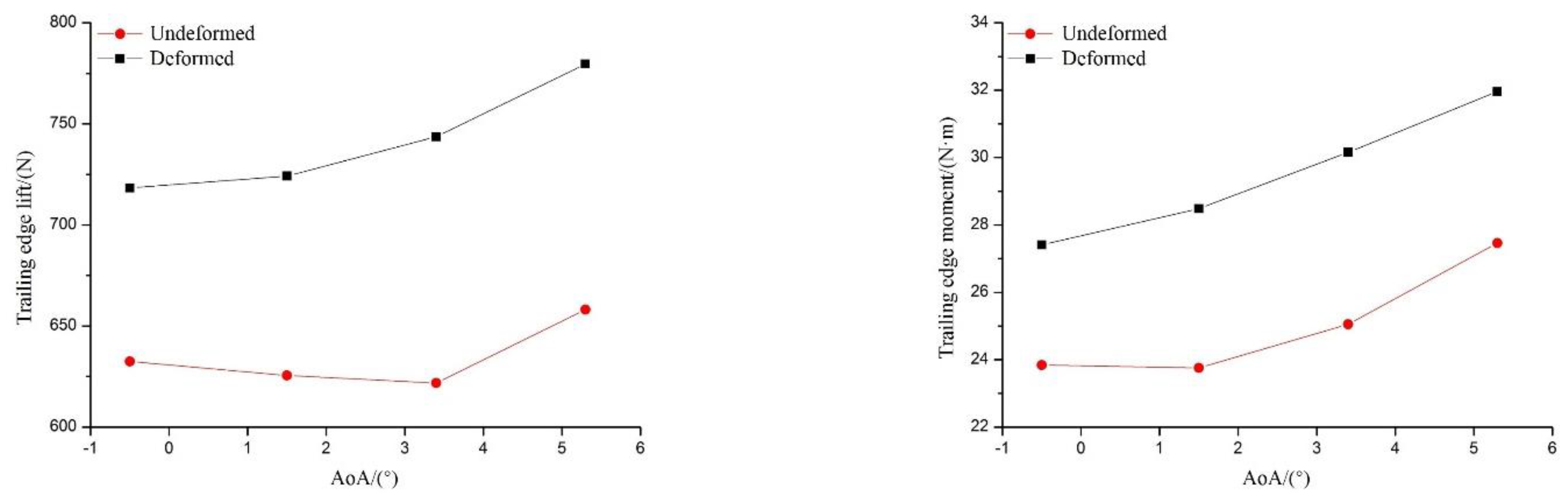
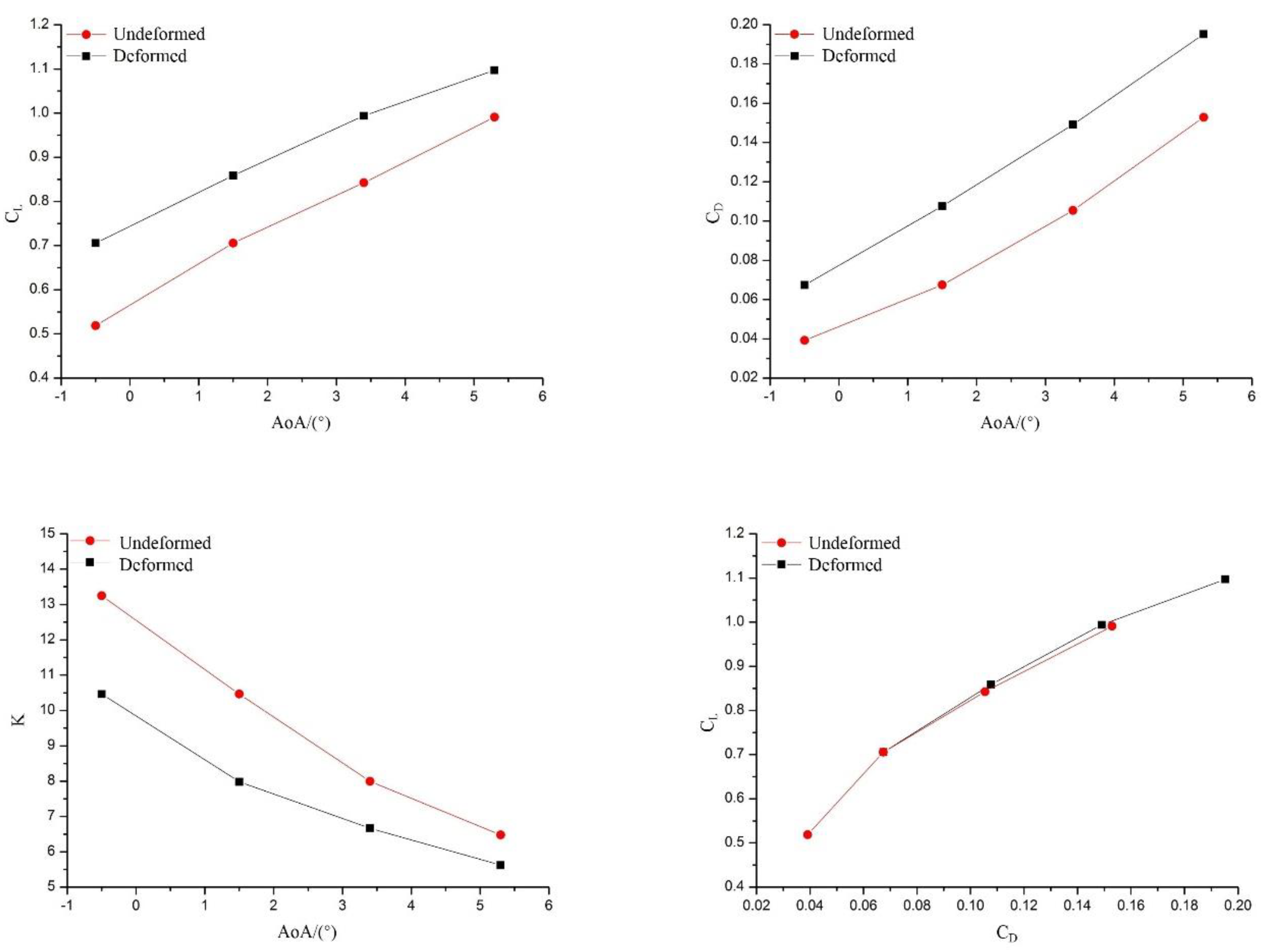
4.3. Deformation’s Impact on Aerodynamic Characteristics
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Isobaric specific heat | |
| ρ∞ | Incoming flow density |
| u∞ | Incoming flow velocity |
| T | Incoming flow turbulence |
| μl | Laminar viscosity coefficient of the incoming flow |
| ρ1, d1 | Density of the first layer of the grid center near the object surface and the distance to the model surface |
| Structural deformation vector of the model surface | |
| , | Generalized displacement and the generalized aerodynamic force, respectively |
| , , | Generalized mass, damping, and stiffness matrices of the structure |
| Generalized aerodynamics, which link the structure with aerodynamics | |
| Fs, Fa | Structural point force vector and aerodynamic force vector, respectively |
References
- Wlezien, R.W.; Horner, G.C.; McGowan, A.-M.R.; Padula, S.L.; Scott, M.A.; Silcox, R.J.; Harrison, J.S. Aircraft morphing program. In Smart Structures and Materials 1998: Industrial and Commercial Applications of Smart Structures Technologies; SPIE: Bellingham, WA, USA, 1998; pp. 176–187. [Google Scholar]
- Bashir, M.; Longtin-Martel, S.; Botez, R.M.; Wong, T. Aerodynamic design optimization of a morphing leading edge and trailing edge airfoil–application on the uas-s45. Appl. Sci. 2021, 11, 1664. [Google Scholar] [CrossRef]
- Ozbek, E.; Ekici, S.; Karakoc, T.H. Unleashing the Potential of Morphing Wings: A Novel Cost Effective Morphing Method for UAV Surfaces, Rear Spar Articulated Wing Camber. Drones 2023, 7, 379. [Google Scholar] [CrossRef]
- Bye, D.; Mcclure, P. Design of a morphing vehicle. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007; p. 1728. [Google Scholar]
- Le Sant, Y.; Mignosi, A.; Deléglise, B.; Bourguignon, G. Model deformation measurement (MDM) at Onera. In Proceedings of the 25th AIAA Applied Aerodynamics Conference, Miami, FL, USA, 25–28 June 2007; p. 3817. [Google Scholar]
- Kudva, J.N. Overview of the DARPA smart wing project. J. Intell. Mater. Syst. Struct. 2004, 15, 261–267. [Google Scholar] [CrossRef]
- Ivanco, T.; Scott, R.; Love, M.; Zink, S.; Weisshaar, T. Validation of the Lockheed Martin morphing concept with wind tunnel testing. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007; p. 2235. [Google Scholar]
- Flanagan, J.; Strutzenberg, R.; Myers, R.; Rodrian, J. Development and flight testing of a morphing aircraft, the NextGen MFX-1. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007; p. 1707. [Google Scholar]
- Ruyten, W.; Sellers, M. Demonstration of optical wing deformation measurements at the Arnold engineering development center. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009; p. 1520. [Google Scholar]
- Bowman, J.; Sanders, B.; Cannon, B.; Kudva, J.; Joshi, S.; Weisshaar, T. Development of next generation morphing aircraft structures. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007; p. 1730. [Google Scholar]
- Skvarenina, T.L. The Power Electronics Handbook; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Burner, A.; Liu, T. Videogrammetric model deformation measurement technique. J. Aircr. 2001, 38, 745–754. [Google Scholar] [CrossRef]
- Zhao, Z.; Ren, X.; Gao, C.; Xiong, J.; Liu, F.; Luo, S. Experimental study of shock wave oscillation on SC (2)-0714 airfoil. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013; p. 537. [Google Scholar]
- Kancharla, A.K.; Roy Mahapatra, D. Aerodynamic pressure variation over SMA wire integrated morphing aerofoil. In Proceedings of the 49th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, 16th AIAA/ASME/AHS Adaptive Structures Conference, 10th AIAA Non-Deterministic Approaches Conference, 9th AIAA Gossamer Spacecraft Forum, 4th AIAA Multidisciplinary Design Optimization Specialists Conference, Schaumburg, IL, USA, 7–10 April 2008; p. 2044. [Google Scholar]
- Lv, B.; Wang, Y.; Lei, P. Effects of trailing edge deflections driven by shape memory alloy actuators on the transonic aerodynamic characteristics of a super critical airfoil. Actuators 2021, 10, 160. [Google Scholar] [CrossRef]
- Brailovski, V.; Terriault, P.; Georges, T.; Coutu, D. SMA actuators for morphing wings. Phys. Procedia 2010, 10, 197–203. [Google Scholar] [CrossRef]
- Cevdet, Ö.; Özbek, E.; Ekici, S. A review on applications and effects of morphing wing technology on uavs. Int. J. Aviat. Sci. Technol. 2021, 1, 30–40. [Google Scholar]
- Mohd Jani, J.; Leary, M.; Subic, A. Designing shape memory alloy linear actuators: A review. J. Intell. Mater. Syst. Struct. 2017, 28, 1699–1718. [Google Scholar] [CrossRef]
- Wang, Y.; Lv, B.; Lei, P.; Shi, W.; Yan, Y. Study on Flow Mechanism of a Morphing Supercritical Airfoil. Shock. Vib. 2021, 2021, 5588056. [Google Scholar] [CrossRef]
- Tang, W.; Sandström, R. Limitations of constitutive relations for TiNi shape memory alloys. J. Phys. IV 1995, 5, C8-185–C188-190. [Google Scholar] [CrossRef]
- Spillman, W., Jr.; Sirkis, J.; Gardiner, P. Smart materials and structures: What are they? Smart Mater. Struct. 1996, 5, 247. [Google Scholar] [CrossRef]
- Wada, K.; Liu, Y. Some factors affecting the shape recovery properties of NiTi SMA. In Proceedings of the 47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference 14th AIAA/ASME/AHS Adaptive Structures Conference 7th, Newport, RI, USA, 1–4 May 2006; p. 1969. [Google Scholar]
- Li, W.; Xiong, K.; Chen, H.; Zhang, X.; Su, Y.; Ren, Z. Research on variable cant angle winglets with shape memory alloy spring actuators. Acta Aeronaut. Et Astronaut. Sin. 2012, 33, 22–33. [Google Scholar]
- Jenkins, R.V. Aerodynamic Performance and Pressure Distributions for a NASA SC (2)-0714 Airfoil Tested in the Langley 0.3-Meter Transonic Cryogenic Tunnel; National Aeronautics and Space Administration, Scientific and Technical: Washington, DC, USA, 1988; Volume 4044. [Google Scholar]
- Chong, K.P.; Garboczi, E.J. Smart and designer structural material systems. Prog. Struct. Eng. Mater. 2002, 4, 417–430. [Google Scholar] [CrossRef]
- Jenkins, R.V. NASA SC (2)-0714 Airfoil Data Corrected for Sidewall Boundary-Layer Effects in the Langley 0.3-Meter Transonic Cryogenic Tunnel; NASA, Scientific and Technical Information Division: Washington, DC, USA, 1989; Volume 2890. [Google Scholar]
- Grigorie, T.L.; Botez, R.M. A Self–Tuning Intelligent Controller for a Smart Actuation Mechanism of a Morphing Wing Based on Shape Memory Alloys. Actuators 2023, 12, 350. [Google Scholar] [CrossRef]
- Precup, N.; Mor, M.; Livne, E. The design, construction, and tests of a concept aeroelastic wind tunnel model of a high-lift variable camber continuous trailing edge flap (HL-VCCTEF) wing configuration. In Proceedings of the 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015; p. 1406. [Google Scholar]
- Icardi, U.; Ferrero, L. Preliminary study of an adaptive wing with shape memory alloy torsion actuators. Mater. Des. 2009, 30, 4200–4210. [Google Scholar] [CrossRef]
- Livne, E.; Precup, N.; Mor, M. Design, construction, and tests of an aeroelastic wind tunnel model of a variable camber continuous trailing edge flap (VCCTEF) concept wing. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2014; p. 2442. [Google Scholar]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Lei, P.; Lv, B.; Li, Y.; Guo, H. Study on Fluid–Structure Interaction of a Camber Morphing Wing. Vibration 2023, 6, 1060-1074. https://doi.org/10.3390/vibration6040062
Wang Y, Lei P, Lv B, Li Y, Guo H. Study on Fluid–Structure Interaction of a Camber Morphing Wing. Vibration. 2023; 6(4):1060-1074. https://doi.org/10.3390/vibration6040062
Chicago/Turabian StyleWang, Yuanjing, Pengxuan Lei, Binbin Lv, Yuchen Li, and Hongtao Guo. 2023. "Study on Fluid–Structure Interaction of a Camber Morphing Wing" Vibration 6, no. 4: 1060-1074. https://doi.org/10.3390/vibration6040062