
Aerial Surveillance Leveraging Delaunay Triangulation and Multiple-UAV Imaging Systems


Abstract
:1. Introduction
2. Materials and Methods
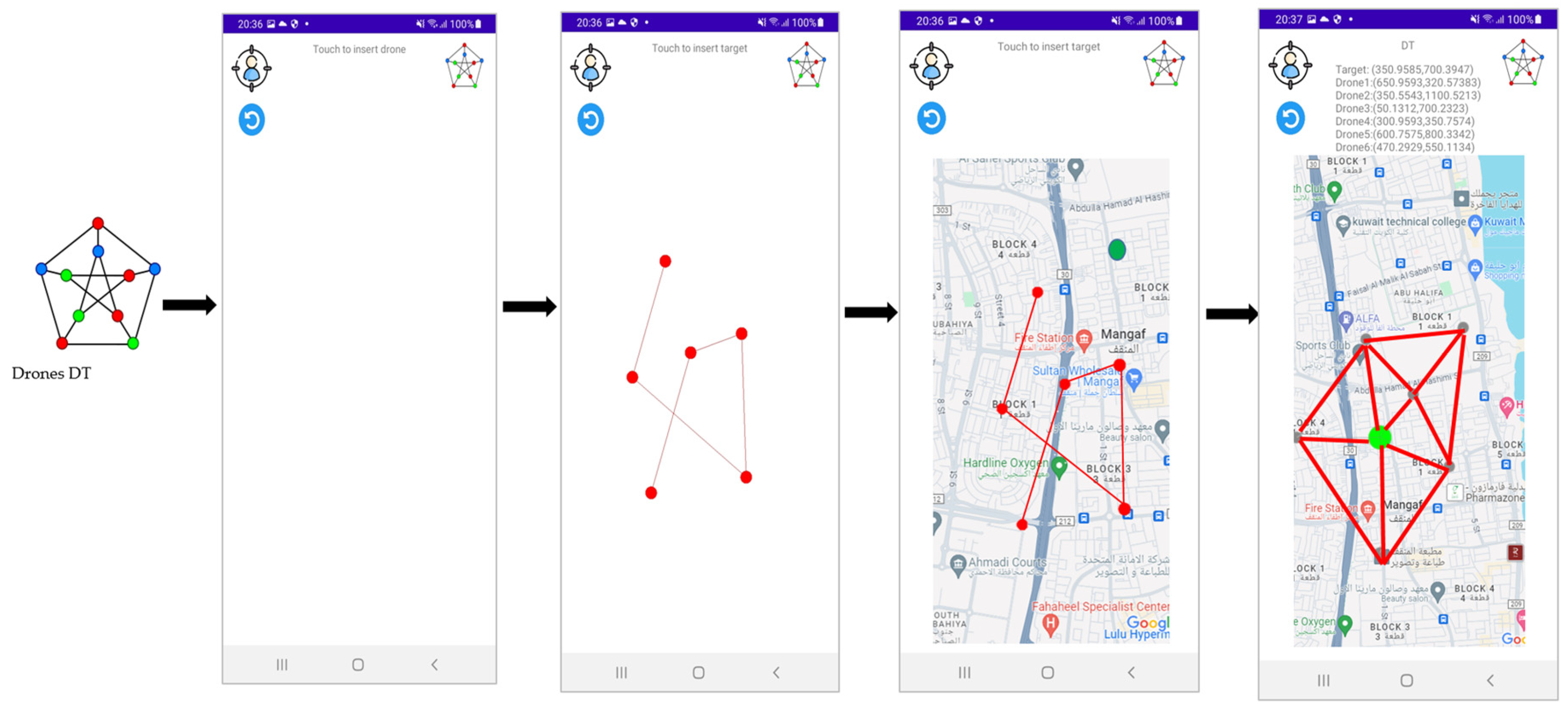
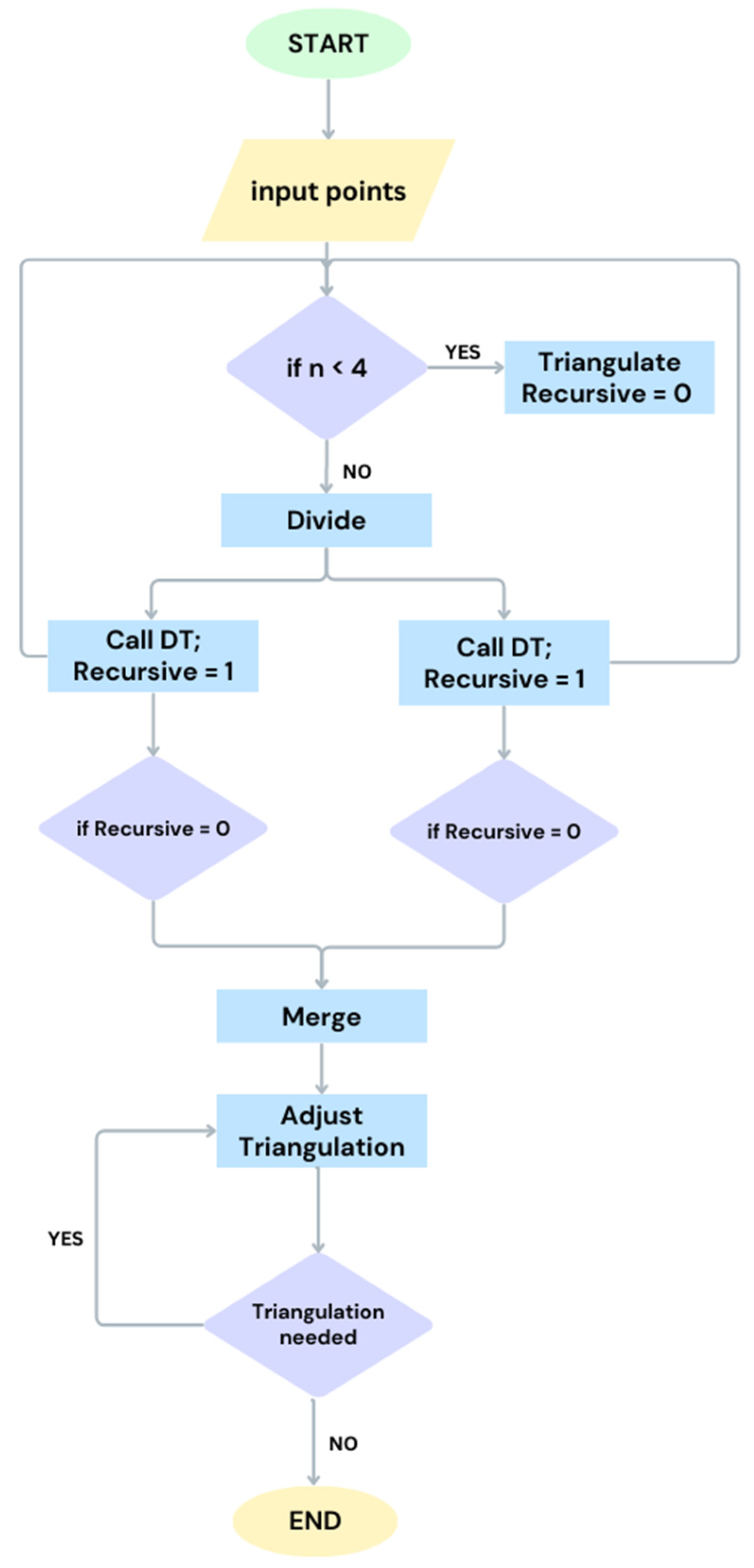
2.1. Delaunay Triangulation
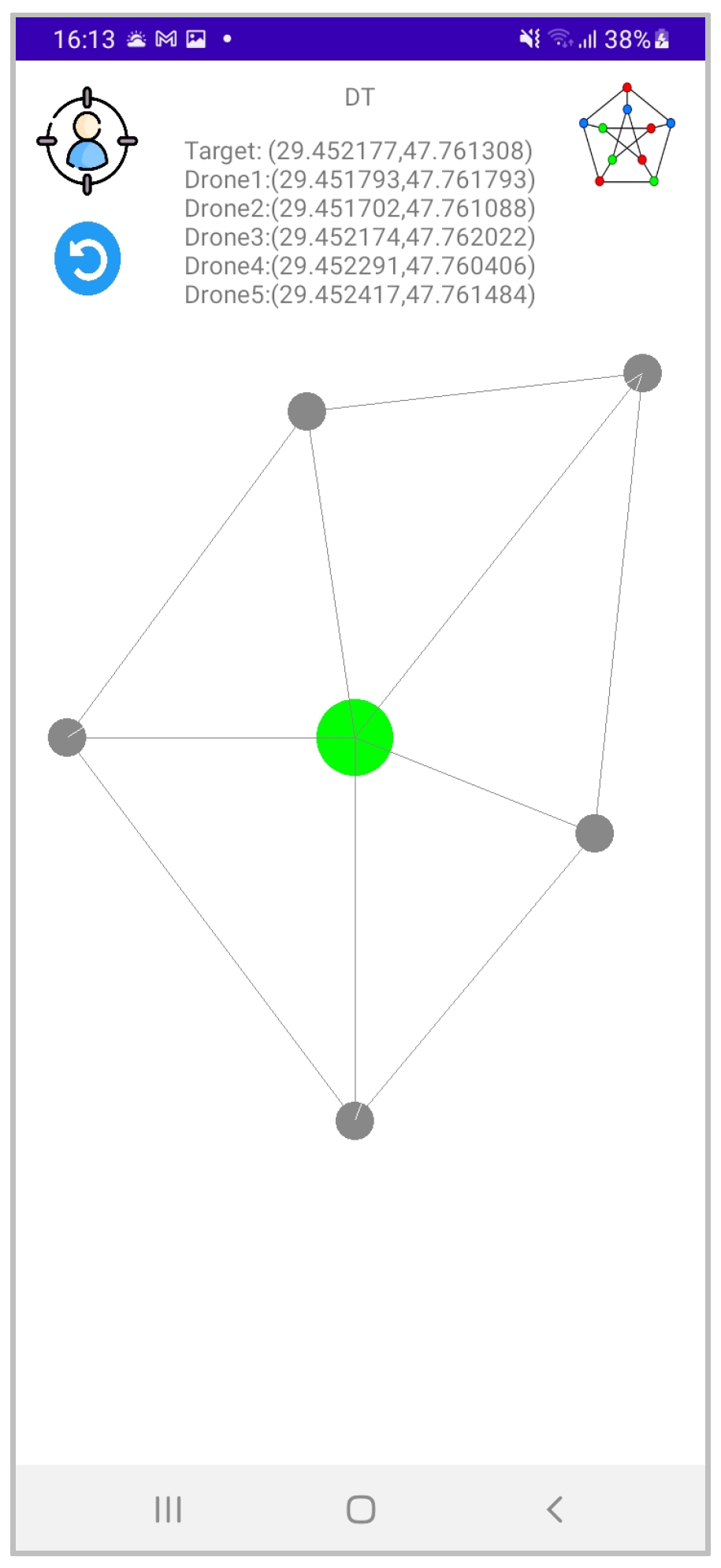
DT App
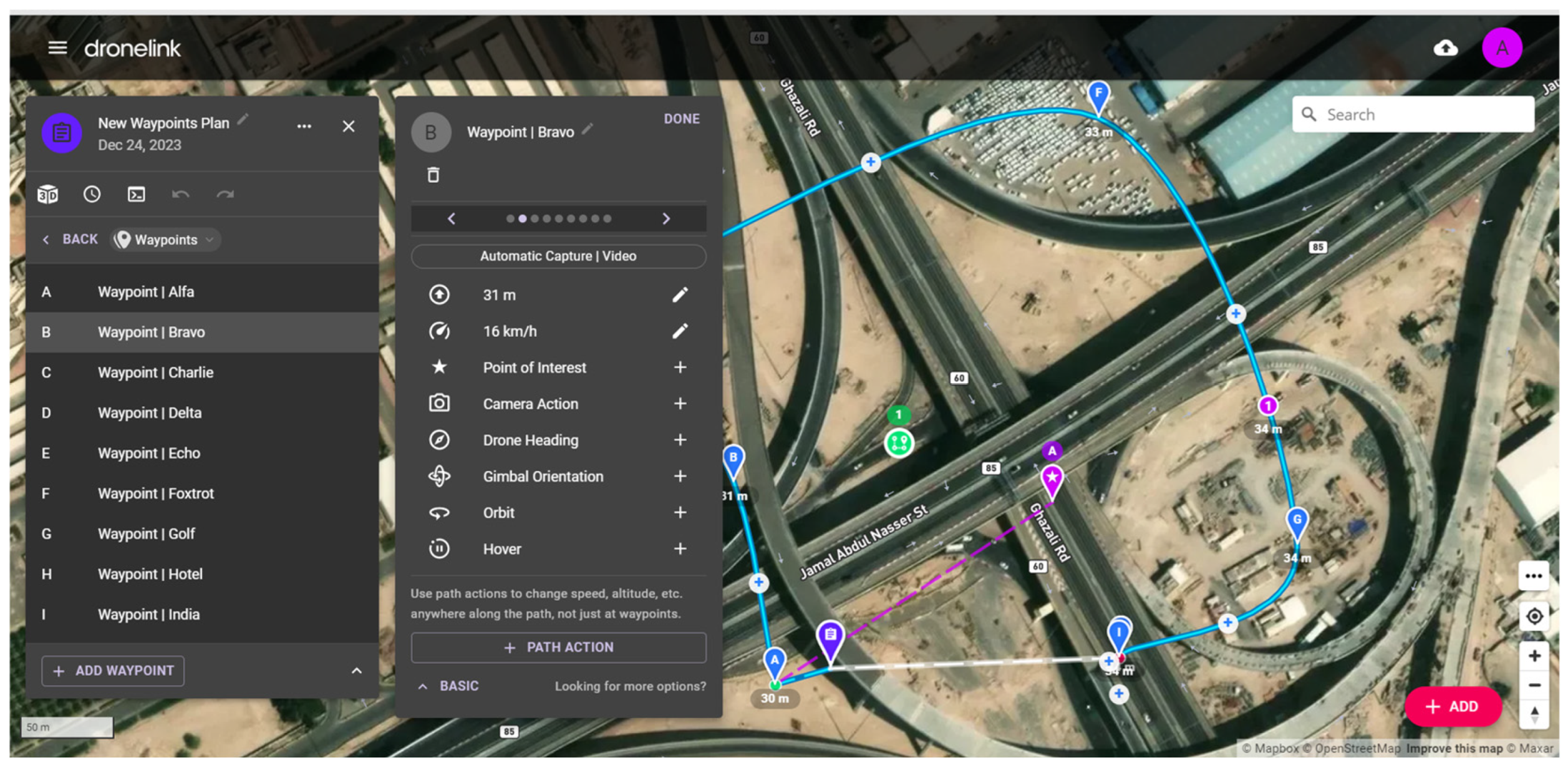
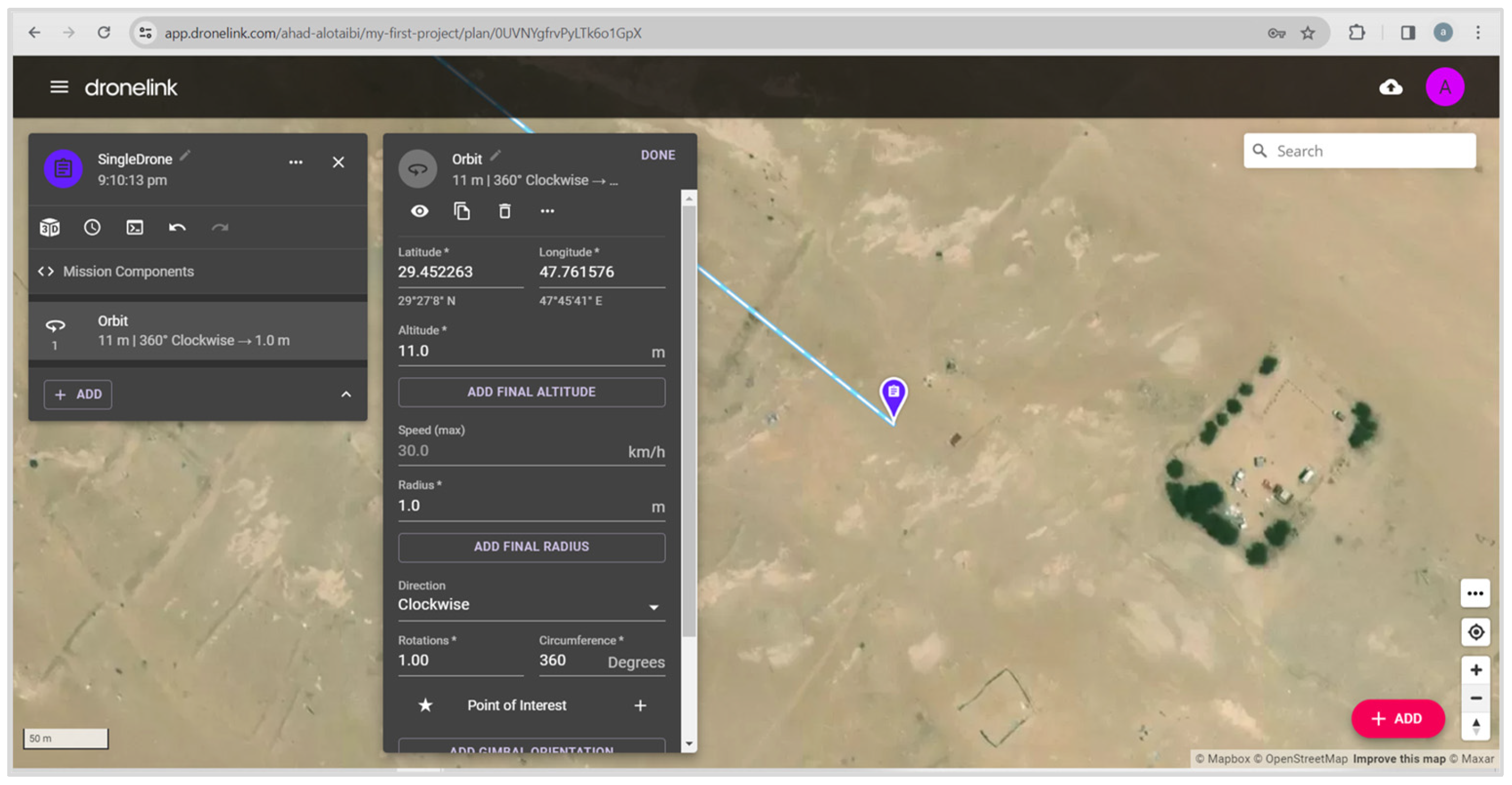
2.2. Dronelink
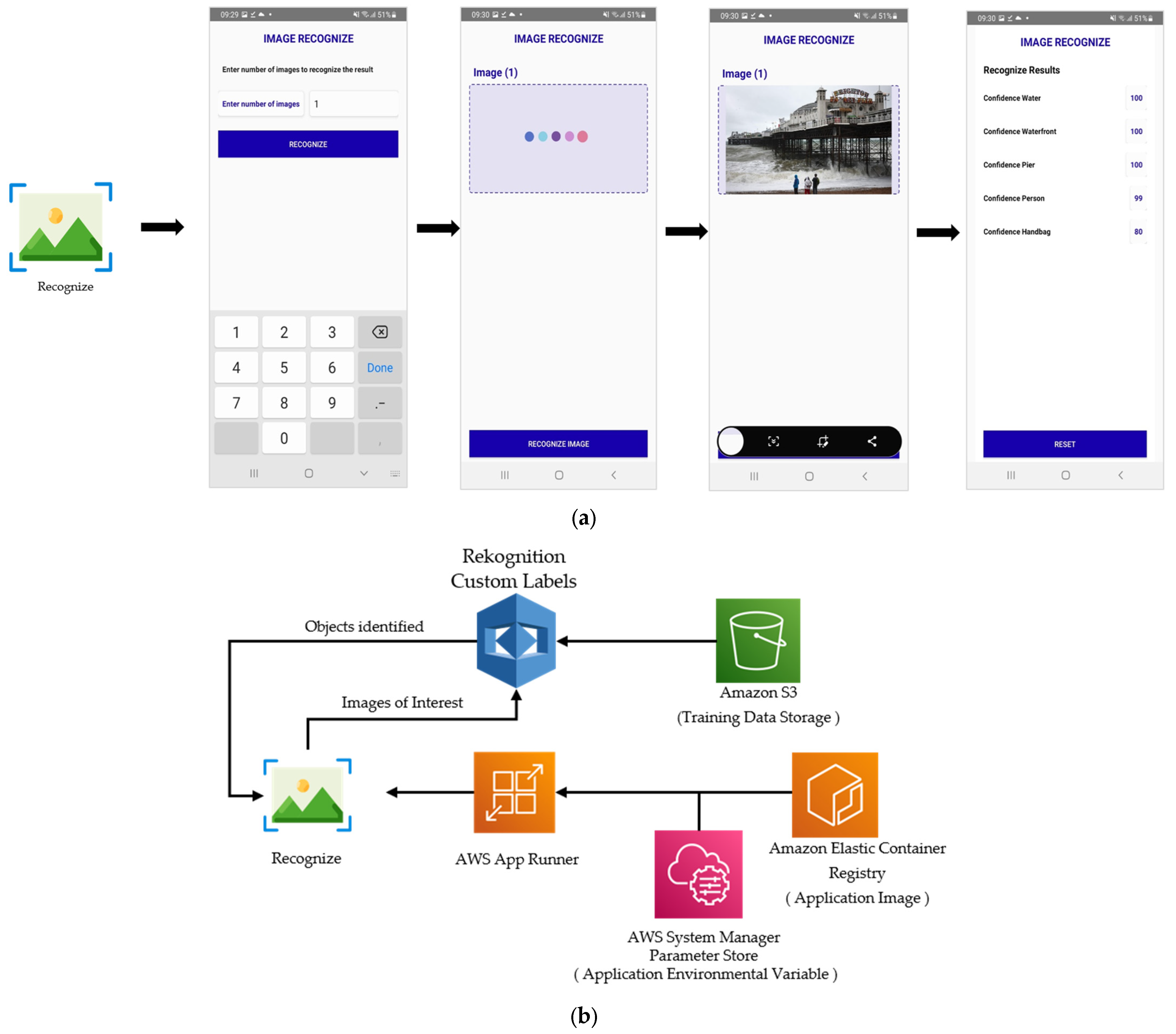
2.3. Image Processing
3. Results
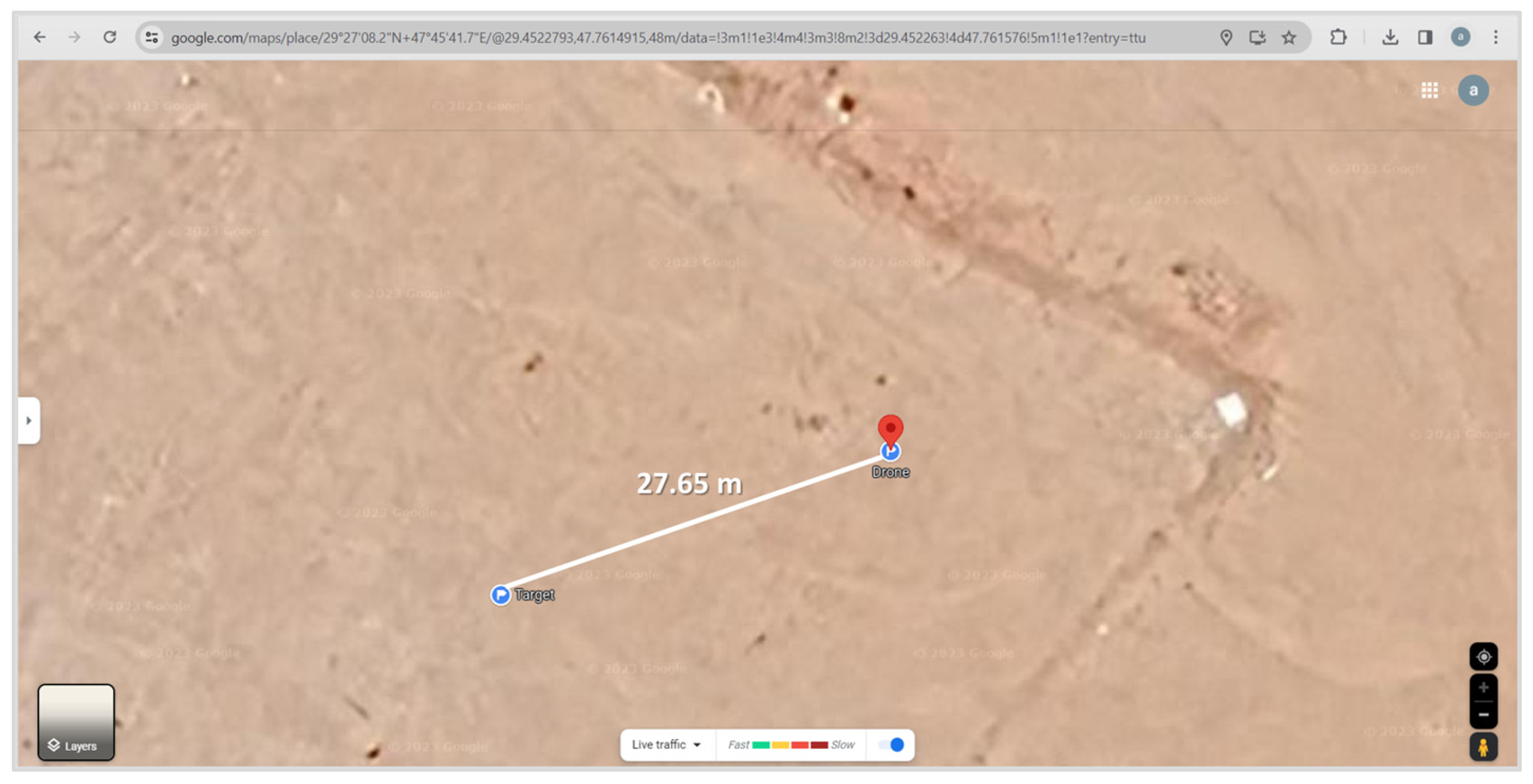
3.1. Single Drone for Aerial Surveillance
- Latitude: 29.452263;
- Longitude: 47.761576;
- Altitude: 11 m;
- Speed: 30 km/h;
- Radius: 1;
- Direction: Clockwise;
- Rotations: 1;
- Circumference: 360°;
- Automatic Capture: photos.
3.2. Multiple Drones for Aerial Surveillance
3.2.1. DT Drones Application
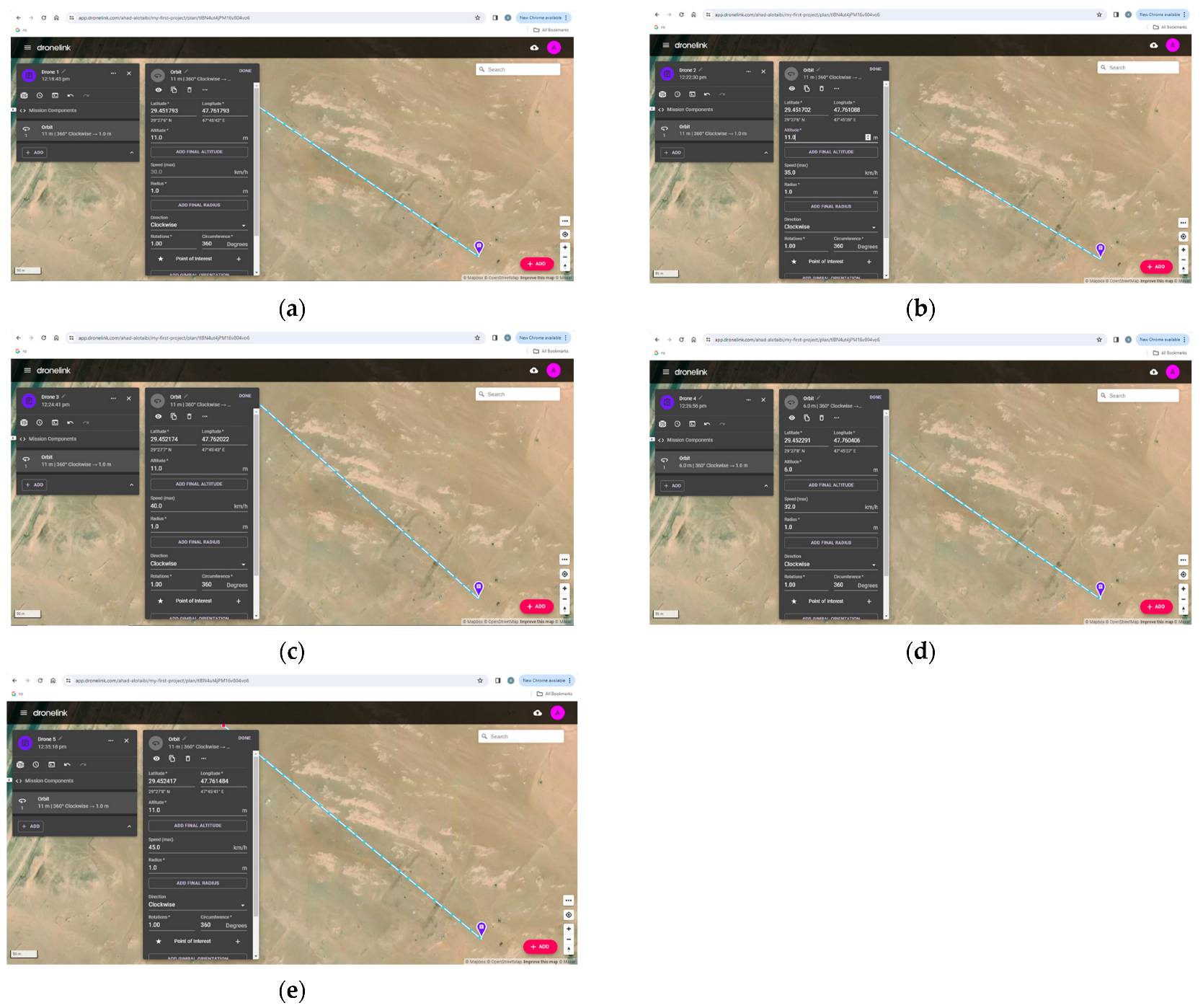
3.2.2. Dronelink Automatic Mission for Multiple Drones
3.2.3. Recognize Application for Images Taken from Multiple Drones
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B
- The population standard deviation is known:
- The population standard deviation is unknown:
- : The sample average.
- : The population standard deviation; typically, the population standard deviation is unknown and may be obtained from other research as a sample standard deviation with a larger sample size. In this scenario, it is permissible to assume it as the population standard deviation.
- S: The sample standard deviation.
- : The sample size (the number of observations).
- CL: confidence level.
- α = 1 − CL.
- —the z-score based on the standard normal distribution, p(z < ) = α/2.
- —the t-score based on the t distribution, p(t < ) = α/2.
- —degrees of freedom. = n − 1.
Appendix C
- : is the distance between the two points (along the surface of the sphere).
- : is the radius of the sphere (in this case, the radius of the Earth).
- 1: the latitude of the first point.
- 2: the latitude of the second point.
- : the difference between the latitudes.
- : the difference between the longitudes.
- : is a special function that computes the arctangent of the quotient of its arguments.
Appendix D

Appendix E

References
- Li, X.; Savkin, A.V. Networked unmanned aerial vehicles for surveillance and monitoring: A survey. Future Internet 2021, 13, 174. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Musin, O.R. Properties of the Delaunay triangulation. In Proceedings of the Thirteenth Annual Symposium on Computational geometry (SCG ’97). Association for Computing Machinery, New York, NY, USA, 4–6 June 1997; pp. 424–426. [Google Scholar] [CrossRef]
- Li, Q.; Nevalainen, P.; Peña Queralta, J.; Heikkonen, J.; Westerlund, T. Localization in Unstructured Environments: Towards Autonomous Robots in Forests with Delaunay Triangulation. Remote Sens. 2020, 12, 1870. [Google Scholar] [CrossRef]
- Srivastava, S.; Divekar, A.V.; Anilkumar, C.; Naik, I.; Kulkarni, V.; Pattabiraman, V. Comparative analysis of deep learning image detection algorithms. J. Big Data 2021, 8, 66. [Google Scholar] [CrossRef]
- Sharma, V.K.; Mir, R.N. A Comprehensive and Systematic Look up into Deep Learning Based Object Detection Techniques: A Review. Comput. Sci. Rev. 2020, 38, 100301. [Google Scholar] [CrossRef]
- Li, P.; Zhao, W. Image fire detection algorithms based on convolutional neural networks. Case Stud. Therm. Eng. 2020, 19, 100625. [Google Scholar] [CrossRef]
- Pi, Y.; Nath, N.D.; Behzadan, A.H. Convolutional neural networks for object detection in aerial imagery for disaster response and recovery. Adv. Eng. Inform. 2020, 43, 101009. [Google Scholar] [CrossRef]
- Doitsidis, L.; Weiss, S.; Renzaglia, A.; Achtelik, M.W.; Kosmatopoulos, E.; Siegwart, R.; Scaramuzza, D. Optimal surveillance coverage for teams of micro aerial vehicles in GPS-denied environments using onboard vision. Auton. Robot. 2012, 33, 173–188. [Google Scholar] [CrossRef]
- Beard, R.; McLain, T.; Nelson, D.; Kingston, D.; Johanson, D. Decentralized Cooperative Aerial Surveillance Using Fixed-Wing Miniature UAVs. Proc. IEEE 2006, 94, 1306–1324. [Google Scholar] [CrossRef]
- Pitre, R.R.; Li, X.R.; Delbalzo, R. UAV Route Planning for Joint Search and Track Missions—An Information-Value Approach. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2551–2565. [Google Scholar] [CrossRef]
- Nigam, N.; Bieniawski, S.; Kroo, I.; Vian, J. Control of Multiple UAVs for Persistent Surveillance: Algorithm and Flight Test Results. IEEE Trans. Control Syst. Technol. 2012, 20, 1236–1251. [Google Scholar] [CrossRef]
- Sharma, V. Object Detection and Recognition using Amazon Rekognition with Boto3. In Proceedings of the 2022 6th International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 28–30 April 2022; pp. 727–732. [Google Scholar] [CrossRef]
- Zahid, S.M.; Najesh, T.N.; K, S.; Ameen, S.R.; Ali, A. A Multi Stage Approach for Object and Face Detection using CNN. In Proceedings of the 2023 8th International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 1–3 June 2023; pp. 798–803. [Google Scholar] [CrossRef]
- Vavilov, N.A. Saint Petersburg School of the Theory of Linear Groups. I. Prehistory. Vestn. St. Petersburg Univ. Math. 2023, 56, 273–288. [Google Scholar] [CrossRef]
- Guibas, L.; Stolfi, J. Primitives for the manipulation of general subdivisions and the computation of Voronoi. ACM Trans. Graph. 1985, 4, 74–123. [Google Scholar] [CrossRef]
- Dwyer, R.A. A faster divide-and-conquer algorithm for constructing delaunay triangulations. Algorithmica 1987, 2, 137–151. [Google Scholar] [CrossRef]
- Prill, F.; Zängl, G. A compact parallel algorithm for spherical Delaunay triangulations. Concurr. Comput. Pract. Exp. 2017, 29, e3971. [Google Scholar] [CrossRef]
- Kamarudin, K.R.; Wei, Y.J. Production of drone orthomosaic map of UTHM Wetland Conservation Research Station using UAV photogrammetry. IOP Conf. Ser. Earth Environ. Sci. 2022, 1064, 012012. [Google Scholar] [CrossRef]
- dos Santos Boente, A.; de Oliveira, T.E.A.; Baldivieso, T.J.; da Fonseca, V.P.; Rosa, P.F. Small Scale Unmanned Aircraft System and Photogrammetry Applied for 3D Modeling of Historical Buildings. In Proceedings of the Twelfth International Conference on Sensor Device Technologies and Applications SENSORDEVICES, Athens, Greece, 14–18 November 2021. [Google Scholar]
- Kovasznay, L.S.G.; Joseph, H.M. Image Processing. Proc. IRE 1955, 43, 560–570. [Google Scholar] [CrossRef]
- Egmont-Petersen, M.; de Ridder, D.; Handels, H. Image processing with neural networks—A review. Pattern Recognit. 2002, 35, 2279–2301. [Google Scholar] [CrossRef]
- Wu, M.; Chen, L. Image recognition based on deep learning. In Proceedings of the 2015 Chinese Automation Congress (CAC), Wuhan, China, 27–29 November 2015; pp. 542–546. [Google Scholar] [CrossRef]
- Shin, H.-C.; Roth, H.R.; Gao, M.; Lu, L.; Xu, Z.; Nogues, I.; Yao, J.; Mollura, D.; Summers, R.M. Deep Convolutional Neural Networks for Computer-Aided Detection: CNN Architectures, Dataset Characteristics and Transfer Learning. IEEE Trans. Med. Imaging 2016, 35, 1285–1298. [Google Scholar] [CrossRef]
- Prewitt, J.M.S. Object enhancement and extraction. Pict. Process. Psychopictorics 1970, 10, 15–19. [Google Scholar]
- Leibe, B.; Leonardis, A.; Schiele, B. Robust object detection with interleaved categorization and segmentation. Int. J. Comput. Vis. 2008, 77, 259–289. [Google Scholar] [CrossRef]
- Paola, P.; Concetti, R.; Belli, A.; Palma, L. Amazon, Google and Microsoft solutions for IoT: Architectures and a performance comparison. IEEE Access 2019, 8, 5455–5470. [Google Scholar]
- Winarno, E.; Hadikurniawati, W.; Rosso, R.N. Location based service for presence system using haversine method. In Proceedings of the 2017 International Conference on Innovative and Creative Information Technology (ICITech), Salatiga, Indonesia, 2–4 November 2017; pp. 1–4. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Recognize Results | Confidence Level |
|---|---|
| Car | 97 |
| Pickup Truck | 97 |
| Person | 95 |
| Outdoors | 87 |
| Wheel | 77 |
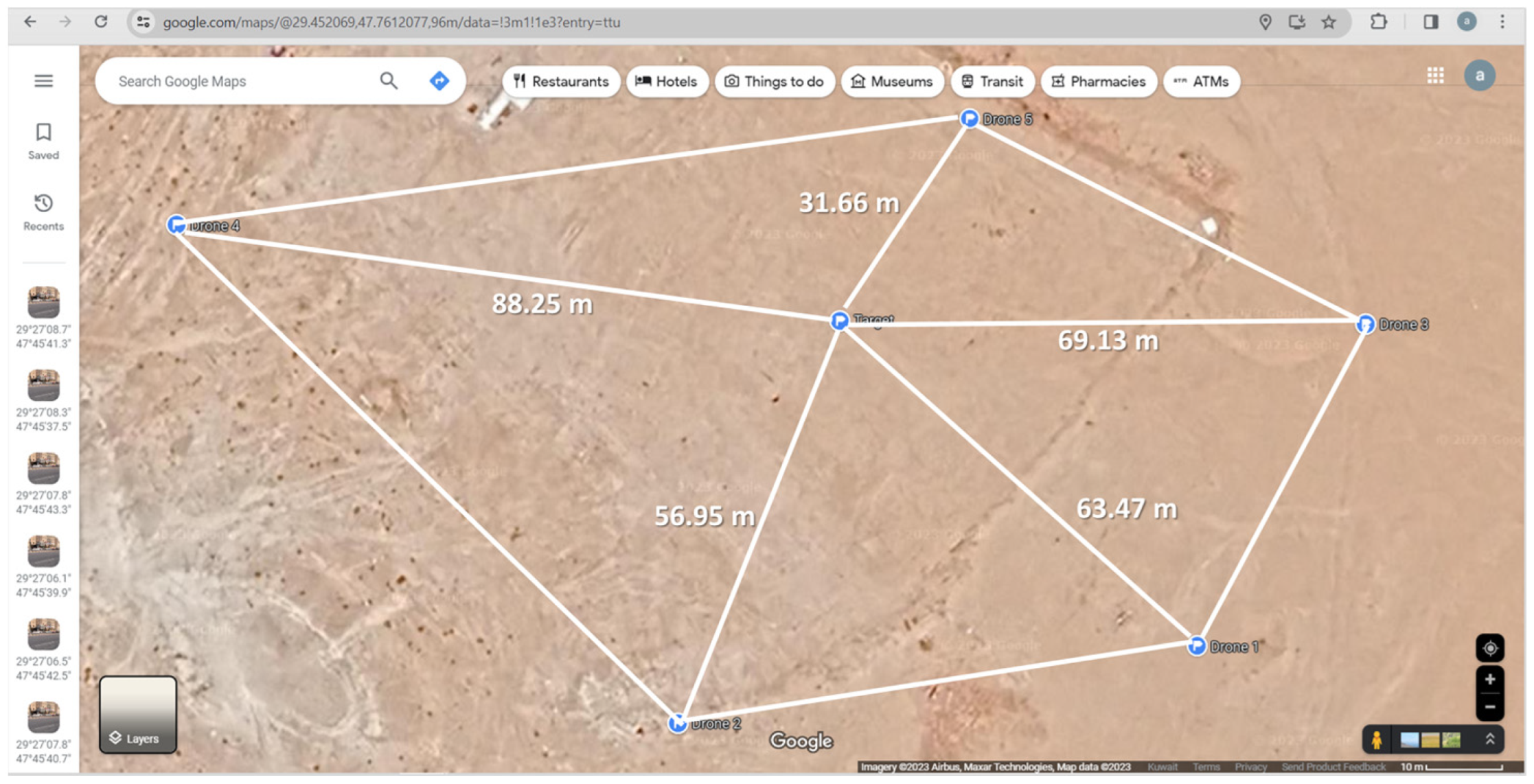
| Coordinates | Longitude (°) | Latitude (°) | Distance to Target (m) |
|---|---|---|---|
| Drone 1 | 29.451793 | 47.761793 | 63.47 |
| Drone 2 | 29.451702 | 47.761088 | 56.95 |
| Drone 3 | 29.452174 | 47.762022 | 69.13 |
| Drone 4 | 29.452291 | 47.760406 | 88.25 |
| Drone 5 | 29.452417 | 47.761484 | 31.66 |
| Property | Drone 1 | Drone 2 | Drone 3 | Drone 4 | Drone 5 |
|---|---|---|---|---|---|
| Longitude (°) | 29.451793 | 29.451702 | 29.452174 | 29.452291 | 29.452417 |
| Latitude (°) | 47.761793 | 47.761088 | 47.762022 | 47.760406 | 47.761484 |
| Altitude (m) | 11 | 11 | 11 | 6 | 11 |
| Speed (km/h) | 30 | 35 | 40 | 32 | 45 |
| Radius (m) | 1 | 1 | 1 | 1 | 1 |
| Direction | Clockwise | Clockwise | Clockwise | Clockwise | Clockwise |
| Number of Rotations | 0 | 0 | 0 | 0 | 0 |
| Circumference | 360° | 360° | 360° | 360° | 360° |
| Automatic Capture | photos | photos | photos | photos | photos |
| Recognize Results | Confidence Level |
|---|---|
| Car | 98 |
| Pickup Truck | 100 |
| Person | 100 |
| Outdoors | 100 |
| Wheel | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alotaibi, A.; Chatwin, C.; Birch, P. Aerial Surveillance Leveraging Delaunay Triangulation and Multiple-UAV Imaging Systems. Appl. Syst. Innov. 2024, 7, 23. https://doi.org/10.3390/asi7020023
Alotaibi A, Chatwin C, Birch P. Aerial Surveillance Leveraging Delaunay Triangulation and Multiple-UAV Imaging Systems. Applied System Innovation. 2024; 7(2):23. https://doi.org/10.3390/asi7020023
Chicago/Turabian StyleAlotaibi, Ahad, Chris Chatwin, and Phil Birch. 2024. "Aerial Surveillance Leveraging Delaunay Triangulation and Multiple-UAV Imaging Systems" Applied System Innovation 7, no. 2: 23. https://doi.org/10.3390/asi7020023