
Implementation and Investigation of an Advanced Induction Machine Field-Oriented Control Strategy Using a New Generation of Inverters Based on dSPACE Hardware
Abstract
:1. Introduction
2. Principle of the Conventional and Improved FOC Strategy
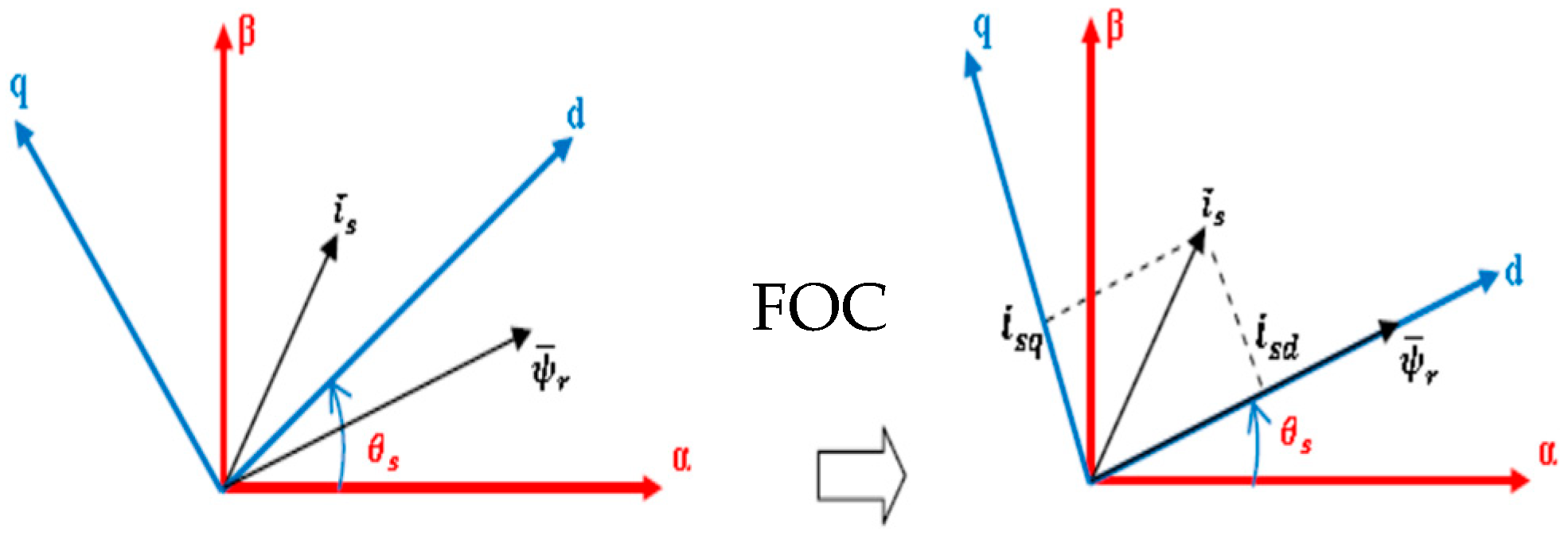
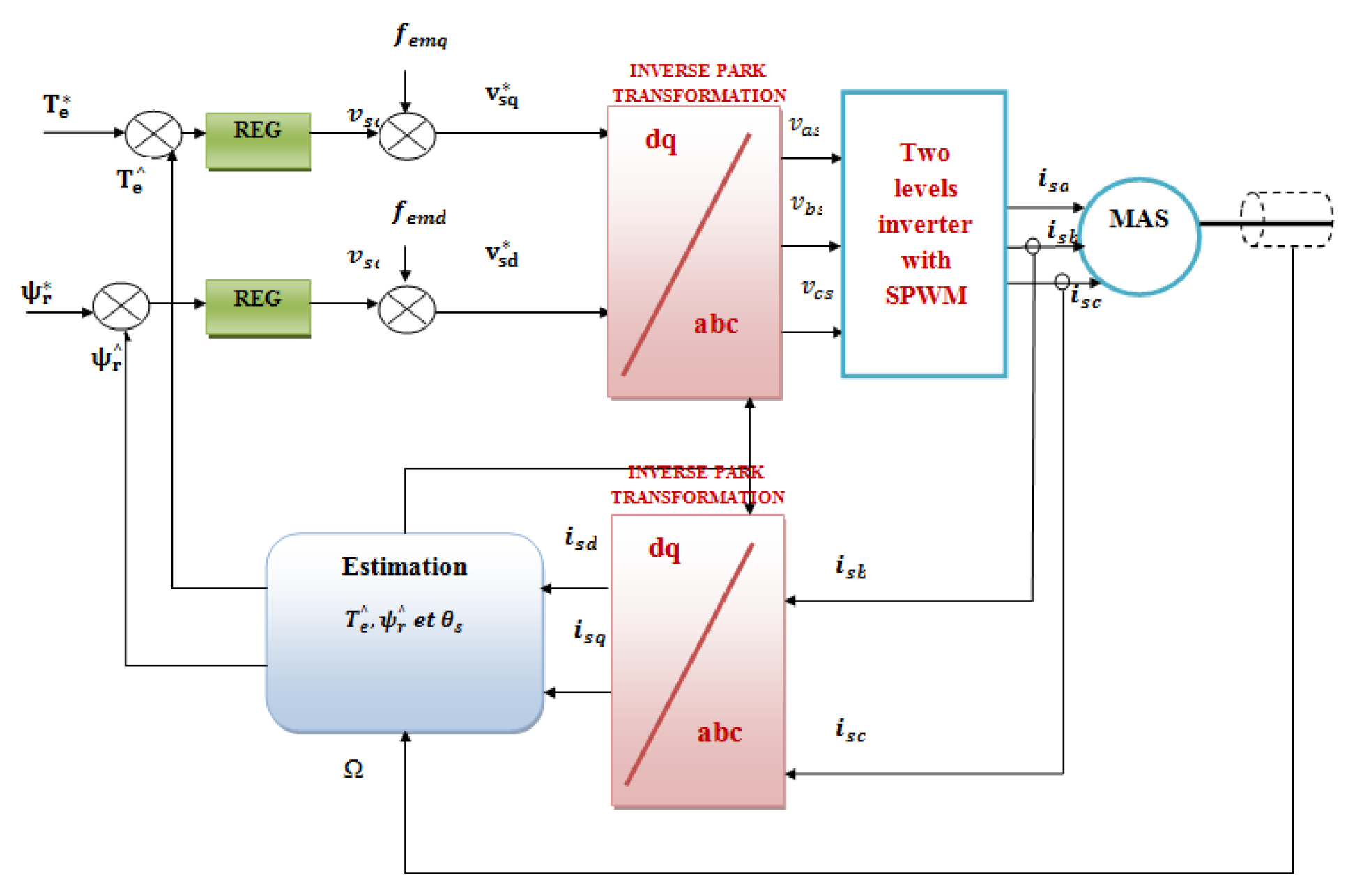
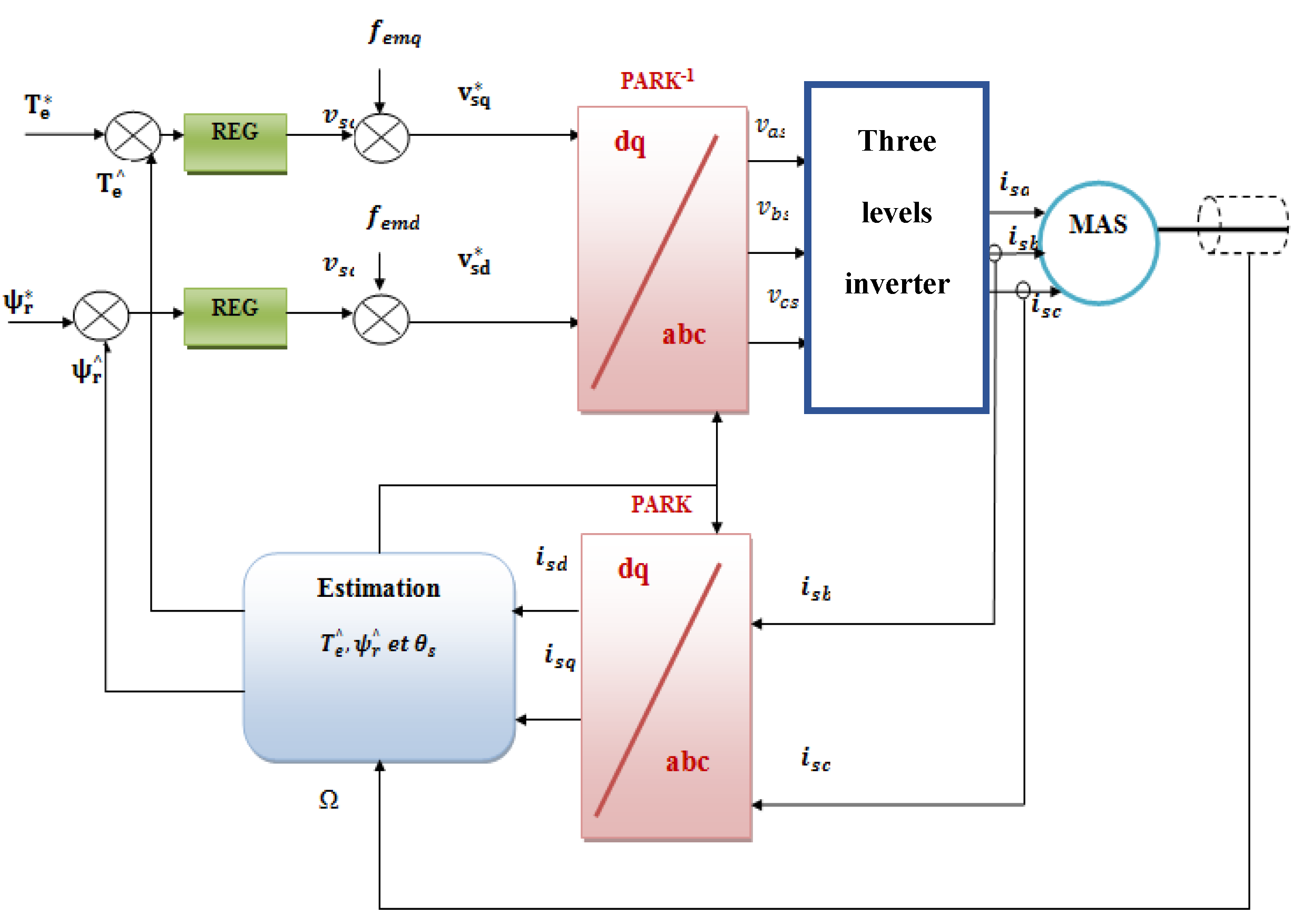
2.1. Principle of the Conventional FOC Strategy
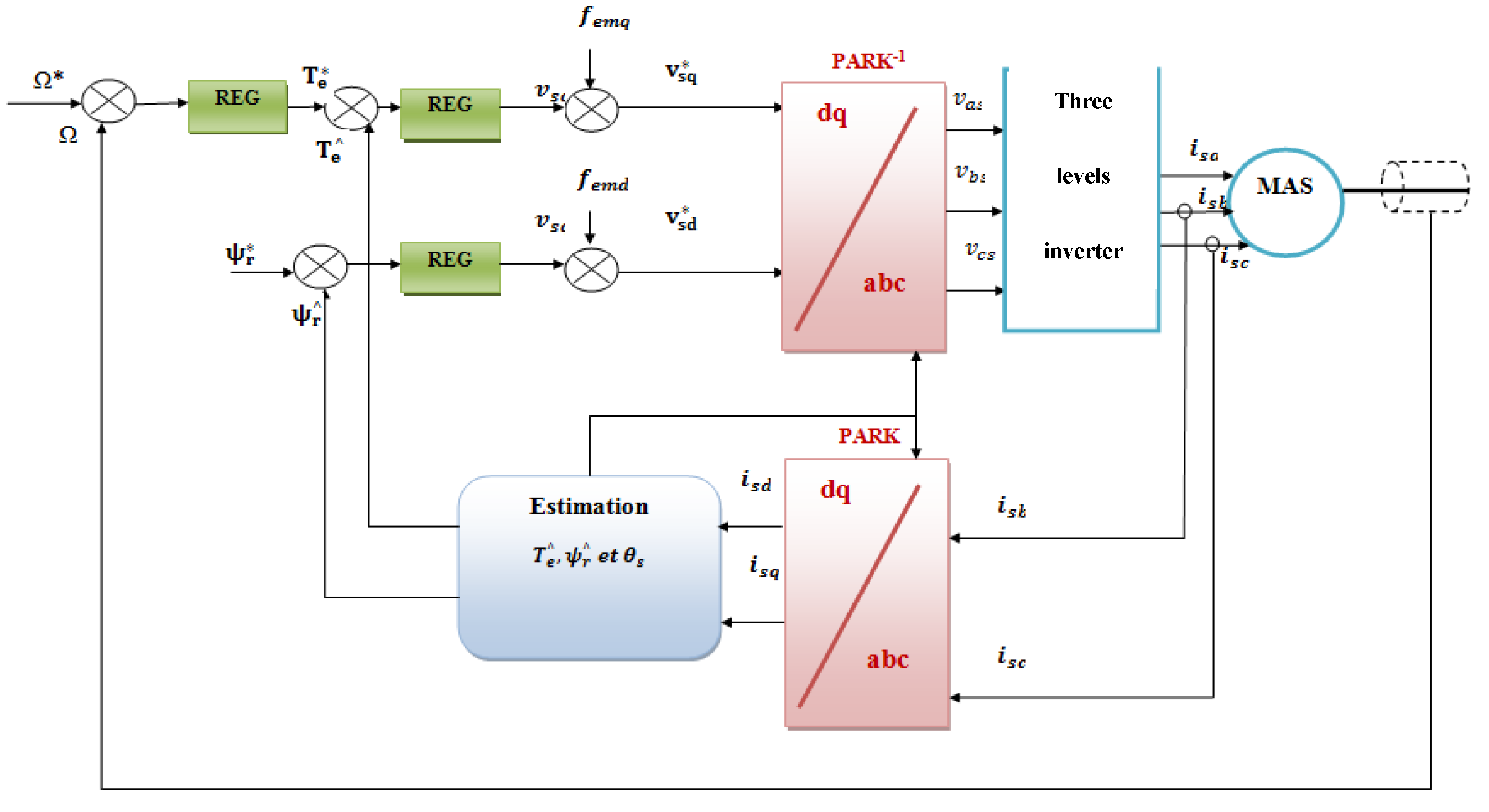
2.2. Principle of the Improved FOC Strategy
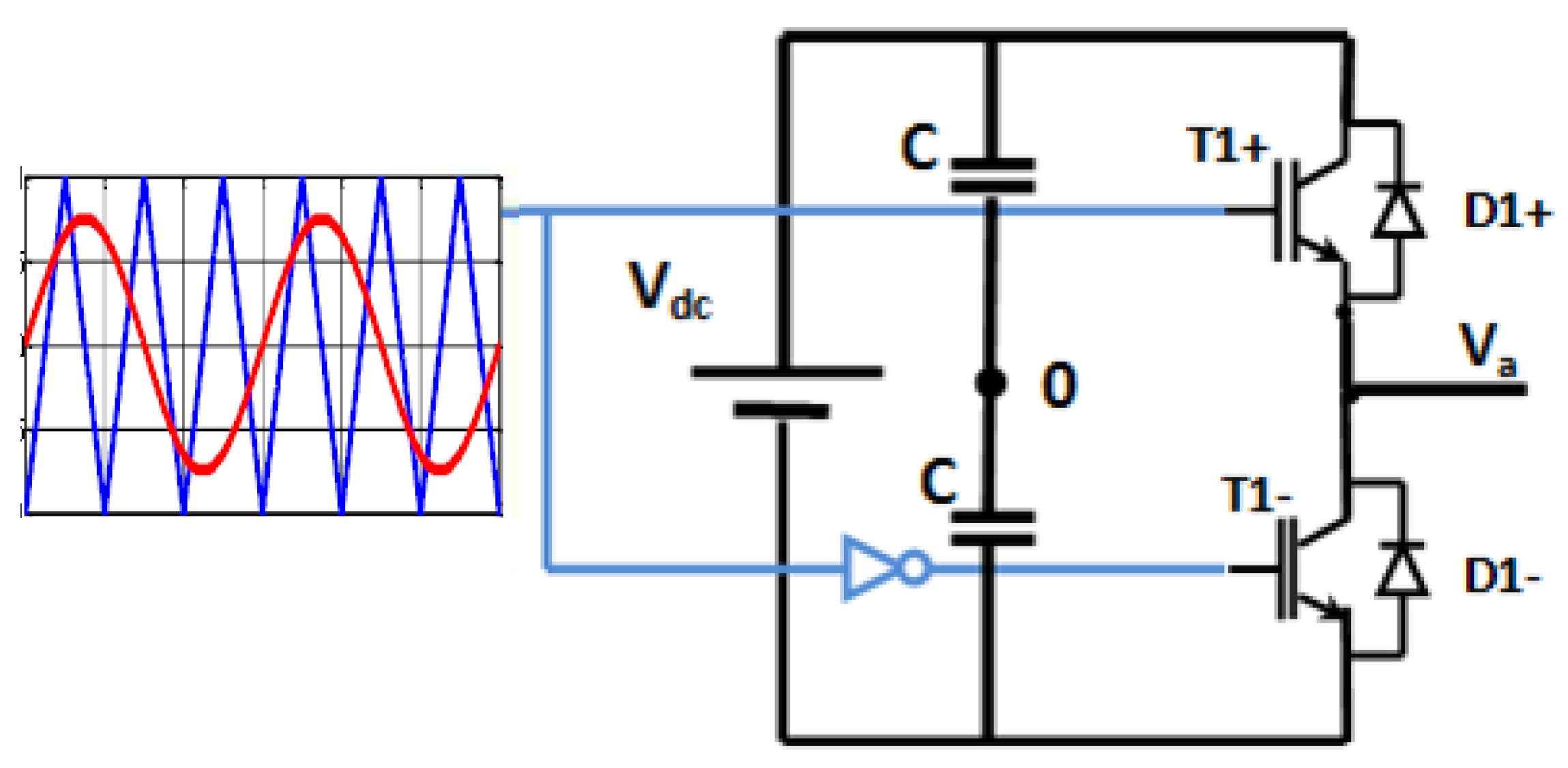
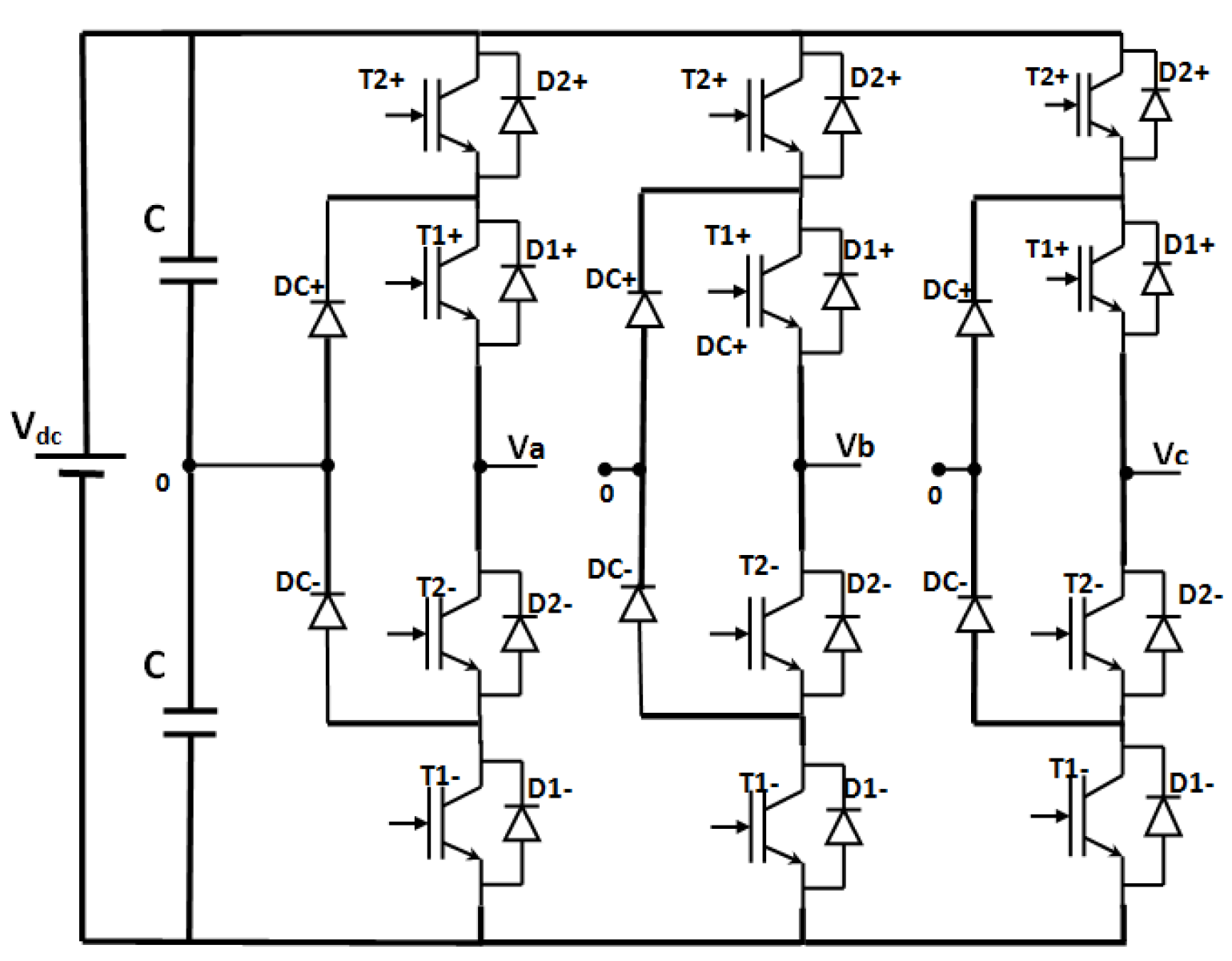
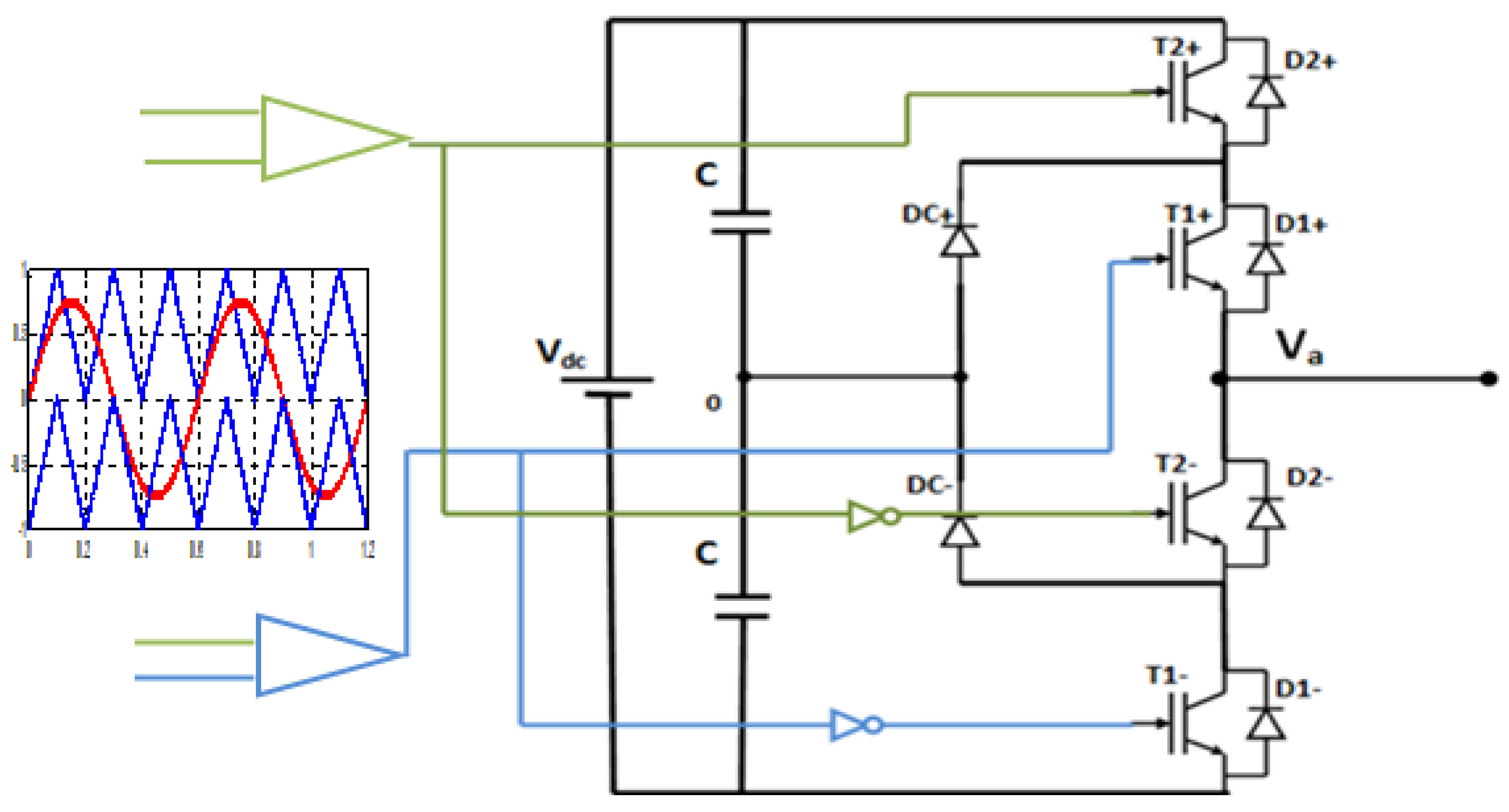
2.2.1. Principle of 3L_NPC Inverter
2.2.2. Amelioration of FOC Strategy Using 3L_NPC Inverter
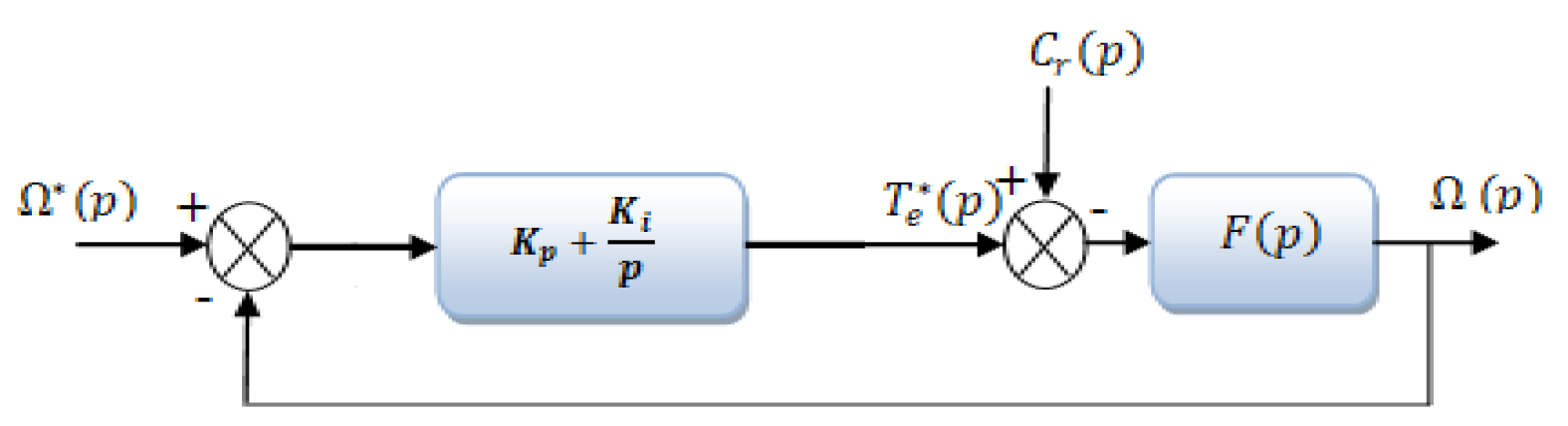
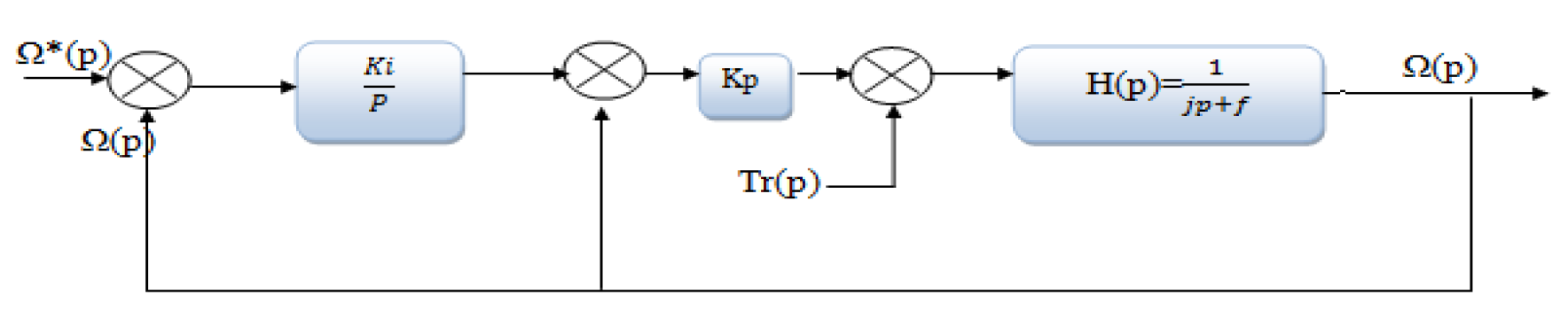
2.2.3. Closed Loop Conditions
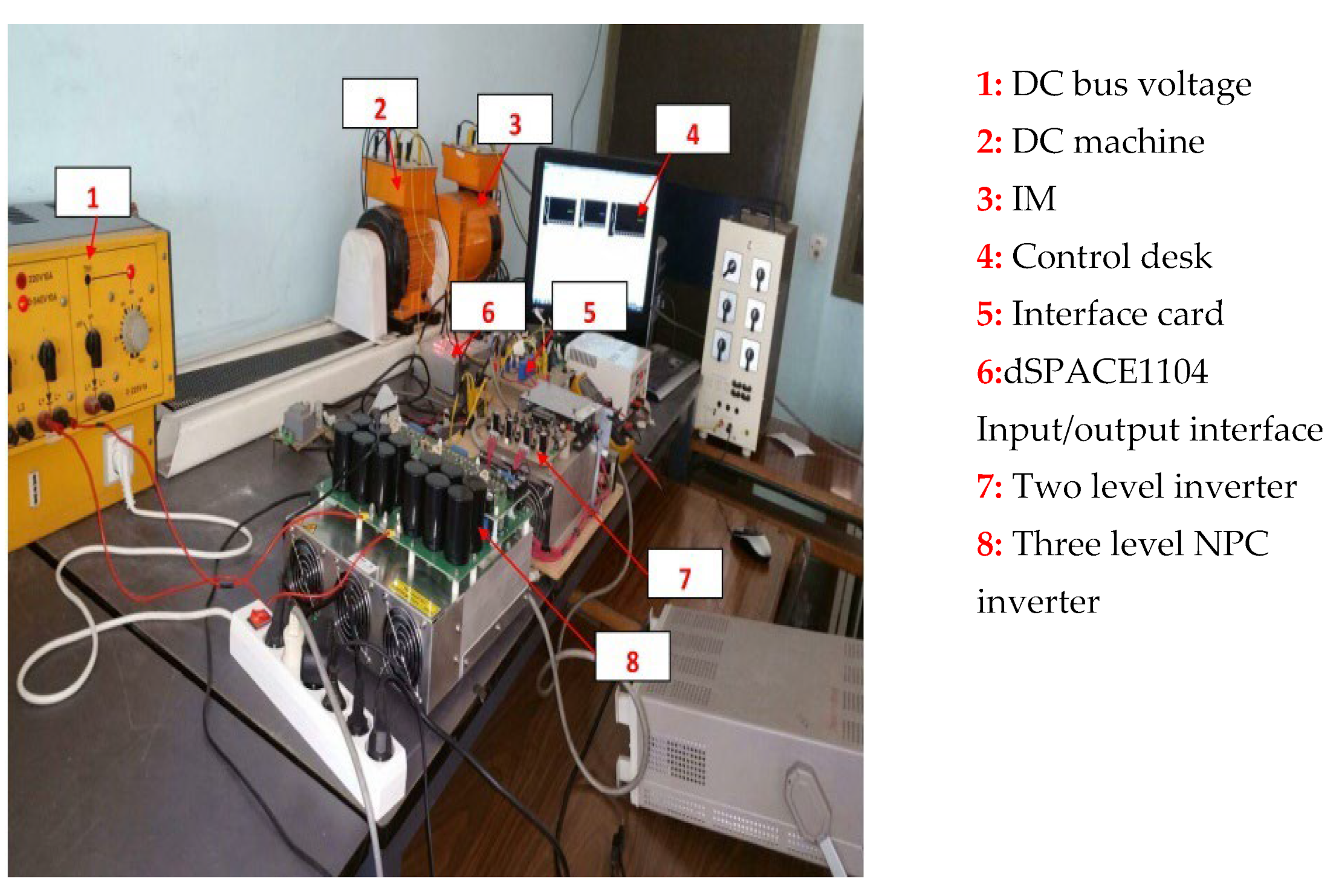
3. Experimental Results
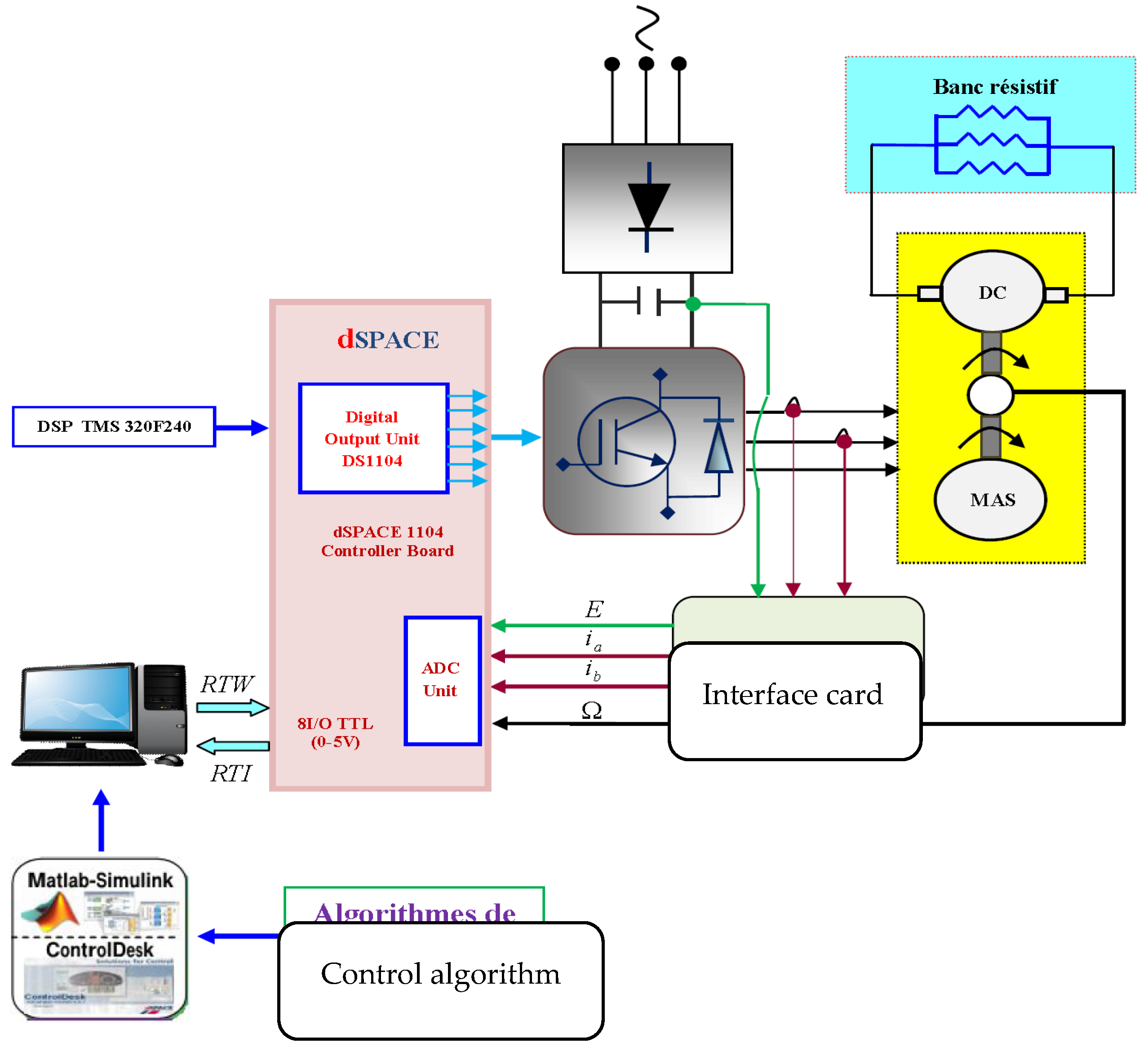
Presentation of the Experimental Platform
4. Experimental Results and Discussion
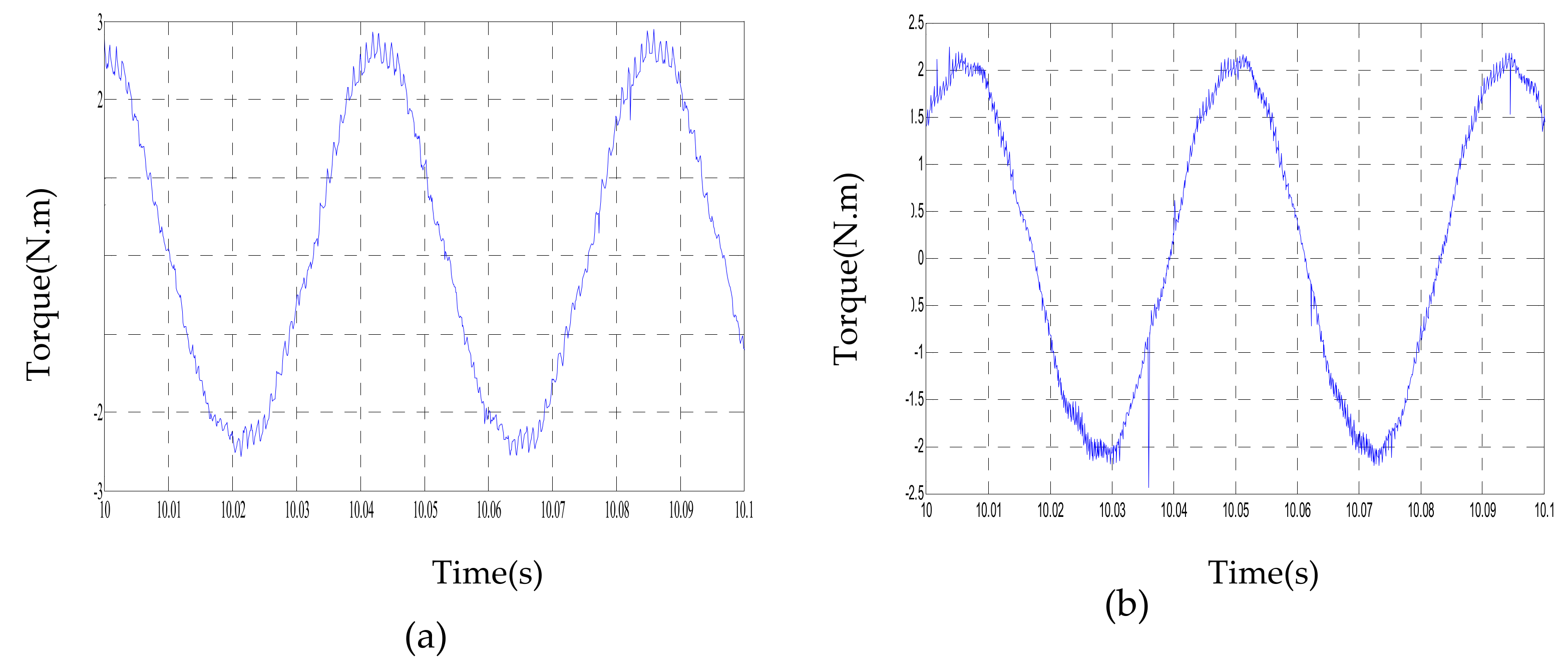
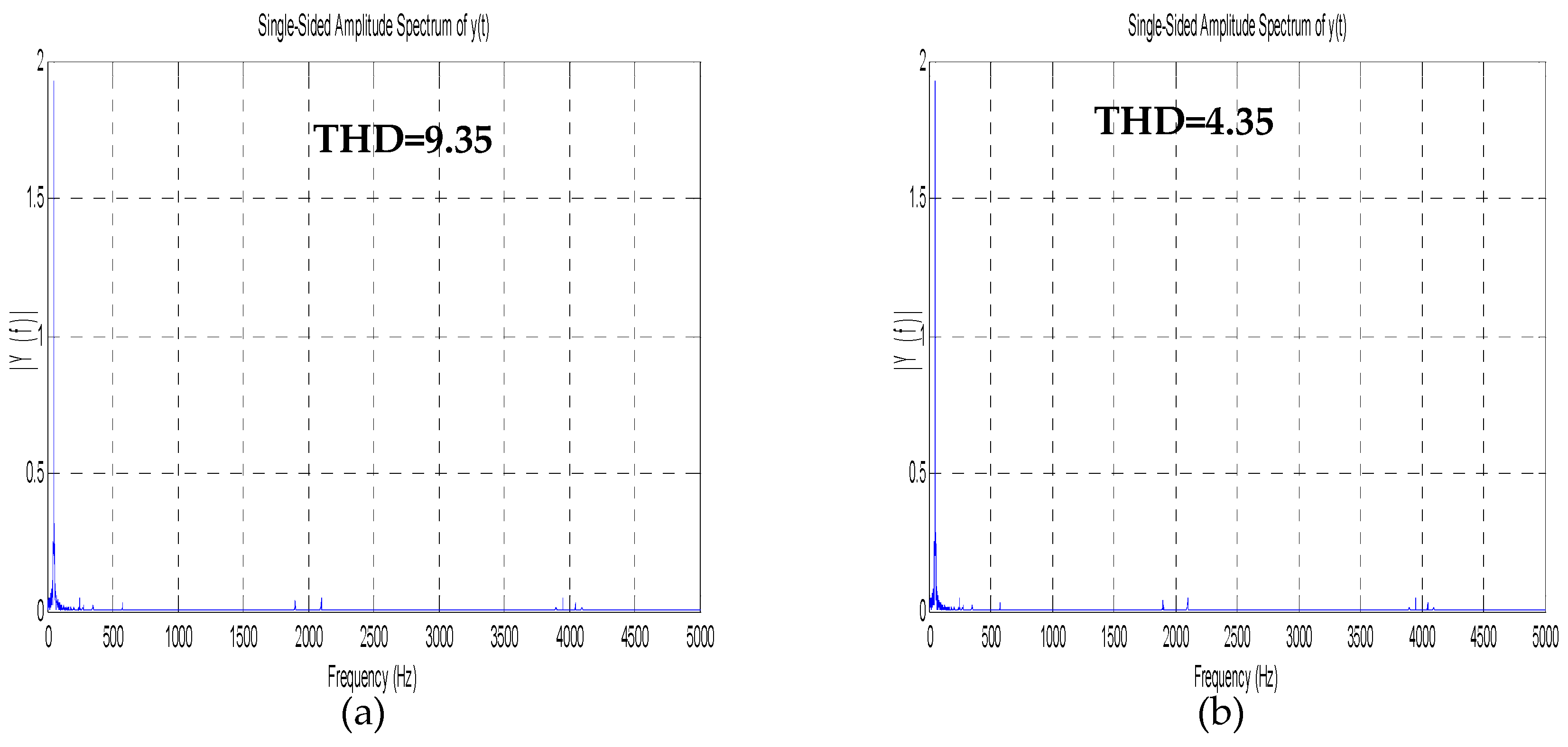
4.1. Open Loop Conditions
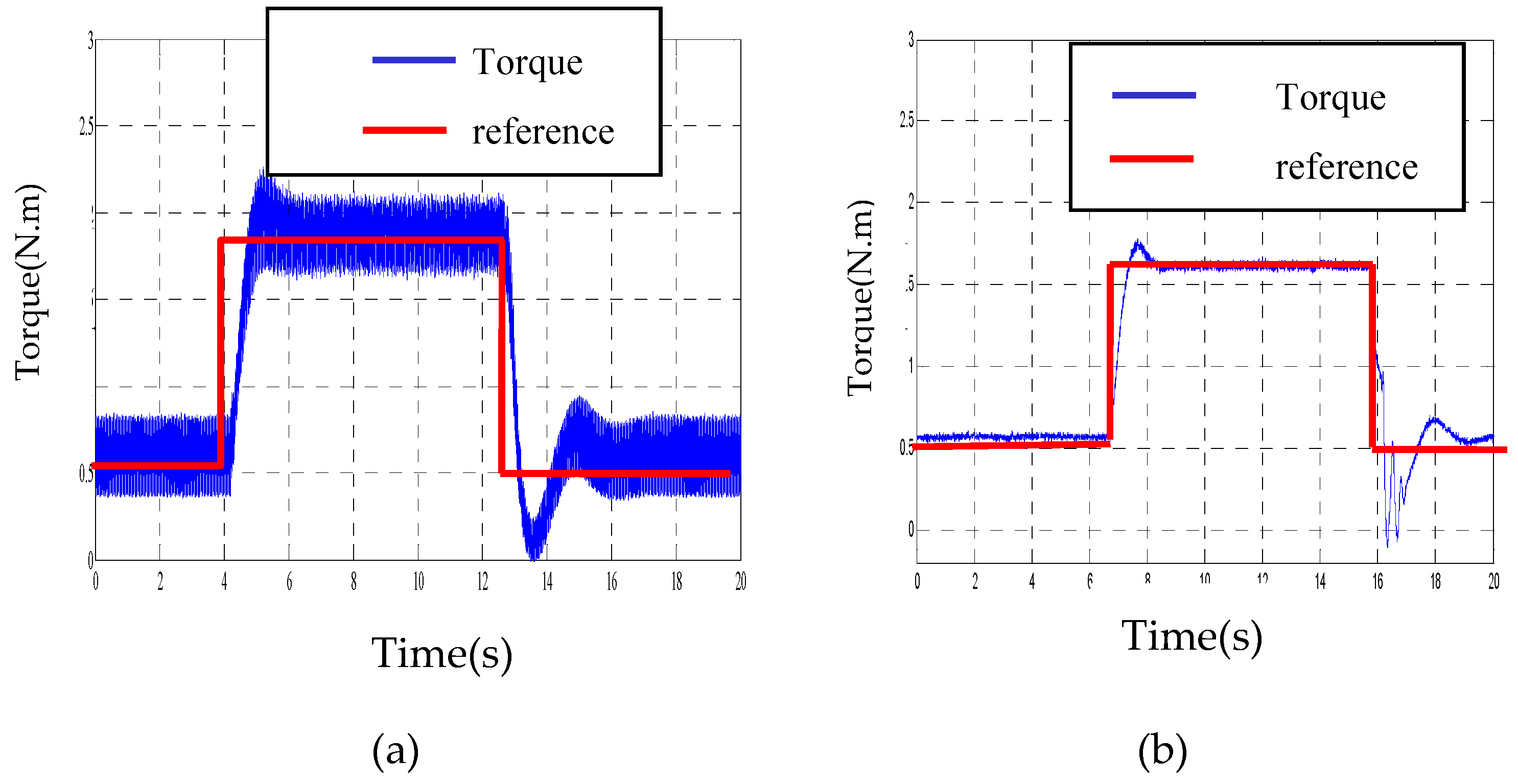
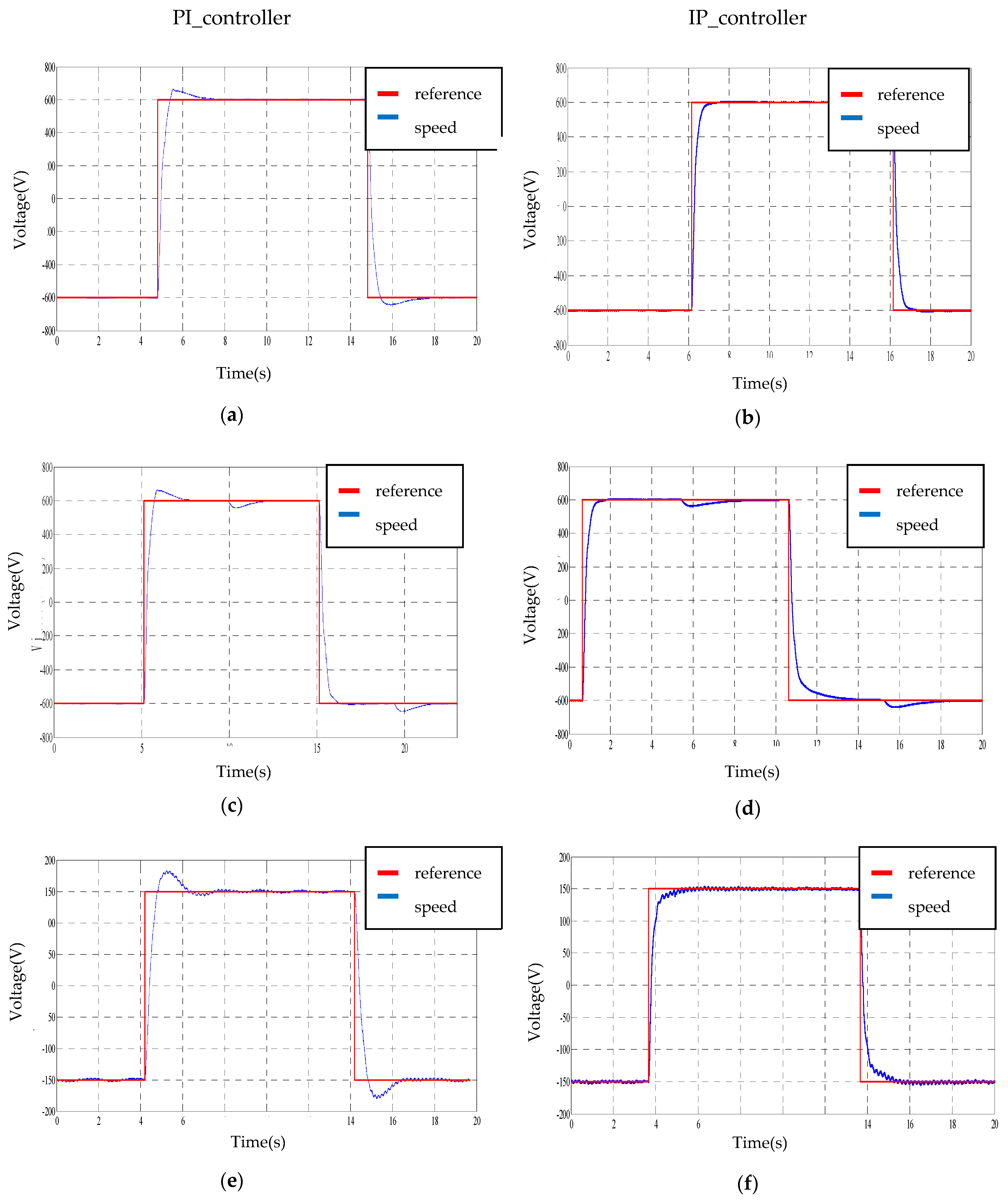
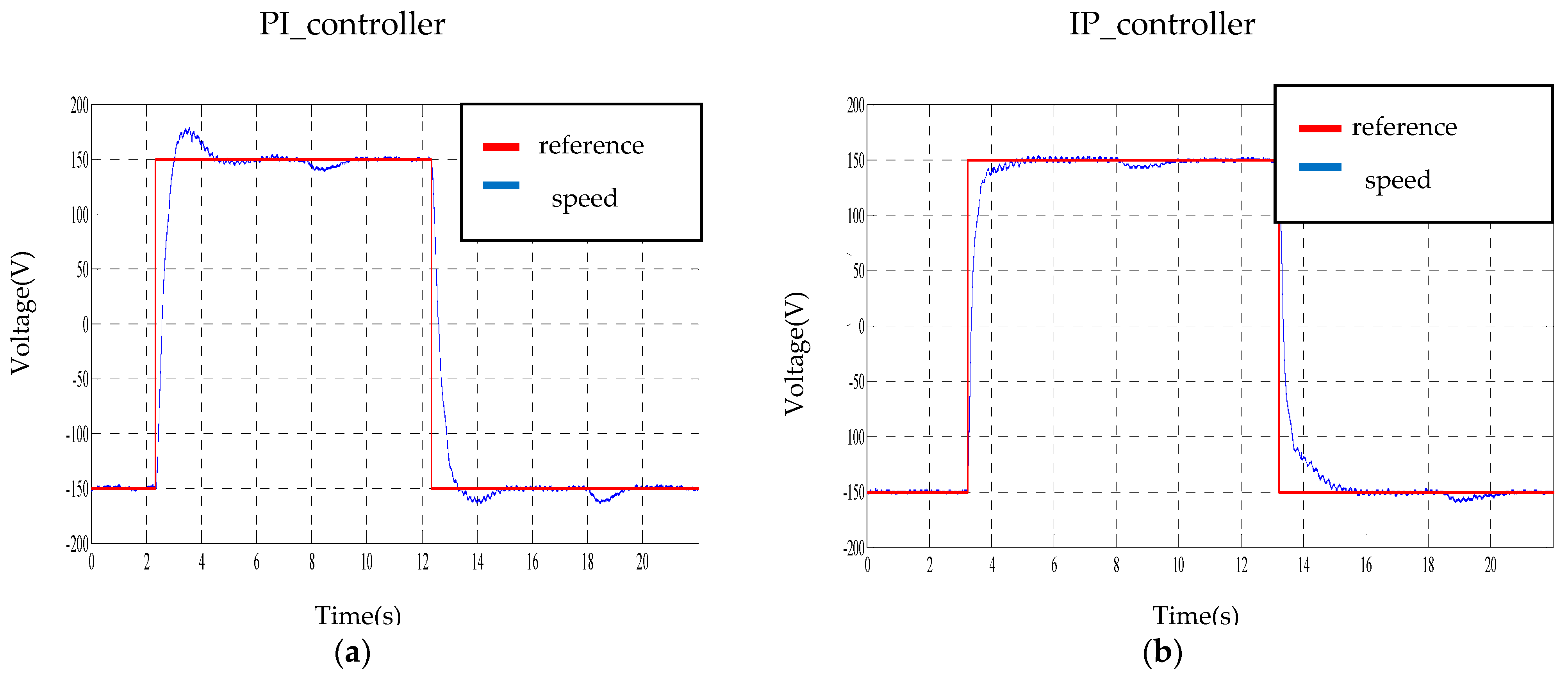
4.2. Closed Loop Conditions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hill, N. Methodology Paper for Emission Factors Final. In E.K. 2019 Government Greenhouse Gas Conversion Factors for Company Reporting; Government UK: London, UK, 2019. [Google Scholar]
- Abouzeid, A.F.; Guerrero, J.M.; Endemaño, A.; Muniategui, I.; Ortega, O.; Larrazabal, I.; Briz, F. Review Control Strategies for Induction Motors in Railway. Energies 2020, 13, 700. [Google Scholar] [CrossRef] [Green Version]
- Zhongbei, T.; Ning, Z.; Hillmansen, S.; Roberts, C.; Dowens, T.; Kerr, C. Smart drive: Traction energy optimisation in railway system. IEEE Trans. Intell. Transp. Syst. 2019, 20, 7. [Google Scholar]
- He, X.; Peng, J.; Han, P.; Liu, Z.; Gao, S.; Wang, P. A Novel Advanced Traction Power Supply System Based on Modular Multilevel Converter. IEEE Access 2019, 7, 165018–165028. [Google Scholar] [CrossRef]
- Krastev, I.; Tricoli, P. Boost Multilevel Cascade Inverter for Hydrogen Fuel Cell Light Railway Vehicles. IEEE Trans. Ind. Electron. 2022, 69, 7837–7847. [Google Scholar] [CrossRef]
- Vinodhini, J.S.; Babu, R.S.R. High voltage bidirectional cascaded H bridge 21 level multilevel inverter with regenerative braking for locomotive by comparing with (PID & ANFIS) and without controller. In Proceedings of the Fourth International Conference on Advances in Electrical, Electronics, Information, Communication and Bio-Informatics (AEEICB), Chennai, India, 27–28 February 2018. [Google Scholar] [CrossRef]
- Choudhury, A.P.; Pillay, P.; Williamson, S.S. Comparative Analysis Between Two-Level and Three-Level DC/AC Electric Vehicle Traction Inverters Using a Novel DC-Link Voltage Balancing Algorithm. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 529–540. [Google Scholar] [CrossRef]
- Teichmann, R.; Bernet, S. A comparison of three-level converters versus two-level converters for low-voltage drives, traction, and utility applications. IEEE Trans. Ind. Appl. 2005, 41, 855–865. [Google Scholar] [CrossRef]
- Dorn-Gomba, L.; Ramoul, J.; Reimers, J.; Emadi, A. Power Electronic Converters in Electric Aircraft: Current Status, Challenges, and Emerging Technologies. IEEE Trans. Transp. Electrif. 2020, 6, 1648–1664. [Google Scholar] [CrossRef]
- Chang, F.; Ilina, O.; Lienkamp, M.; Voss, L. Improving the Overall Efficiency of Automotive Inverters Using a Multilevel Converter Composed of Low Voltage Si mosfets. IEEE Trans. Power Electron. 2019, 34, 3586–3602. [Google Scholar] [CrossRef]
- Quraan, M.; Tricoli, P.; D’Arco, S.; Piegari, L. Efficiency Assessment of Modular Multilevel Converters for Battery Electric Vehicles. IEEE Trans. Power Electron. 2017, 32, 2041–2051. [Google Scholar] [CrossRef]
- Es-Saadi, M.; Khafallah, M.; Chaikhy, H. Using the Five-Level NPC Inverter to Improve the FOC Control of the Asynchronous Machine. In Proceedings of the 2017 International Renewable and Sustainable Energy Conference (IRSEC), Tangier, Morocco, 4–7 December 2017; pp. 1457–1466. [Google Scholar] [CrossRef]
- Chaikhy, H.; Khafallah, M.; Saad, A.; Es-Saadi, M.; Chikh, K. Evaluation des performances des commandes vectorielles de la machine à induction. Rev. Génie Ind. 2011, 6, 23–32. [Google Scholar]
- Garg, R.; Mahajan, P.; Gupta, N.; Saroa, H. A comparative study between field oriented control and direct torque control of AC traction motor. In Proceedings of the International Conference on Recent Advances and Innovations in Engineering, Jaipur, India, 9–11 May 2014. [Google Scholar] [CrossRef]
- Benzazah, C.; Ait Lafkih, M.; Lazrak, L. Etude comparative entre deux topologies d’onduleurs triphasés, classique à 2-niveaux et NPC à 3-niveaux avec deux différentes méthodes de commande MLI-ST et SWM. Int. J. Innov. Appl. Stud. 2014, 9, 841–852. [Google Scholar]
- Mehta, P.; Kunapara, A. Investigations on A3L_NPC Multilevel Inverter used for Even loss Balancing. Int. J. Recent Innov. Trends Comput. Commun. 2015, 2, 25–27. [Google Scholar]
- Pulikanti, S.R.; Dahidah, M.S.A.; Agelidis, V.G. SHE-PWM switching strategies for active neutral point clamped multilevel converters. In Proceedings of the Australasian Universities Power Engineering Conference AUPEC, Sydney, Australia, 14–17 December 2008; pp. 1–7. [Google Scholar]
- Chaikhy, H.; Es-saadi, M.M.; Khafallah, M. Assessment of field oriented induction machine control strategy using new generation of inverters in BB36000 locomotive. Int. J. Power Electron. Drive Syst. (IJPEDS) 2022, 13, 1295–1304. [Google Scholar] [CrossRef]
- Jing, X.; He, J.; Demerdash, N.A.O. Application and losses analysis of ANPC converters in doubly fed induction generator wind energy conversion system. In Proceedings of the International Electric Machines & Drives Conference, Chicago, IL, USA, 12–15 May 2013; pp. 131–138. [Google Scholar] [CrossRef]
- Geyer, T. Model predictive direct torque control of a five level ANPC converter drive system. IEEE Trans. Ind. Appl. 2012, 48, 5. [Google Scholar] [CrossRef]
- Rodriguez, J.; Lai, J.S.; Peng, F.Z. Multilevel Inverters; a survey of topologies, controls, and applications. IEEE Trans. Ind. Electron. 2002, 49, 724–738. [Google Scholar] [CrossRef] [Green Version]
- Kieferndorf, F.; Basler, M.; Serpa, L.; Fabian, A.; Coccia, J.H.; Scheuer, A. ANPC-3L technology applied to medium-voltage variable-speed drives applications. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Pisa, Italy, 14–16 June 2010. [Google Scholar]
- Bruckner, T.; Bernet, S.; Steimer, P. Feedforward loss control of three level active NPC converters. IEEE Trans. Ind. Appl. 2007, 43, 1588–1596. [Google Scholar] [CrossRef]
- Sayouti, Y.; Abbou, A.; Akherraz, M.; Mahmoudi, H. Real-time DSP implementation of DTC neural network-based for induction motor drive. In Proceedings of the Power Electronics, Machines and DrivesPEMD, Brighton, UK, 19–21 April 2010. [Google Scholar]
- Da Silva, E.R.C.; Dos Santos, E.C.; Jacobina, C.B. Pulsewidth Modulation Strategies. IEEE Ind. Electron. Mag. 2011, 5, 37–45. [Google Scholar] [CrossRef]
- Ghaffari, A. dSPACE and Real-Time Interface in Simulink; San Diego State University: San Diego, CA, USA, 2012; pp. 7–12. [Google Scholar]
- Hasmuni, S.; Harun, S.M. The Development of Simulink Model of Vector Control of an Induction Machine; Kolej Universiti Teknikal Kebagsaan: Malacca, Malaysia, 2005. [Google Scholar]
- Akroum, H.; Kidouche, M.; Aibeche, A. A dSPACE DSP Control Platform for V/F Controlled Induction Motor Drive and Parameters Identification. In Advances in Computer, Communication, Control and Automation; Lecture Notes in Electrical Engineering (LNEE-Springer); Springer: Berlin/Heidelberg, Germany, 2011; Volume 121, pp. 305–312. [Google Scholar] [CrossRef]
- Versèle, C.; Deblecker, O.; Lobry, J.; Bury, G. Implementation of advanced control schemes using dSPACE material for teaching induction motor drive. Int. J. Electr. Eng. Educ. 2010, 47, 151–167. [Google Scholar] [CrossRef]
- Maki, K.; Partanen, A.; Rauhala, T.; Repo, S.; Järventausta, P. Realtime simulation environment for power system studies using RTDS and dSPACE simulators. In Proceedings of the 11th International Power Electronics and Applications EPE, Dresden, Germany, 11–14 September 2005. [Google Scholar]
- Pandav, K.M.; Mahajan, S.B.; Sanjeevikumar, P.; Badave, S.M.; Pachagade, R. 2.4 kW Three-Phase Inverter for Aircraft Application-Hardware Implementation. In Advances in Power Systems and Energy Management Lecture Notes in Electrical Engineering (Springer); Springer: Berlin/Heidelberg, Germany, 2017; Volume 436, pp. 325–335. [Google Scholar] [CrossRef]
- Es-saadi, M. Contribution a l’etude de l’ensemble Onduleur Multiniveaux et Machine Asynchrone en Vue d’une Application a la Traction Ferroviaire; Hassan II University: Casablanca, Morroco, 2018. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Va | Switching State | |||
|---|---|---|---|---|
| T2+ | T1+ | T2− | T1− | |
| Vdc/2 | 1 | 1 | 0 | 0 |
| 0 | 0 | 1 | 1 | 0 |
| −Vdc/2 | 0 | 0 | 1 | 1 |
| Parameters | Signification | |
|---|---|---|
| IM parameters | Rs = 5.63 | Stator Resistance (Ω) |
| Rr = 2.62 | Rotor Resistance (Ω) | |
| M = 0.364 | Mutual inductance (H) | |
| Ls = 0.382 | Stator inductance (H) | |
| Lr = 0.382 | Rotor inductance (H) | |
| J = 0.023 | Factor of inertia(Kg·m2) | |
| Experimental parameters | f = 0.00155 | Coefficient of friction |
| p = 2 | Number of pole pairs | |
| p = 1.5 | Rated power (KW) | |
| Vdc = 150 | DC bus voltage (V) | |
| Fpwm = 2000 | Pulse width modulation frequency (Hz) | |
| F = 10 | Sampling frequency (KHz) | |
| Kppi = 0.59, Kipi = 2.3 | Integral and proportional coefficients for PI controller | |
| Kpip = 0.297, Kiip = 6.01 | Integral and proportional coefficients for IP controller |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Es-saadi, M.; Chaikhy, H.; Khafallah, M. Implementation and Investigation of an Advanced Induction Machine Field-Oriented Control Strategy Using a New Generation of Inverters Based on dSPACE Hardware. Appl. Syst. Innov. 2022, 5, 106. https://doi.org/10.3390/asi5060106
Es-saadi M, Chaikhy H, Khafallah M. Implementation and Investigation of an Advanced Induction Machine Field-Oriented Control Strategy Using a New Generation of Inverters Based on dSPACE Hardware. Applied System Innovation. 2022; 5(6):106. https://doi.org/10.3390/asi5060106
Chicago/Turabian StyleEs-saadi, Mouna, Hamid Chaikhy, and Mohamed Khafallah. 2022. "Implementation and Investigation of an Advanced Induction Machine Field-Oriented Control Strategy Using a New Generation of Inverters Based on dSPACE Hardware" Applied System Innovation 5, no. 6: 106. https://doi.org/10.3390/asi5060106