1. Introduction
With the rapid development of communication technologies, the application scenarios of 6G networks often need to cope with massive access users and data volumes, which also bring about serious challenges in terms of network latency, quality of service (QoS), capacity, and other metrics. Traditional centralized cloud computing and fixed base station communication methods may suffer from high interaction latency and network congestion because they are far away from user terminals [
1]. To address this problem, mobile edge computing (MEC) technology [
2,
3,
4,
5] sinks computing resources to wireless access networks closer to user terminals, and further extends it to non-user networks, such as Wi-Fi access. This effectively reduces the transmission delay and energy consumption and creates a service environment with high communication performance and transmission bandwidth. It could be used in vehicle networking, virtual reality, augmented reality, industrial control, autonomous driving, and other applications [
6,
7,
8,
9,
10]. Unmanned aerial vehicles (UAVs) are highly autonomous and flexible, are able to transmit messages without signal occlusion and reduce fading caused by signal reflection, scattering, diffraction, and penetration. Therefore, UAVs have certain communication and computing capabilities and are often used as mission execution carriers, cellular network nodes, and transmission relays [
11,
12,
13,
14,
15]. As a result, the UAV-MEC network was created. It combines the high autonomy and flexibility of UAVs with the benefits of MEC networks to provide users with flexible coverage, reliable communication connectivity, and powerful computing capabilities [
16,
17,
18].
Most of the UAV-MEC research studies assume that a single UAV is applied to MEC networks [
19,
20,
21]. However, in real scenarios, UAVs may need to face massive user access and data transmissions, where the energy and computational resources of a single UAV could not support efficient and continuous work. In contrast, UAV clusters cannot only reduce these problems, but also gain benefits through cluster collaborations, improving system scalability and performance. Therefore, it is important to consider how UAVs collaborate with each other. The authors of [
22] proposed a decentralized deep reinforcement learning algorithm to enable UAV clusters to autonomously and distributedly learn dynamic coordination strategies by exploiting the deterministic state transfer property of the system, which effectively improves the system’s task computational rate. The authors of [
23] jointly optimize the system’s computational resource allocation, power control, and user association to minimize the power of the system. In order to solve this non-convex optimization problem, the researchers proposed a centralized multi-intelligent body reinforcement learning algorithm and a semi-distributed federated reinforcement-learning algorithm, respectively, which effectively achieves the optimization of the system latency and power metrics. The authors of [
24] modeled the optimization problem as a discrete Stackelberg game model with priorities to obtain network hierarchical characteristics. Also, they proved that the subgame at each priority level was an ordered potential game with the Nash equilibrium, and proposed a hierarchical learning algorithm that could achieve fast convergence of hierarchical grouping strategies for UAV clusters.
After summarizing and analyzing the existing research on UAV-MEC networks, we found the following limitations:
User grouping and relay selection: In the case of UAV clusters as relays to assist the communication, the ground users should cooperate in groups and select different UAVs for transmission, but there is very limited research on the integration of the user grouping as well as the relay selection strategies.
Resource management and power allocation: Existing research studies have been conducted on power allocation and resource management under specific grouping methods and relay selection structures, lacking a unified approach.
In this paper, we investigate the grouping method and relay selection structure problems in UAV cluster-assisted relay transmission. Specifically, we establish a communication model for UAV cluster-assisted ground users to offload computational tasks to the ground base station. Meanwhile, the system throughput is taken as the objective function under the constraints of communication delay and transmission power, and the problem is decoupled into two subproblems. More importantly, we propose a hierarchical matching relay selection algorithm and a weighted relay selection algorithm to maximize the throughput of the system, where simulation results demonstrate the effectiveness and superiority of the proposed algorithm.
The rest of the paper is organized as follows. The system model is elaborated on in
Section 2. The proposed hierarchical matching relay selection algorithm and weighted relay selection algorithm are presented in
Section 3. The simulation results are presented in
Section 4. The conclusions and future work are presented in
Section 5.
2. System Model
As shown in
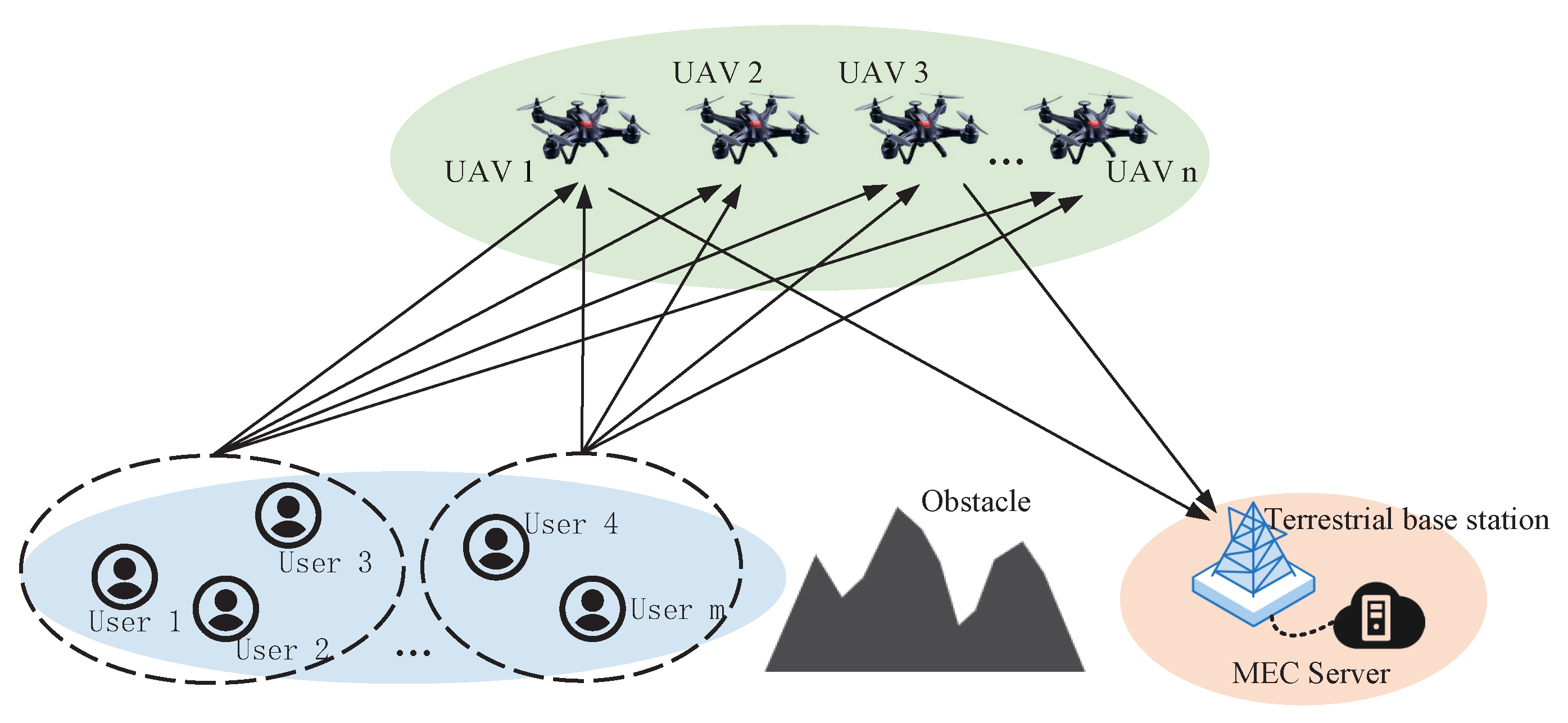
Figure 1, we consider a UAV cluster-assisted relay transmission model. The model has
M ground users,
N UAVs, and a ground base station with a deployed MEC server. The ground users and UAVs are assumed to be homogeneous, and both have the same constraint of transmission power, set as
and
, respectively. The computational ability of the MEC server is measured by the number of CPU cycles required by the MEC server to compute each bit of input data, set as
f. The set of UAVs is defined as
, and the set of ground users is defined as
, where the number of ground users is much higher than the number of UAVs,
. The ground users are randomly distributed in a specific range of the horizontal space, and the 3D coordinate positions could be expressed as
. The UAVs are randomly distributed in the three-dimensional space, and their coordinate positions could be expressed as
. Note that the UAVs need to keep a certain distance from each other to avoid mutual collision and interference. In addition, during the process of information transmission and relay forwarding, the UAVs maintain a hovering state with fixed three-dimensional coordinates to ensure the stability of the communication link.
In order to fully utilize the spectrum resources,
M ground users will be divided into
N groups with an unlimited number of ground users within each group. Assuming that the total system bandwidth is
B, and the spectrum resources are equally divided into
N orthogonal sub-channels, the bandwidth of the sub-channel assigned to the
ith group is
, expressed as
Specifically, ground users within the same group use uplink non-orthogonal multiple access (NOMA) to cooperate in offloading, and ground users between different groups use frequency division multiple access (FDMA) to transmit in different frequency bands. At the same time, different UAVs will also use FDMA to transmit information to the base station.
2.1. System Transmission Model
As shown in
Figure 1, there may be obstacles in the communication environment that impede the communication. Thus, there is a line-of-sight (LOS) channel primary path component along with a non-line-of-sight (NLOS) channel multipath component in the communication link. Therefore, the Rician fading channel [
25,
26] is employed in this paper.
Additionally,
denotes the channel gain between the
ith UAV and the
jth ground user.
denotes the channel gain between the
ith UAV and the ground base station. Assuming that there are
k ground users in the group assisted by the
ith UAV, the received signal
of the
ith UAV could be expressed as
note that
is the additive Gaussian white noise (AWGN), satisfying a mean of 0 and a variance of
.
is the transmission power of the
jth ground user in the
ith UAV-assisted group, which could not exceed the upper limit of the ground user transmission power
, which means
In the uplink NOMA mode, the decoding order at the receiving end is determined by the strength of each sub-signal. From Equation (
2), the received strength is related to the signal power, so the decoding is done in descending order of the signal power. The inter-group interference of the
jth ground user in the
ith UAV-assisted group are computed as
where
is the number of users in the
ith UAV-assisted user group; therefore, the signal-to-noise ratio (SNR) of the
jth ground user in the
ith UAV-assisted user group is given by
According to the Shannon channel capacity, the information transmission rate
could be expressed as
therefore, the throughput from a user group to its corresponding UAV could be expressed as
More specifically, the decode-and-forward (DF) technique is used for UAVs to relay the received signal. In this strategy, the UAV receives the signal from the user group and performs the decode–recode–forward operation on the signal, reducing the transmission process interference. Then, the UAV uses FDMA to transmit the signal to the ground base station. Therefore, the
ith UAV information transmission rate
could be expressed as
For the
ith UAV, the transmission power could not exceed the constraint of the UAV transmission power
, which means
similar to Equation (
7), the throughput from the
ith UAV to the ground base station could be given by
Under the DF method, the system throughput is limited by the minimum of the throughput from the source node to the relay node and the throughput from the relay node to the destination node. Therefore, the system throughput of the transmission process for the
ith UAV-assisted user group would be expressed as
In this paper, the system throughput
C is the sum of all user group throughputs, which could be expressed as
2.2. System Computation Model
In UAV-MEC networks, the computational task to be performed by the jth ground user could be defined as a binary group , where denotes the amount of data for the computational task to be performed by the jth ground user, and denotes the maximum transmission delay tolerable for the computational task. These two parameters indicate that the computational task to be performed by the ground user is computationally intensive and time-sensitive. Assuming that the computational tasks are indivisible, they are transmitted to the ground base station by a UAV relay through a complete offloading method.
Note that time and energy consumption need to be considered during the offloading and transfer of computational tasks from the ground user to the MEC server. For the
jth ground user in the NOMA group of the
ith UAV-assisted relay, the computational task transmission time
and the energy consumption
from the source node to the relay node could be expressed as
Equation (
13) utilizes the relationship between the total system bandwidth
B and the sub-channel bandwidth
. From Equation (
14), it could be seen that the energy consumption of the computational task is related to the ground user transmission power and the information transmission rate. Meanwhile, it could be seen from Equation (
6) that the information transmission rate is also related to the ground user transmission power. Therefore, without loss of generality, this paper converts the transmission process energy constraint problem into a transmission power constraint problem.
Neglecting the UAV decoding–recoding time, for the
ith UAV relay, the transmission time
of the computational task of the auxiliary NOMA group from the relay node to the destination node is the sum of the transmission times of all users in the group, denoted as
For the
jth ground user in the NOMA group of the
ith UAV-assisted relay, the time of the computational task execution process at the MEC server
could be expressed as
where
is the number of CPU cycles required by the
jth ground user in the
ith NOMA group to compute the task unit data volume. In this paper, ground users perform similar types of tasks, and without loss of generality,
takes the same value for all ground users.
For the
jth ground user in the NOMA group of the
ith UAV-assisted relay, the energy consumption of the execution process of the computational task at the MEC server
could be expressed as
where
is the computational power of the MEC server deployed at the ground base station. In this paper, the MEC server is deployed with high computational power and energy supply, and thus, without loss of generality, the energy consumption of the MEC server is negligible.
Therefore, for the
jth ground user in the NOMA group of the
ith UAV-assisted relay, the total task execution delay
could be expressed as
Since the computational tasks are delay-sensitive, for all UAV computational tasks, the total delay could not exceed the maximum tolerable transmission delay
, which means
2.3. Problem Formulation
The system transmission and computation model show that ground users are required to perform computation-intensive and delay-sensitive tasks, which need to be transmitted by the UAV-assisted relay to the ground base station due to resource constraints. Therefore, our goal is to maximize the system throughput under the constraints of computational resources as well as transmission delay.
The system throughput of the proposed model is affected by various factors, including the ground user grouping situation, the UAV relay selection situation, and the power allocation of the ground users in the NOMA system. Among them, the two factors, ground user grouping and UAV relay selection, are correlated and together determine the actual communication grouping structure. Therefore, in this section, these two factors are unified as the relay selection structure. Thus, the system parameters include the relay selection structure and power allocation for ground users, where the system’s objective function could be expressed as
where parameter
is the set of relay selection structures and parameter
is the set of ground user power allocations. Constraint
C1 indicates that the total delay of all ground users’ computing tasks could not exceed the maximum tolerable transmission delay of computing tasks. Constraint
C2 indicates that the transmission power of all ground users could not exceed the upper limit of ground users’ transmission power. Constraint
C3 indicates that the transmission power of all UAVs could not exceed the upper limit of the UAV transmission power constraint. In constraint
C4,
indicates the relay selection structure of the
ith UAV relay and its auxiliary NOMA user group. That means the concatenation set of all relay selection structures includes all ground users, and the intersection set of all relay selection structures is the empty set, which ensures the ground user completeness of the computational task transmission. Notably, we restrict the minimum distance between UAVs so that they cannot overlap or collide.
The objective function established in this paper is a joint problem of two parameters, the relay selection structure and ground user power allocation. To simplify the treatment, Equation (
20) is decoupled into two subproblems—relay selection and power allocation—expressed as
where
is a binary offloaded variable that could be traversed over all ground users that reflecting their cooperation with each UAV. More specifically, subproblem
P2 is the power allocation problem in the fixed relay selection structure, and in this paper, we deal with it using a fractional transmit power allocation (FTPA) algorithm. Subproblem
P1 is a relay selection structure problem in the context of determining the ground user power allocation. To illustrate the nature of the problem, the objective function could be split into the sum of the throughputs of each NOMA group. However, subproblem
P1 is non-convex because of the presence of discrete binary variables
, which is difficult to solve by traditional optimization methods. Therefore, this paper adopts the matching idea to solve the problem.
3. Relay Selection Algorithm
For the UAV-assisted relay transmission model developed in this paper, the bilateral matching participants consist of the set of ground users and the set of UAVs. The number of ground users is much more than the number of UAVs. Therefore, the bilateral matching problem in this paper is a many-to-one matching problem.
3.1. Hierarchical Matching Relay Selection
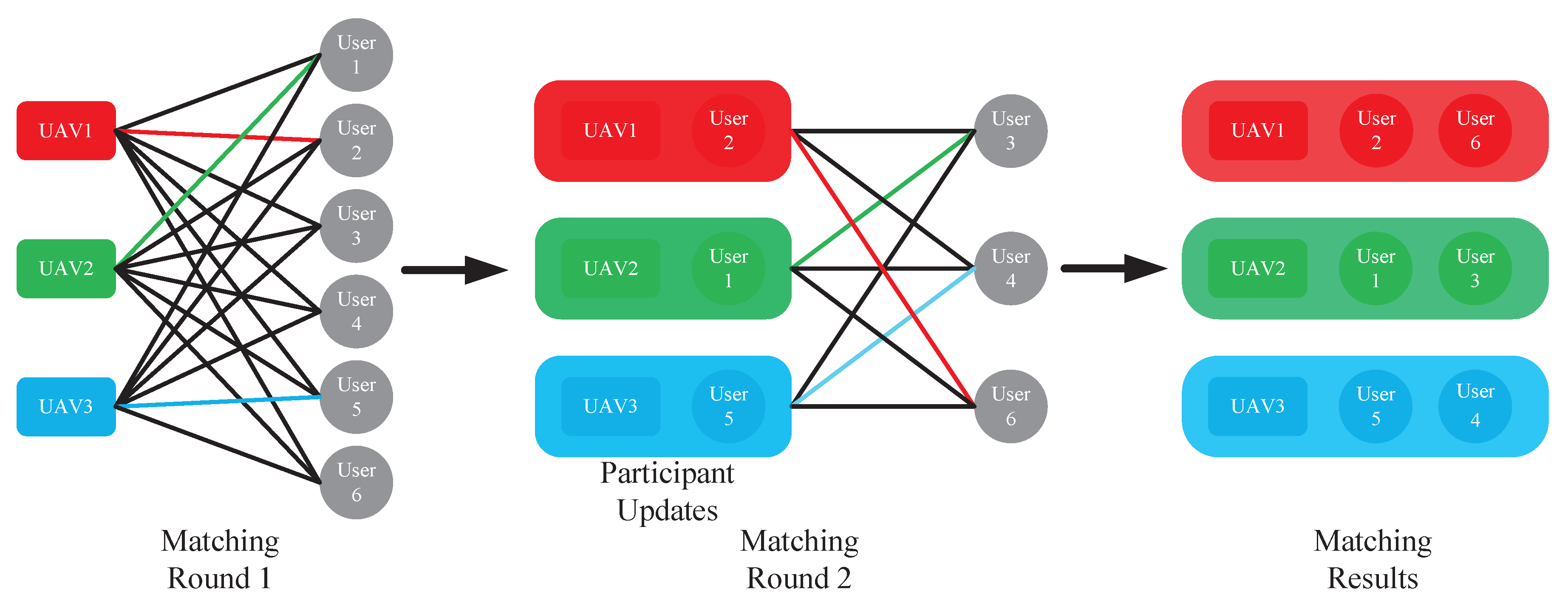
Ground users matched to the same UAV cooperate for information transmission with NOMA. However, after ground users and UAVs cooperate, the nature of the UAV set changes due to the case of intra-group interference. Specifically, the UAV that cooperates with the ground user changes its utility function value for other ground users. If the other ground users still follow the original preference relationship for the matching process, this does not reflect the actual situation of the system. As shown in
Figure 2, a matching round is defined as the ground user set sends a cooperation request based on the preference relationship and the UAV set responds to the cooperation request based on the preference relationship. The process from the start of matching to the point where all participants have no intention to change the matching result is denoted as a matching round. After a matching round, UAVs that have cooperated with ground users exist, so the preference relationships of the participants need to be adapted. Specifically, the unmatched ground users are the match initiators, and the UAVs with these connected ground users are considered as match responders. Based on this, the preference relationship is updated and the next matching round begins until all ground users cooperate with the UAV. The proposed hierarchical matching relay selection algorithm is shown in Algorithm 1.
| Algorithm 1: Hierarchical matching relay selection algorithm |
- ₁
Step 1: Initialization (1) Input parameters: ground users set M, UAVs set N, channel gain sets H. (2) Initializing preference relationship sequences. Step 2: Hierarchical matching (1) While M ≠ ⌀: (2) While Prem ≠ ⌀: (3) Each unmatched ground user sends a match request to the highest-ranked UAV based on a preference relationship sequence; (4) If UAV was not matched with ground users: (5) Match successfully; (6) Else: (7) If the original matching user ranks higher: (8) Refuse the new matching request; (9) Else: (10) Refuse the original matching request; (11) Rejected users remove the selected UAV from the preference relationship sequence; (12) End if; (13) End if; (14) Repeat (3); (15) End while; (16) Update the M, N, and preference relationship sequence set; (17) Repeat (2); (18) End while.
|
In the first round, the priority during initialization is determined by the transmission process throughput in descending order. Note that the throughput from the source node to the relay node should be calculated as the OMA method because all users have not cooperated. During the matching process, each ground user checks the matching status and does not perform an operation if a match has already been realized with a UAV. Instead, the sequence of preference relationships is checked and the UAV with the highest ranking in the sequence of preference relationships is selected to issue a match request. Meanwhile, each UAV first checks the matching status after receiving the matching request sent by the ground user. If a match has not yet been realized with the ground user, it chooses to accept the match request. Instead, the UAV needs to make a choice based on the preference relationship sequence. If the ground user sending the match request has a higher preference relationship ranking, the UAV will end the cooperative relationship with the original ground user and it realizes a new match. On the contrary, the UAV will maintain a cooperative relationship with the original ground user and reject the new match request. In both cases, the rejected ground users are required to remove the UAV from the sequence of preference relationships. When all the ground users’ matching requests are responded to by the UAVs, one matching round is over. Repeat the above steps until all unmatched ground users are no longer able to issue matching requests to the UAV, which means for all unmatched ground users, the preference relationship sequence is empty, represented by Premi = ⌀. In this case, the set of ground users and the set of UAVs form N binary matching pairs (i, j), where i and j are the index of UAVs and ground users, respectively. With the number of ground users far exceeding the number of UAVs, there are still () ground users that have not achieved a match. After the second round of matching, if there are still unmatched ground users, then () of these users remain unmatched. The set of ground users and the set of UAVs then constitute N ternary matching pairs, denoted as (i, j, k). Subsequently, in the ith round, there are () that remain unmatched. These users, in combination with the set of UAVs, form N i-element matching pairs with the set of UAVs, which serves as a target for matching with the remaining ground users.
3.2. Weighted Relay Selection
Algorithm 1 considers the high-priority ground user and the UAV as a whole at the end of each matching round and acts as a matching responder for the next round, ensuring the accuracy of the preference relationship. However, the algorithm ignores a possible situation where vulnerable users are disadvantaged in this algorithm. Assuming that the preference relationship sequence and the function values for ground user
a and ground user
b are represented as
where
and
represent the preference relationships of users
a and
b, respectively, and ≻ means that the former has a higher utility value. In this case,
a and
b have identical preference relationship sequences but different utility function values. During the matching process, the vulnerable user
b is rejected by UAV
and is forced to choose to match with UAV
. However, user
a always obtains a high utility value when matching with any UAV; vulnerable user
b obtains a lower utility value when matched with the remaining UAVs, except
, and this situation leads to a lower total utility value of the system. Therefore, it is important to propose a new algorithm, which could compensate for vulnerable users.
The core idea of the improved algorithm is to weigh the value of the utility function of the vulnerable user to improve its chances of being selected by the UAVs. Specifically, in the improved algorithm, the preference relationship sequence should focus not only on the ranking order but also on the corresponding utility value. Thus, without loss of generality, the preference relationship sequence of any ground user
is re-expressed as
where
is the value of the utility function when the ground user
is matched with the UAV
. Based on this, three parameters are designed: the trigger threshold
, the weighted ratio
, and the weighted round
. In a matching round, when the ground user is rejected by the UAV to which it sends a matching request, the following operation is performed:
- (1)
Compare the utility values of the current UAV
with a UAV that has the next highest preference ranking
. Calculate the percentage increase
in the utility of the ground user matching
compared to matching
:
- (2)
Compare and . If , we consider that the rejected user is not a vulnerable user and continue the normal matching process; if , consider the rejected user is a vulnerable user.
- (3)
For vulnerable users, is weighted and a matching request is resent to UAV with the weighted utility function value. If the matching request is accepted, the algorithm ends; if the matching request is rejected, step (1) is repeated with an upper limit of number of repetitions.
The proposed weighted relay selection algorithm for vulnerable users is shown in Algorithm 2.
| Algorithm 2: Weighted relay selection algorithm |
- ₁
Step 1: Initialization (1) Input parameters: set of preference relationship sequences , the trigger threshold , the weighted ratio , and the weighted round . Step 2: Weighted matching (1) While the ground user’s matching request was rejected ∩ : (2) Calculate ; (3) If : (4) Stop; (5) Else: (6) , ; (7) Send a matching request to the UAV again; (8) End if; (9) End while.
|
3.3. Algorithm Stability
In order to understand the stability of the matching results, the definition of an impeded stable matching pair is given as follows.
If there exists a matching pair , and the matching pair does not exist in the set of matches that have already appeared, which means . However, for the participants of this matching pair, there exists a matching result , , which means and , which indicates that for the matching pair , this matching result destroys the original matching result, so it is called an impeded stable matching pair.
The algorithm proposed in this paper is essentially a one-to-one matching of multiple rounds, so as long as the stability of the one-to-one matching is understood, the stability of the algorithm would be understood.
For the final matching results , assuming that there is an impeded stable matching pair , there are two possibilities: sent a match request to the , or did not send a match request to the . For the former, does not exist, as the would have received match requests from participants higher in their preference order. For the latter, (inviter, responder) also does not exist because either a match request sent to was declined, or there is another participant ranked higher than in ’s preference order.
4. Simulation Results and Analysis
This section verifies the performance simulation of the hierarchical matching relay selection algorithm and the weighted relay selection algorithm proposed in the above section. The simulation parameters are set as shown in
Table 1.
The comparison algorithm we adopt is the classical relay selection strategy: max–SR [
27], max–RD [
28], and max–min [
29]. The idea of the max–SR relay selection algorithm is to select the relay node with the largest instantaneous SNR between the S-R links, and the optimal relay under this algorithm could be expressed as
similarly, the max–RD algorithm finds the relay node with the largest instantaneous SNR of the R-D link, which could be given by
the core idea of the max–min algorithm is to consider the quality of both links simultaneously, which could be expressed as
note that the max–RD and max–min algorithms require a channel state feedback mechanism.
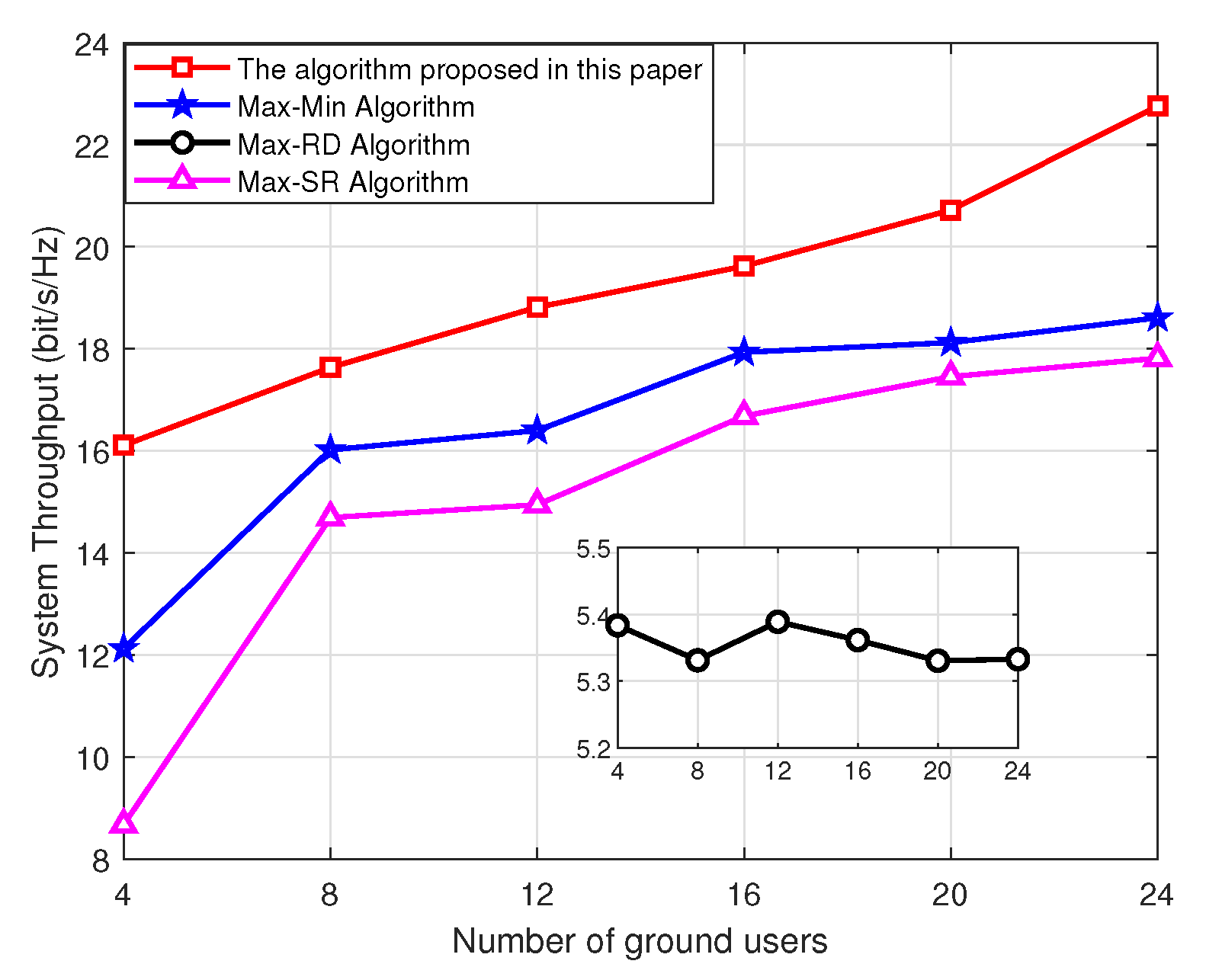
Figure 3 presents the system throughput using our proposed hierarchical matching relay selection algorithm with the comparison algorithm for a different number of ground users when the number of UAVs is fixed. Note that we set the number of UAVs to 4,
N = 4, and the number of ground users ranges from 4 to 24. The parameter settings are based on the numerical relationship,
. This is because an increase in the number of users does not notably enhance the performance given the transmission power limitations of the UAVs The simulation results show that with the increase in ground users, the system throughput with the max–RD algorithm varies only in a small range and tends to be smooth. This is because in the max–RD algorithm, the relay selection depends only on the channel gain of the R-D link, so there will be a situation where all the ground users select the same relay UAV, and the system throughput is less affected by the change in the number of users. In the max–min and max–SR algorithms, the system throughput gradually increases as the number of users increases, due to the fact that ground users have more UAVs to choose from. It is worth noting that in our proposed algorithm, the system throughput gradually increases and it is significantly higher than the comparison algorithm, which indicates that our proposed algorithm has better user scale adaptability. This is due to the advantages of NOMA and the fact that we always utilized all the UAVs available as relay nodes.
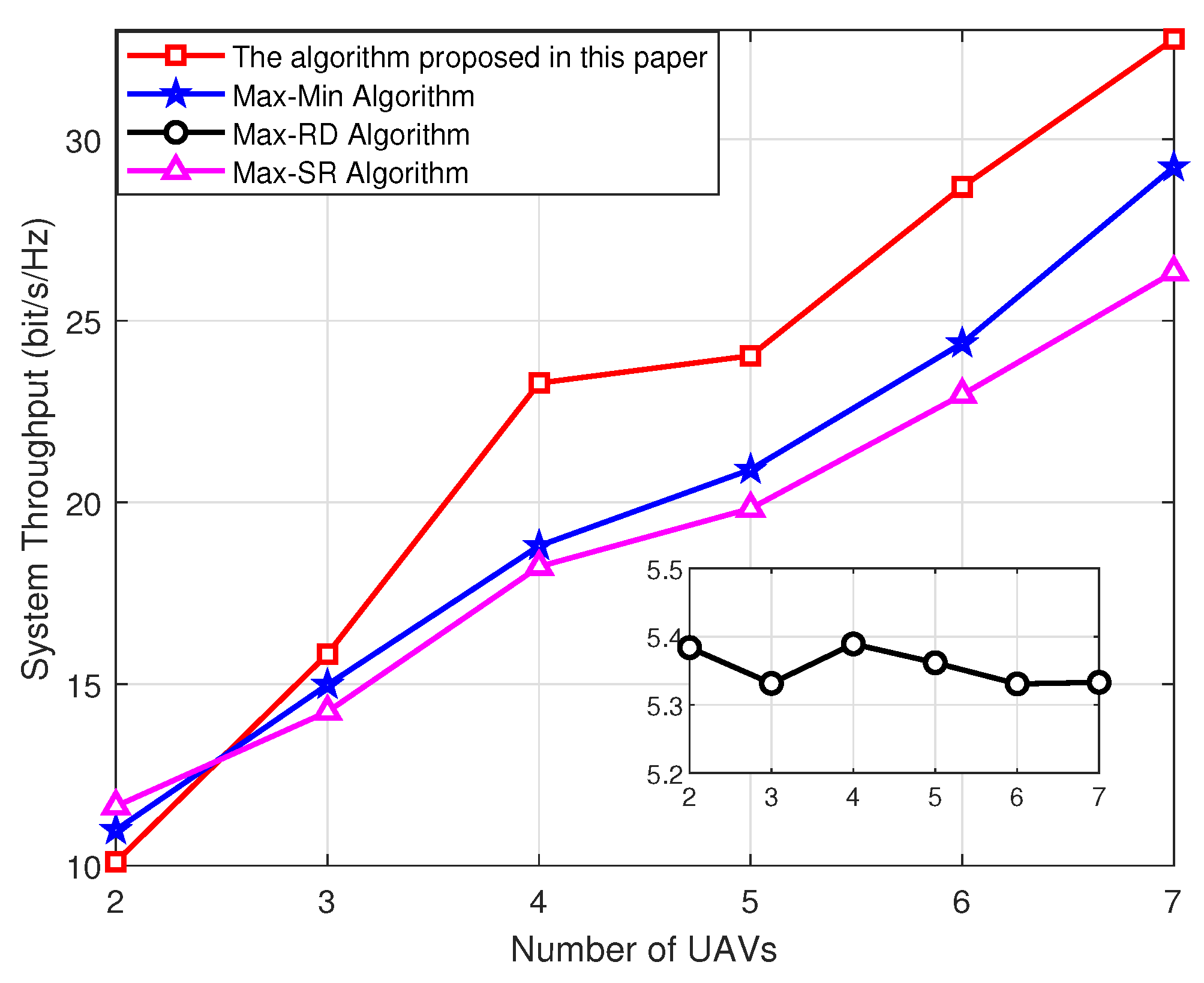
Figure 4 presents the system throughput for different numbers of UAVs when the ground user numbers are fixed. Note that we set the number of ground users to 20,
M = 20, and the number of UAVs to range from 2 to 7. The parameter settings are based on the numerical relationship between the two and the fact that more UAVs only have smaller performance gains with any algorithm under our tests. The simulation results show that as the available UAV numbers increase, the system throughput using the max–RD algorithm only changes within a small range and there is no upward trend. This is because in the case of the max–RD algorithm, the relay selection only depends on the channel gain between the UAVs and the destination node. Therefore, it may occur that ground users choose the same relay UAV, and the system throughput is less affected by changes in the number of UAVs. In the case of the max–min algorithm and max–SR algorithm, the communication links supporting simultaneous transmission increase as the UAV numbers increase. Therefore, the probability of UAVs with high channel gain increases, and ground users have more UAV choices, improving the system throughput. For the algorithm proposed in this paper, as the UAVs increase, the number of users in each NOMA group decreases, and user interference in the group decreases, which improves the system throughput. It could be seen that although increasing the number of UAVs increases the resource expenditure, it could significantly improve the system throughput.
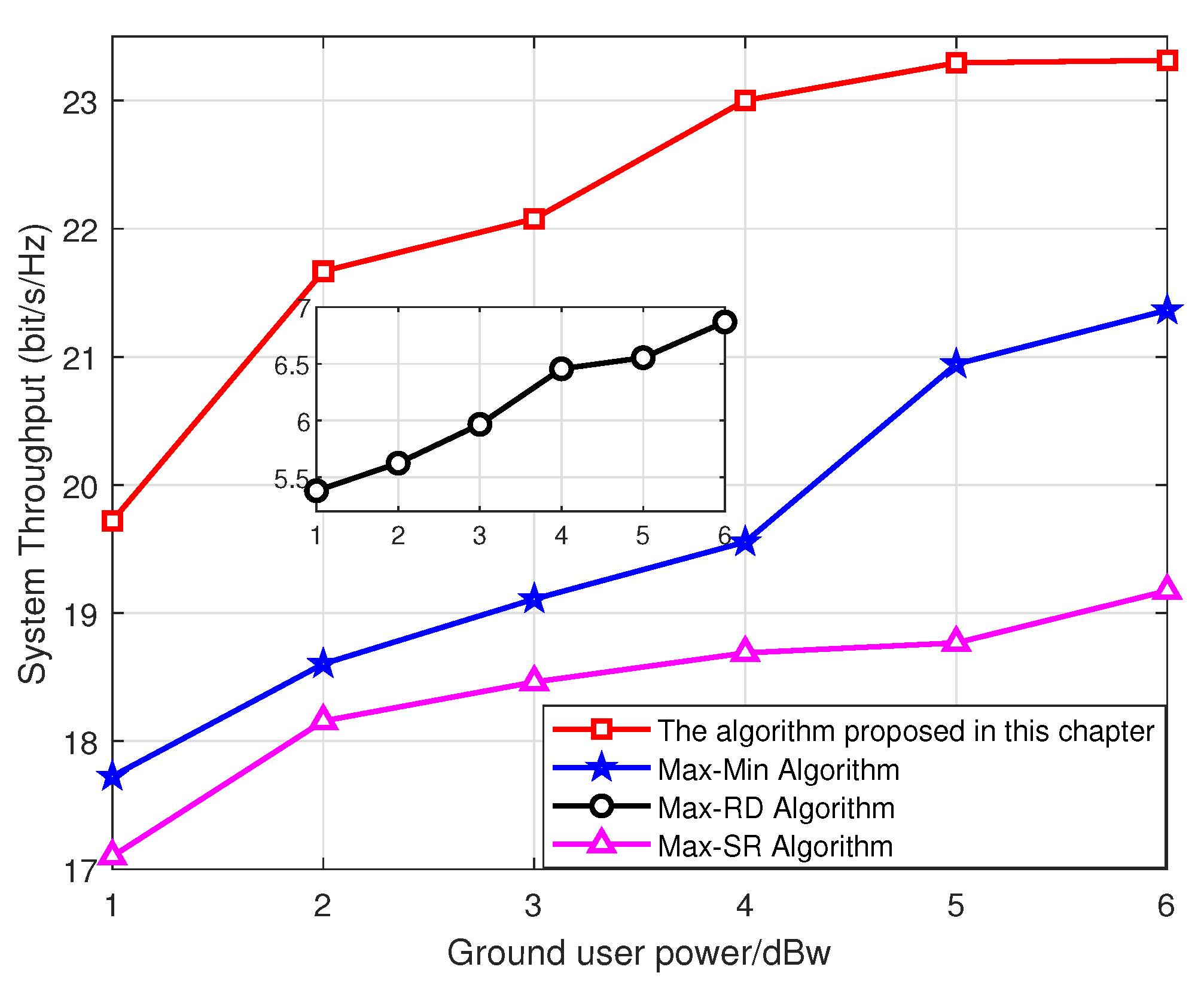
Figure 5 presents the system throughput using our proposed hierarchical matching relay selection algorithm with the comparison algorithm for different user maximum transmission power scenarios, with the number of ground users
M = 20 and the number of UAVs
N = 4. The simulation results show that the system throughput with both the proposed algorithm and the comparison algorithm gradually increases as the maximum transmission power increases within a certain range. It is noteworthy that the system throughput is highest in the case of the proposed algorithm. This is due to the fact that when the maximum transmission power of the ground user increases, the SNR of the ground user’s transmission also increases and, therefore, the system throughput increases. Note that the system throughput in the case of the proposed algorithm shows a decreasing growth rate tendency as the transmission power of the ground user increases, while the growth rate of the comparison algorithm remains almost constant. This is due to the fact that the comparison algorithm uses the OMA method for transmission and there is no intra-group user interference. However, the proposed algorithm uses the NOMA method for transmission, and as the ground user transmission power increases, the intra-group user interference also increases, and when it reaches a point where its effect on the SNR is close to that of the transmission power on the SNR, the growth rate of the system throughput decreases. This indicates that the proposed algorithm is sensitive to transmission power.
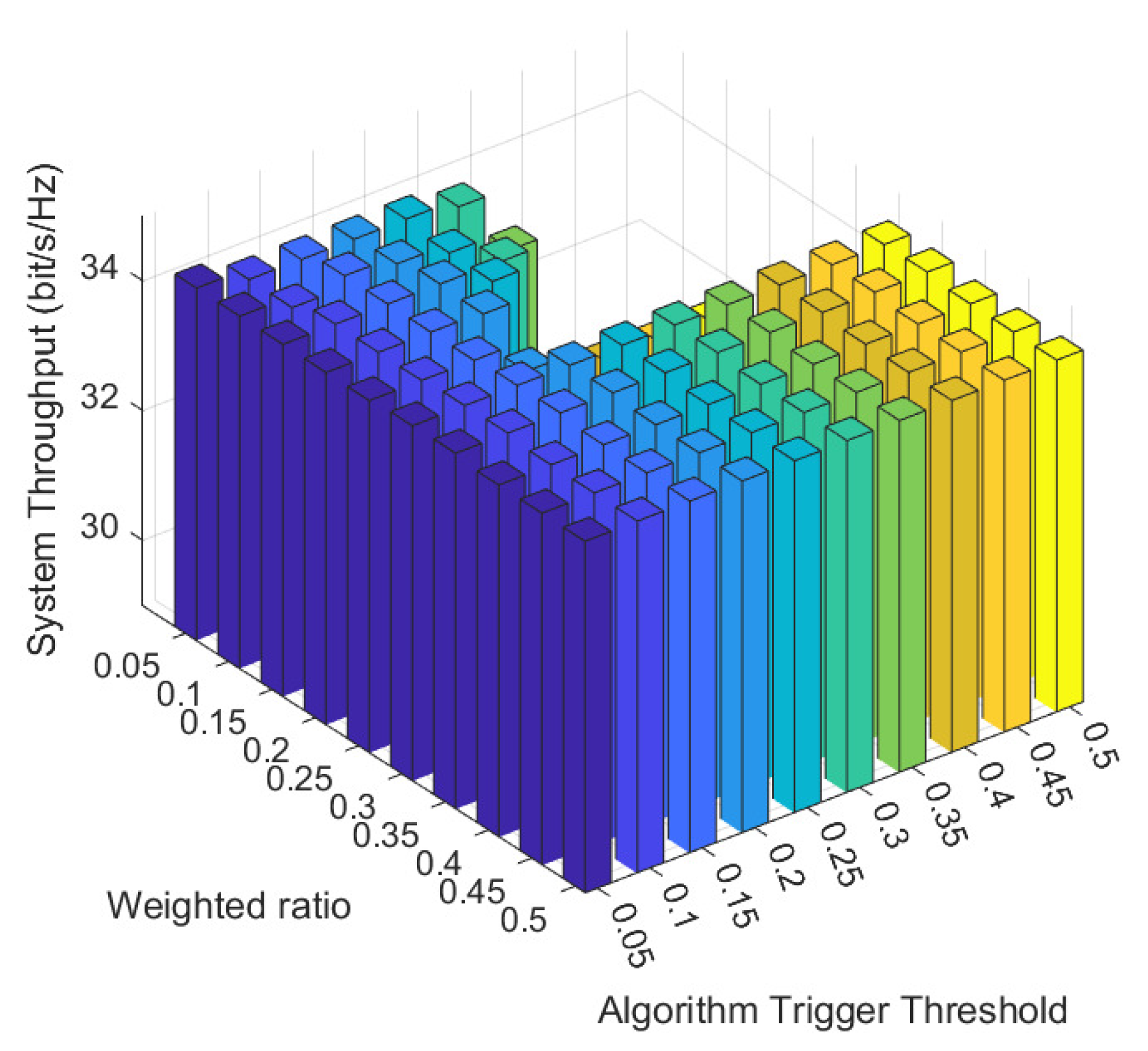
Figure 6 presents the system throughput using the weighted relay selection algorithm for different algorithm parameters when the number of ground users is
M = 50 and the number of UAVs is
N = 7. The simulation results show that, within a certain parameter range, when the weighted ratio is fixed, the system throughput gradually increases as the trigger threshold decreases; when the trigger threshold is fixed, the system throughput gradually increases as the weighted ratio increases. Outside the parameter range, the system throughput remains stable and high. This is due to the fact that as the trigger threshold decreases and the weighted ratio increases, it makes the bias toward vulnerable users higher. Therefore, the vulnerable users are weighted to be re-matched in a way that improves the system throughput. After a certain range is reached, all possible vulnerable users have been involved in the proposed algorithm, so the system throughput remains stable at a higher value.
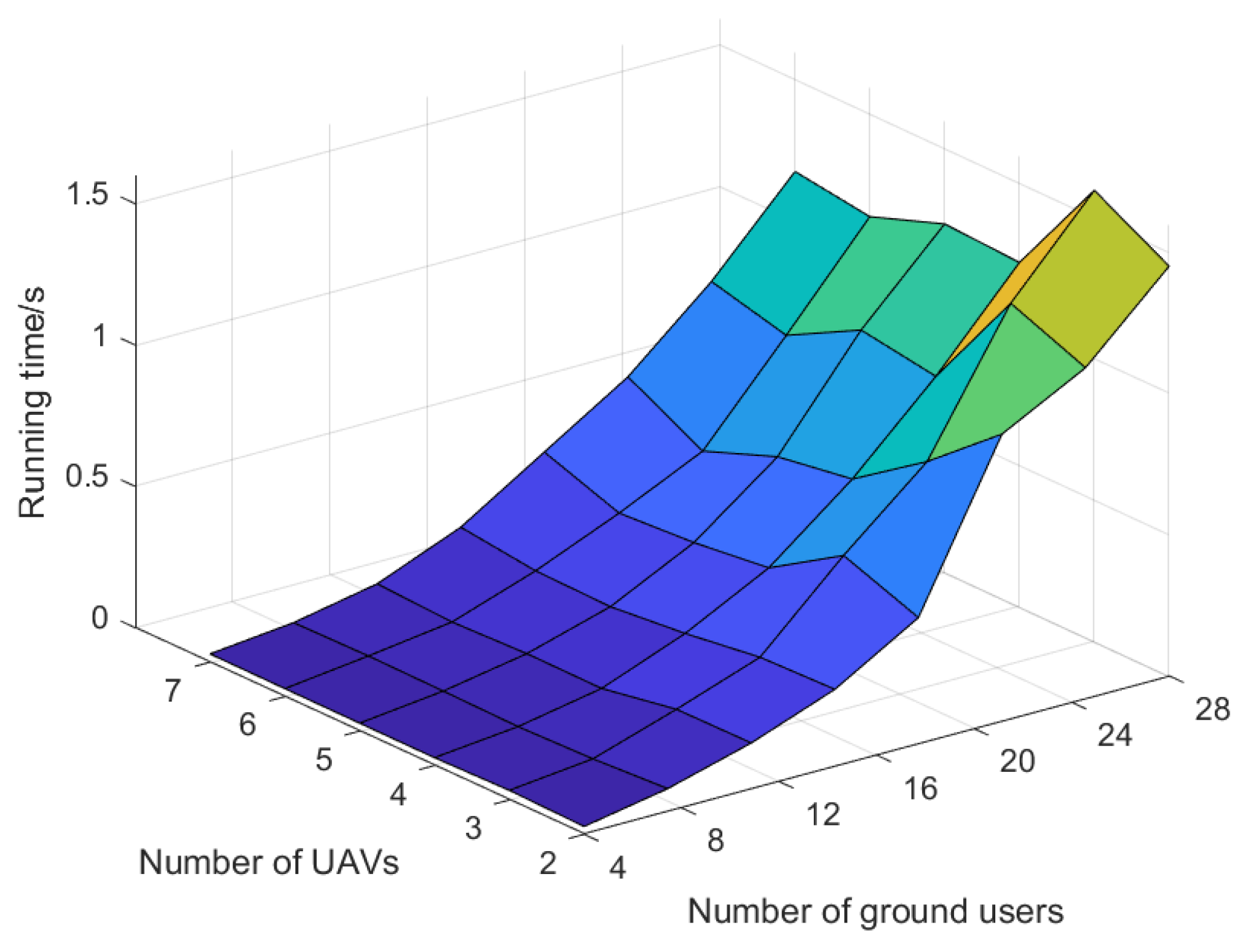
Figure 7 presents the variation of the algorithm’s runtime with the number of UAVs and the number of ground users for the weighted relay selection algorithm with the upper weighted round limit
= 5. The simulation results show that the algorithm running time rises gradually with the increase in the number of ground users and the growth rate increases gradually, which indicates that the ground users as the initiators of the matching have a greater impact on the algorithm running time. Note that the algorithm running time is less affected by the change in the number of UAVs. Based on this and
Figure 4, we can consider that increasing the number of UAVs could significantly increase the system throughput while controlling the running time of the algorithm.
5. Conclusions and Future Work
In this paper, a typical model of UAV-assisted relay transmission is established, and the transmission and computation process of the model is analyzed. Also, this paper jointly controls the transmission power and relay selection structure to optimize the objective function of the system throughput for resource-limited and delay-sensitive communication conditions. More importantly, we propose a hierarchical matching relay selection algorithm and a weighted relay selection algorithm for vulnerable users based on the matching idea, where the simulation results verify the superiority of the proposed algorithm. It should be noted that the weighted relay selection algorithm has better performance compared to the hierarchical matching relay selection algorithm, but there will be more resource investments and higher latency, which need to be selected according to the actual situation. For the power allocation problem in this scenario, please refer to our subsequent work.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}