
LAP and IRS Enhanced Secure Transmissions for 6G-Oriented Vehicular IoT Services


Abstract
:1. Introduction
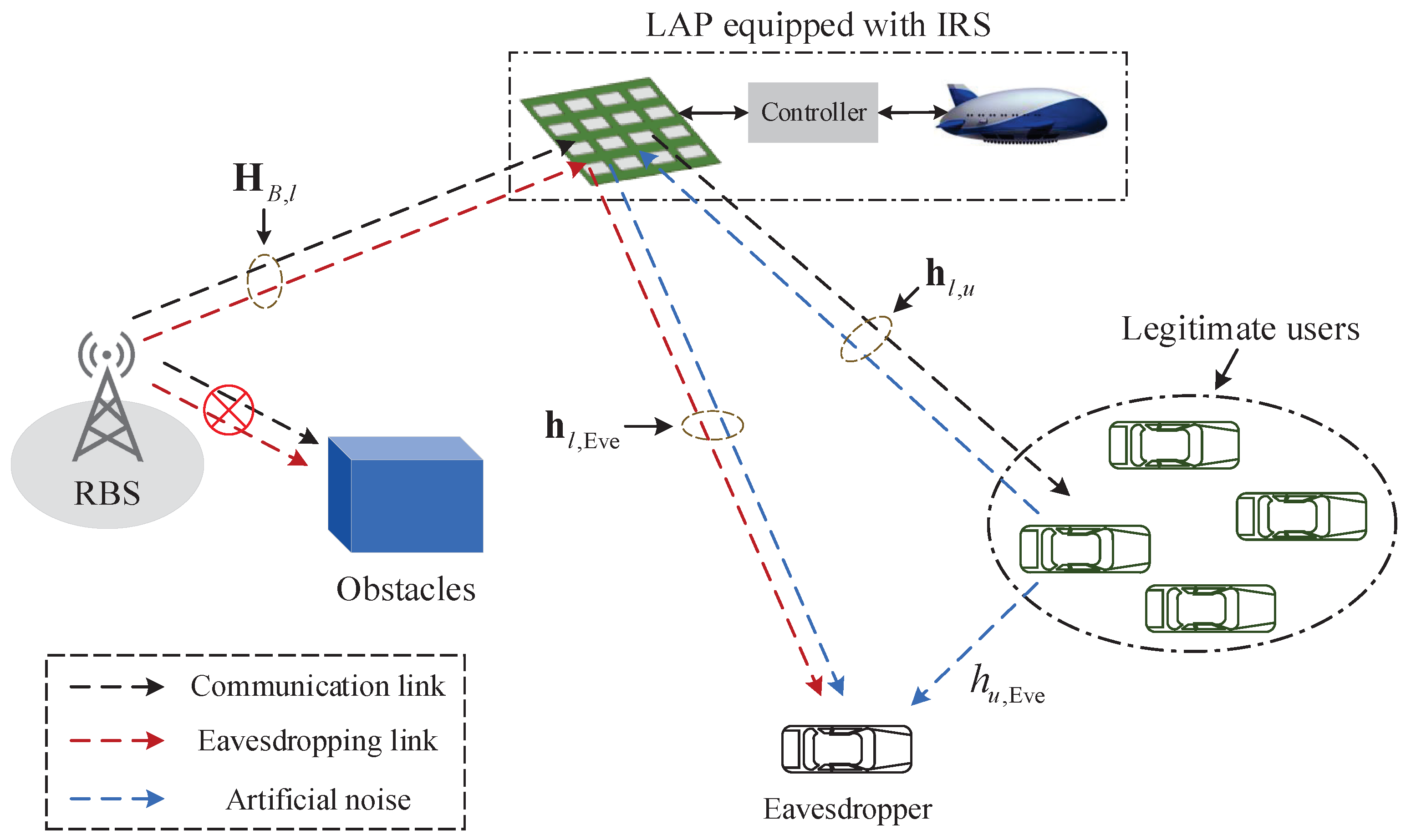
2. Network Model and Problem Formulation
3. Total Secure Channel Capacity Maximization Scheme
3.1. Phase Shift Optimization
3.2. Power Distribution Coefficient Optimization
3.3. Channel Allocation
| Algorithm 1 Optimal channel allocation algorithm for P6 |
|
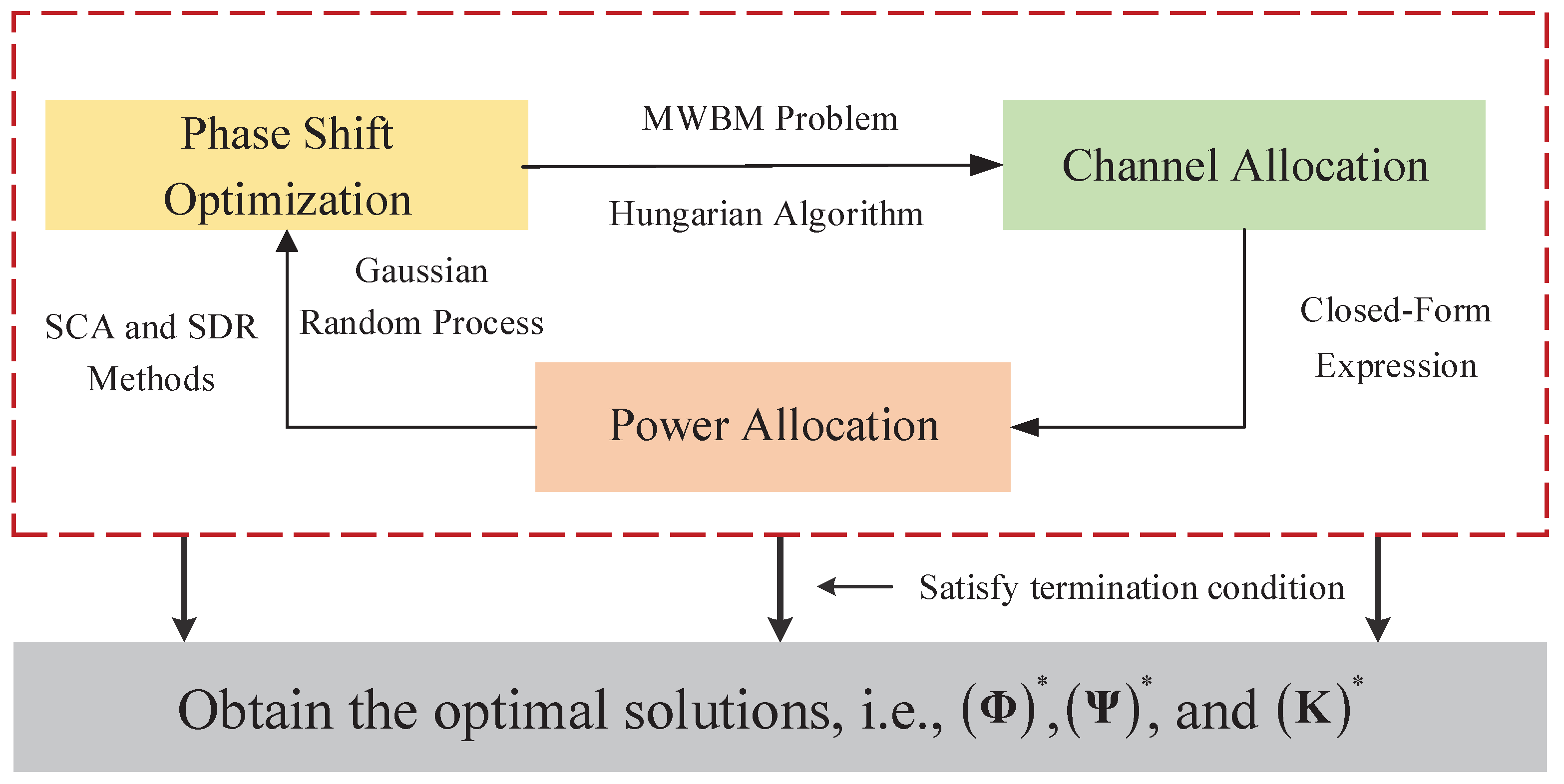
3.4. Overall Algorithmic Framework
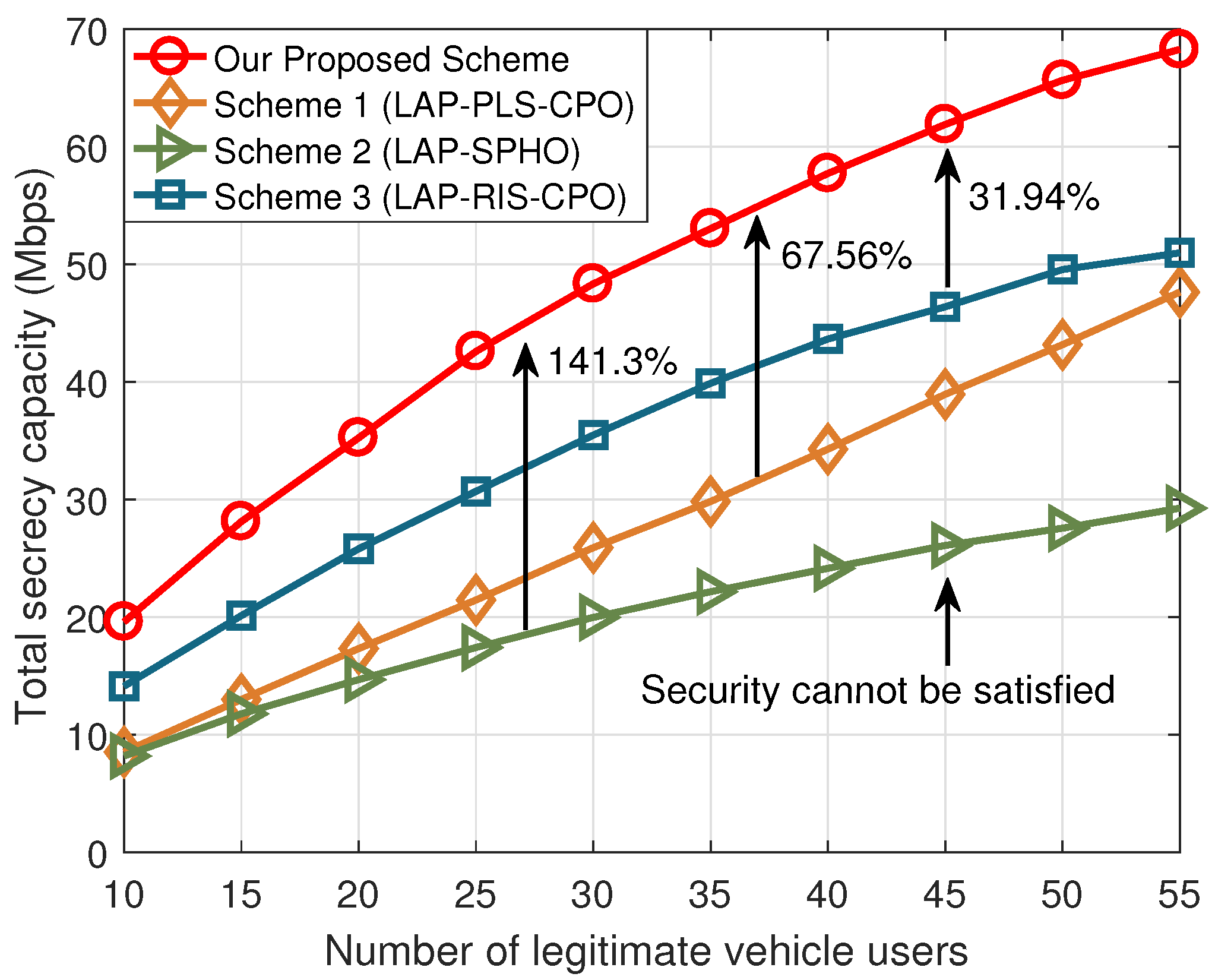
4. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, C.; Li, Z.; Zhang, H.; Ng, D.W.K.; Al-Dhahir, N. Achieving covertness and security in broadcast channels with finite blocklength. IEEE Trans. Wireless Commun. 2022, 21, 7624–7640. [Google Scholar]
- Zhai, D.; Li, H.; Tang, X.; Zhang, R.; Ding, Z.; Yu, F.R. Height optimization and resource allocation for NOMA enhanced UAV-aided relay networks. IEEE Trans. Commun. 2021, 69, 962–975. [Google Scholar]
- Wang, C.; Li, Z.; Shi, J.; Ng, D.W.K. Intelligent reflecting surface-assisted multi-antenna covert communications: Joint active and passive beamforming optimization. IEEE Trans. Commun. 2021, 69, 3984–4000. [Google Scholar]
- Fawaz, W. Effect of non-cooperative vehicles on path connectivity in vehicular networks: A theoretical analysis and UAV-based remedy. Veh. Commun. 2018, 11, 12–19. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hasson, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV cellular communications: Practical aspects standardization advancements regulation and security challenges. IEEE Commun. Surveys Tuts. 2019, 21, 3417–3442. [Google Scholar]
- Schweiger, K.; Preis, L. Urban air mobility: Systematic review of scientific publications and regulations for vertiport design and operation. Drones 2022, 6, 179. [Google Scholar]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Hassan, J.; Alhartomi, M.A.; Shvetsova, S.V.; Sahal, R.; Hawbani, A. Computing in the sky: A survey on intelligent ubiquitous computing for UAV-assisted 6G networks and industry 4.0/5.0. Drones 2022, 6, 177. [Google Scholar]
- Cao, Y.; Lv, T.; Ni, W. Intelligent reflecting surface aided multi-user mmWave communications for coverage enhancement. In Proceedings of the 2020 IEEE 31st Annual International Symposium on Personal, Indoor and Mobile Radio Communications, London, UK, 31 August–3 September 2020; pp. 1–6. [Google Scholar]
- Pan, Q.; Wu, J.; Nebhen, J.; Bashir, A.K.; Su, Y.; Li, J. Artificial intelligence-based energy efficient communication system for intelligent reflecting surface-driven VANETs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19714–19726. [Google Scholar]
- Zhi, K.; Pan, C.; Ren, H.; Wang, K. Power scaling law analysis and phase shift optimization of RIS-aided massive MIMO systems with statistical CSI. IEEE Trans. Commun. 2022, 70, 3558–3574. [Google Scholar]
- You, C.; Kang, Z.; Zeng, Y.; Zhang, R. Enabling smart reflection in integrated air-ground wireless network: IRS meets UAV. IEEE Wireless Commun. 2021, 28, 138–144. [Google Scholar] [CrossRef]
- Shafique, T.; Tabassum, H.; Hossain, E. Optimization of wireless relaying with flexible UAV-borne reflecting surfaces. IEEE Trans. Commun. 2021, 69, 309–325. [Google Scholar] [CrossRef]
- Samir, M.; Elhattab, M.; Assi, C.; Sharafeddine, S.; Ghrayeb, A. Optimizing age of information through aerial reconfigurable intelligent surfaces: A deep reinforcement learning approach. IEEE Trans. Veh. Technol. 2021, 70, 3978–3983. [Google Scholar] [CrossRef]
- Iacovelli, G.; Coluccia, A.; Grieco, L.A. Channel gain lower bound for IRS-assisted UAV-aided communications. IEEE Commun. Lett. 2021, 25, 3805–3809. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Long, K.; Nallanathan, A. Exploring sum rate maximization in UAV-based multi-IRS networks: IRS association, UAV altitude, and phase shift design. IEEE Trans. Commun. 2022, 70, 7764–7774. [Google Scholar] [CrossRef]
- Al-Jarrah, M.; Al-Dweik, A.; Alsusa, E.; Iraqi, Y.; Alouini, M.-S. On the performance of IRS-assisted multi-layer UAV communications with imperfect phase compensation. IEEE Trans. Commun. 2021, 69, 8551–8568. [Google Scholar] [CrossRef]
- Su, Y.; Pang, X.; Chen, S.; Jiang, X.; Zhao, N.; Yu, F.R. Spectrum and energy efficiency optimization in IRS-assisted UAV networks. IEEE Trans. Commun. 2022, 70, 6489–6502. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Poor, H.V. Joint optimization of IRS and UAV-trajectory: For supporting statistical delay and error-rate bounded QoS over mURLLC-driven 6G mobile wireless networks using FBC. IEEE Veh. Technol. Mag. 2022, 17, 55–63. [Google Scholar] [CrossRef]
- Ji, Z.; Yang, W.; Guan, X.; Zhao, X.; Li, G.; Wu, Q. Trajectory and transmit power optimization for IRS-assisted UAV communication under malicious jamming. IEEE Trans. Veh. Technol. 2022, 71, 11262–11266. [Google Scholar] [CrossRef]
- Wang, D.; He, T.; Zhou, F.; Cheng, J.; Zhang, R.; Wu, Q. Outage-driven link selection for secure buffer-aided networks. Sci. China Inf. Sci. 2022, 65, 182303. [Google Scholar] [CrossRef]
- Sun, G.; Tao, X.; Li, N.; Xu, J. Intelligent reflecting surface and UAV assisted secrecy communication in millimeter-wave networks. IEEE Trans. Veh. Technol. 2022, 70, 11949–11961. [Google Scholar] [CrossRef]
- Wang, D.; Wu, M.; He, Y.; Pang, L.; Xu, Q.; Zhang, R. An HAP and UAVs collaboration framework for uplink secure rate maximization in NOMA-enabled IoT networks. Remote Sens. 2022, 14, 4501. [Google Scholar] [CrossRef]
- He, Y.; Nie, L.; Guo, T.; Kaur, K.; Hassan, M.M.; Yu, K. A NOMA-enabled framework for relay deployment and network optimization in double-layer airborne access VANETs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22452–22466. [Google Scholar] [CrossRef]
- Ding, X.; Song, T.; Zou, Y.; Chen, X.; Hanzo, L. Security-reliability tradeoff analysis of artificial noise aided two-way opportunistic relay selection. IEEE Trans. Veh. Technol. 2017, 66, 3930–3941. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Liu, J.; Cao, Y. Intelligent reflecting surface empowered physical-layer security: Signal cancellation or jamming? IEEE Internet Things J. 2022, 9, 1265–1275. [Google Scholar] [CrossRef]
- He, Y.; Wang, D.; Huang, F.; Zhang, R.; Gu, X.; Pan, J. A V2I and V2V collaboration framework to support emergency communications in ABS-aided Internet of Vehicles. IEEE Trans. Green Commun. Netw. 2023; Early access. [Google Scholar] [CrossRef]
- Luo, Z.; Ma, W.; So, A.M.; Ye, Y.; Zhang, S. Semidefinite relaxation of quadratic optimization problems. IEEE Signal Process. Mag. 2010, 27, 20–34. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Key Contributions | Limitation |
|---|---|---|
| [14] | The channel gain lower bound for LAP and IRS collaborative communications was derived. | These works make an implicit assumption that LAP-based IRS symbiotic vehicular networks (VNets) are secure. In LAP-based IRS symbiotic VNets, the privacy information is susceptible to eavesdropping due to the open nature of A2G channels. |
| [15] | The sum rate maximization problem of LAP-aided IRS networks was investigated, where the phase shift and LAP altitude were optimized. | |
| [16] | The IRS-assisted multi-layer aerial architecture was proposed. | |
| [17,18,19,20] | By considering the beamforming, resource allocation, and energy efficiency, the channel capacity was improved. |
| Parameter | Definition |
|---|---|
| U | Number of legitimate vehicle users |
| G | Number of reflection elements |
| N | Number of antennas |
| K | Number of channels |
| Total power | |
| Transmitted power of the RBS | |
| Transmitted power of AN | |
| Received signal of the u-th legitimate vehicle user | |
| Channel from IRS to the u-th legitimate vehicle user | |
| Phase shift matrix | |
| Channel from the RBS to IRS | |
| Transmitted signal from the RBS for the u-th legitimate vehicle user | |
| Channel from IRS to the eavesdropper | |
| AN signal emitted by the u-th legitimate vehicle user | |
| Channel from the u-th legitimate vehicle user to the eavesdropper | |
| Noise received by the eavesdropper | |
| Information rate of the u-th legitimate vehicle user | |
| Channel bandwidth of the u-th legitimate vehicle user | |
| Information rate of the eavesdropper | |
| Power distribution coefficient of the u-th legitimate vehicle user | |
| Secure channel capacity of the u-th legitimate vehicle user | |
| Total secure channel capacity | |
| Total power of the system |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Min, L.; Li, J.; He, Y.; Si, Q. LAP and IRS Enhanced Secure Transmissions for 6G-Oriented Vehicular IoT Services. Drones 2023, 7, 414. https://doi.org/10.3390/drones7070414
Min L, Li J, He Y, Si Q. LAP and IRS Enhanced Secure Transmissions for 6G-Oriented Vehicular IoT Services. Drones. 2023; 7(7):414. https://doi.org/10.3390/drones7070414
Chicago/Turabian StyleMin, Lingtong, Jiawei Li, Yixin He, and Qin Si. 2023. "LAP and IRS Enhanced Secure Transmissions for 6G-Oriented Vehicular IoT Services" Drones 7, no. 7: 414. https://doi.org/10.3390/drones7070414