

Drones Routing with Stochastic Demand
 ,
,
Abstract
:1. Introduction
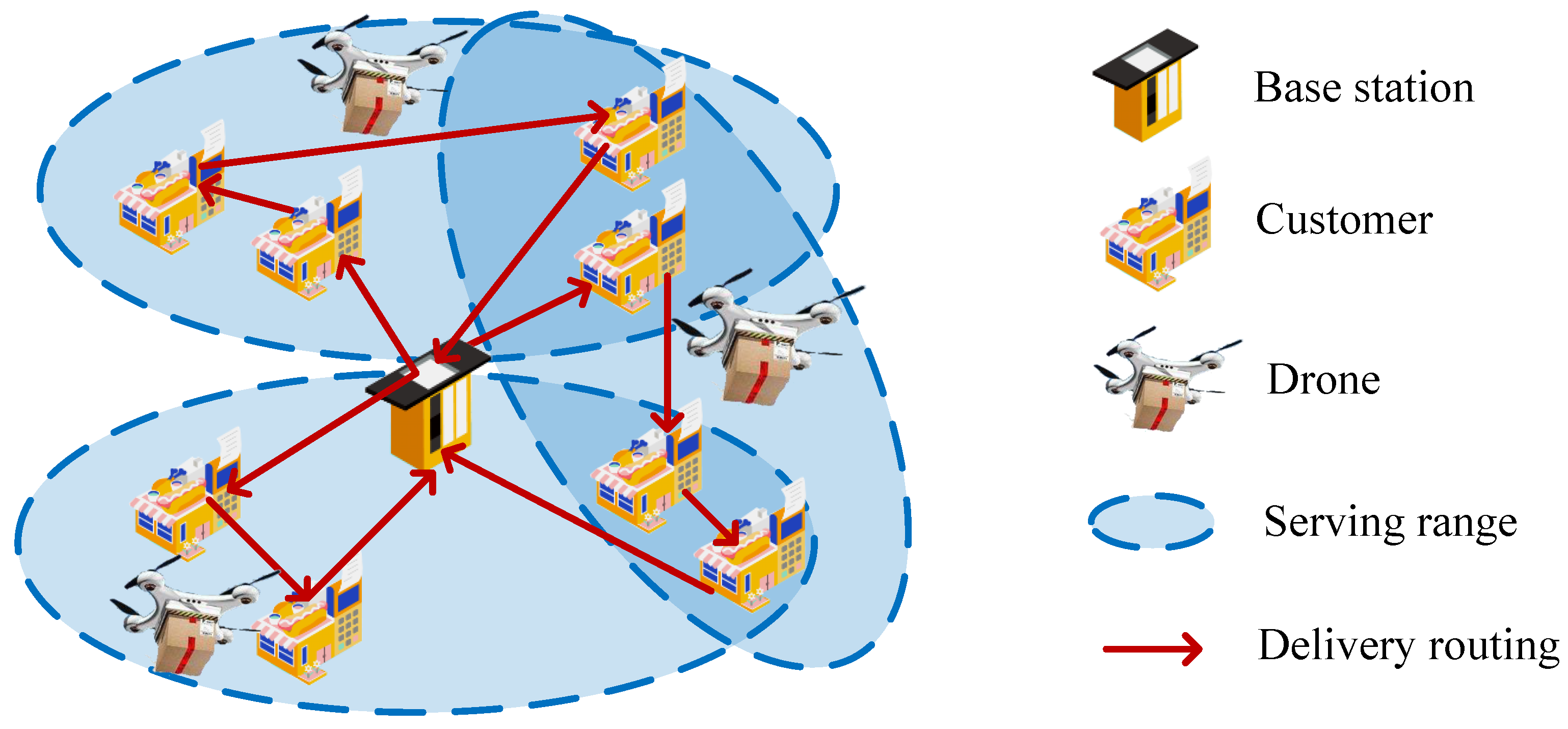
- Drone routing for package delivery can save labor as no drivers are needed
- Drone routing for package delivery can provide faster and on-time delivery service for customers
- Drone routing for package delivery is not limited by the complex road network
- Drone contactless delivery for nucleic acid test samples, plasma, medicines, and other medical supplies;
- Fresh food and daily groceries delivery for customers every day;
- Takeaway delivery.
- We first give the definition of MORE—the collaborative delivery route design with stochastic demands for customers.
- We develop a comprehensive algorithm to solve MORE and give the performance analysis for the proposed algorithm.
2. Related Work
3. Problem Definition and Algorithm Overview
3.1. Assumptions
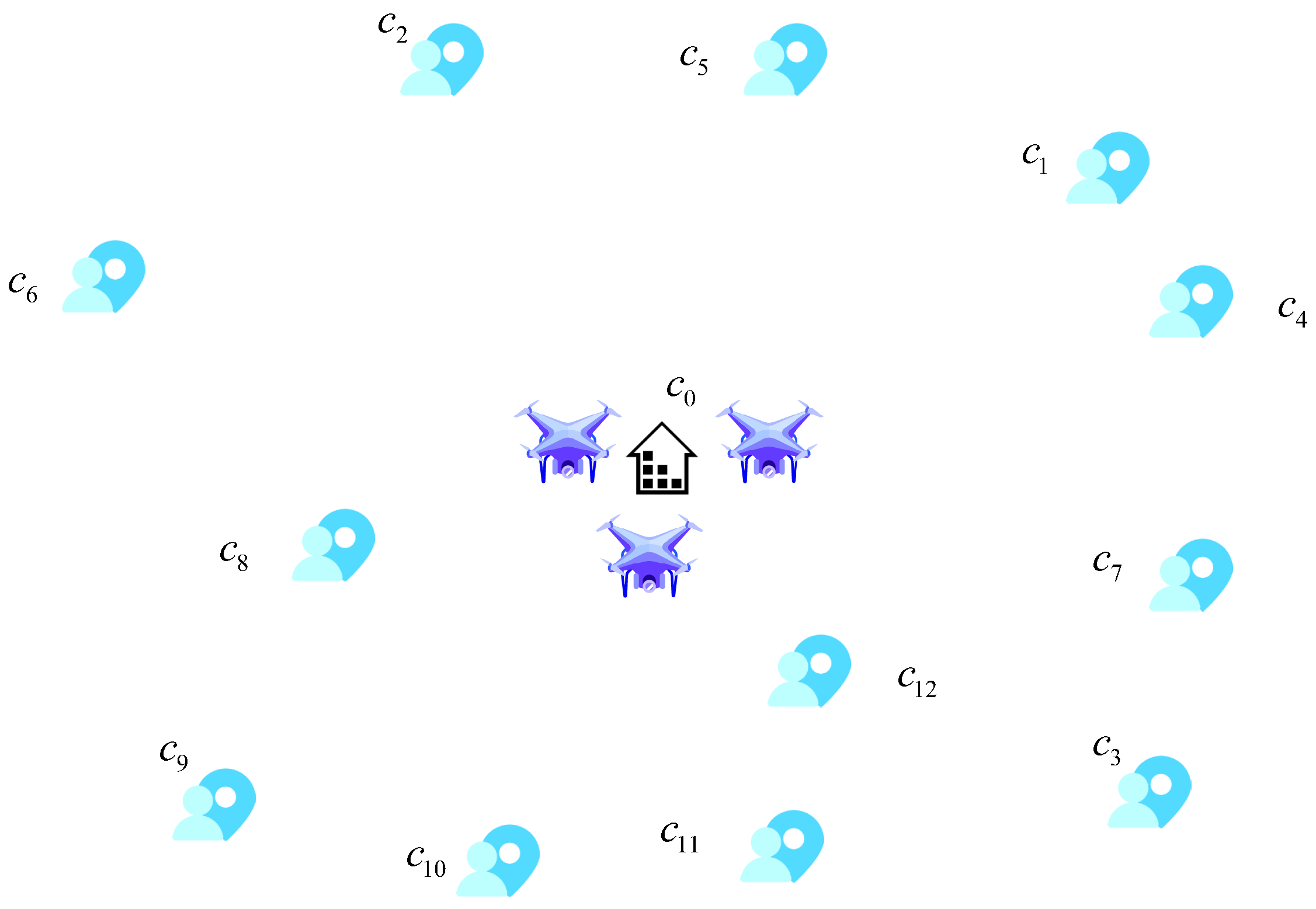
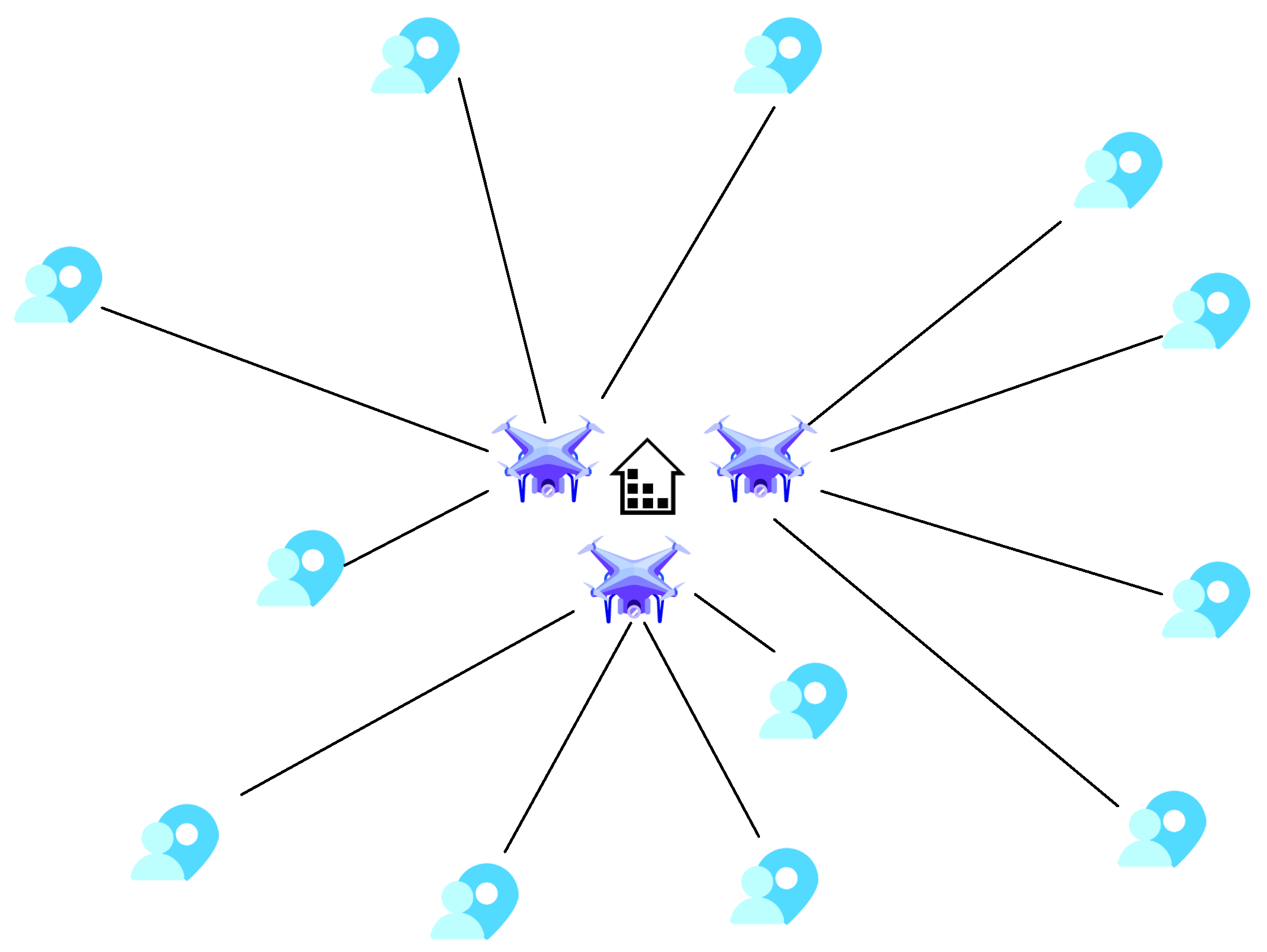
- All drones start flying from the depot, deliver several parcels for customers, and need to return to the depot to load new parcels with recharging.
- The depot has enough batteries for drones to provide energy.
- All drones are homogeneous; that is, all drones have the same limited capacity, flight speed, and so on.
- The sum of demands of served customers by a drone in one trip can not exceed the capacity of the drone.
- The stochastic demand for each customer is independently and identically distributed.
- The flight speed of all drones is constant, and we do not consider the weather factor affecting flight speed.
- The time to replace batteries, load parcels at the depot, and unload parcels for customers is ignored.
- The takeoff and landing processes of all drones for different customers are the same.
3.2. Drone Routing Cost Model
3.3. Problem Formulation
3.4. Algorithm Overview
4. Approximation Algorithm for MORE
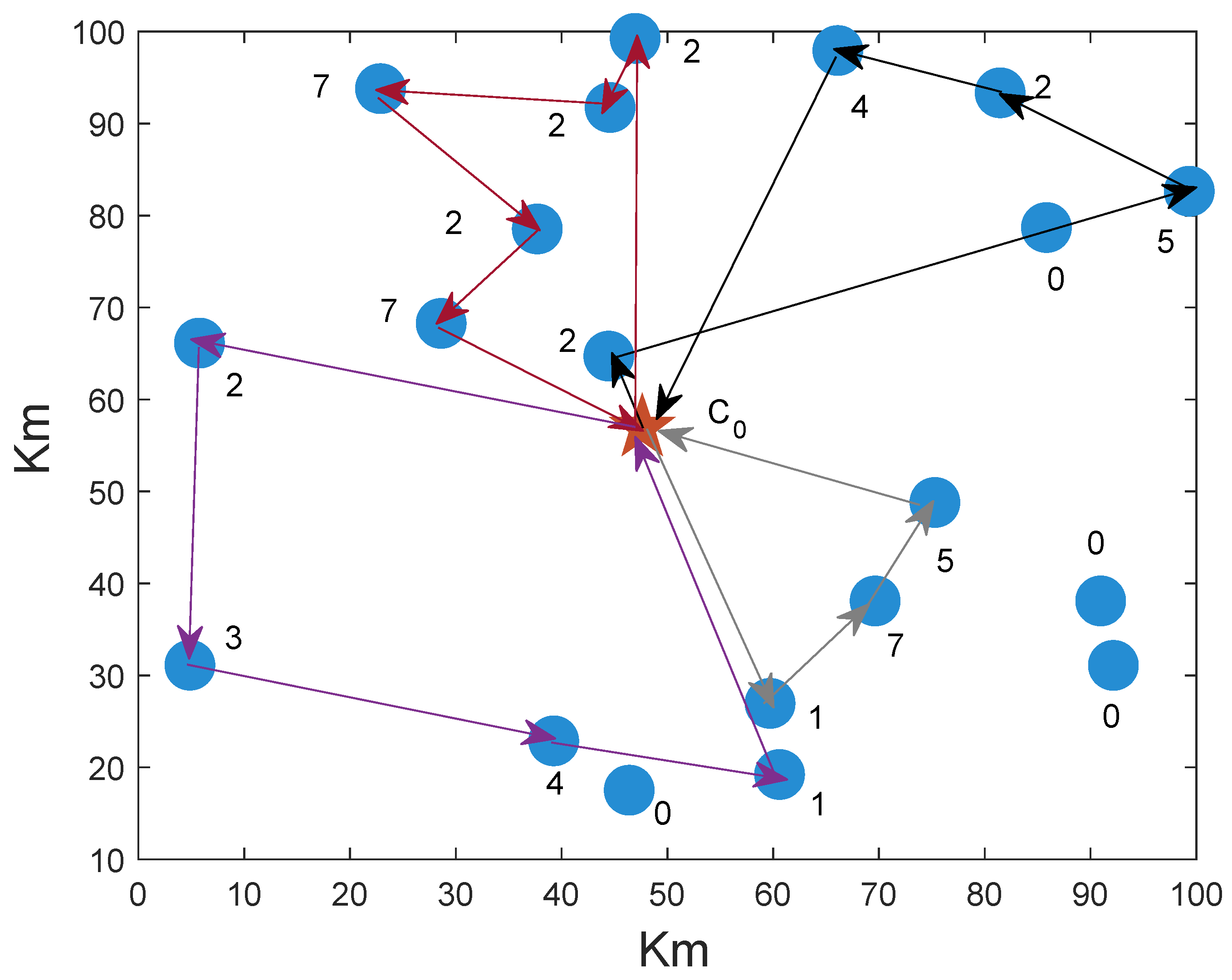
4.1. Solution for MORE
4.1.1. Relabelling Customers
| Algorithm 1 General Algorithm for MORE. |
|
4.1.2. Primary Customers Assignment
4.1.3. Extended Customers Assignment
4.1.4. Finding Delivery Trips
| Algorithm 2 Algorithm for Determining Delivery Trips. |
|
4.2. Theoretical Analysis for MORE
| Algorithm 3 Algorithm for splitting customers into the individual delivery trip. |
|
5. MORE with Time Window Constraint for Customers
5.1. Problem Definition for MORE-TW
5.2. Solution for MORE-TW
| Algorithm 4 General Algorithm for MORE-TW. |
|
6. Simulation Results
6.1. Simulation Setup
6.2. Baseline Setup
6.3. Performance Comparison for MORE
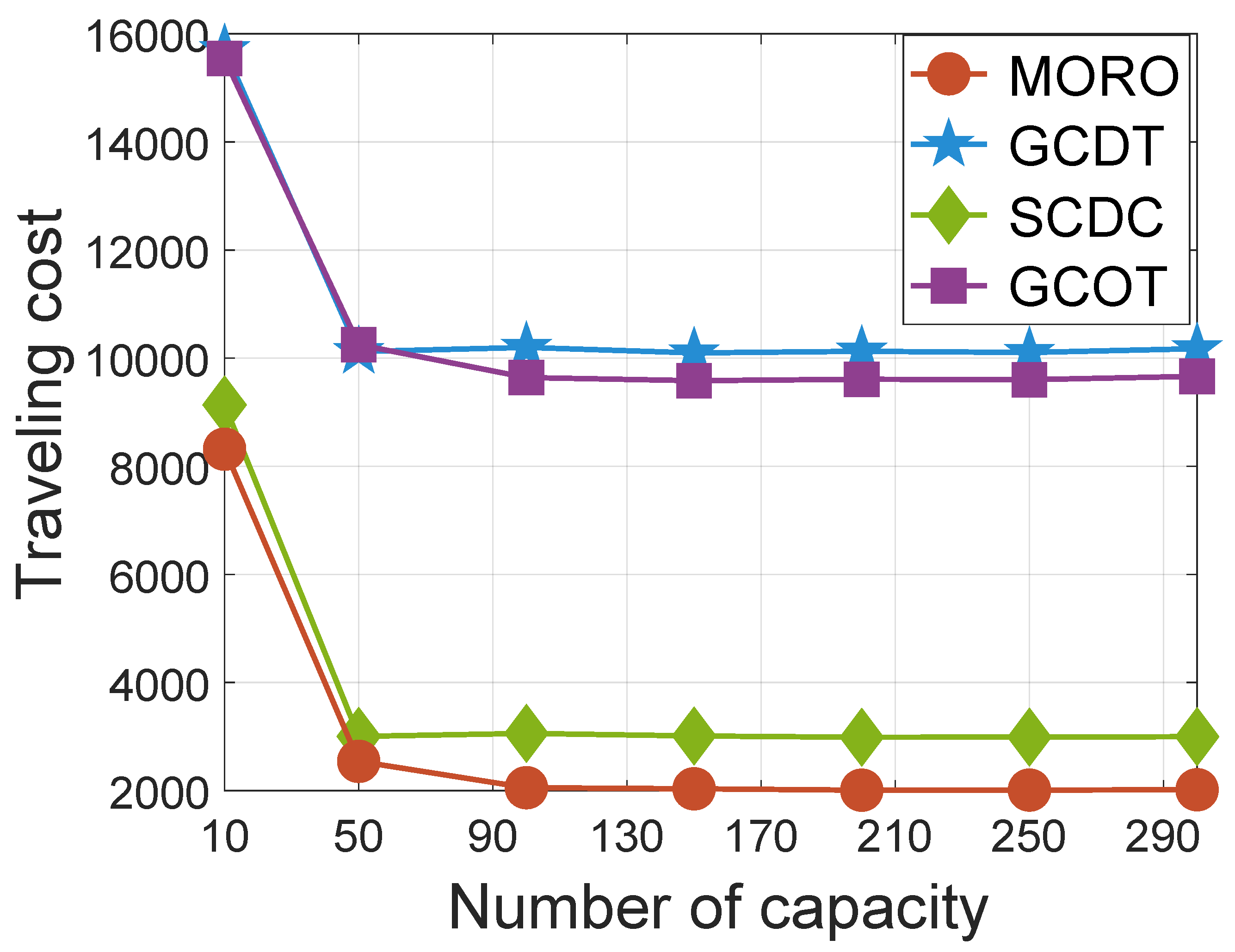
6.3.1. Impact of Drone Capacity Q
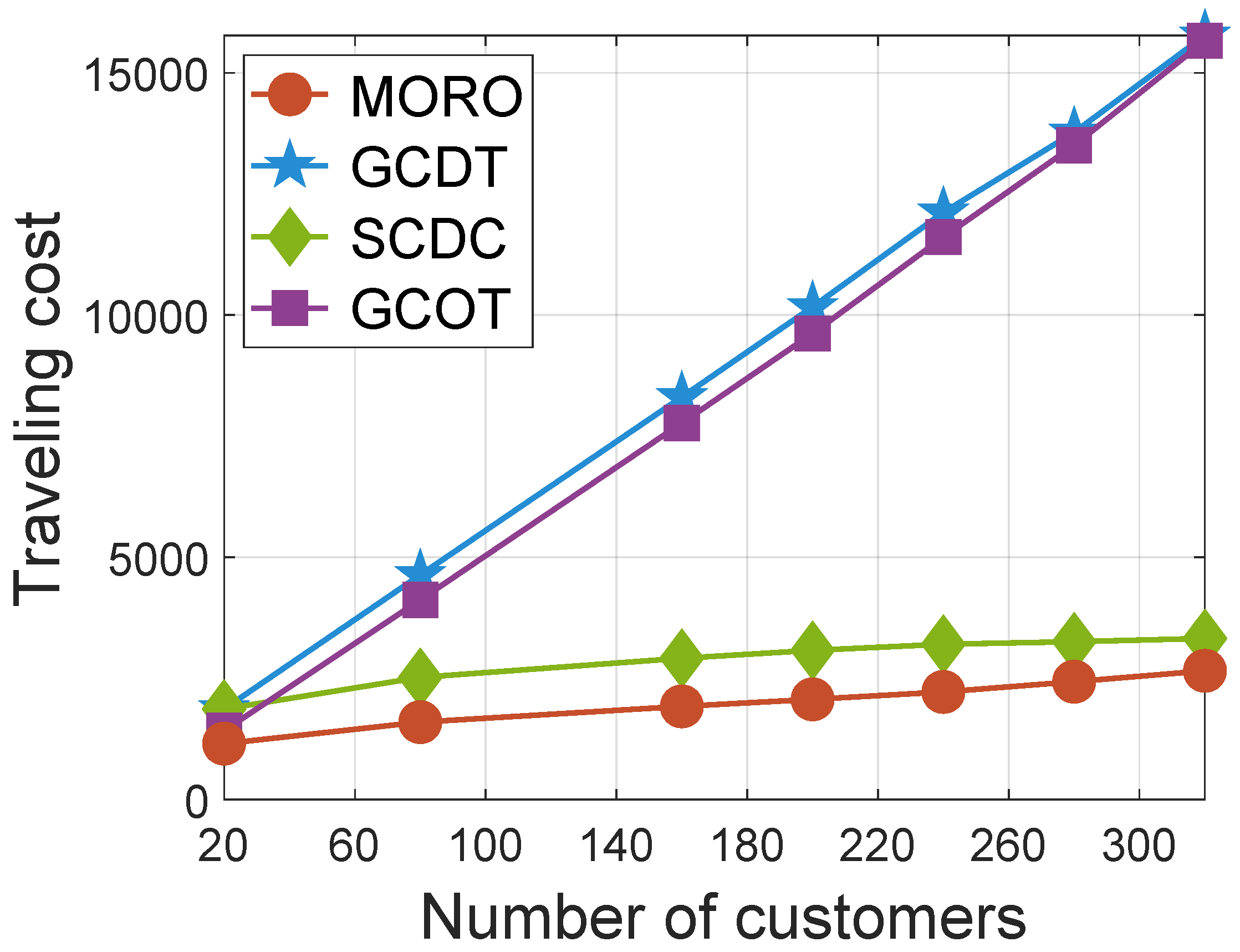
6.3.2. Impact of Number of Customers n
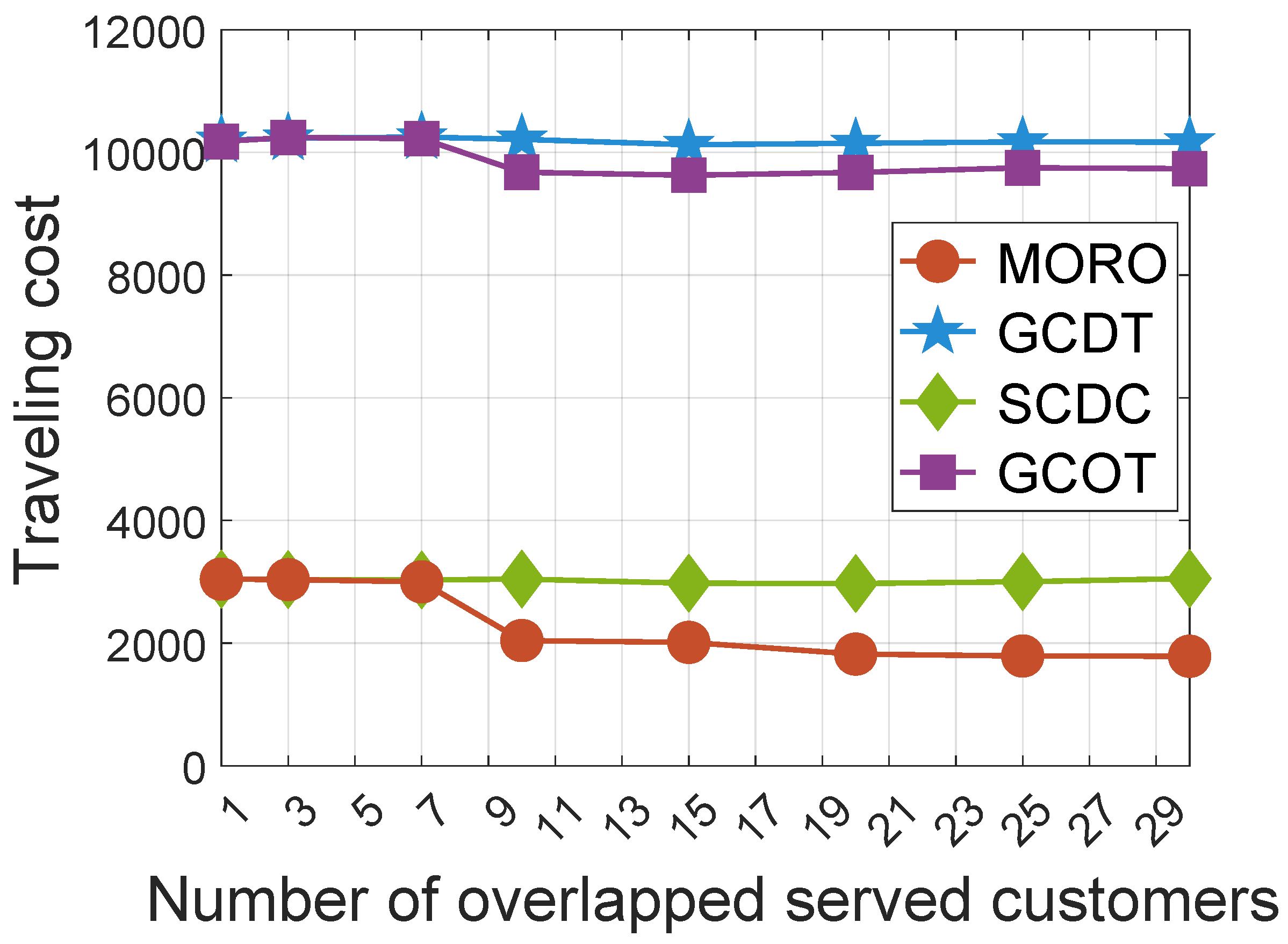
6.3.3. Impact of Number of Overlapped Served Customers k
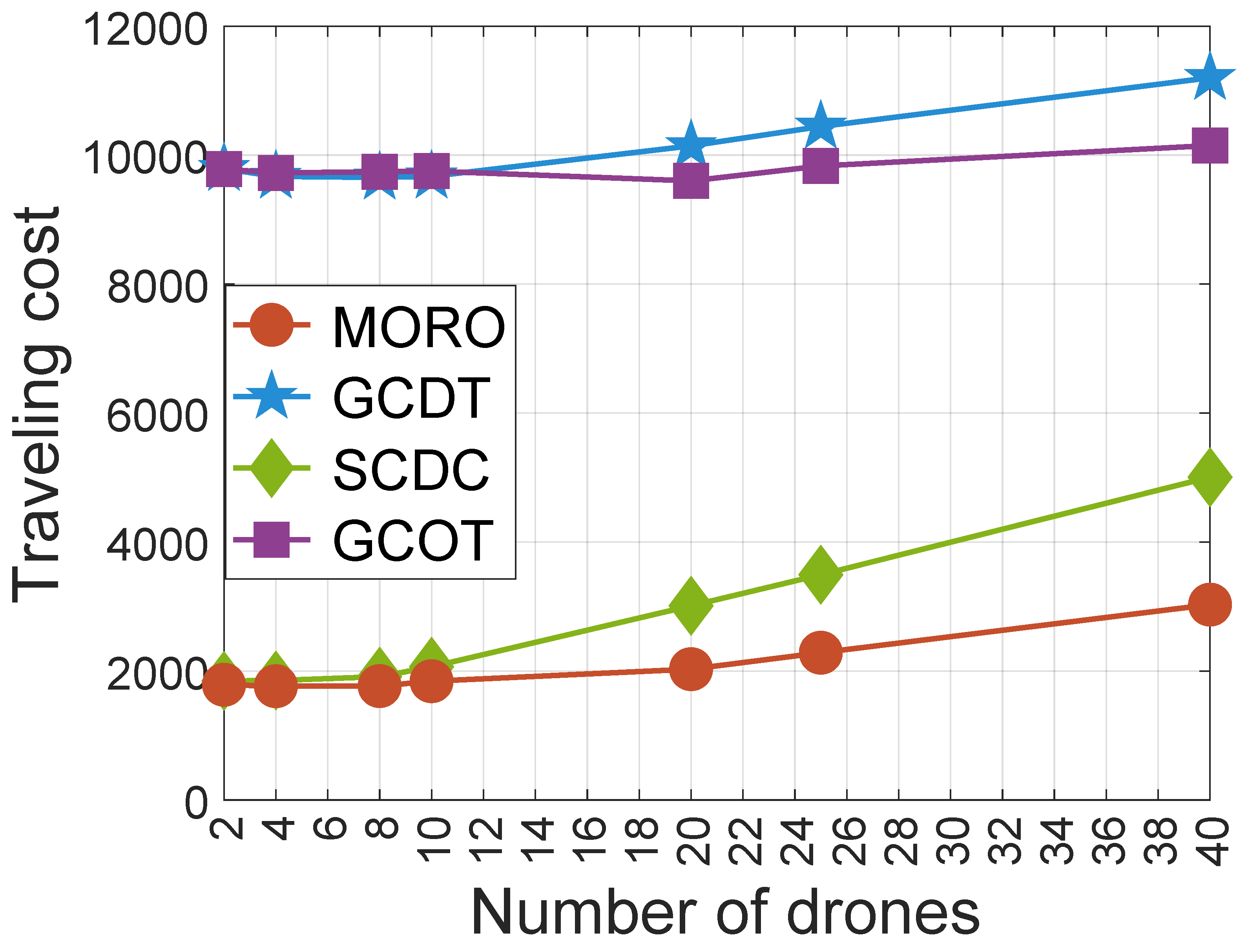
6.3.4. Impact of Number of Drones m
7. Limitation
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Commercial Drone Market Size. Available online: https://www.grandviewresearch.com/industry-analysis/global-commercial-drones-market (accessed on 25 May 2023).
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 459–474. [Google Scholar] [CrossRef]
- Rao Mogili, U.M.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Restas, A. Drone Applications for Supporting Disaster Management. World J. Eng. Technol. 2015, 3, 316–321. [Google Scholar] [CrossRef]
- Emmanouil, N.; Eleni, B.; Vlahogianni, I.; Golias, J.C. Unmanned Aerial Aircraft Systems for transportation engineering: Current practice and future challenges. Int. J. Transp. Sci. Technol. 2016, 5, 111–121. [Google Scholar]
- Thiels, C.A.; Aho, J.; Zietlow, A.; Jenkins, D. Use of unmanned aerial vehicles for medical product transport. Air Med. J. 2015, 34, 104–108. [Google Scholar] [CrossRef]
- Shraim, H.; Awada, A.; Youness, R. A survey on quadrotors: Configurations, modeling and identification, control, collision avoidance, fault diagnosis and tolerant control. Transp. Res. Procedia 2018, 33, 14–33. [Google Scholar] [CrossRef]
- Sutheerakul, C.; Kronprasert, N.; Kaewmoracharoen, M.; Pichayapan, P. Application of Unmanned Aerial Vehicles to Pedestrian Traffic Monitoring and Management for Shopping Streets. IEEE Aerosp. Electron. Syst. Mag. 2017, 25, 1717–1734. [Google Scholar] [CrossRef]
- Mark, C.T.; Liu, J. Unmanned Aircraft System Applications in Construction. Procedia Eng. 2017, 196, 167–175. [Google Scholar]
- Chao, C.; He, X.; Jiang, M. Route adptive fusion for UAVs based on dynamic programing. Command. Inf. Syst. Technol. 2022, 13, 35–41. [Google Scholar]
- Wang, J.; Sun, R. GPS/Beidou combined high accuracy positioning method for urban drones. Command. Inf. Syst. Technol. 2022, 13, 23–26. [Google Scholar]
- Wang, W.; Dai, H.; Dong, C.; Xiao, F.; Zheng, J.; Cheng, X.; Chen, G. Deployment of Unmanned Aerial Vehicles for Anisotropic Monitoring Tasks. IEEE Trans. Mob. Comput. 2022, 21, 495–513. [Google Scholar] [CrossRef]
- Wang, W.; Dai, H.; Dong, C.; Cheng, X.; Wang, X.; Yang, P.; Chen, G.; Dou, W. Placement of Unmanned Aerial Vehicles for Directional Coverage in 3D Space. IEEE/ACM Trans. Netw. 2022, 28, 888–901. [Google Scholar] [CrossRef]
- Xiang, C.; Zhou, Y.; Dai, H.; Qu, Y.; He, S.; Chen, C.; Yang, P. Reusing Delivery Drones for Urban Crowdsensing. IEEE Trans. Mob. Comput. 2023, 22, 2972–2988. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Amazon Drone Delivery Was Supposed to Start By 2018. Available online: https://time.com/6093371/amazon-drone-delivery-service/ (accessed on 25 May 2023).
- UPS Flight Forward, CVS to Launch Residential Drone Delivery Service in Florida Retirement Community to Assist in Coronavirus Response. Available online: https://about.ups.com/sg/en/newsroom/press-releases/innovation-driven/ups-flight-forward-cvs-to-launch-residential-drone-delivery-service-in-florida-retirement-community-to-assist-in-coronavirus-response.html (accessed on 25 May 2023).
- Zipline and Intermountain Healthcare Begin Drone Deliveries in the Salt Lake Valley. Available online: https://www.flyzipline.com/press/zipline-and-intermountain-healthcare-begin-drone-deliveries-in-the-salt-lake-valley (accessed on 25 May 2023).
- Drone Package Delivery Market. Available online: https://www.suasnews.com/2021/04/drone-package-delivery-market-worth-39013-million-by-2030-exclusive-report-by-marketsandmarkets (accessed on 25 May 2023).
- Cheng, C.; Adulyasak, Y.; Rousseau, L.-M. Drone routing with energy function: Formulation and exact algorithm. Transp. Res. Part 2020, 139, 364–387. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Geoffrey, G.M.; Magierowski, S. Vehicle Routing Problems for Drone Delivery. IEEE Trans. Syst. Man. Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Troudi, A.; Addouche, S.-A.; Dellagi, S.; El Mhamedi, A. Sizing of the Drone Delivery Fleet Considering Energy Autonomy. Sustainability 2018, 10, 3344. [Google Scholar] [CrossRef]
- Figliozzi, M.A. Lifecycle modeling and assessment of unmanned aerial vehicles (Drones) CO2e emissions. Transp. Res. Part Transp. Environ. 2017, 57, 251–261. [Google Scholar] [CrossRef]
- Joshuah, K.S.; Samaras, V.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. Nat. Commun. 2018, 9, 409. [Google Scholar]
- Kirschstein, T. Comparison of energy demands of drone-based and ground-based parcel delivery services. Transp. Res. Part Transp. Environ. 2020, 409, 102209. [Google Scholar] [CrossRef]
- D’Andrea, R. Guest Editorial Can Drones Deliver? IEEE Trans. Autom. Sci. Eng. 2014, 11, 647–648. [Google Scholar] [CrossRef]
- Huang, H.; Andrey, V.S.; Huang, C. Round Trip Routing for Energy-Efficient Drone Delivery based on a Public Transportation Network. IEEE Trans. Transp. Electrif. 2020, 6, 1368–1376. [Google Scholar] [CrossRef]
- Chase, C.M.; Amanda, G.C. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar]
- Chase, C.M.; Ritwik, R. The multiple flying sidekicks traveling salesman problem: Parcel delivery with multiple drones. Transp. Res. Part C Emerg. Technol. 2020, 110, 368–398. [Google Scholar]
- Ritwik, R.; Chase, M. The multiple flying sidekicks traveling salesman problem with variable drone speeds. Transp. Res. Part C Emerg. Technol. 2020, 120, 102813. [Google Scholar]
- Kitjacharoenchai, P.; Ventresca, M.; Moshref-Javadi, M.; Lee, S.; Jose, M.A.; Tanchoco, P.; Brunese, A. Multiple traveling salesman problem with drones: Mathematical model and heuristic approach. Comput. Ind. Eng. 2019, 129, 14–30. [Google Scholar] [CrossRef]
- Schermer, D.; Moeini, M.; Wendt, O. Algorithms for solving the vehicle routing problem with drones. In Asian Conference on Intelligent Information and Database Systems; Springer International Publishing: Dong Hoi City, Vietnam, 2018; pp. 352–361. [Google Scholar]
- Di Puglia Pugliese, L.; Guerriero, F. Last-Mile Deliveries by Using Drones and Classical Vehicles. In International Conference on Optimization and Decision Science; Springer International Publishing: Sorrento, Italy, 2017; pp. 557–565. [Google Scholar]
- Schermer, D.; Moeini, M.; Wendt, O. A matheuristic for the vehicle routing problem with drones and its variants. Transp. Res. Part D Emerg. Technol. 2019, 106, 166–204. [Google Scholar] [CrossRef]
- Bartholdi, J.J., III; Platzman, L.K.; Collins, R.L.; Warden, W.H., III. A minimal technology routing system for meals on wheels. Interfaces 1983, 13, 1–8. [Google Scholar] [CrossRef]
- Jaillet, P. A priori solution of a traveling salesman problem in which a random subset of the customers are visited. Oper. Res. 1988, 36, 929–936. [Google Scholar] [CrossRef]
- Lei, H.; Laporte, G.; Guo, B. The vehicle routing problem with stochastic demands and split deliveries. Infor Inform. Syst. Res. Oper. Res. 2012, 50, 59–71. [Google Scholar] [CrossRef]
- Ledvina, K.; Qin, H.; Simchi-Levi, D.; Wei, Y. A New Approach for Vehicle Routing with Stochastic Demand: Combining Route Assignment with Process Flexibility. Oper. Res. 2022, 70, 2655–2673. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization Approaches for the Traveling Salesman Problem with Drone. Transp. Sci. 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Bouman, P.; Agatz, M.; Schmidt, M. Dynamic programming approaches for the traveling salesman problem with drone. Networks 2018, 72, 528–542. [Google Scholar] [CrossRef]
- Dayarian, I.; Savelsbergh, M.; Clarke, J.-P. Same-Day Delivery with Drone Resupply. Transp. Sci. 2020, 54, 229–249. [Google Scholar] [CrossRef]
- Carlsson, J.G.; Song, S. Coordinated Logistics with a Truck and a Drone. Manag. Sci. 2017, 64, 4052–4060. [Google Scholar] [CrossRef]
- Ha, Q.M.; Deville, Y.; Pham, Q.D.; Hà, M.H. On the min-cost Traveling Salesman Problem with Drone. Transp. Res. Part C Emerg. Technol. 2018, 86, 597–621. [Google Scholar] [CrossRef]
- Emine, E.S.; Yurek, H.C.; Ozmutlu, F. A decomposition-based iterative optimization algorithm for traveling salesman problem with drone. Transp. Res. Part C Emerg. Technol. 2018, 91, 249–262. [Google Scholar]
- Campbell, J.F.; Corberan, A.; Plana, I.; Sanchis, J.M. Drone arc routing problems. Networks 2018, 72, 543–559. [Google Scholar] [CrossRef]
- Poikonen, S.; Golden, B. The mothership and drone routing problem. INFORMS J. Comput. 2020, 32, 249–262. [Google Scholar] [CrossRef]
- Pasha, J.E.; Purkayastha, Z.; Fathollahi-Fard, S.; Amir, M.; Ge, Y.-E.; Lau, Y.-Y.; Dulebenets, M.A. The drone scheduling problem: A systematic state-of-the-art review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 1–24. [Google Scholar] [CrossRef]
- Raivi, A.M.; Huda, S.A.; Alam, M.M.; Moh, S.A. Drone Routing for Drone-Based Delivery Systems: A Review of Trajectory Planning, Charging, and Security. Sensors 2023, 23, 1463. [Google Scholar] [CrossRef] [PubMed]
- Gu, R.; Yang, L.; Mark, P. Dynamic truck–drone routing problem for scheduled deliveries and on-demand pickups with time-related constraints. Transp. Res. Part C Emerg. Technol. Sens. 2023, 151, 1–25. [Google Scholar] [CrossRef]
- Andy, M.H. Integrated scheduling of m-truck, m-drone, and m-depot constrained by time-window, drop-pickup, and m-visit using constraint programming. Transp. Res. Part C Emerg. Technol. 2018, 91, 1–14. [Google Scholar]
- Sorbelli, F.B.; Corò, F.; Palazzetti, L.; Pinotti, C.M.; Rigonin, G. How the Wind Can Be Leveraged for Saving Energy in a Truck-Drone Delivery System. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4038–4049. [Google Scholar] [CrossRef]
- Xia, Y.; Zeng, W.; Zhang, C.; Yang, H. A branch-and-price-and-cut algorithm for the vehicle routing problem with load-dependent drones. Transp. Res. Part Methodol. 2023, 171, 80–110. [Google Scholar] [CrossRef]
- Sorbelli, F.B.; Cristina, M.P.; Rigonin, G. On the Evaluation of a Drone-Based Delivery System on a Mixed Euclidean-Manhattan Grid. IEEE Trans. Intell. Transp. Syst. 2023, 24, 1276–1287. [Google Scholar] [CrossRef]
- Liu, B.; Ni, W.; Liu, R.P.; Guo, Y.J.; Zhu, H. Optimal Routing of Unmanned Aerial Vehicle for Joint Goods Delivery and In-Situ Sensing. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3594–3599. [Google Scholar] [CrossRef]
- Lee, S.; Hong, D.; Kim, J.; Baek, D.; Chang, N. Congestion-Aware Multi-Drone Delivery Routing Framework. IEEE Trans. Veh. Technol. 2022, 71, 9384–9396. [Google Scholar] [CrossRef]
- Kong, F.; Li, J.; Jiang, B.; Wang, H.; IEEE; Song, H. Trajectory Optimization for Drone Logistics Delivery via Attention-Based Pointer Network. IEEE Trans. Intell. Transp. Syst. 2022, 24, 4519–4531. [Google Scholar] [CrossRef]
- Alan, L.E.; Juan, C.; Morales, C.; Savelsbergh, M. The vehicle routing problem with stochastic demand and duration constraints. Transp. Sci. 2010, 44, 473–492. [Google Scholar]
- Gendreau, M.; Jabali, O.; Rei, W. Future Research Directions in Stochastic Vehicle Routing. Transp. Sci. 2016, 50, 1163–1173. [Google Scholar] [CrossRef]
- Secomandi, N.; Margot, F. Reoptimization Approaches for the Vehicle-Routing Problem with Stochastic Demands. Oper. Res. 2009, 57, 214–230. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| i- customer | |
| i- taking off (landing) point | |
| j- drone | |
| Number of customers, drones | |
| Q | Drone capacity |
| Distance between and | |
| Demand for j- customer | |
| Delivery trip set for i- drone | |
| Traveling cost function for i- drone | |
| Primary serving customer set for i- drone | |
| Extended serving customer set for i- drone | |
| K | Number of overlapped serving customers |
| Remaining capacity after serving primary customers | |
| Amount of demand in primary serving customer set | |
| Staring time of time window for j- customer | |
| Ending time of time window for j- customer |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, N.; Dong, B.; Qu, Y.; Zhang, M.; Wang, Y.; Dai, H.; Yao, C. Drones Routing with Stochastic Demand. Drones 2023, 7, 362. https://doi.org/10.3390/drones7060362
Yu N, Dong B, Qu Y, Zhang M, Wang Y, Dai H, Yao C. Drones Routing with Stochastic Demand. Drones. 2023; 7(6):362. https://doi.org/10.3390/drones7060362
Chicago/Turabian StyleYu, Nan, Bin Dong, Yuben Qu, Mingwei Zhang, Yanyan Wang, Haipeng Dai, and Changhua Yao. 2023. "Drones Routing with Stochastic Demand" Drones 7, no. 6: 362. https://doi.org/10.3390/drones7060362