

Path Planning of Autonomous Mobile Robots Based on an Improved Slime Mould Algorithm

Abstract
:1. Introduction
2. Related Work
3. Overview of the SMA
- Approach food stage
- Wrap food stage
- Oscillation stage
4. Path Planning Based on the LRSMA
4.1. Elite Learning Strategy Based on Variable Neighborhood Lévy Flight
4.2. Tolerance-Based Rotation Perturbation Mutation Mechanism of Slime Mold Individuals
4.3. Elite Simulated Annealing Strategy
4.4. Fitness Function Construction
4.5. Path-Planning Process Based on the LRSMA
| Algorithm 1 LRSMA pseudocode | |
| 1: | Initialize the population |
| 2: | while it < no. of iterations do |
| 3: | for each slime mold individual do |
| 4: | Calculate the fitness of each slime mold individual |
| 5: | Calculate the local best by Equation (4) |
| 6: | end for |
| 7: | Update the local and global best by Equation (7) |
| 8: | If then |
| 9: | Update a portion of the population individuals by Equation (4) |
| 10: | Update the global by annealing algorithm |
| 11: | end if |
| 12: | Update the population |
| 13: | end while |
5. Simulation Results and Analysis
5.1. Experimental Environment
5.2. Parameter Setting
5.3. Simulation Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronyms | Definitions |
| 3D | 3-Dimension |
| AMR | Autonomous Mobile Robot |
| ACO | Ant Colony Optimization |
| DRONE | Dynamic Remotely Operated Navigation Equipment |
| GA | Genetic Algorithm |
| GWO | Gray Wolf Optimization |
| LRSMA | Lévy Flight-Rotation Slime Mould Algorithm |
| MBO | Monarch Butterfly Optimization |
| NISI | Naturally Inspired Swarm Intelligence |
| PSO | Particle Swarm Optimization |
| QPSO | Quantum-behaved Particle Swarm Optimization |
| RRT | Rapidly-Exploring Random Tree |
| SIA | Swarm Intelligence Algorithm |
| SMA | Slime Mould Algorithm |
| WOA | Whale Optimization Algorithm |
References
- Cui, P.; Yan, W.; Cui, R.; Yu, J.; Ju, Z. Smooth path planning for robot docking in unknown environment with obstacles. Complex 2018, 2018, 4359036. [Google Scholar] [CrossRef] [Green Version]
- Zhao, M.; Lu, H.; Yang, S.; Guo, Y.; Guo, F. A fast robot path planning algorithm based on bidirectional associative learning. Comput. Ind. Eng. 2021, 155, 107173. [Google Scholar] [CrossRef]
- Patle, B.K.; Babu L, G.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Barraquand, J.; Langlois, B.; Latombe, J.-C. Numerical potential field techniques for robot path planning. In Proceedings of the Fifth International Conference on Advanced Robotics 'Robots in Unstructured Environments, Pisa, Italy, 19–22 June 1991; Volume 1012, pp. 1012–1017. [Google Scholar]
- Hao, K.; Zhao, J.; Yu, K.; Li, C.; Wang, C. Path planning of mobile robots based on a multi-population migration genetic algorithm. Sensors 2020, 20, 5873. [Google Scholar] [CrossRef] [PubMed]
- Mu, Y.; Li, B.; An, D.; Wei, Y. Three-dimensional route planning based on the beetle swarm optimization algorithm. IEEE Access. 2019, 7, 117804–117813. [Google Scholar] [CrossRef]
- Wang, H.J.; Fu, Z.J.; Zhou, J.J.; Fu, M.Y.; Ruan, L. Cooperative collision avoidance for unmanned surface vehicles based on improved genetic algorithm. Ocean Eng. 2021, 222, 25. [Google Scholar] [CrossRef]
- Ajeil, F.H.; Ibraheem, I.K.; Sahib, M.A.; Humaidi, A.J. Multi-objective path planning of an autonomous mobile robot using hybrid PSO-MFB optimization algorithm. Appl. Soft Comput. 2020, 89, 106076. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Wang, H.P. A novel A* method fusing bio-inspired algorithm for mobile robot path planning. Eai Endorsed Trans. S 2022, 9, 12. [Google Scholar] [CrossRef]
- Feng, Y.H.; Deb, S.; Wang, G.G.; Alavi, A.H. Monarch butterfly optimization: A comprehensive review. Expert Syst. Appl. 2021, 168, 11. [Google Scholar] [CrossRef]
- Dai, Y.; Yu, J.; Zhang, C.; Zhan, B.; Zheng, X. A novel whale optimization algorithm of path planning strategy for mobile robots. Appl. Intell. 2022. [Google Scholar] [CrossRef]
- Luo, J.; Liu, Z.W. Novel grey wolf optimization based on modified differential evolution for numerical function optimization. Appl. Intell. 2020, 50, 468–486. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Y.J.; Li, Y.F. Mobile robot path planning based on improved localized particle swarm optimization. IEEE Sens. J. 2021, 21, 6962–6972. [Google Scholar] [CrossRef]
- Zhang, Y.; Gong, D.-W.; Zhang, J.-H. Robot path planning in uncertain environment using multi-objective particle swarm optimization. Neurocomputing 2013, 103, 172–185. [Google Scholar] [CrossRef]
- Wu, L.; Huang, X.D.; Cui, J.G.; Liu, C.; Xiao, W.S. Modified adaptive ant colony optimization algorithm and its application for solving path planning of mobile robot. Expert Syst. Appl. 2023, 215, 22. [Google Scholar] [CrossRef]
- Liu, C.; Wu, L.; Huang, X.D.; Xiao, W.S. Improved dynamic adaptive ant colony optimization algorithm to solve pipe routing design. Knowledge-Based Syst. 2022, 237, 13. [Google Scholar] [CrossRef]
- Nakagaki, T.; Yamada, H.; Ueda, T. Interaction between cell shape and contraction pattern in the physarum plasmodium. Biophys. Chem. 2000, 84, 195–204. [Google Scholar] [CrossRef]
- Cai, Z.; Xiong, Z.; Wan, K.; Xu, Y.; Xu, F. A node selecting approach for traffic network based on artificial slime mold. IEEE Access. 2020, 8, 8436–8448. [Google Scholar] [CrossRef]
- Hassan, M.H.; Kamel, S.; Abualigah, L.; Eid, A. Development and application of slime mould algorithm for optimal economic emission dispatch. Expert Syst. Appl. 2021, 182, 28. [Google Scholar] [CrossRef]
- Agarwal, D.; Bharti, P.S. Implementing modified swarm intelligence algorithm based on slime moulds for path planning and obstacle avoidance problem in mobile robots. Appl. Soft Comput. 2021, 107, 107372. [Google Scholar] [CrossRef]
- Naik, M.K.; Panda, R.; Abraham, A. An entropy minimization based multilevel colour thresholding technique for analysis of breast thermograms using equilibrium slime mould algorithm. Appl. Soft Comput. 2021, 113, 107955. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Chakrabortty, R.K.; Ryan, M.J.; Mirjalili, S. An efficient binary slime mould algorithm integrated with a novel attacking-feeding strategy for feature selection. Comput. Ind. Eng. 2021, 153, 107078. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Wang, M.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Dai, X.; Long, S.; Zhang, Z.; Gong, D. Mobile robot path planning based on ant colony algorithm with A* heuristic method. Front. Neurorob. 2019, 13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Szczepanski, R.; Bereit, A.; Tarczewski, T. Efficient local path planning algorithm using artificial potential field supported by augmented reality. Energies 2021, 14, 6642. [Google Scholar] [CrossRef]
- Qi, J.; Yang, H.; Sun, H. Mod-RRT*: A sampling-based algorithm for robot path planning in dynamic environment. IEEE Trans. Ind. Electron. 2021, 68, 7244–7251. [Google Scholar] [CrossRef]
- Chang, Y.-C.; Shi, Y.; Dostovalova, A.; Cao, Z.; Kim, J.; Gibbons, D.; Lin, C.-T. Interpretable fuzzy logic control for multirobot coordination in a cluttered environment. IEEE Trans. Fuzzy Syst. 2021, 29, 3676–3685. [Google Scholar] [CrossRef]
- Qu, H.; Yang, S.X.; Willms, A.R.; Yi, Z. Real-time robot path planning based on a modified pulse-coupled neural network model. IEEE Trans. Neural Netw. 2009, 20, 1724–1739. [Google Scholar] [CrossRef]
- Nazarahari, M.; Khanmirza, E.; Doostie, S. Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Syst. Appl. 2019, 115, 106–120. [Google Scholar] [CrossRef]
- Zhao, Z.; Jin, M.; Lu, E.; Yang, S.X. Path planning of arbitrary shaped mobile robots with safety consideration. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16474–16483. [Google Scholar] [CrossRef]
- Cui, Y.; Hu, W.; Rahmani, A. A reinforcement learning based artificial bee colony algorithm with application in robot path planning. Expert Syst. Appl. 2022, 203, 117389. [Google Scholar] [CrossRef]
- Das, P.K.; Jena, P.K. Multi-robot path planning using improved particle swarm optimization algorithm through novel evolutionary operators. Appl. Soft Comput. 2020, 92, 106312. [Google Scholar] [CrossRef]
- Wang, L.; Kan, J.; Guo, J.; Wang, C. 3D path planning for the ground robot with improved ant colony optimization. Sensors 2019, 19, 815. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Teng, Z.-j.; Lv, J.-l.; Guo, L.-w. An improved hybrid grey wolf optimization algorithm. Soft Comput. 2019, 23, 6617–6631. [Google Scholar] [CrossRef]
- Fernandes, P.B.; Oliveira, R.C.L.; Fonseca Neto, J.V. Trajectory planning of autonomous mobile robots applying a particle swarm optimization algorithm with peaks of diversity. Appl. Soft Comput. 2022, 116, 108108. [Google Scholar] [CrossRef]
- Yu, C.; Heidari, A.A.; Xue, X.; Zhang, L.; Chen, H.; Chen, W. Boosting quantum rotation gate embedded slime mould algorithm. Expert Syst. Appl. 2021, 181, 115082. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Wang, H.-J.; Dao, T.-K.; Pan, J.-S.; Liu, J.-H.; Weng, S. An improved slime mold algorithm and its application for optimal operation of cascade hydropower stations. IEEE Access. 2020, 8, 226754–226772. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; Hassanien, A.E.; Song, D. Chaos-opposition-enhanced slime mould algorithm for minimizing the cost of energy for the wind turbines on high-altitude sites. ISA Trans. 2022, 121, 191–205. [Google Scholar] [CrossRef]
- Houssein, E.H.; Helmy, B.E.-d.; Rezk, H.; Nassef, A.M. An efficient orthogonal opposition-based learning slime mould algorithm for maximum power point tracking. Neural Comput. Appl. 2022, 34, 3671–3695. [Google Scholar] [CrossRef]
- Houssein, E.H.; Mahdy, M.A.; Blondin, M.J.; Shebl, D.; Mohamed, W.M. Hybrid slime mould algorithm with adaptive guided differential evolution algorithm for combinatorial and global optimization problems. Expert Syst. Appl. 2021, 174, 114689. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, S. Unscented sigma point guided quasi-opposite slime mould algorithm and its application in engineering problem. Appl. Res. Comput. 2022, 39, 2709–2716. [Google Scholar] [CrossRef]
- Wang, J.; Elia, N. Distributed averaging under constraints on information exchange: Emergence of lévy flights. IEEE Trans. Automat. Contr. 2012, 57, 2435–2449. [Google Scholar] [CrossRef]
- Mantegna, R.N. Fast, accurate algorithm for numerical simulation of lévy stable stochastic processes. Phys. Rev. E 1994, 49, 4677–4683. [Google Scholar] [CrossRef] [PubMed]
- Hwang, C.-R. Simulated annealing: Theory and applications. Acta Appl. Math. 1988, 12, 108–111. [Google Scholar] [CrossRef]
- Lian, J.; Yu, W.; Xiao, K.; Liu, W. Cubic spline interpolation-based robot path planning using a chaotic adaptive particle swarm optimization algorithm. Math. Probl. Eng. 2020, 2020, 1–20. [Google Scholar] [CrossRef]
- Sang-To, T.; Le-Minh, H.; Mirjalili, S.; Wahab, M.A.; Cuong-Le, T. A new movement strategy of grey wolf optimizer for optimization problems and structural damage identification. Adv. Eng. Softw. 2022, 173, 31. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Start Point | End Point | Obstacle Number | Obstacle Coordinate and Size (x, y, r) | |
|---|---|---|---|---|
| Scenario 1 | [−10, −10] | [10, 10] | 12 | Coordinate x: [−5.3, 7.6, 5.0, 3.5, −4.4, 0.0, −2.9, 0.0, 7.3, −3.6, 0.4, 2.4] Coordinate y: [−6.3, −7.0, 6.1, −1.4, −1.9, 2.6, −5.2, 6, 4.4, 2.3, −3.1, 1.4] Size r: [0.5, 1.0, 1.0, 0.5, 1.0, 1.0, 0.5, 0.5, 0.5, 1.0, 1.0, 1.0] |
| Scenario 2 | [−10, −10] | [10, 10] | 12 | Coordinate x [−2.5, −7.6, 6.7, 6.6, −6.5, 0.0, −2.0, 0.0, 3.5, −3.6, 2.6, 2.4] Coordinate x [−6.4, −7.0, 3.5, −1.1, −1.1, 2.6, −2.2, 6, 7, 2.3, −3.8, 1.4] Size r: [1.0, 1.0, 2.0, 2.0, 1.0, 1.0, 2.0, 0.5, 2.0, 2.0, 1.0, 1.0] |
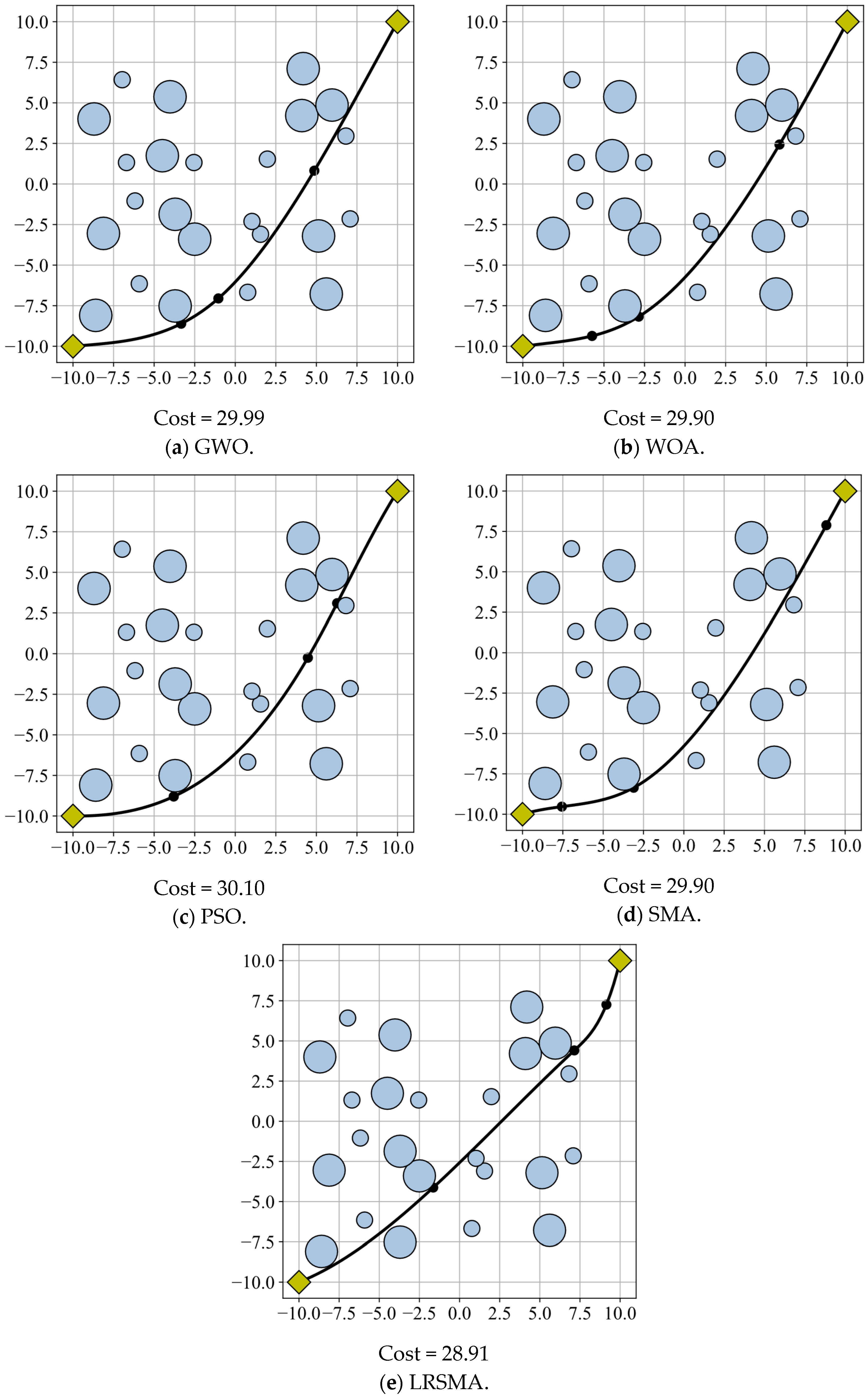
| Scenario 3 | [−10, −10] | [10, 10] | 24 | Coordinate x: [−7.0, −6.7, −2.5, −2.5, 2.0, 1.6, 6.8, 7.1, −6.2, −5.9, 1.0, 0.8, −4.0, 4.2, 4.1, 5.1, 5.6, −3.7, −8.6, −8.1, −8.7, −4.5, −3.7, 6.0] Coordinate y: [−7.0, −6.7, −2.5, −2.5, 2.0, 1.6, 6.8, 7.1, −6.2, −5.9, 1.0, 0.8, −4.0, 4.2, 4.1, 5.1, 5.6, −3.7, −8.6, −8.1, −8.7, −4.5, −3.7, 6.0] Size r: [0.5, 0.5, 0.5, 1.0, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1, 1.0, 1.0, 1.0] |
| Population Size | Iteration Number | Parameter Value | |
|---|---|---|---|
| GWO | 30 | 30 | |
| WOA | 30 | 30 | |
| PSO | 30 | 30 | , , |
| SMA | 30 | 30 | , |
| LRSMA | 30 | 30 | , , |
| Path Length | Planning Time | |||||
|---|---|---|---|---|---|---|
| Minimum | Mean | Standard Deviation | Processing the Best Optimal Path | Mean | ||
| Scenario 1 | GWO | 29.15 | 30.14 | 0.71 | 2.00 | 2.00 |
| WOA | 29.10 | 29.92 | 0.38 | 2.08 | 2.07 | |
| PSO | 29.37 | 30.25 | 0.37 | 1.73 | 1.76 | |
| SMA | 29.10 | 29.88 | 0.62 | 2.02 | 2.01 | |
| LRSMA | 29.11 | 29.81 | 0.55 | 2.16 | 2.18 | |
| Scenario 2 | GWO | 29.13 | 37.23 | 12.75 | 1.95 | 1.97 |
| WOA | 30.51 | 33.43 | 15.70 | 2.08 | 2.09 | |
| PSO | 31.52 | 34.31 | 4.50 | 1.91 | 1.85 | |
| SMA | 31.52 | 32.50 | 1.04 | 1.97 | 1.97 | |
| LRSMA | 29.11 | 32.32 | 0.91 | 2.06 | 2.08 | |
| Scenario 3 | GWO | 30.03 | 42.52 | 22.78 | 2.80 | 2.81 |
| WOA | 29.90 | 37.38 | 93.64 | 3.11 | 3.04 | |
| PSO | 30.10 | 37.61 | 9.46 | 2.81 | 2.68 | |
| SMA | 29.90 | 35.82 | 9.04 | 2.97 | 2.94 | |
| LRSMA | 28.91 | 34.58 | 4.81 | 2.97 | 2.98 | |
| GWO-LRSMA % Change in Minimum | WOA-LRSMA % Change in Minimum | PSO-LRSMA % Change in Minimum | SMA-LRSMA % Change in Minimum | |
|---|---|---|---|---|
| Scenario 1 | 0.14 | −0.03 | 0.82 | −0.03 |
| Scenario 2 | 0.07 | 4.59 | 7.65 | 7.65 |
| Scenario 3 | 3.73 | 3.31 | 3.95 | 3.31 |
| GWO-LRSMA % Change in Mean | WOA-LRSMA % Change in Mean | PSO-LRSMA % Change in Mean | SMA-LRSMA % Change in Mean | |
|---|---|---|---|---|
| Scenario 1 | 1.09 | 0.37 | 1.42 | 0.23 |
| Scenario 2 | 13.19 | 3.32 | 5.80 | 0.55 |
| Scenario 3 | 18.67 | 7.49 | 8.06 | 3.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, L.; Tian, Y.; Wang, H.; Hong, C.; Li, B. Path Planning of Autonomous Mobile Robots Based on an Improved Slime Mould Algorithm. Drones 2023, 7, 257. https://doi.org/10.3390/drones7040257
Zheng L, Tian Y, Wang H, Hong C, Li B. Path Planning of Autonomous Mobile Robots Based on an Improved Slime Mould Algorithm. Drones. 2023; 7(4):257. https://doi.org/10.3390/drones7040257
Chicago/Turabian StyleZheng, Ling, Yan Tian, Hu Wang, Chengzhi Hong, and Bijun Li. 2023. "Path Planning of Autonomous Mobile Robots Based on an Improved Slime Mould Algorithm" Drones 7, no. 4: 257. https://doi.org/10.3390/drones7040257