

Path-Following Control of Small Fixed-Wing UAVs under Wind Disturbance


Abstract
:1. Introduction
2. UAV Modeling and S-Plane Control
2.1. UAV Modeling
2.2. S-Plane Control
3. Controller Design
3.1. GSISM S-Plane Controller and Stability Analysis
3.2. Controller Structure
3.3. GSISM+RBF S-Plane Control Algorithm
| Algorithm 1: GSISM+RBF S-Plane Controller |
| Outer loop input: expected path point . Current location point . GSISM+RBF S-Plane control gain. . Inner loop input: intermediate command signal ,, S-Plane gain ,,,. 1: calculating the error and error change rate through Equations (3) and (4). 2: 3: calculate through Equations (10), (20), and (22) 4: calculate through Equations (23)–(25) 5: calculating and through Equation (26). 6: 7: 8: 9: inner loop return: , 10: 11: outer loop return:,, |
4. Simulation and Results Analysis
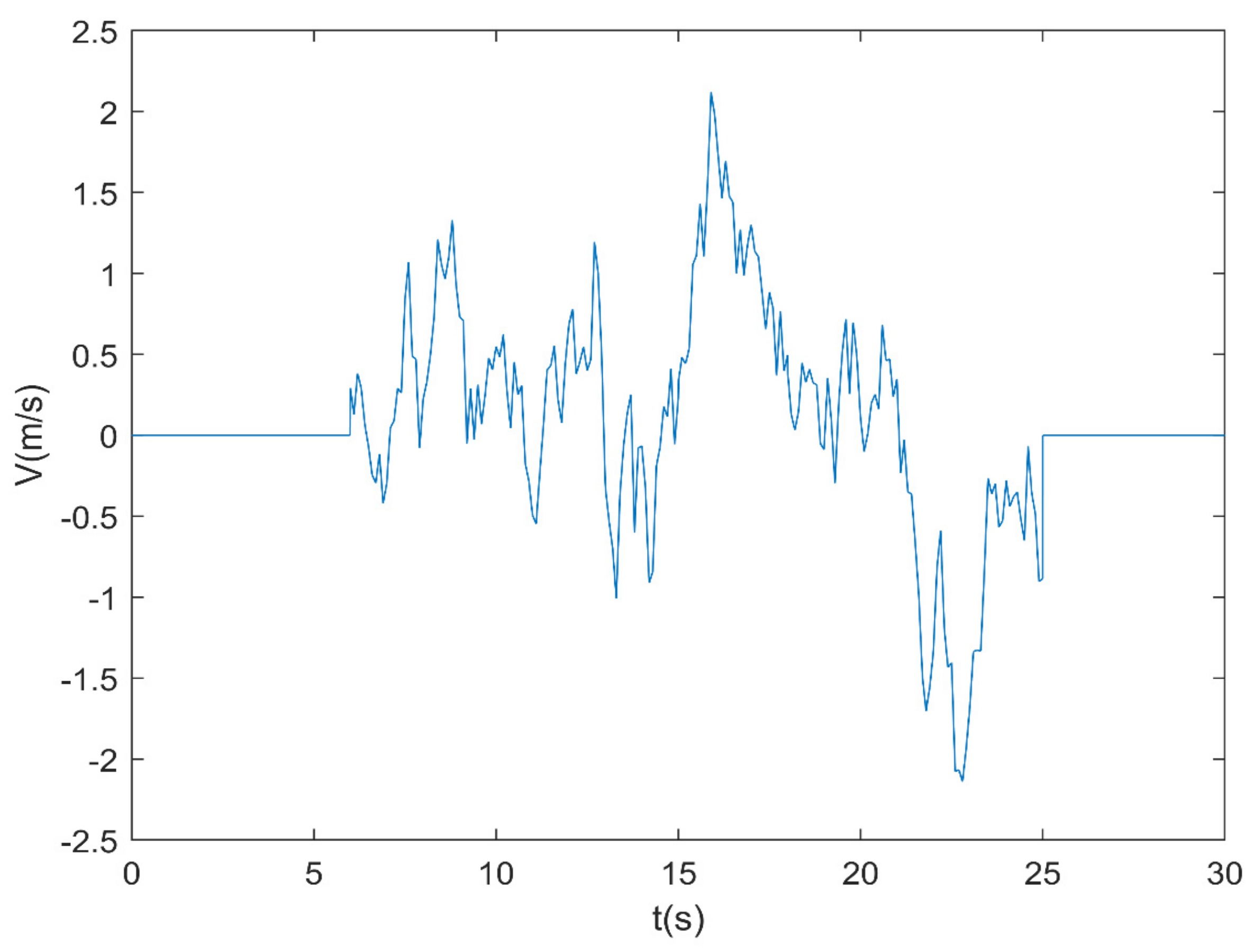
4.1. Wind Disturbance Modeling
- (1)
- Basic Wind
- (2)
- Gust Wind
- (3)
- Gradual Wind
- (4)
- Random Wind
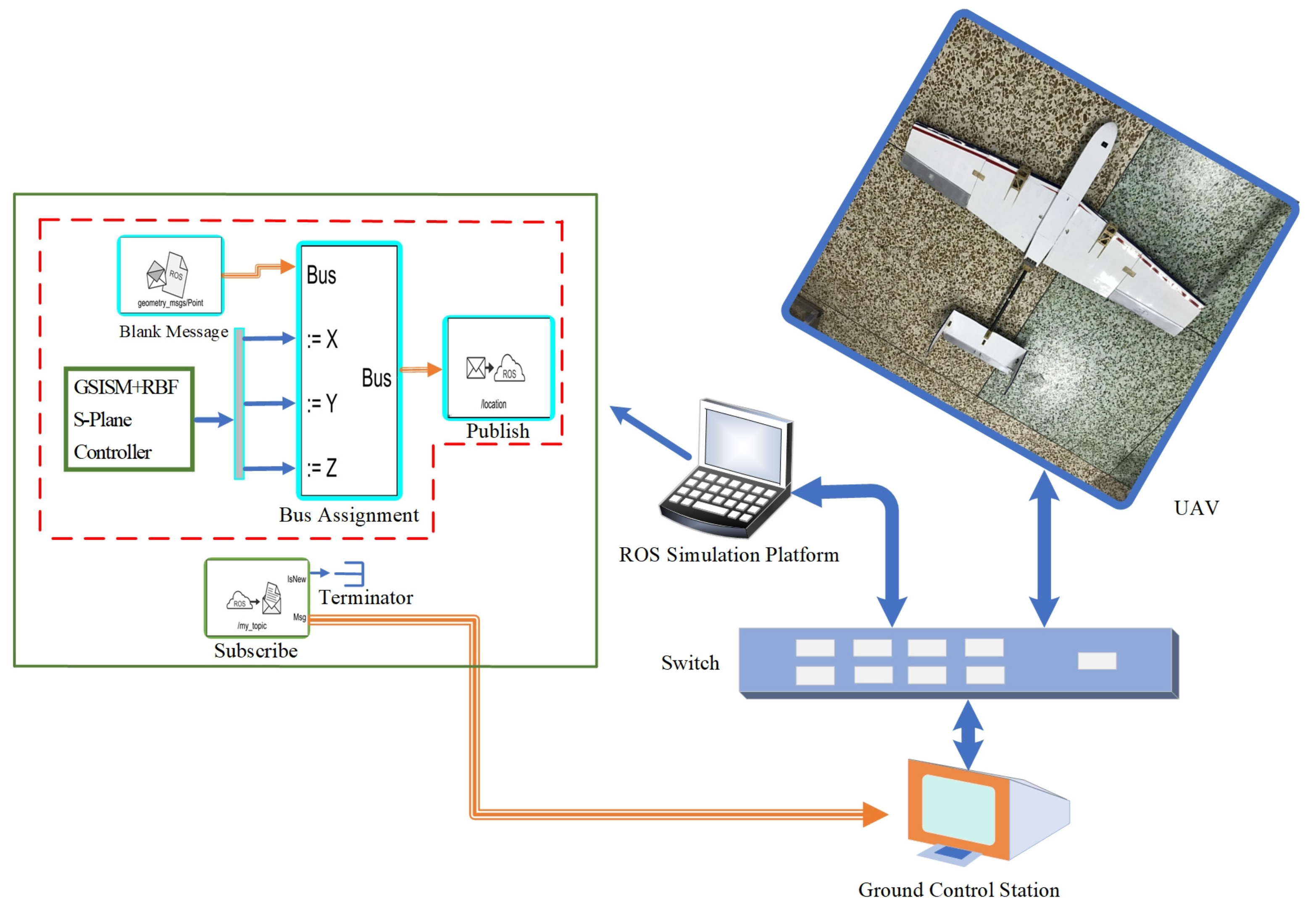
4.2. Semi-Physical Simulation System
4.3. Simulation Test and Results Analysis
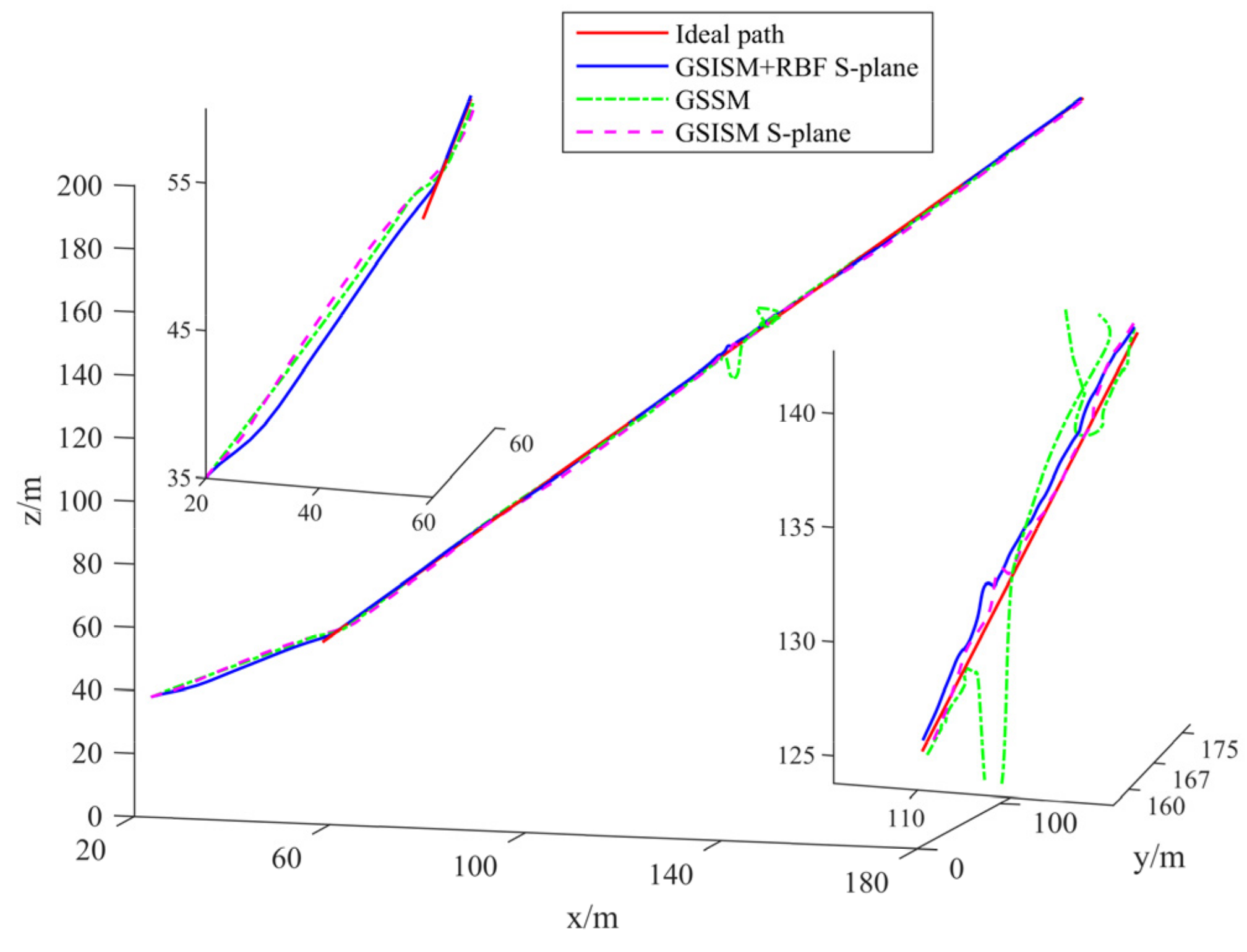
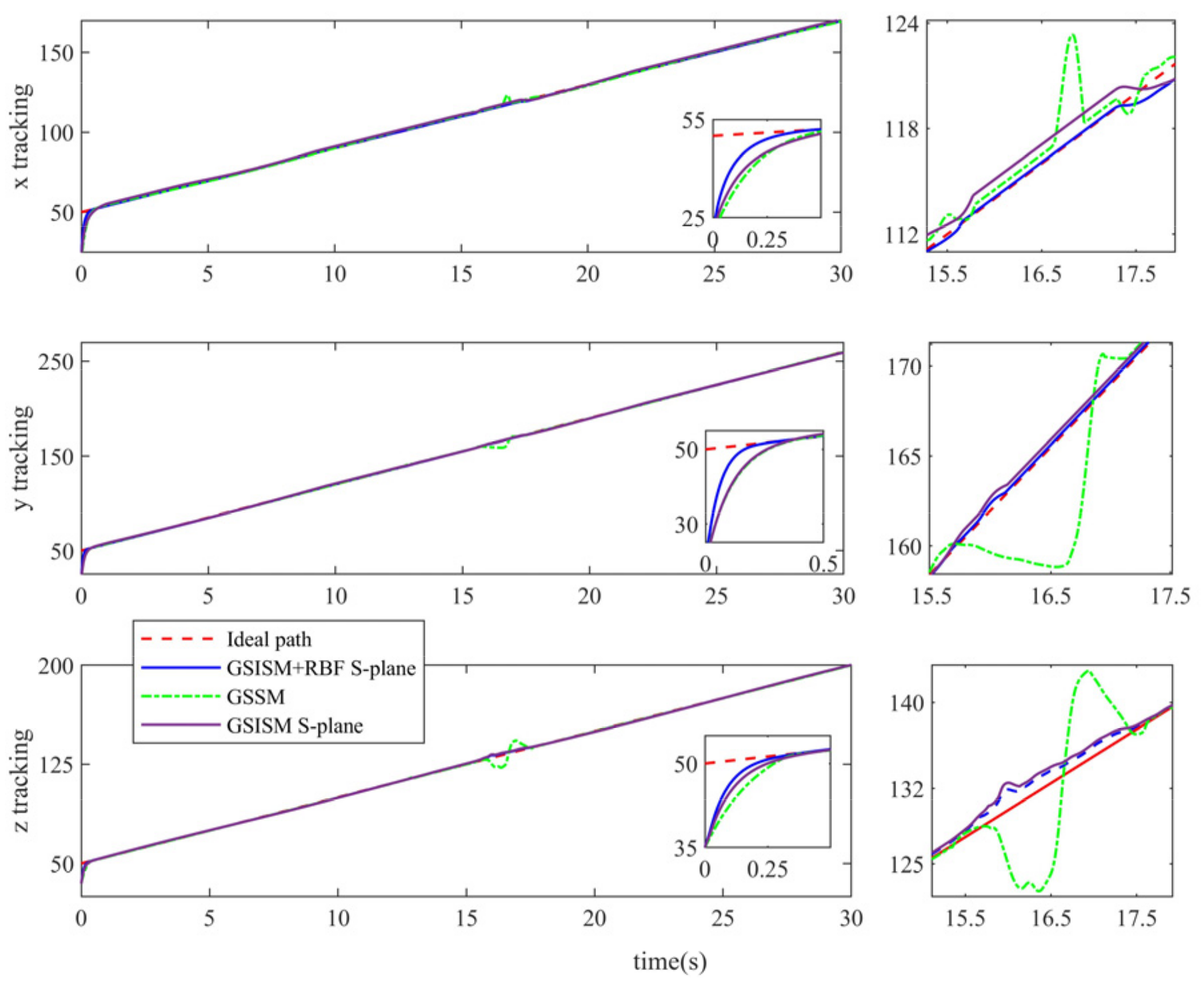
4.3.1. Spatial Straight Line Path-Following Simulation
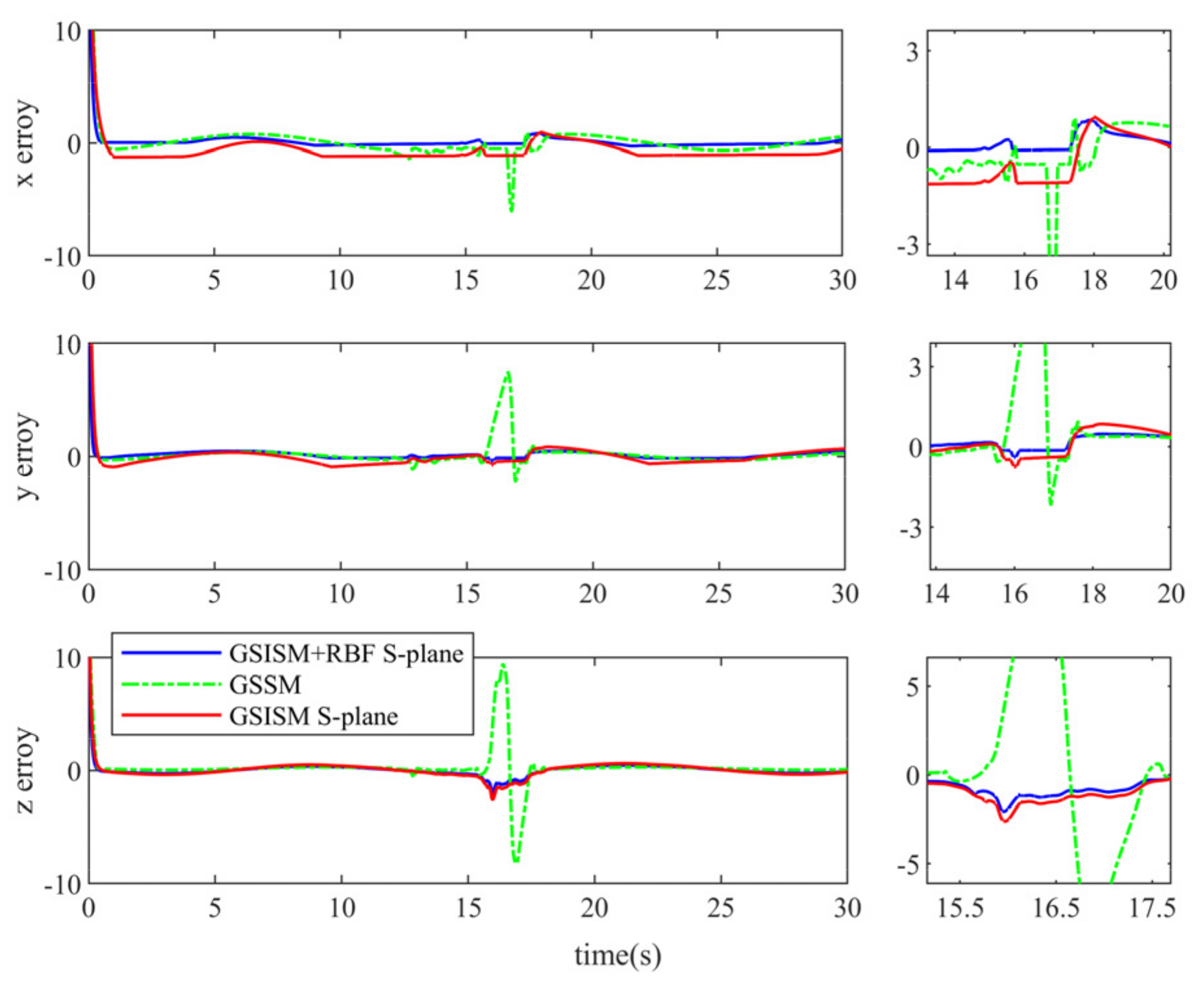
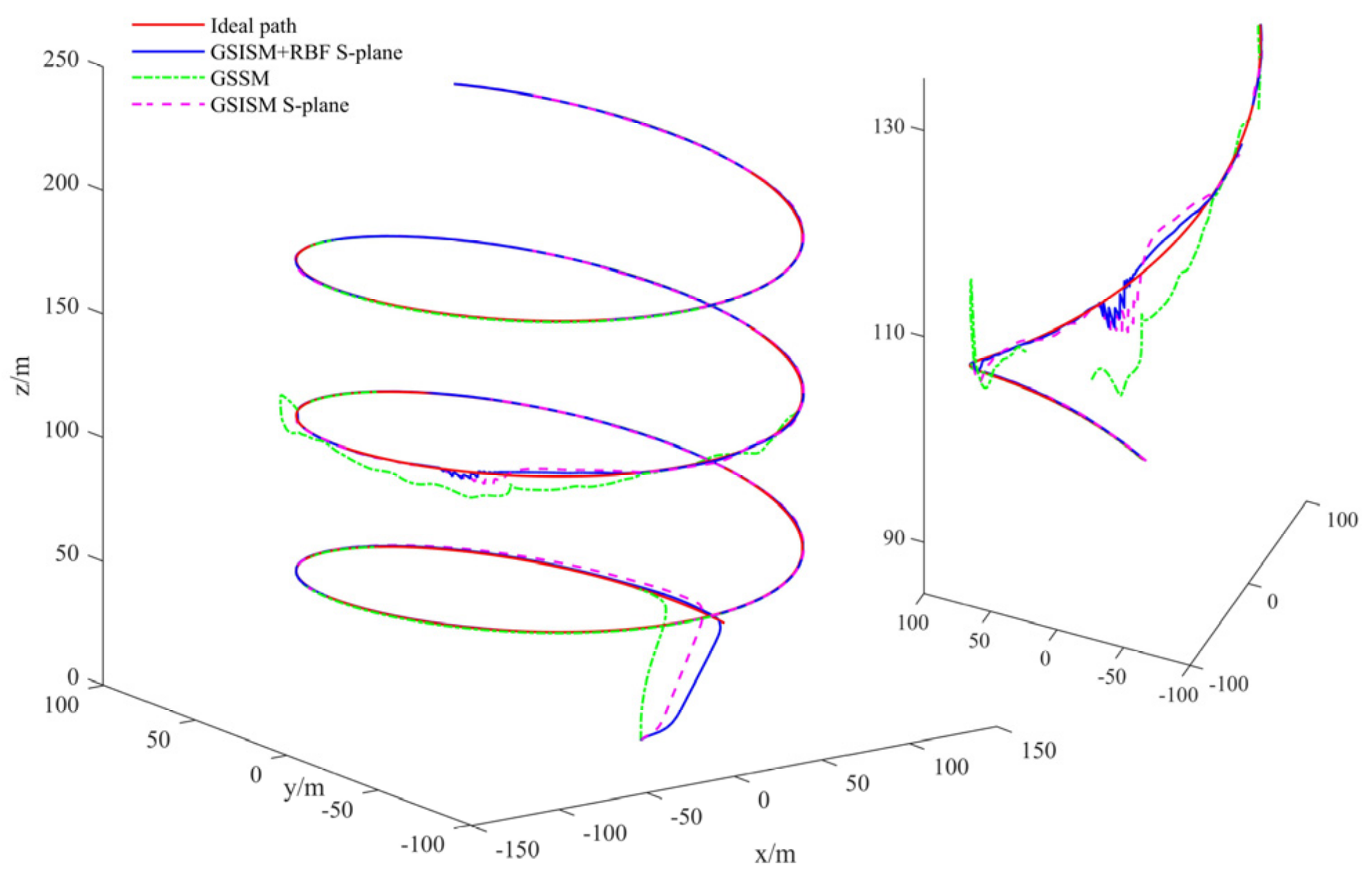
4.3.2. Spiral Line Path following Simulation
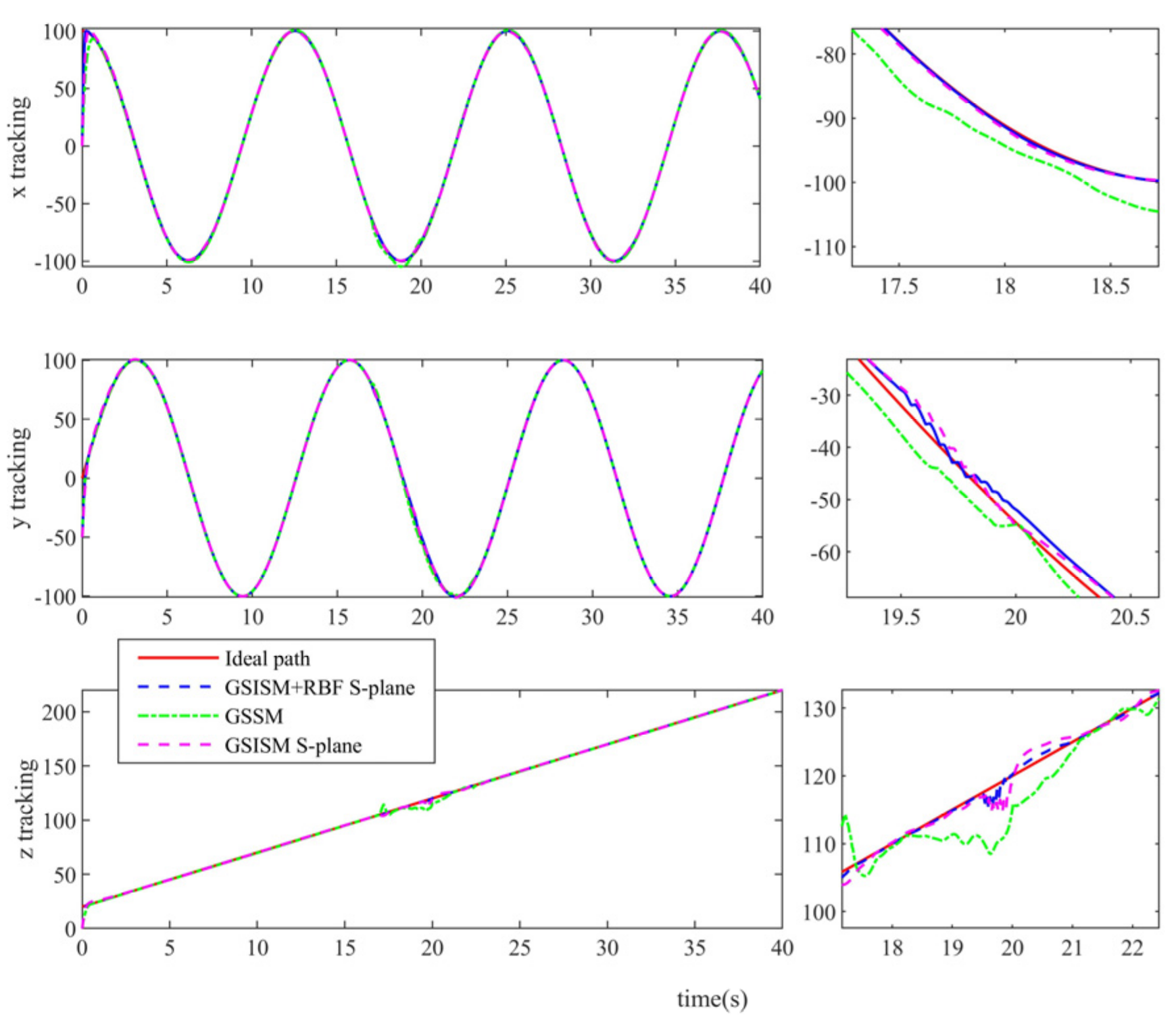
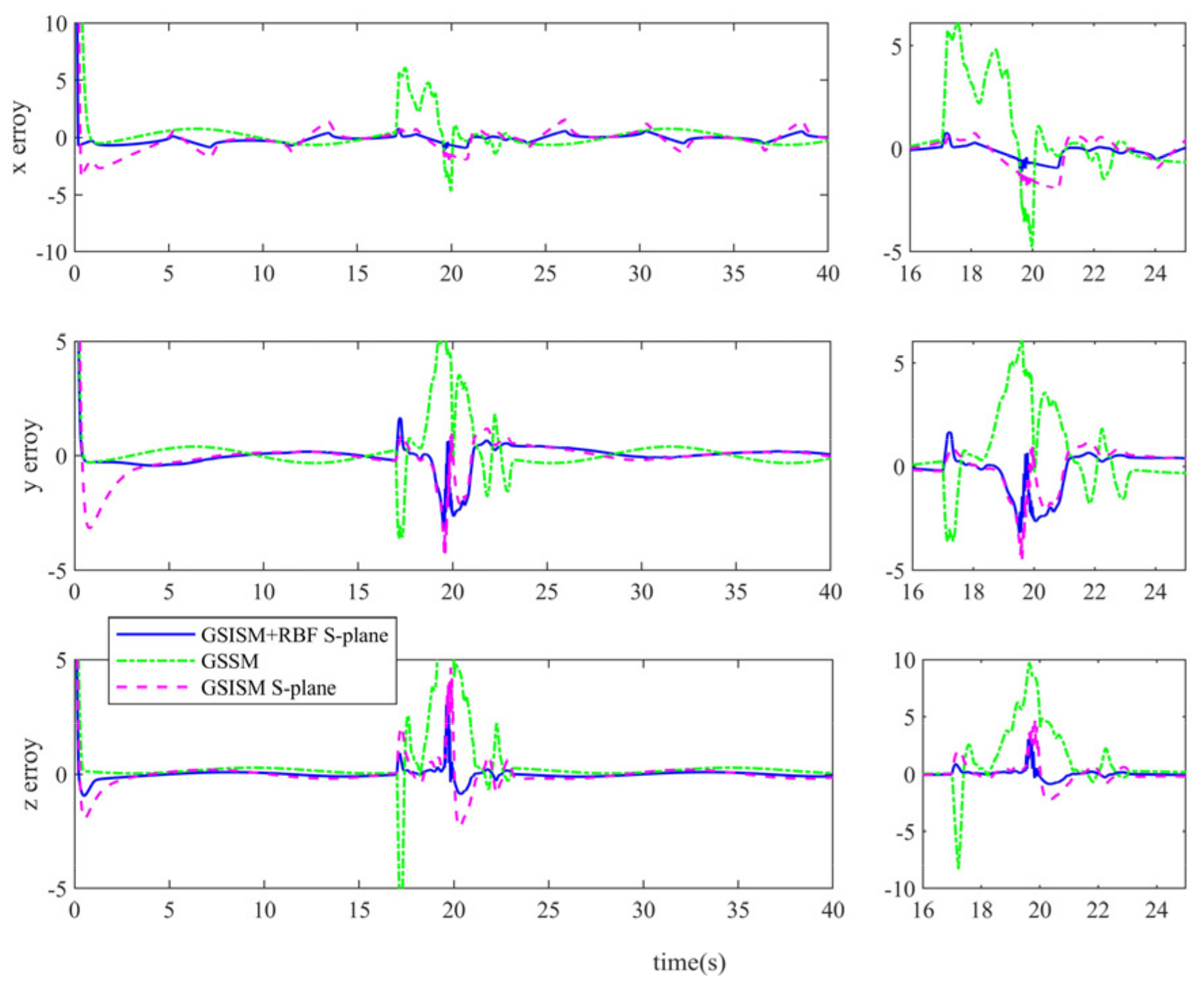
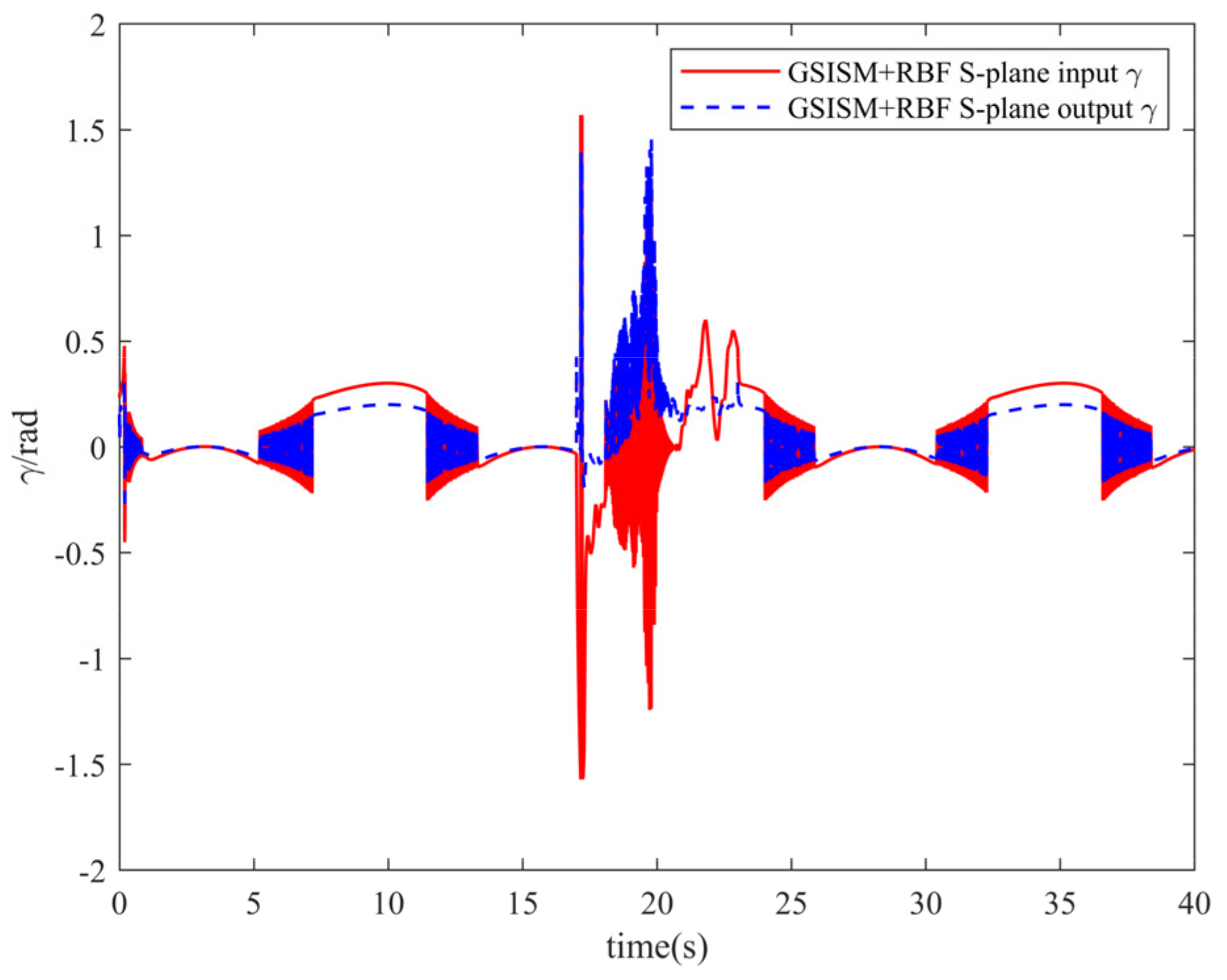
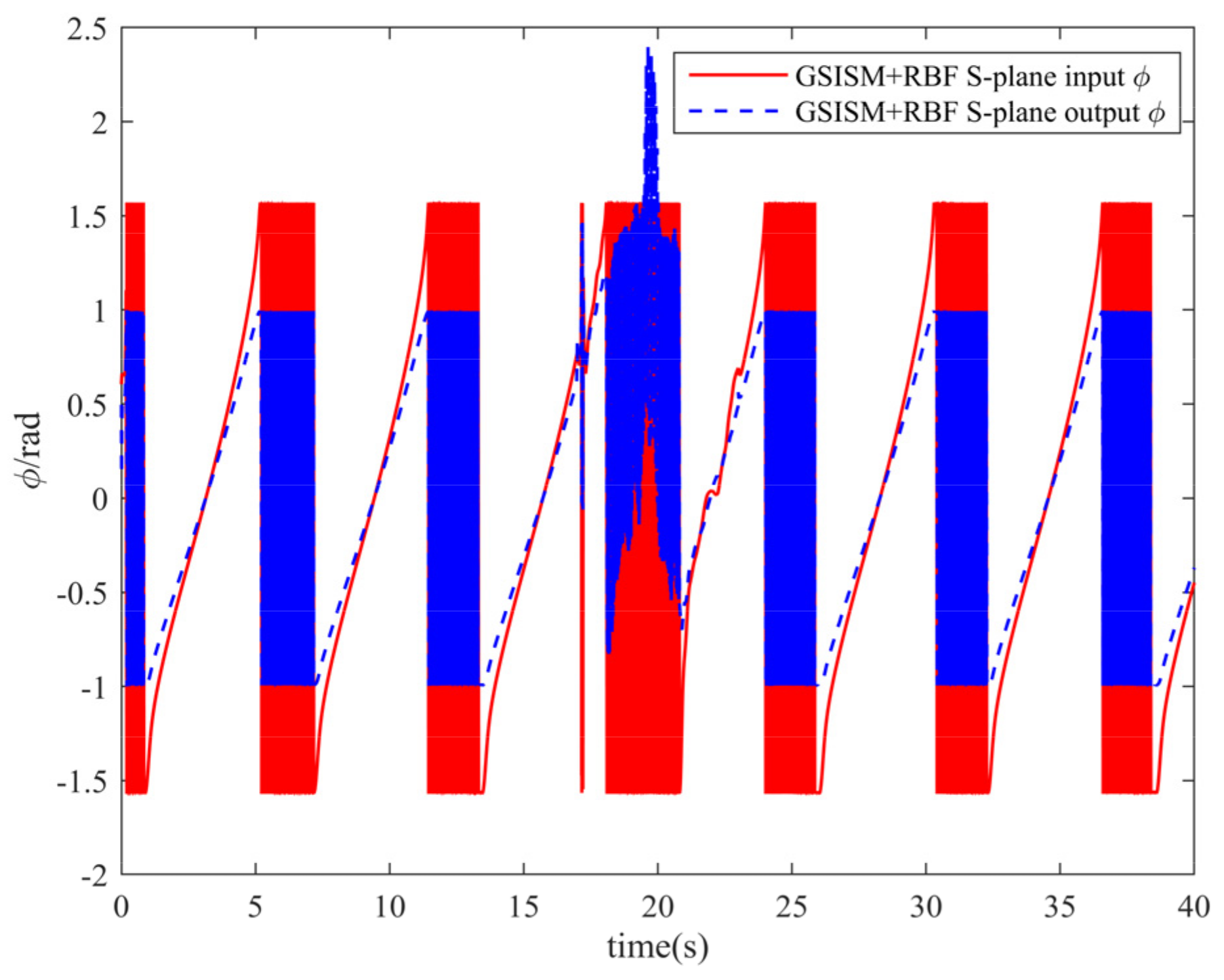
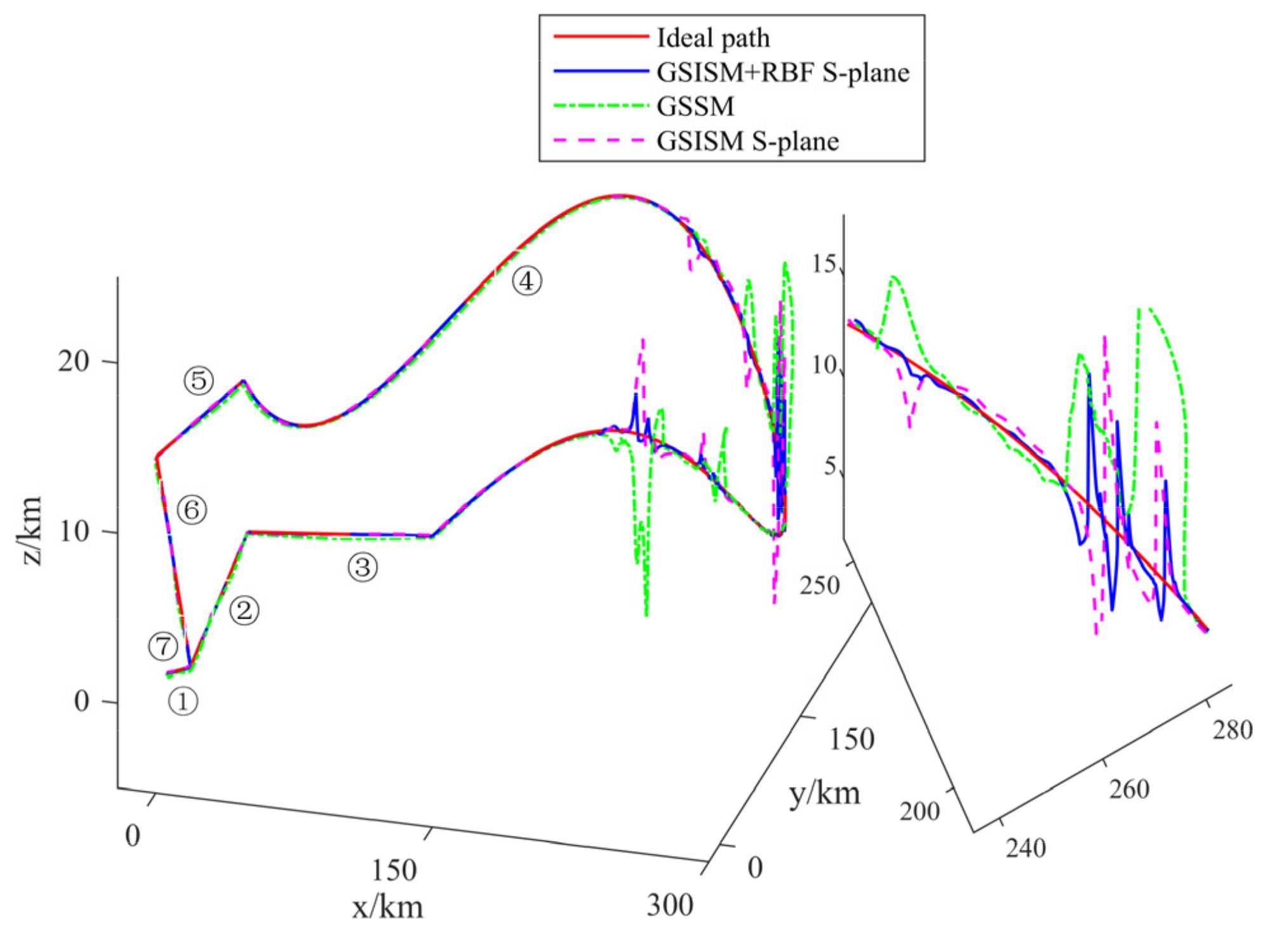
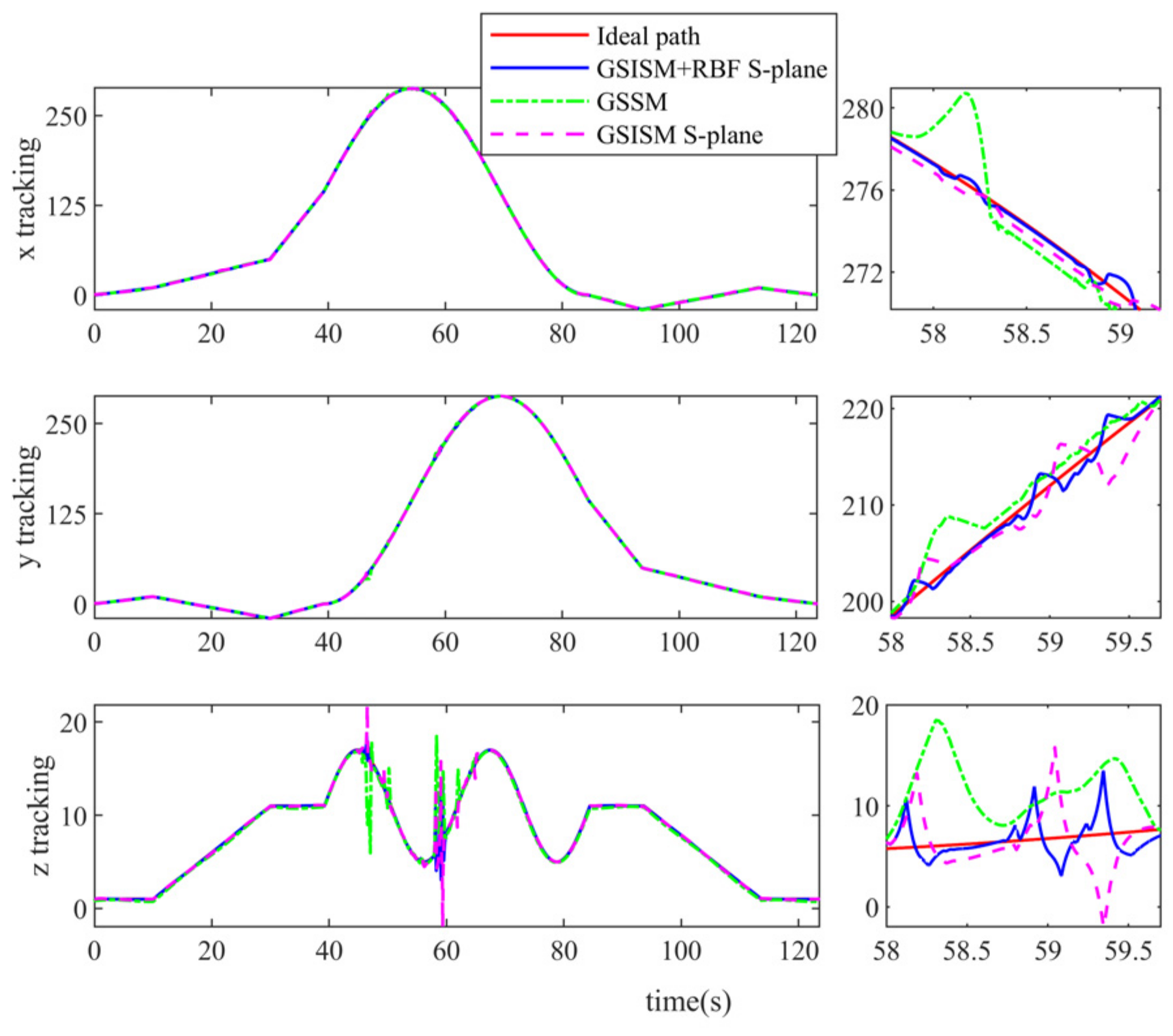
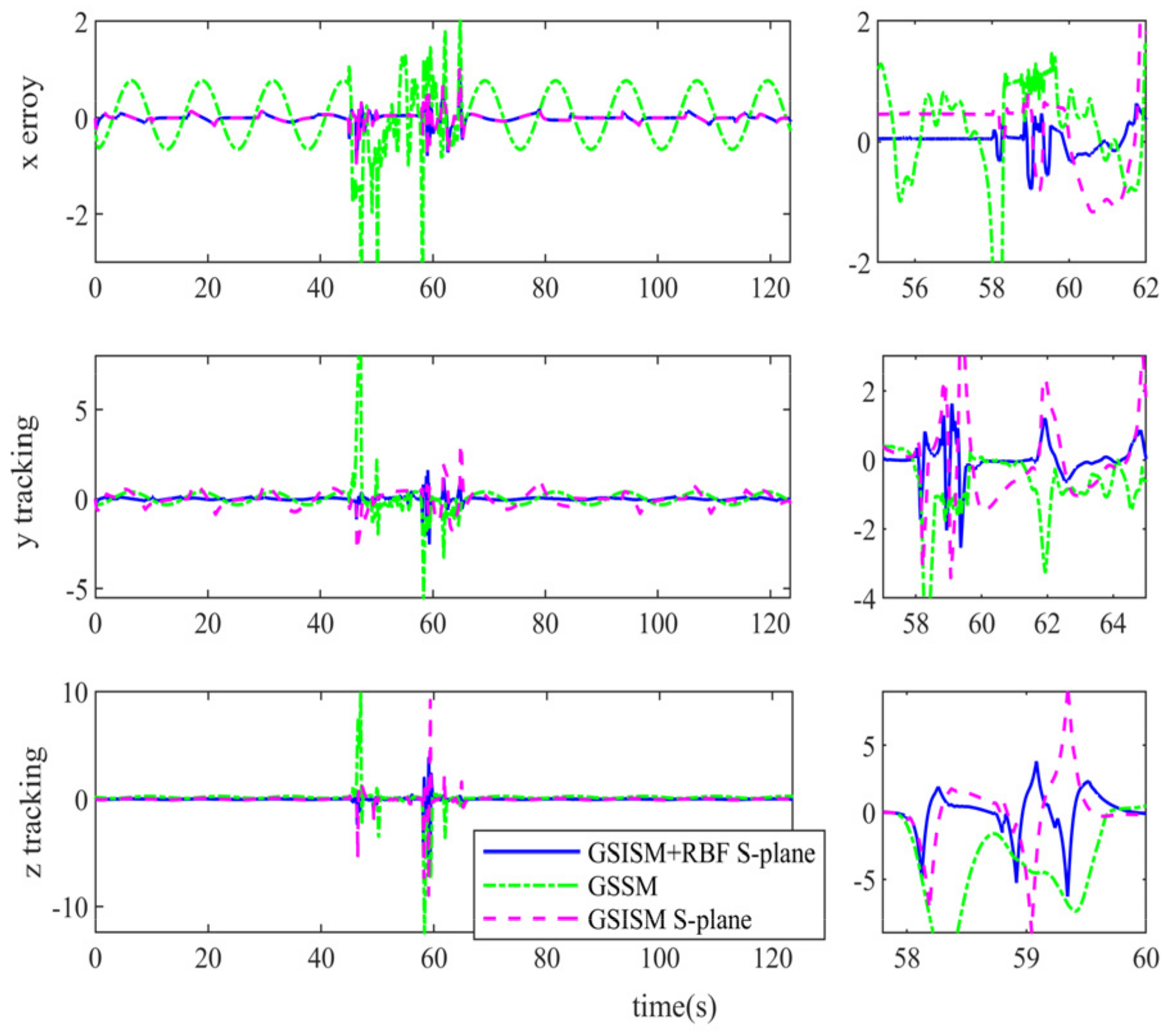
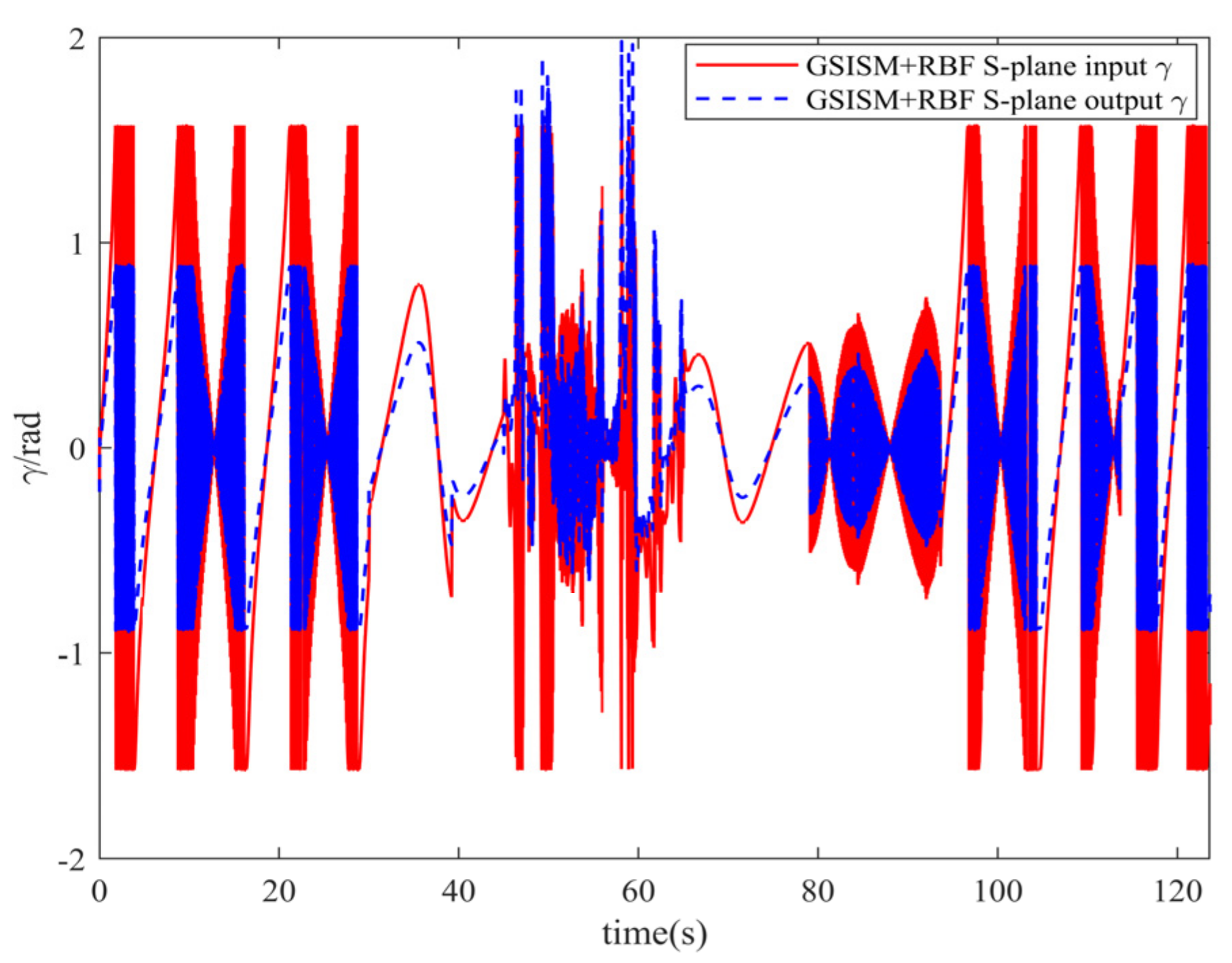
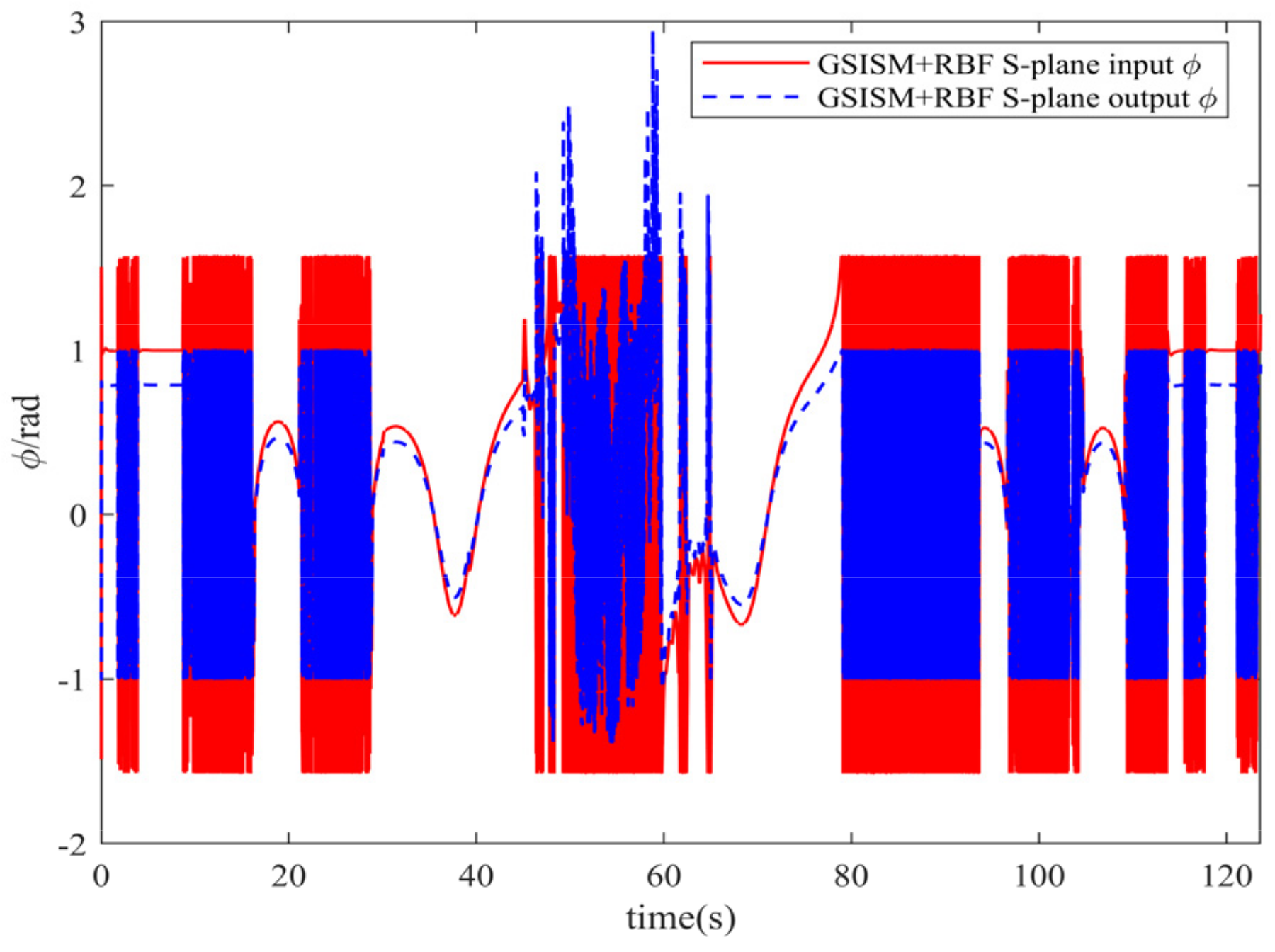
4.3.3. Following Simulation of Special Space Curve
4.3.4. Simulation Results Analysis
5. Conclusions
- (1)
- The proposed controller can track the ideal path with high accuracy and a smooth cut into curved paths; thus, it has good control accuracy and anti-disturbance performance under external wind disturbance;
- (2)
- The proposed controller is based on the inner and outer loop control idea, which has the characteristics of a simple structure, easy realization, and practical application for fixed-wing UAV control;
- (3)
- The S-plane control can adjust the input signal well, and the second-order differentiators have certain advantages in suppressing the integral explosion problem during signal derivation; thus, the proposed controller demonstrates excellent performance in anti-interference.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fari, S.; Wang, X.M.; Roy, S.; Baldi, S. Addressing unmodeled path-following dynamics via adaptive vector field. A UAV test case. IEEE Trant. Aero Elect. System. 2020, 56, 1613–1622. [Google Scholar] [CrossRef]
- Chen, P.Y.; Zhang, G.B.; Guan, T.; Yuan, M.N.; Shen, J. The motion controller based on neural network s-plane model for fixed-wing UAVs. IEEE Access 2021, 9, 93927–93936. [Google Scholar] [CrossRef]
- Sujit, P.B.; Saripalli, S.; Sousa, J.B. Unmanned aerial vehicle path following a survey and analysis of algorithms for fixed-wing unmanned aerial vehicles. IEEE Control Syst. Mag. 2014, 34, 42–59. [Google Scholar]
- Cui, Z.Y.; Wang, Y. Nonlinear adaptive line-of-sight path following control of unmanned aerial vehicles considering sideslip amendment and system constraints. Math. Probl. Eng. 2020, 2020, 4535698. [Google Scholar] [CrossRef] [Green Version]
- Miao, J.M.; Wang, S.P.; Tomovic, M.M.; Zhao, Z.P. Compound line-of-sight nonlinear path following control of underactuated marine vehicles exposed to wind, waves, and ocean currents. Nonlinear Dyn. 2017, 89, 2441–2459. [Google Scholar] [CrossRef]
- Jung, W.; Lim, S.; Lee, D.; Bang, H. Unmanned aircraft vector field path following with arrival angle control. J. Intell. Robot Syst. 2016, 84, 311–325. [Google Scholar] [CrossRef]
- Capello, E.; Guglieri, G.; Ristorto, G. Guidance and control algorithms for mini-UAV autopilots. Aircr. Eng. Aerosp. Technol. 2017, 89, 133–144. [Google Scholar] [CrossRef]
- Christoph, H.; Dirk, A. Model predictive trajectory following for a ground vehicle in a heterogeneous rendezvous with a fixed-wing aircraft. IFAC-PapersOnLine 2020, 53, 15693–15698. [Google Scholar]
- Yang, J.; Liu, C.J.; Coombes, M.; Yan, Y.D.; Chen, W.H. Optimal Path Following for Small Fixed-Wing UAVs Under Wind Disturbances. IEEE Trans. Control. Syst. Technol. 2021, 29, 996–1008. [Google Scholar] [CrossRef]
- Shah, M.Z.; Samar, R.; Bhatti, A.I. Lateral track control of UAVs using the sliding mode approach: From design to flight testing. Trans. Inst. Meas. Control. 2015, 37, 457–474. [Google Scholar] [CrossRef]
- Castaneda, H.; Salas-Pena, O.S.; Leon-Morales, J. Extended observer based on adaptive second order sliding mode control for a fixed wing UAV. ISA Trans. 2017, 66, 226–232. [Google Scholar] [CrossRef]
- Dehghani, M.A.; Menhaj, M.B. Integral sliding mode formation control of fixed-wing unmanned aircraft using seeker as a relative measurement system. Aerosp. Sci. Technol. 2016, 58, 318–327. [Google Scholar] [CrossRef]
- Benkhoud, K.; Bouallègue, S. Dynamics modeling and advanced metaheuristics based LQG controller design for a Quad Tilt Wing UAV. Int. J. Dyn. Control. 2018, 6, 630–651. [Google Scholar] [CrossRef]
- Julian, C.; Bernardo, M.; Fatiha, N. Modeling and adaptive backstepping control for TX-1570 UAV path following. Aerosp. Sci. Technol. 2014, 39, 342–351. [Google Scholar]
- Muslimov, T.Z.; Munasypov, R.A. Consensus-based cooperative control of parallel fixed-wing UAV formations via adaptive backstepping. Aerosp. Sci. Technol. 2021, 109, 106416. [Google Scholar] [CrossRef]
- Whang, I.H.; Cho, S. LQR gain-schedule controller for vertical line following. Electron. Lett. 2010, 46, 991–992. [Google Scholar] [CrossRef]
- Cho, N.; Kim, Y.; Park, S. Three-Dimensional Nonlinear Differential Geometric Path-Following Guidance Law. J. Guid. Control Dyn. 2015, 38, 2366–2385. [Google Scholar] [CrossRef]
- Liu, X.M.; Xu, Y.R. S control of automatic underwater vehicles. Ocean Eng. 2001, 3, 81–84. [Google Scholar]
- Zhao, X.C.; Yuan, M.N.; Cheng, P.Y.; Xin, L.; Yao, L.B. Robust H-infinity/S-plane controller of longitudinal control for UAVs. IEEE Access 2019, 7, 91367–91374. [Google Scholar] [CrossRef]
- Dong, Z.P.; Wan, L.; Song, Y.F.; Li, Y.M. Design of control system for micro-usv based on adaptive expert s plane algorithm. Shipbuild. China 2017, 58, 178–188. [Google Scholar]
- Li, Y.; An, L.; Jiang, Y.Q.; He, J.Y.; Cao, J.; Guo, H.D. Dynamic positioning test for removable of ocean observation platform. Ocean Eng. 2018, 153, 112–121. [Google Scholar] [CrossRef]
- Zhao, S.L.; Wang, X.K.; Zhang, D.B.; Shen, L.C. Curved path following control for fixed-wing unmanned aerial vehicles with control constraint. J. Intell. Robot Syst. 2018, 89, 107–119. [Google Scholar] [CrossRef]
- Brezoescu, A.; Espinoza, T.; Castillo, P.; Lozano, R. Adaptive trajectory following for a fixed-wing UAV in presence of crosswind. J. Intell. Robot Syst. 2013, 69, 257–271. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.M.; Li, Q.; Cheng, N.; Liang, B. Nonlinear path-following method of fixed-wing unmanned aerial vehicles. J. Zhejiang Univ.-Sci. C Comput. Electron. 2013, 14, 125–132. [Google Scholar] [CrossRef]
- Wei, Y.L.; Han, S.X.; Shi, S.Z. The modelling and simulation of the combined wind speed in the wind power system. Renew. Energy Resour. 2010, 28, 18–20. [Google Scholar]
- Lugo-Cárdenas, I.; Salazar, S.; Lozano, R. Lyapunov based 3D path following kinematic controller for a fixed wing UAV. IFAC-PapersOnLine 2017, 50, 15946–15951. [Google Scholar] [CrossRef]
- Ailon, A.; Zohar, I. Controllers for trajectory tracking and string-like formation in Wheeled Mobile Robots with bounded inputs. In Proceedings of the Melecon 2010—2010 15th IEEE Mediterranean Electrotechnical Conference, Wuhan, China, 26–28 April 2010; pp. 1563–1568. [Google Scholar]
- Wang, X.H.; Liu, J.K. Differentiator Design and Application—Signal Filtering and Differentiation; Publishing House of Electronics Industry: Beijing, China, 2010. [Google Scholar]
- Liu, J.K. Sliding Mode Control Design and Matlab Simulation: The Design Method of Advanced Control System; Tsinghua University Press: Beijing, China, 2015. [Google Scholar]
- Cardoso, D.N.; Esteban, S.; Raffo, G.V. A new robust adaptive mixing control for trajectory tracking with improved forward flight of a tilt-rotor UAV. ISA Trans. 2021, 110, 86–104. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| two S-Plane controllers | 4 | 0.01 | 10 | 0.1 |
| RBF function | 15 | 50 | 50 | 50 |
| k1 | k2 | k3 | c1 | c2 | c3 | a1 | p1 | a2 | p2 | a3 | p3 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| spatial straight line | 0.5 | 0.0165 | 0.09 | 3 | 20 | 20 | 40 | 0.2 | 5 | 1.1 | 2 | 0.2 |
| spiral line | 7 | 30 | 30 | 0.20 | 0.3 | 0.3 | 2 | 0.2 | 13.4 | 10 | 2 | 0.2 |
| special spatial curve | 4 | 5 | 9 | 8 | 10 | 15 | 2 | 0.2 | 0.5 | 1.1 | 0.2 | 0.2 |
| t | t | 1 | |
| ) | |||
| GSISM+RBF S-Plane | GSSM | GSISM S-Plane | |
|---|---|---|---|
| Spatial straight line | 0.5 | −1 | −3 |
| Spiral line | −0.8 | −1 | 5 |
| Special space curve | −0.4 | −1.2 | −2 |
| GSISM+RBF S-Plane | GSSM | GSISM S-Plane | |
|---|---|---|---|
| Spatial straight line | −0.4 | −4 | −2.2 |
| Spiral line | 0.5 | −4.8 | −3 |
| Special space curve | 3 | 5 | −4 |
| GSISM+RBF S-Plane | GSSM | GSISM S-Plane | |
|---|---|---|---|
| Spatial straight line | −1.5 | 2 | −5 |
| Spiral line | 5 | 10 | −10 |
| Special space curve | −1.7 | 3 | −9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, P.; Zhang, G.; Li, J.; Chang, Z.; Yan, Q. Path-Following Control of Small Fixed-Wing UAVs under Wind Disturbance. Drones 2023, 7, 253. https://doi.org/10.3390/drones7040253
Chen P, Zhang G, Li J, Chang Z, Yan Q. Path-Following Control of Small Fixed-Wing UAVs under Wind Disturbance. Drones. 2023; 7(4):253. https://doi.org/10.3390/drones7040253
Chicago/Turabian StyleChen, Pengyun, Guobing Zhang, Jiacheng Li, Ze Chang, and Qichen Yan. 2023. "Path-Following Control of Small Fixed-Wing UAVs under Wind Disturbance" Drones 7, no. 4: 253. https://doi.org/10.3390/drones7040253