1. Introduction
Small multi-rotor UAVs have the advantages of good maneuverability, rich expansion functions, and great intelligence potential, but the limited performance of a single aircraft and poor survivability have also been exposed in use [
1]. Swarming can compensate for the weaknesses of a single UAV while further leveraging its strengths [
2]. Currently, UAV swarms have shown great value and potential in missions such as aerial Internet of Things (IoT) [
3,
4], relay communication support [
5,
6], aerial light shows, regional security [
7], and military operations [
8], which have become one of the inevitable trends in the development of UAV applications. Accurate real-time position information is the basis for UAVs to accomplish a variety of air-to-ground missions. In addition to absolute position information, it also involves the relative position relationship between each UAV within a swarm. It is no exaggeration to say that relative location information is no less important than absolute location information from a swarm perspective. It enables UAVs to maintain planned formations, avoid collisions with each other, and accomplish coordinated maneuvers [
9]. Therefore, precise relative localization is a must for swarm UAVs, which is of great significance in reducing the swarm’s reliance on absolute position information and improving the swarm’s ability to survive in hazardous environments.
In recent years, solutions based on various hardware and methods have emerged for relative localization problems. While they show good performance, the different characteristics and conditions of use make many of these solutions inappropriate for small multi-rotor UAV swarms. Currently, the acquisition of relative localization information between UAVs still relies heavily on the absolute position data of each UAV from the Global Navigation Satellite System (GNSS) [
10]. In addition, similar problems exist with relative localization via motion capture systems, simultaneous localization and mapping (SLAM) [
11,
12], and ground-based ultra-wide band (UWB) localization systems [
13]. They all need to first obtain their respective position coordinates in the same spatial coordinate system from external infrastructure or environmental information and then solve for the relative localization information based on this. These methods have obvious drawbacks. Firstly, once absolute localization has failed, relative localization will also not be possible, for example, when encountering a GNSS-denied environment, when the coverage of ground-based localization stations is exceeded or when the environmental features required for SLAM are not evident. Secondly, errors in absolute localization will be superimposed and magnified during the conversion to relative localization information [
14]. In addition, absolute localization will take up limited resources per swarm UAV, which could have been avoided.
The model for UAV swarms is derived from the group behavior of flying creatures in nature [
15]. They usually rely on organ functions such as vision and hearing to directly obtain information about their relative positions to each other. UAV swarms, as multi-intelligence systems, should also have the ability to achieve relative localization without relying on external facilities or information. Similar functions have already been implemented in the rapidly developing field of advanced driving assistance system (ADAS) research [
16,
17]. Based on the information provided by vision, laser, and other sensors, it has been possible to achieve accurate relative positioning of objects within a certain range while the vehicle is in motion. However, the environment in which vehicles are driven can be approximated as a two-dimensional space, whereas drones are in a more complex three-dimensional scenario.
Relative localization based on radio signals is a classical approach, currently represented by airborne UWB and relative localization based on carrier phase [
18,
19]. Although they are superior in terms of localization accuracy, they will significantly increase the cost, power consumption, and system complexity of each UAV, as well as taking into account mutual interference problems. While LIDAR has superior performance and proven applications, the same expensive price and high power consumption prevent it from being the first choice for swarm UAVs [
20]. Millimeter-wave radar is less expensive, but it has lower localization accuracy and a smaller measurement range [
21].
While relative localization achieved based on vision SLAM is not considered due to its indirectness and instability, vision sensors can also directly provide useful information for relative localization [
22]. Wide-angle lenses, gimbals, camera scheduling algorithms, and target tracking algorithms [
23] ensure flexible acquisition of environmental images [
24]. Binocular cameras and depth cameras are the current mainstream vision solutions [
25]. Binocular vision localization uses the principle of triangular geometric parallax to achieve relative localization. However, the co-processing of binocular data requires high computing resources and speed, and the accuracy and range of measurements are limited when the parallax is small. Depth cameras can obtain depth data based on the principle of structured light or time of flight (ToF), but they have a relatively small applicable distance and imaging field of view, making them unsuitable for the relative localization of drones in motion [
26].
Monocular cameras are common onboard sensors for UAVs and have the advantage of being cheap and easy to deploy. However, information based solely on a single frame from a single camera can only measure direction but not distance unless more auxiliary information is introduced, which is also the core problem that needs to be solved for monocular visual localization [
27]. The implementation of relative localization based on airborne monocular vision offers significant advantages in terms of cost, complexity, and hardware requirements compared to the other methods mentioned above, but there is a lack of mature solutions. Therefore, the development of a relative localization method based only on airborne monocular vision is of great practical importance to solve the relative localization problem of small multi-rotor UAV swarms.
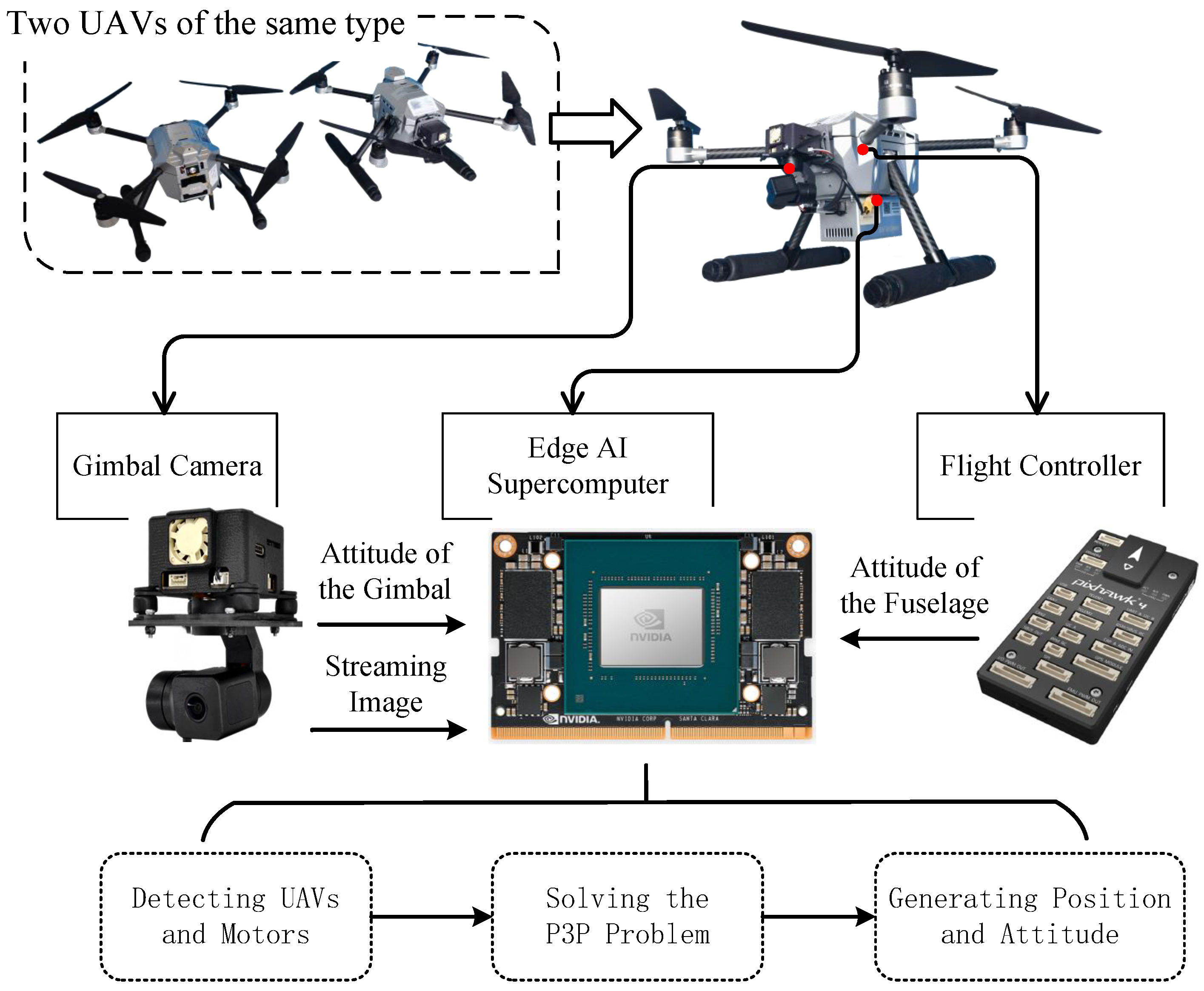
In this research, we develop an airborne monocular-vision-based relative localization scheme using a small quadrotor UAV as an experimental platform. It achieves accurate real-time relative localization between UAVs based only on a single airborne camera’s data and simple feature information of the quadrotor UAV. In summary, our contributions are as follows:
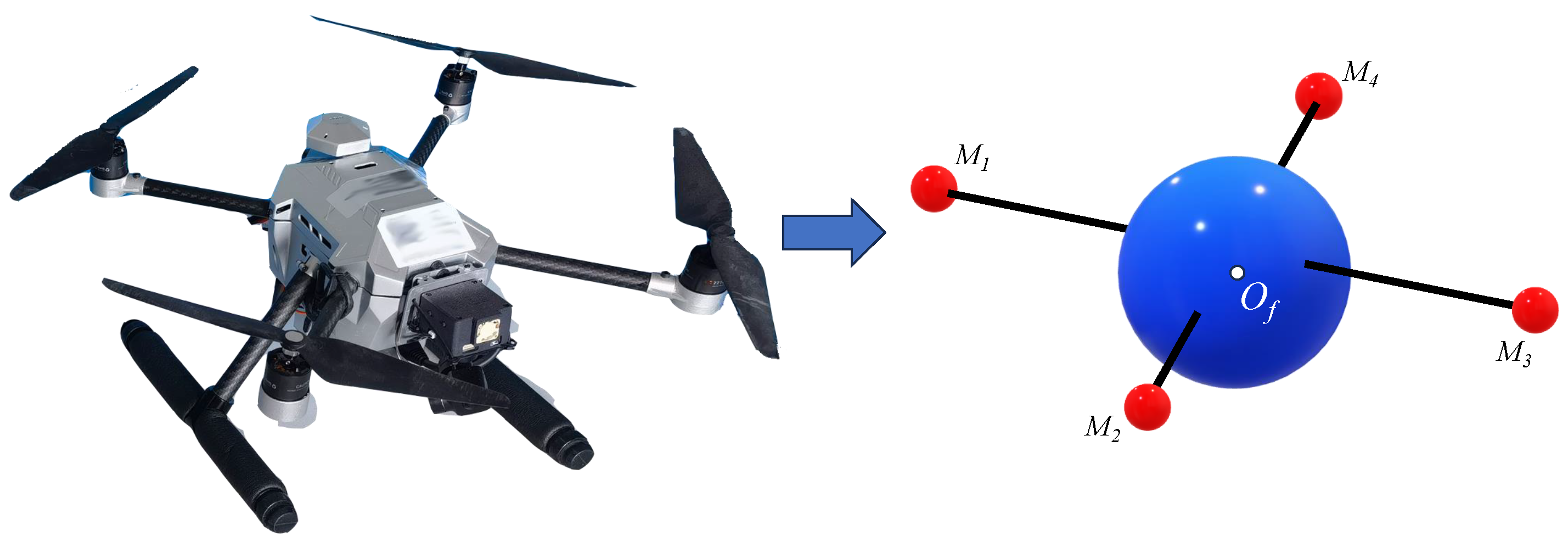
We propose a new idea of directly using only the rotor motors as the basis for localization and use the deep-learning-based YOLOv8-pose keypoint detection algorithm to achieve fast and accurate detection of UAVs and their motors. Compared to other visual localization information sources, we do not add additional conditions and data acquisition is more direct and precise.
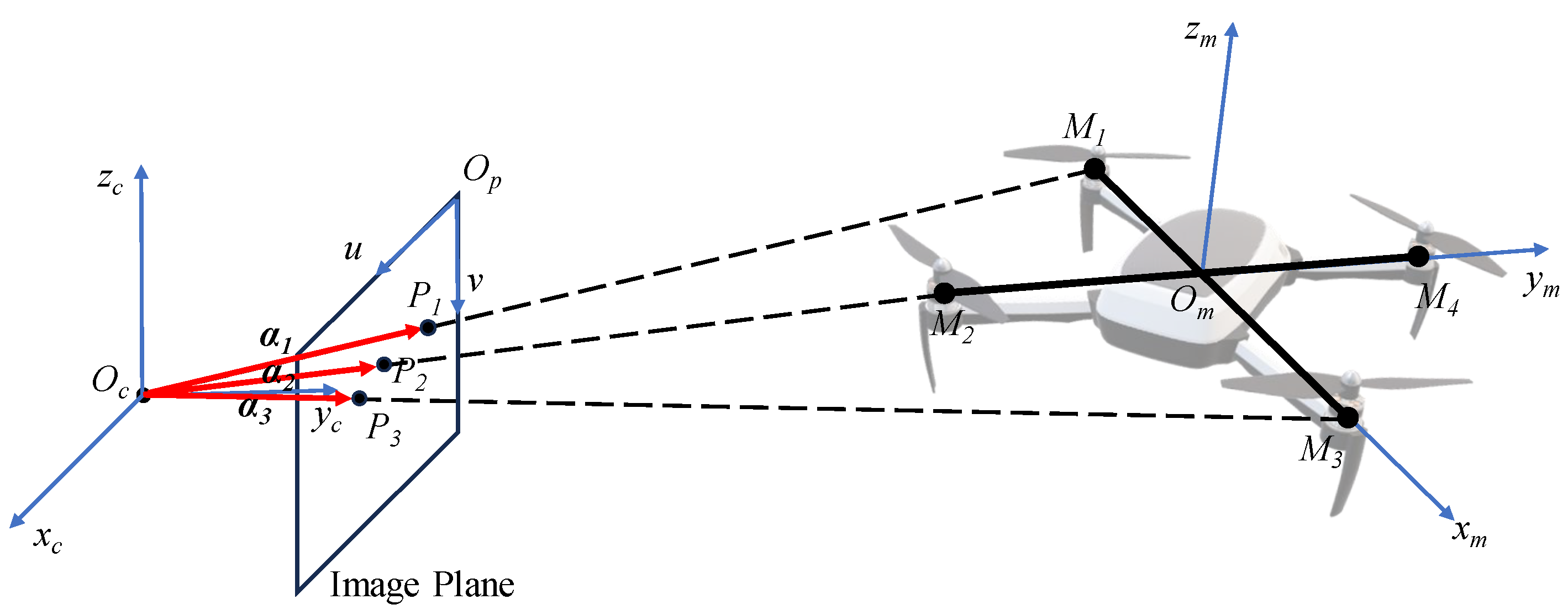
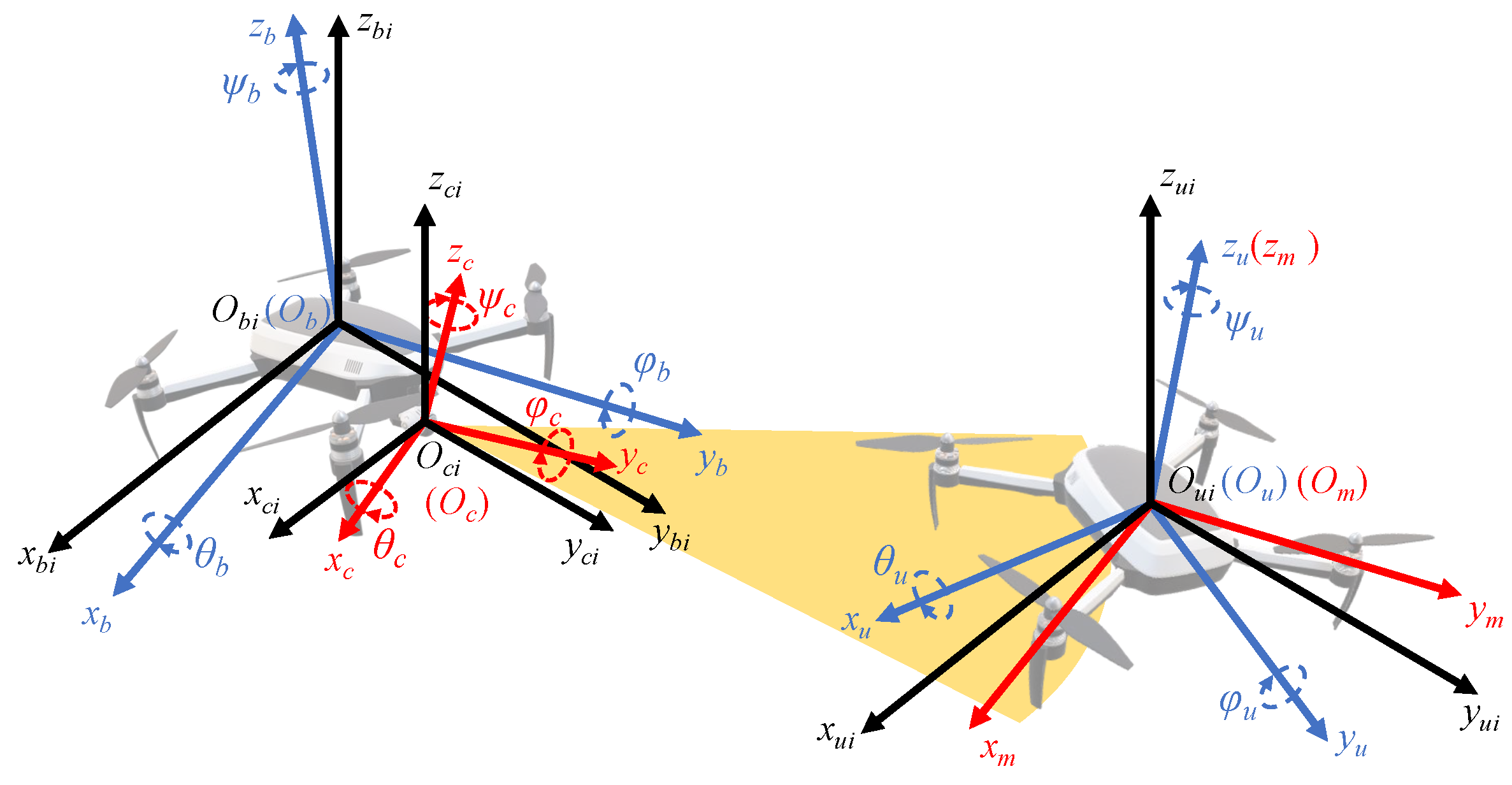
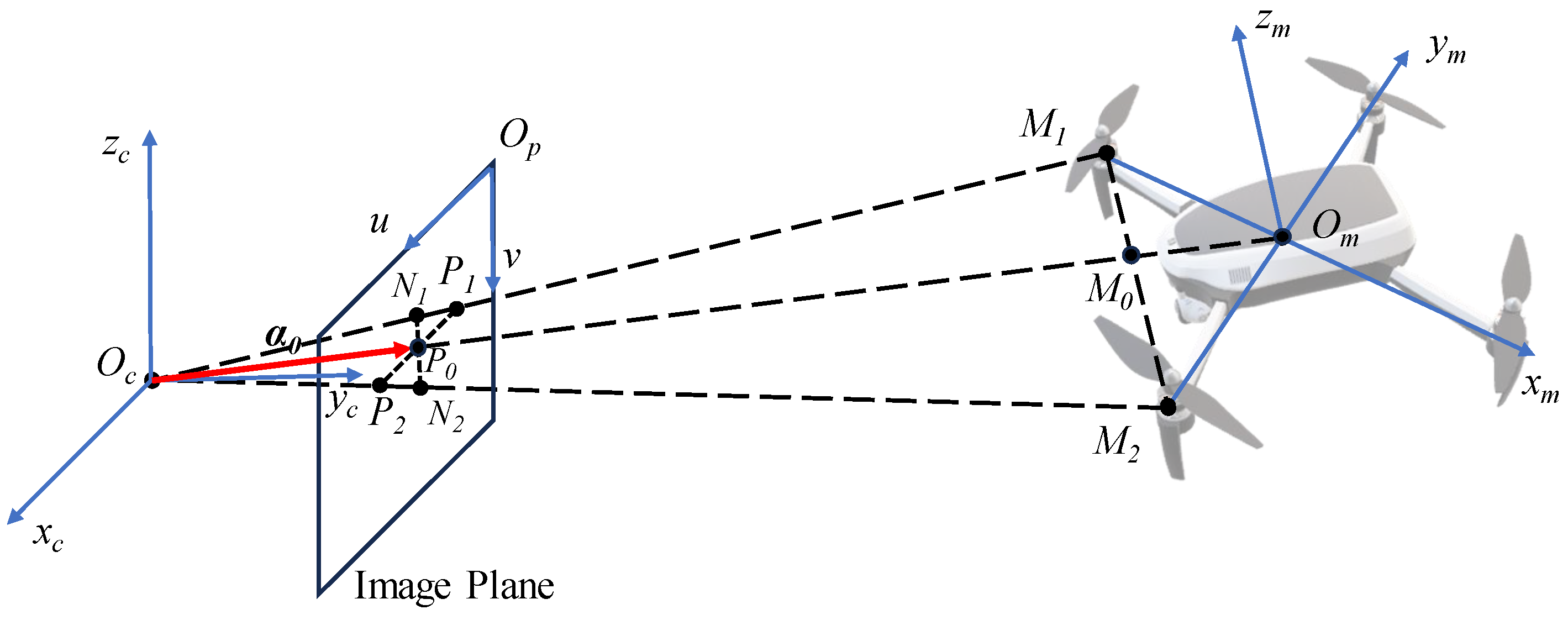
A more suitable algorithm for solving the PnP (Perspective-n-Point) problem is derived based on the image plane 2D coordinates of rotor motors and the shape feature information of the UAV. Our algorithm is optimized for the application target, reduces the complexity of the algorithm by exploiting the geometric features of the UAV, and is faster and more accurate than classical algorithms.
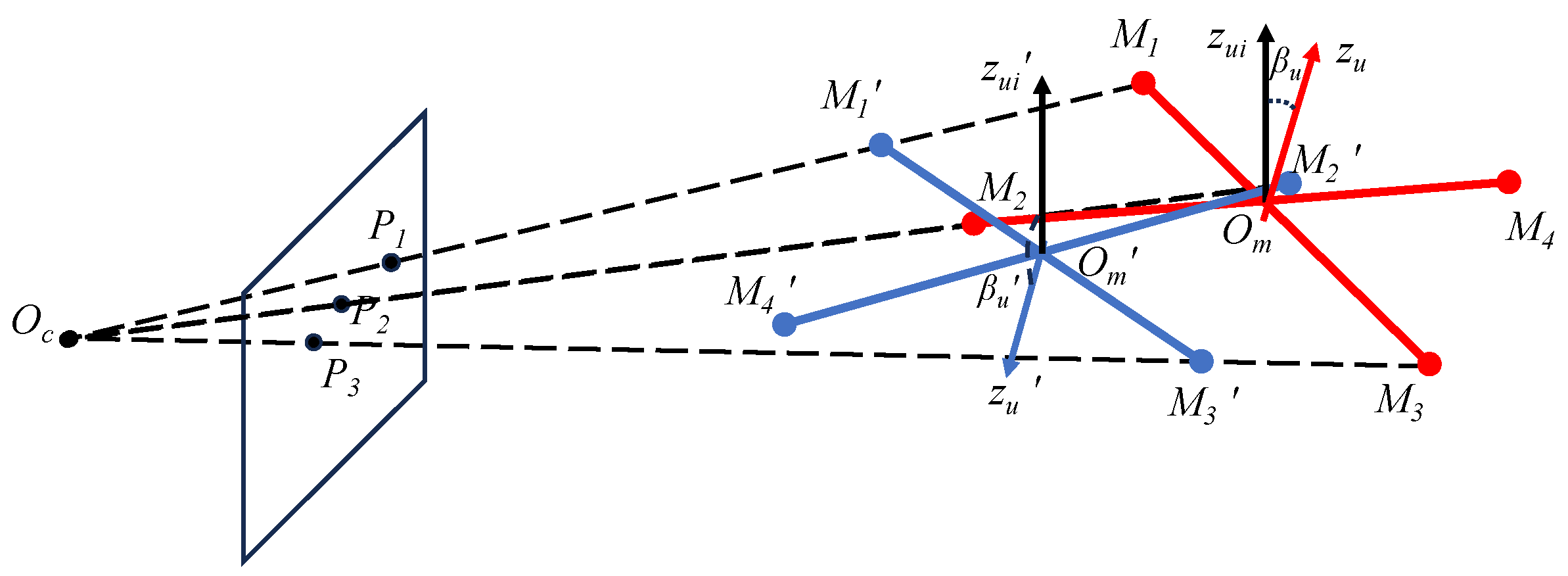
For the multi-solution problem of P3P, we propose a new scheme to determine the unique correct solution based on the pose information instead of the traditional reprojection method, which solves the problem of occluded motors during visual relative localization. The proposed method breaks the limitations of classical methods and reduces the amount of data necessary for visual localization.
A description of symbols and mathematical notations involved in this paper is shown in
Table 1.
6. Conclusions
In order to realize real-time accurate relative localization within UAV swarms, we investigate a visual relative localization scheme based on onboard monocular sensing information. The conclusions of the study are as follows:
Our study validates the feasibility of accurately detecting UAV motors in real time using the YOLOv8-pose attitude detection algorithm.
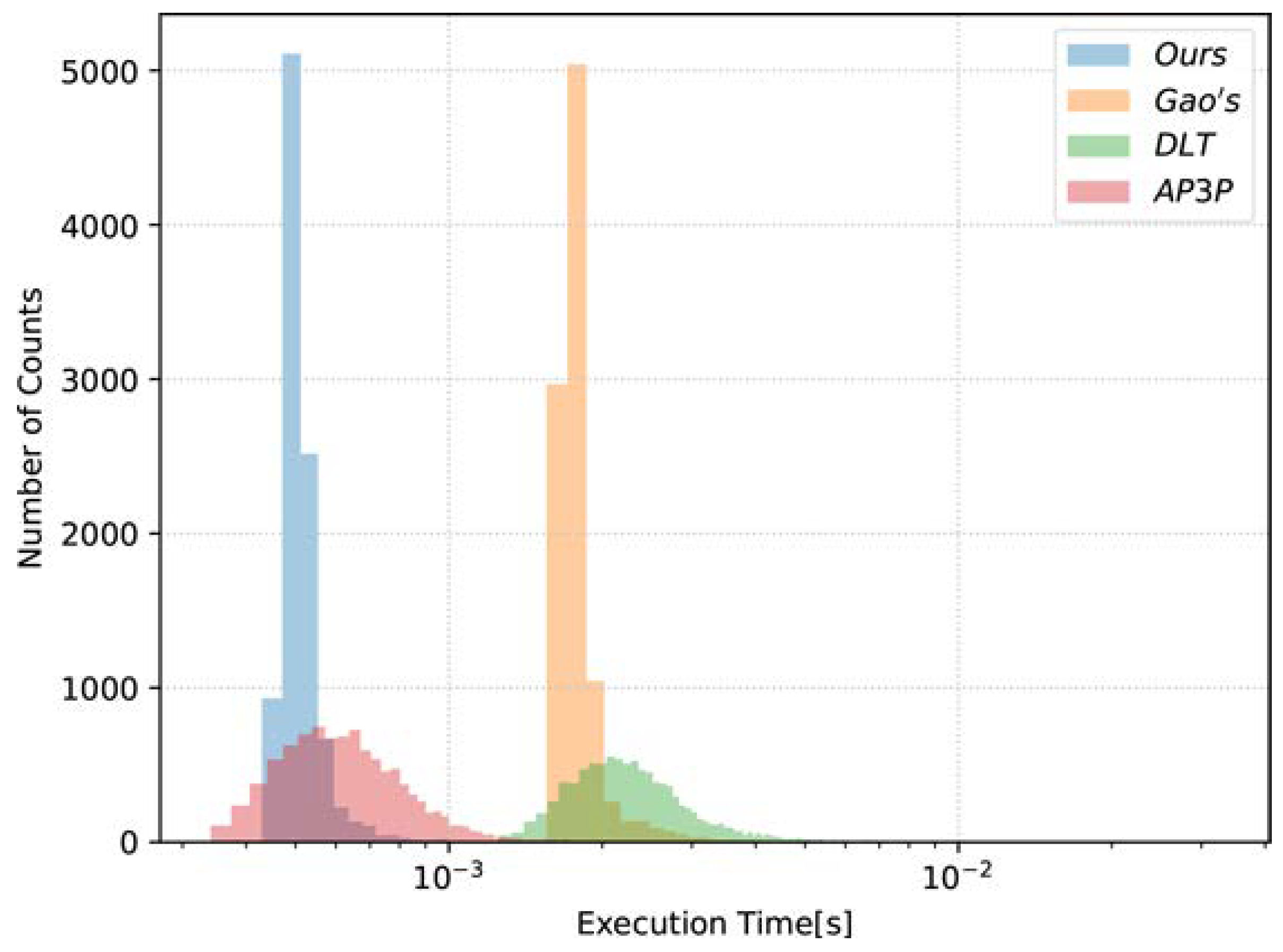
Our PnP solution algorithm derived based on the geometric features of the UAV proved to be faster and more stable.
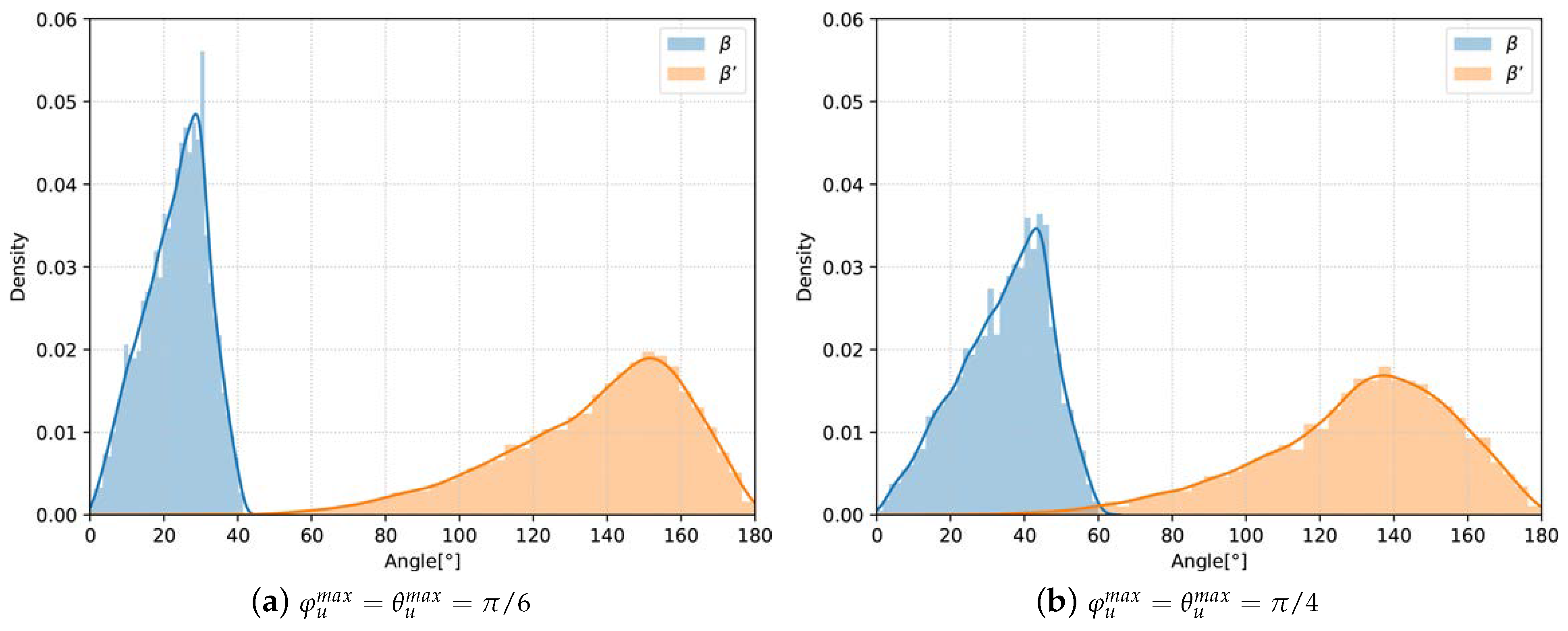
Through the validation of a large number of stochastic experiments, we propose for the first time a fast scheme based on the rationality of UAV attitude to deal with the PnP multi-solution problem, which ensures the stability of the scheme when the visual information is incomplete.
Our scheme improves speed and accuracy while reducing data requirements, and the performance is verified in experiments.
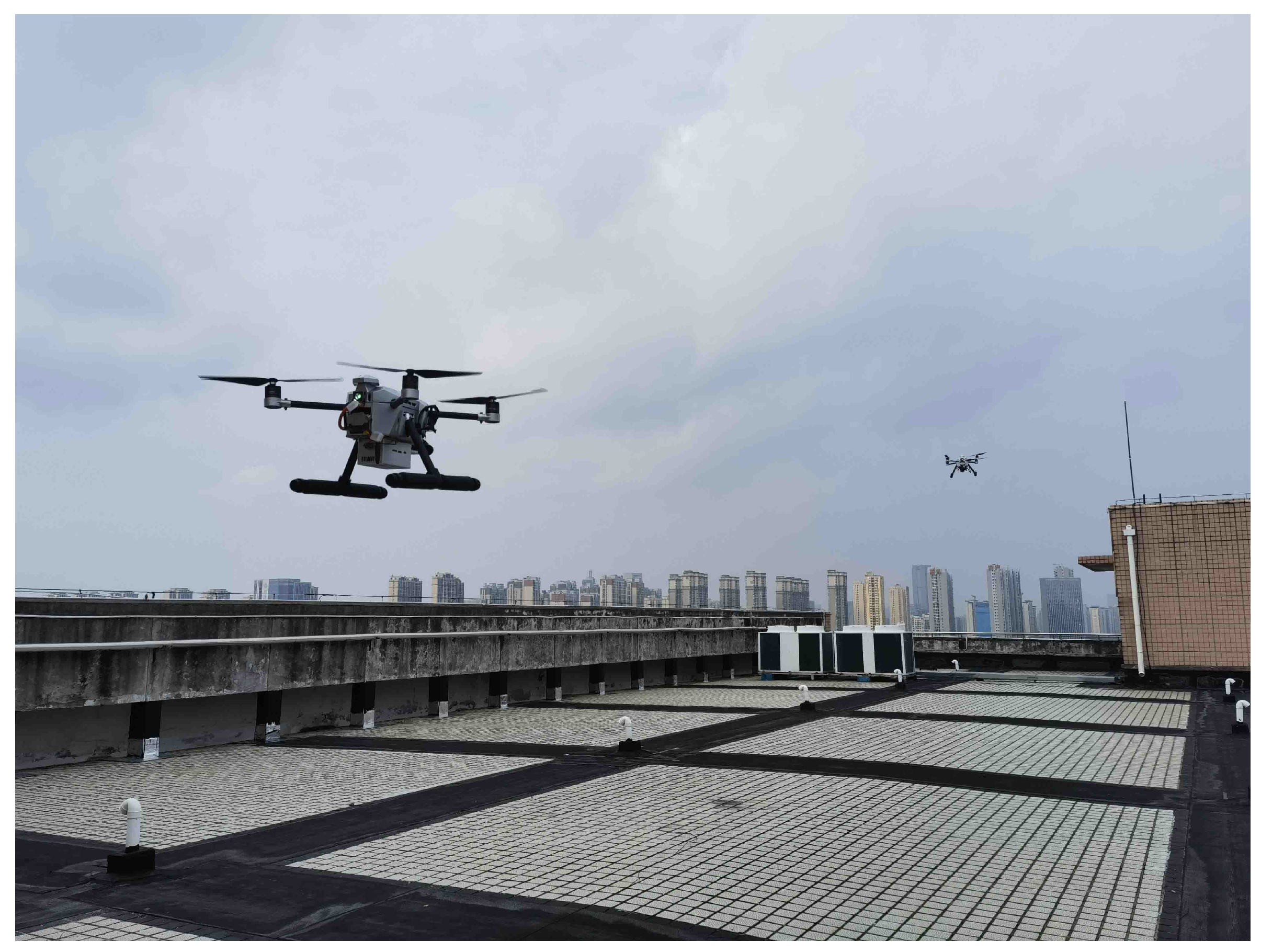
However, there are limitations to our study. First, limited by the detection performance of the detection module for small targets, our relative localization can currently only be achieved at a distance of less than 12 m. Of course, with the improvement in the detection performance, the action distance will be larger. Second, our currently generated position data has not been filtered. So based on the experimental conclusions, our next research direction is to improve the detection performance of the detection module for the motors as small targets at long distances, and the second is to improve the overall stability of the estimation value under the time series through the filtering algorithm.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}