1. Introduction
Transport commuting becomes a ubiquitous part of day to day lives; the vehicular network (VN) plays a positive role and increases the quality of life [
1]. VN technology is advantageous in information applications, automatic toll collection, public safety, automatic driving, traffic coordination, event-driven safety message broadcasting, and so on. VN accesses the location where a traffic accident occurs, timely notifies the pertinent vehicle to adopt security measurement, and then offers quality of service of multimedia information for the tourist during the journey. Regarding the data services, VN is applied for the remainder of services with respect to infectious diseases, carbon emissions, pollution levels of the haze, and other related services that could enhance the living environment of humans [
2]. Moreover, traffic-flow coordination could be benefitted by VN. People timely obtain present traffic data on the road of the vehicle and select the optimum path. These data are particularly effective for the best travel experience for the passenger and for preventing congested sections. Intelligent transport systems benefited considerably from VN [
3]. It provides data with respect to restaurants, petrol stations, weather information, navigation, service areas, and every desirable datum regarding the neighboring environments. VN is employed to automated driving, namely the distance detection among velocity estimation, vehicles, road-condition perception, self-parking, and location service [
4]. VN is employed to realize automated charging of the vehicle. In V2I transmission, RSU could automatically sense the journey mileage of a vehicle, the entrance location, and exit location, later realizing the automated charging that could decrease the congestion at the charging place and enhance the charging efficiency [
5].
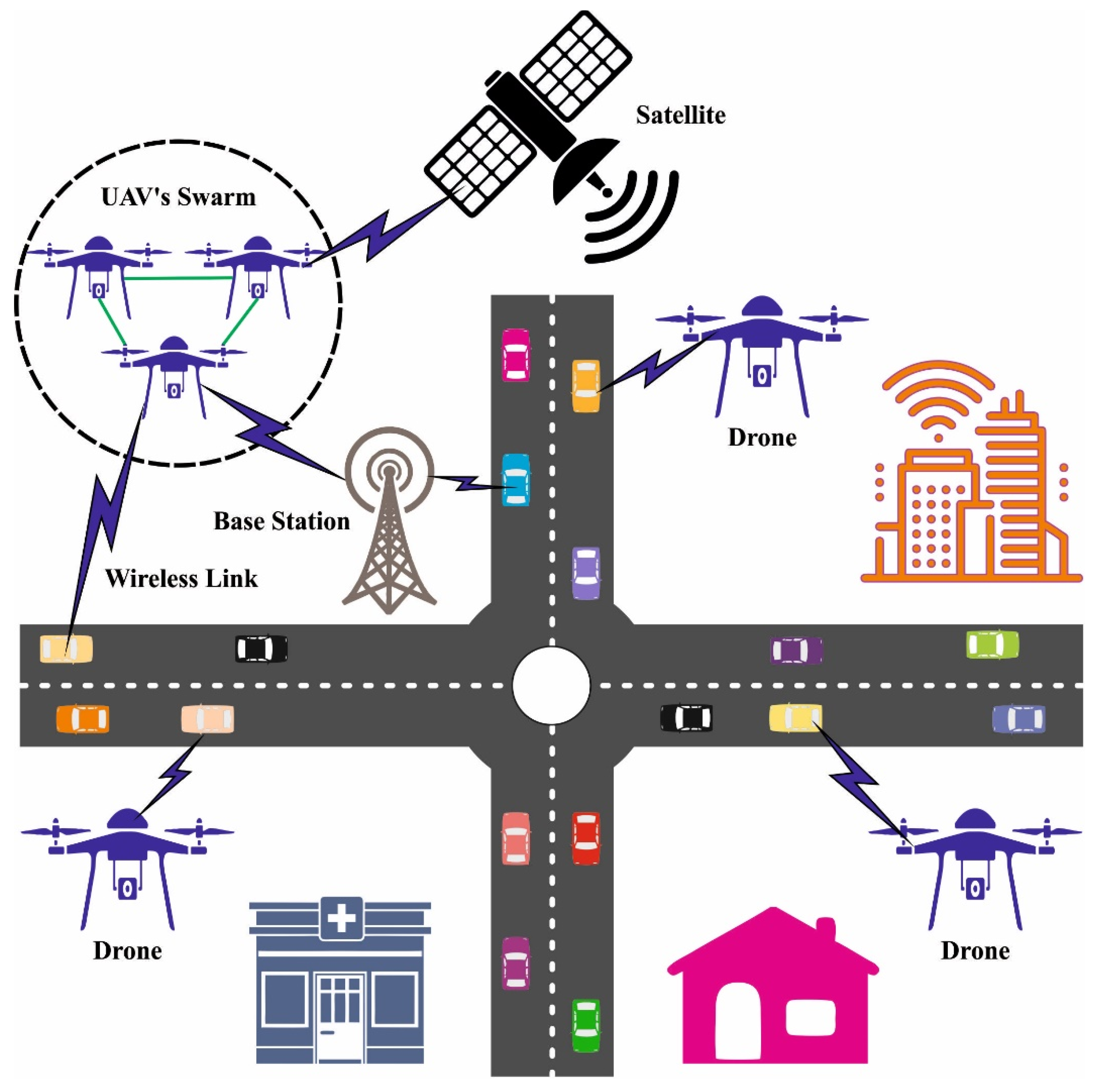
Figure 1 depicts the framework of UAV-assisted vehicular network.
A data-distribution technique is broadly employed in different circumstances, namely emergency collision avoidance [
6], the data acquirement of public entertainment, and traffic-flow management that could decrease the number of traffic accidents, which promote the urban building of a smart city and discharge urban traffic congestion [
7]. In certain scenarios, the timeliness of data dissemination is crucial. To accomplish the objective, unmanned aerial vehicle (UAV) is applied to help with data distribution. Due to better maneuverability of the UAV, it is widely used for completing the data dissemination task in certain scenarios [
8]. For instance, in certain locations, once the transmission framework is damaged, the UAV could be deployed rapidly as the mobile base station to help the transmission network. Network lifetime is a significant parameter in UAV network that is based on whether a specific number of nodes die due to energy consumption [
9]. In mobile UAV networks, topology control is the major aspect for extending network lifetime and reducing communication interference. A hierarchical network based on clustering model is widely employed in mobile networks. The cluster head (CH) selection and clustering process are major factors in the hierarchical network [
10,
11,
12].
This study introduces an Enhanced Artificial Gorilla Troops Optimizer based Clustering Protocol for UAV-Assisted Intelligent Vehicular Network (EAGTOC-UIVN). The goal of the EAGTOC-UIVN technique lies in the clustering of the nodes in UAV-based VN to achieve maximum lifetime and energy efficiency. In the presented EAGTOC-UIVN technique, the EAGTO algorithm is primarily designed by the use of circle chaotic mapping technique. Moreover, the EAGTOC-UIVN technique computes a fitness function with the inclusion of multiple parameters. To depict the improved performance of the EAGTOC-UIVN technique, a widespread simulation analysis was performed.
2. Literature Review
In Reference [
13], an efficient routing technique depending upon a flooding method was developed for robust route identification. It assures an alternate path during path-failure scenarios. In addition, a forecasting approach is employed for anticipating the expiration time of every discovered route. The authors in Reference [
14] considered the issue of content distribution to the vehicles on roadways with overloaded or no available communication structure. Incoming vehicles demand service from a library of content which is partially cached at the UAV; the content of the library is also considered for modifying new vehicles carrying more popular content. A non-orthogonal multiple access (NOMA)-enabled double-layer airborne access vehicular ad hoc networks (DLAA-VANETs) architecture was designed in Reference [
15], which consists of a high-altitude platform (HAP), multiple unmanned aerial vehicles (UAVs), and vehicles. For the designed DLAA-VANETs, the UAV deployment and network optimization problem is addressed. Particularly, the UAV deployment method, depending upon particle swarm optimization, is presented. Next, the NOMA model is introduced into the designed model for improving the transmission rate.
Khabbaz et al. [
16] aimed at enhancing the ground vehicle connectivity in the framework of an alternating vehicle-to-UAV (V2U) transmission condition, whereas vehicles create time-limited connectivity with transient by UAV served as flying BSs responsible to route arriving vehicle information on backbone network or Internet. Zheng et al. [
17] used cyclic-flight UAVs for assisting RSU by offering video download services to vehicles. With the utilization of UAV, seamless communication coverage and stable broadcast connections ensure the optimum quality of services to vehicle. Moreover, the authors present a model-free technique dependent upon DQN for determining an optimum UAV decision procedure for achieving the minimization of stalling time. Raza et al. [
18] examined a UAV-assisted VANET communication structure, whereas UAVs fly over the used region and offer communication service to basic coverage region. UAV-assisted VANET aims for the benefits of line-of-sight (LOS) communication, flexibility, load balancing (LB), and cost-effectual deployment.
Wu et al. [
19] examined a deep supervised learning system to enable intelligence edge for making decisions on the extremely dynamic vehicular network. Specifically, the authors initially presented a clustering-based two-layered (CBTL) technique for solving the JCTO problem offline. Afterward, they planned a deep supervised learning structure of CNN for making fast decisions online. Ghazzai et al. [
20] established a mobility- and energy-aware data routing protocol for UAV-supported VANETs. Most UAVs perform as a flying RSU, gathering information in ground vehicles, but another UAV role is the play of relays for providing the information to mobility service center (MSC). The UAV is modifying its 3D places in an existing range if required for ensuring reliable communication links.
A UAV-helped data dissemination system dependent upon network coding was presented in Reference [
21]. Initially, the graph concept for modeling the occurrence of data loss of the vehicles was utilized; the data dissemination issue was changed to the maximal clique issue of graphs. With the coverage of directional antenna being restricted, a parallel system for determining the maximal clique dependent upon the area separation was presented. Alioua et al. [
22] examine a new distributed SDN-related structure for UAV-support-structure-less vehicular networks. An important purpose is to fill the gap in which no SDN-based infrastructure was presented for these networks. The author’s concentrated mostly on a road safety use-case that integrated UAVs for assisting emergency vehicles in the exploration of affected regions from crucial emergency conditions. In addition, the authors examined an effectual data processing strategy with shared decision-making or computation-offloading problems. Though several models are available in the literature, the network efficiency in UAV-assisted VNs still needs to be improved. In addition, the inclusion of multiple parameters for optimal UAV selection is important as CHs become essential.
3. The Proposed Model
In this study, a new EAGTOC-UIVN technique was developed for clustering the UAV-assisted VN. The major aim of the EAGTOC-UIVN technique exists in the grouping of the nodes in the UAV-based VN to achieve maximum lifetime and energy efficiency. In the presented EAGTOC-UIVN technique, the EAGTO algorithm is primarily designed by the use of the circle chaotic mapping technique.
3.1. System Model
In the presented model, the types of UAVs considered could be middle-size drones or mini drones. A simple collision process is utilized for collision avoidance [
23]. In this work, the UAV changed altitude for possible collision. The UAV’s maximum speed could reach up to 30 m/s. Every UAV device relies on a location-aware component. This location-conscious mechanism allows the routing method to function efficiently and precisely. In general, location data can be attained from an alternative scheme. In the presented method, inertial measurement units and GPS are given for the motion sensing and positioning of the UAV. Each UAV is aware of its ground station and neighbors’ positions. Each UAV is equipped with long- and short-range wireless transmission. Long-range wireless transmission can be utilized for inter-cluster transmission with the ground station and other CHs. Short-range wireless transmission is utilized for intra-transmission with its peers in the cluster.
3.2. Design of EAGTO Technique
With other metaheuristics, AGTO’s stability and convergence accuracy suffer as the optimization problem to be resolved grows in variety and complexity. This flaw requires the further development of novel mechanisms to perform exploitation and exploration and help accomplish improved performance [
24]. A troop comprises a dominant adult male gorilla (silverback), numerous dominant adult females, and their offspring. A silverback gorilla is over 12 years old and obtains the name from the distinct hairs that grow on his back while he attains puberty. Furthermore, the silverback is the leader of the entire troop and is accountable for ensuring everyone’s safety, planning and executing group travel, allocating food and other resources, and making each decision, mediating any conflicts that arise. Male gorillas between the ages of 8 and 12 are considered “black” since the silver fur is not fully grown. It is common for gorillas to leave the birth group for joining a third. However, some male gorillas decide to stick around and keep following the silverback. Such males might fight viciously for controlling the group and accessing adult females when the silverback is killed. The idea of group behaviors in wild gorillas acts as the motivation for the AGTO algorithm. Initialization, local exploitation, and global exploration are the three phases that make up AGTO, the same as they are in other intelligent techniques.
3.2.1. Initialization Phase
Consider the
-dimension space has
gorillas. To specify where
-
gorillas are in the universe, we could formulate
, whereas
, and it can be defined as follows:
where rand () lies between 0 and 1. The search range can be determined by using the upper and lower limits,
and
, respectively; and the matrix,
, has a random value,
, within [0, 1] that is allocated to all the elements of the
rows and
columns in the matrix represented as
.
3.2.2. Exploration Phase
In the above equations,
signifies iteration times,
indicates the gorilla’s existing location vector, and
denotes the potential search agent position for the following iteration. Furthermore, the random numbers
, and
denote a number value between zero and one. Two locations among the existing population of gorillas,
and
, are selected randomly;
is a predetermined value. By utilizing the problem dimension as an index,
denotes the row vector where the component value was derived randomly from
. Additionally,
can be defined as follows:
where
denotes the cosine function,
indicates positive real numbers amongst [0, 1], and
denotes the maximal iteration number. It is possible to evaluate
, the value of variable, as follows:
where
indicates the arbitrary value within [−1, 1]. Afterward, every probable
solution is produced, owing to the exploration, and the fitness value is compared. If
outperformes
, it is kept and utilized in the location of
. This is represented as the condition
, whereas
indicates the fitness function for the problem in question
. Additionally, the better option available at the time is now considered to be the silverback.
3.2.3. Exploitation Phase
Once the new troop of gorillas is formed, the silverback is the dominant male and is at the peak of his health and strength. They follow the silverback gorilla since they forage for food. Unavoidably, the silverback will age and die, and in his location, a younger blackback in the troop might engage in fighting over mating and leadership with other males. AGTO’s exploitation stage follows the silverback and competes for adult female gorillas.
is presented for controlling these transitions. When
in Equation (4) is higher than
, this follows the silverback’s initial model:
In such cases, the optimum solution found so far is indicated as X silverback, the existing location vector is represented as
, and
is estimated by means of Equation (5). The values of
are defined as follows:
where
denotes the overall individual number, and
indicates a vector demonstrating the gorilla’s position:
It is the existing location, represented as
, and the impact force,
, that are evaluated by Equations (7) and (8). A random value within zero and one is utilized for
in Equation (4). Additionally, Equation (9) is utilized for assessing the efficiency of the coefficient.
is utilized for stimulating the level of violence in the game. With the equation denoting a constant, we could define what number represents Equation (10). Equation (6) involves
, which is a value selected randomly within zero and one. Standard distribution,
, is when r70.5 is a coincidental event, and
indicates the number of spatial dimensions. However, if
is less than half,
is equivalent to the random quantity that fits neatly into the standard distribution. Afterward, the exploitation stage is complete, and the value of candidate fitness for the recently generated
problems is calculated.
is preserved if
Figure 2 depicts the flowchart of GTOA.
In this work, the EAGTO algorithm was primarily designed by the use of the circle chaotic mapping technique. To increase the population diversity and exploit the data in the solution space, the circle chaotic function is proposed to increase the initialization mode of the GTOA. Additionally, it can be mathematically expressed as follows:
whereas
a = 0.5 and
b = 0.2, the circle mapping and random search mechanism are chosen to be independently implemented 300 times. The traversal of circle chaotic mapping is more homogeneously distributed and wider in the range of [0, 1]. Thus, after integrating circle chaotic mapping, the presented technique has a robust global exploration capability.
3.3. Clustering Process Involved in EAGTOC-UIVN Technique
The EAGTOC-UIVN technique computes a fitness function with the inclusion of multiple parameters. The EAGTOC-UIVN method is proposed with the existence of 4 fitness variables, namely energy efficacy of cluster node density, UAV nodes, distance in CH to sink, and average distance of UAV for CH enclosed by their sensing series [
25]. The data on fitness parameters was provided by the following:
Energy efficiency: The
CH executes various events, such as gathered, sense, data broadcast, aggregation, and so on; hence,
CH intakes the greatest amount of energy when compared to other nodes. Then it is vital for defining an
FF that shared the load among each UAV from the network. The fitness variable for effective deployment of network energy is given below:
In Equation (12), , and denote the node RE, network average energy, and whole quantity of UAV nodes, respectively. shows the optimum percentage of CHs.
Cluster node density: In intra-cluster communication, the cost is a crucial parameter for the high energy effectiveness of the network. Next, the network energy deployment was larger when the cost function of cluster was determined as follows:
From the expression, denotes the number of UAVs from the range of CH . The values of objective function are greater than able choice of CH and exploits from reducing the energy reduction.
The average distance of UAVs to the
CH within its sensing range: In intra-cluster communication, UAVs transmit information to the
CH. When the
CH is farther from the CM, the energy of the UAV diminishes; when the
CH is closer to the member UAV nodes afterward, there is a deployment of minimal energy.
where
and
indicate the number of UAVs from the sensing sequence and Euclidean distance in node and
CH from the sensing series of the cluster. Thus, the value of
is minimal; however, the intra-cluster communication power is lessened.
Distance from
CH to
BS: The distance between the
BSs and
CHs takes a basic function, as if the
CHS is farther from the sink and exploits energy quickly that is evaluated by the following:
In Equation (15), indicates the Euclidean distance among the BS and . Minimizing the objective function specified that the CHS is not farther from the BS.
Once the
, and
function parameters were evaluated, the objective function was also named FF and calculated as follows:
In Equation (16), , and denote the weight coefficient for the , and FF parameters, correspondingly. The range of weight coefficient ranges from 0 to 1.
4. Results and Discussion
The proposed model was simulated by using MATLAB R2019a. The simulation parameters are listed in
Table 1. In this section, a detailed experimental validation of the EAGTOC-UIVN approach is investigated under distinct UAVs.
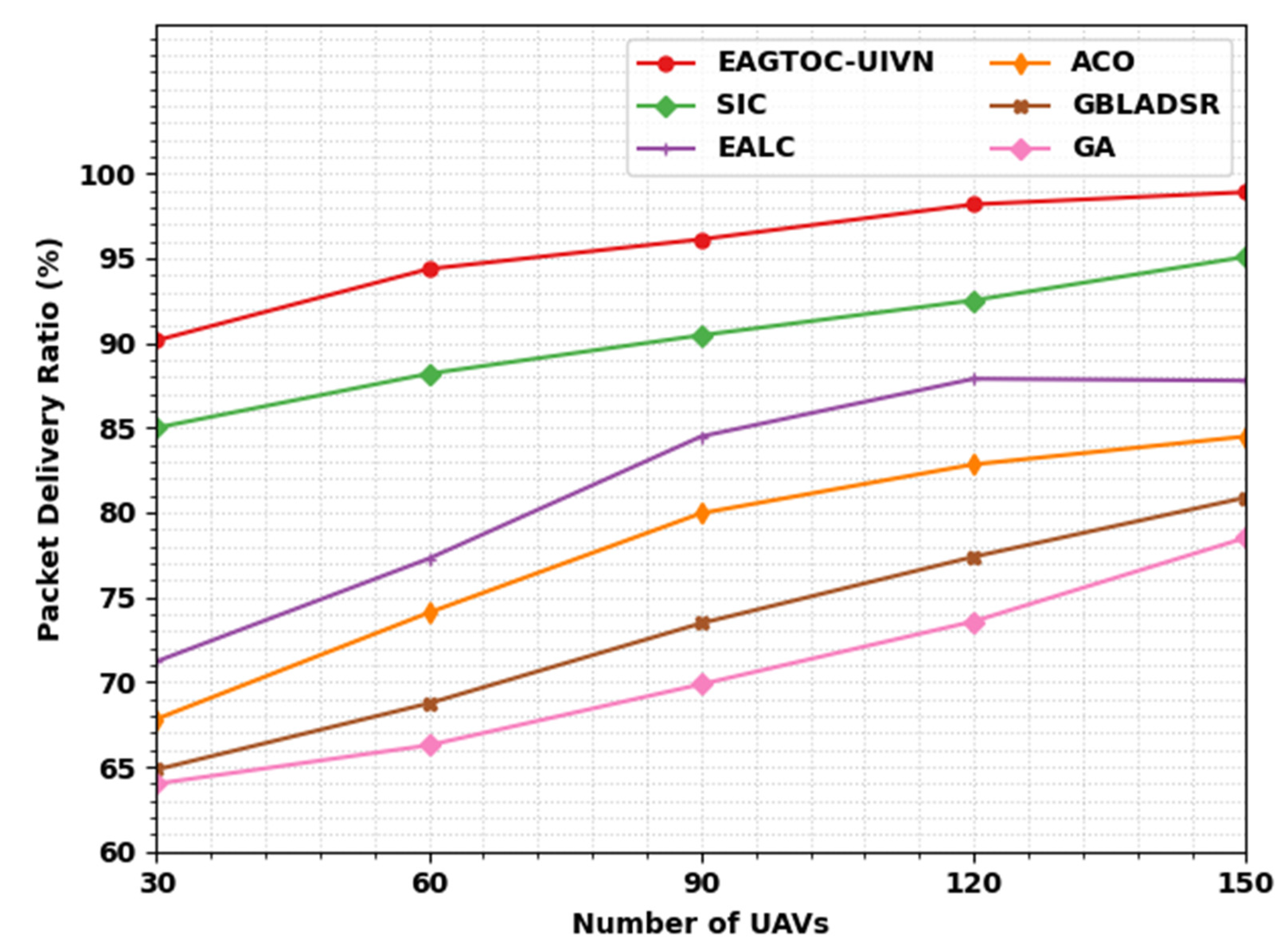
Table 2 and
Figure 3 report an overall PDR examination of the EAGTOC-UIVN model under several UAVs, with existing models such as swarm-intelligence-based clustering (SIC), EALC, ant-colony optimization (ACO), GBLADSR, and genetic algorithm (GA) [
23].
The experimental value implies that the EAGTOC-UIVN technique obtained a better performance under all UAVs. For example, on 30 UAVs, the EAGTOC-UIVN method reached an increased PDR value of 90.15%. On the other hand, the SIC, EALC, ACO, GBLADSR, and GA approaches accomplished decreased PDR values of 85%, 71.21%, 67.81%, 64.83%, and 64%, correspondingly. Meanwhile, on 150 UAVs, the EAGTOC-UIVN technique attained an improved PDR value of 98.90%. In contrast, the SIC, EALC, ACO, GBLADSR, and GA techniques attained reduced PDR values of 95.09%, 87.78%, 84.49%, 80.89%, and 78.52%, correspondingly.
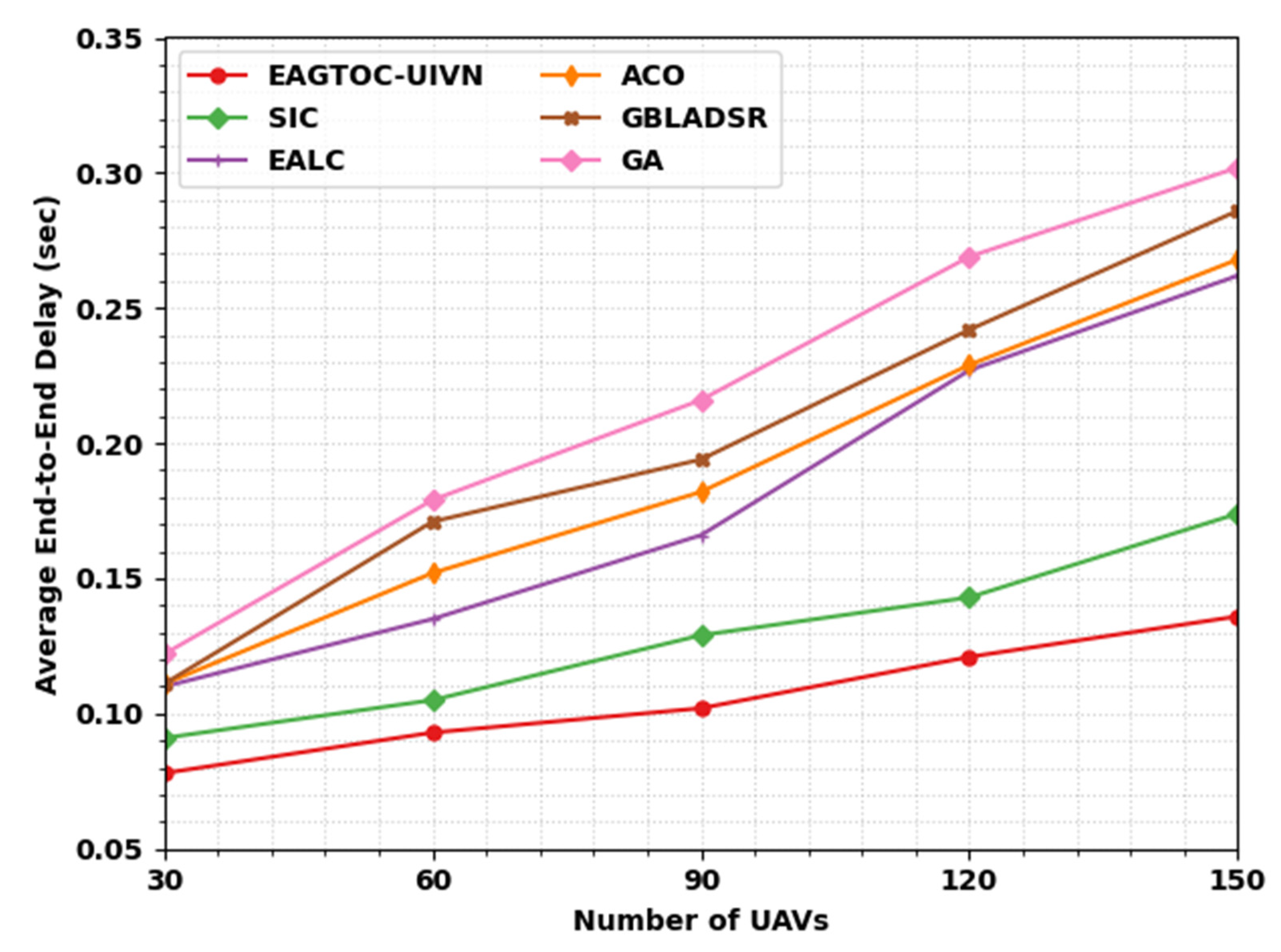
In
Table 3 and
Figure 4, a brief average end-to-end delay (AETED) assessment of the EAGTOC-UIVN with recent techniques is given. The results implied that the GA model failed to portray effectual outcomes with maximum values of AETED. At the same time, the EALC, ACO, and GBLADSR models reached closer AETED values. Although the SIC model tried to show a reasonable AETED value, the EAGTOC-UIVN model gained effectual outcomes with minimal AETED values. Notice that the EAGTOC-UIVN model reached an AETED value of at least 0.078 s under 30 UAVs.
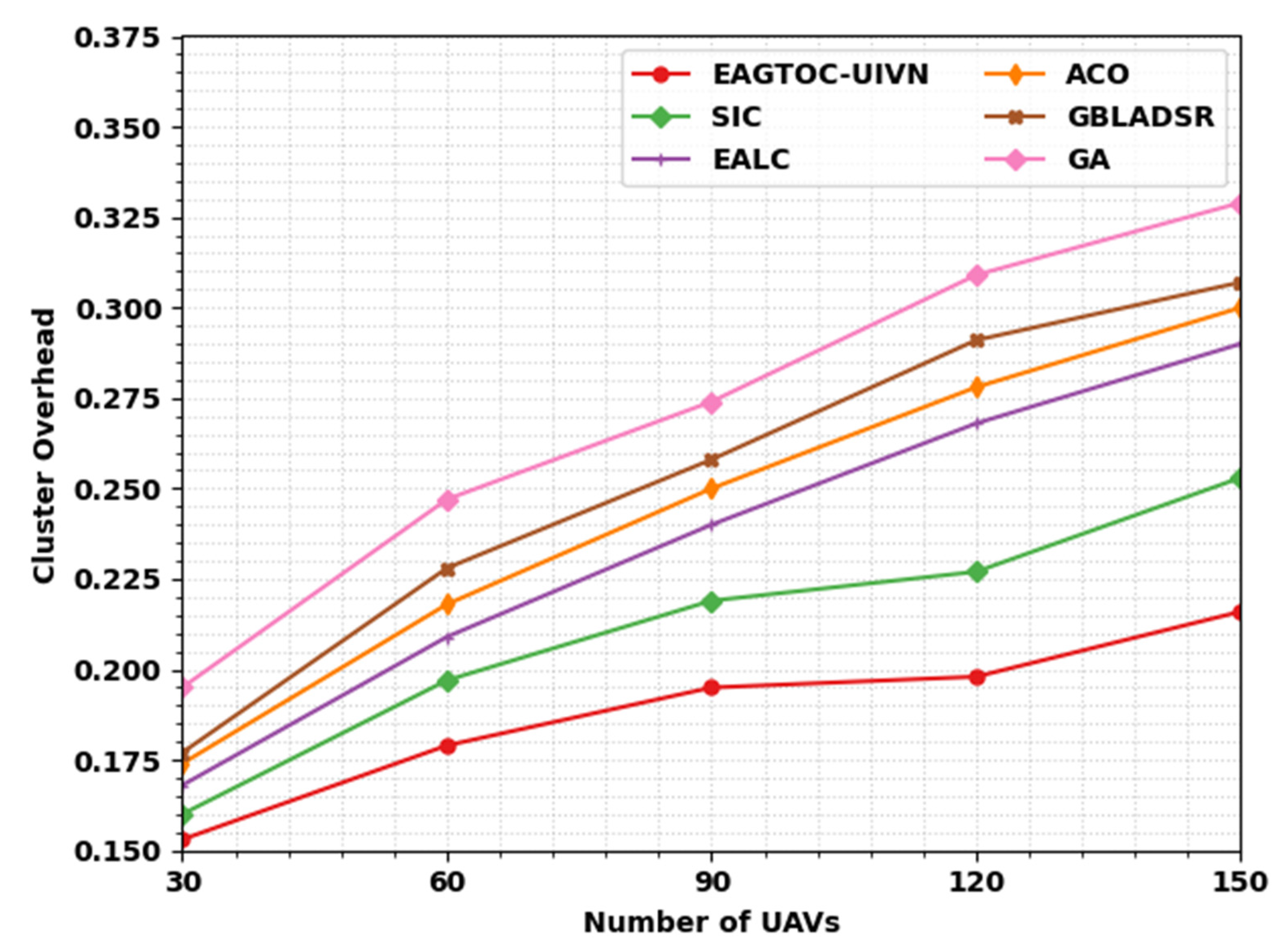
In
Table 4 and
Figure 5, a brief cluster overhead (COH) assessment of the EAGTOC-UIVN with recent techniques is given. The result implies that the GA technique failed to represent effectual outcomes with a maximal value of COH. Simultaneously, the EALC, ACO, and GBLADSR techniques attained closer COH values. Even though the SIC method tried to demonstrate a reasonable COH value, the EAGTOC-UIVN technique obtained effectual outcomes with minimal COH values. Note that the EAGTOC-UIVN methodology attained a minimum COH value of 0.153 under 30 UAVs.
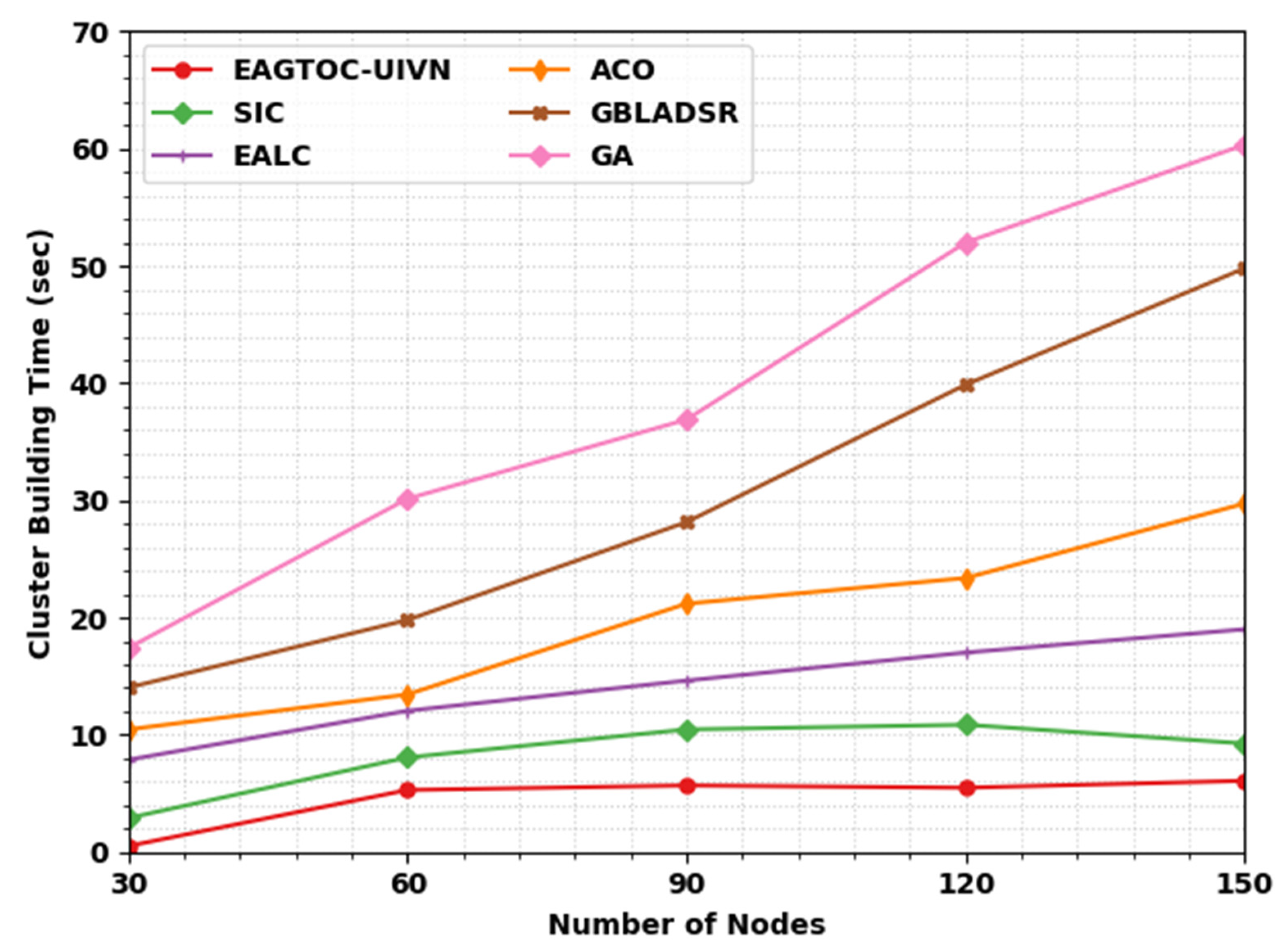
In
Table 5 and
Figure 6, a brief cluster building time (CBT) assessment of the EAGTOC-UIVN with recent approaches is given. The result implies that the GA approach failed to represent effectual outcomes with maximal value of CBT. Simultaneously, the EALC, ACO, and GBLADSR techniques attained closer CBT values. Even though the SIC approach tried to demonstrate a reasonable CBT value, the EAGTOC-UIVN technique obtained effectual outcomes with the lowest CBT values. Note that the EAGTOC-UIVN method has attained a minimum CBT value of 0.51 s under 30 nodes.
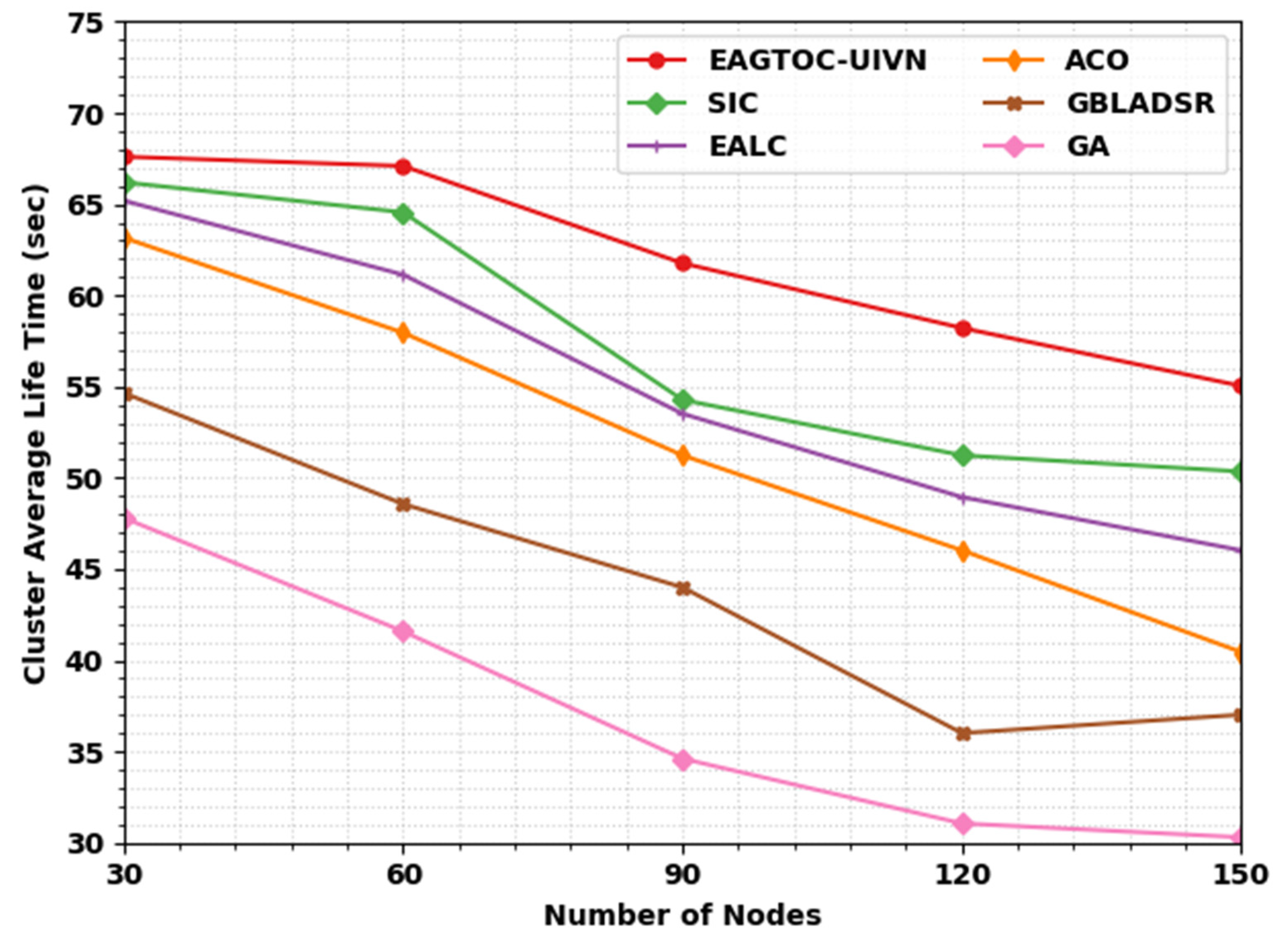
Table 6 and
Figure 7 show the cluster average lifetime (CALT) analysis of the EAGTOC-UIVN technique under various nodes. The experimental value implies that the EAGTOC-UIVN approach attained an improved performance under all nodes. For example, on 30 nodes, the EAGTOC-UIVN technique attained an improved CALT value of 67.61 s. On the other hand, the SIC, EALC, ACO, GBLADSR, and GA systems attained minimized CALT values of 66.21 s, 65.20 s, 63.17 s, 54.66 s, and 47.81 s, correspondingly. Meanwhile, on 150 nodes, the EAGTOC-UIVN approach gained an improved CALT value of 55.04 s. In contrast, the SIC, EALC, ACO, GBLADSR, and GA techniques attained reduced CALT values of 50.35 s, 46.03 s, 40.45 s, 37.02 s, and 30.30 s, correspondingly.
Table 7 and
Figure 8 show the number of alive nodes (NOAN) investigation of the EAGTOC-UIVN technique under various rounds. The experimental value implies that the EAGTOC-UIVN approach gained improved performance under all rounds. For example, on 400 rounds, the EAGTOC-UIVN system reached an improved NOAN value of 100. In contrast, the SIC, EALC, ACO, GBLADSR, and GA approaches attained reduced NOAN values of 98, 95, 93, 92, and 83, correspondingly. Meanwhile, on 1800 rounds, the EAGTOC-UIVN model gained an improved NOAN value of 71. In contrast, the SIC, EALC, ACO, GBLADSR, and GA methods attained improved NOAN values of 44, 20, 11, 4, and 0, correspondingly.
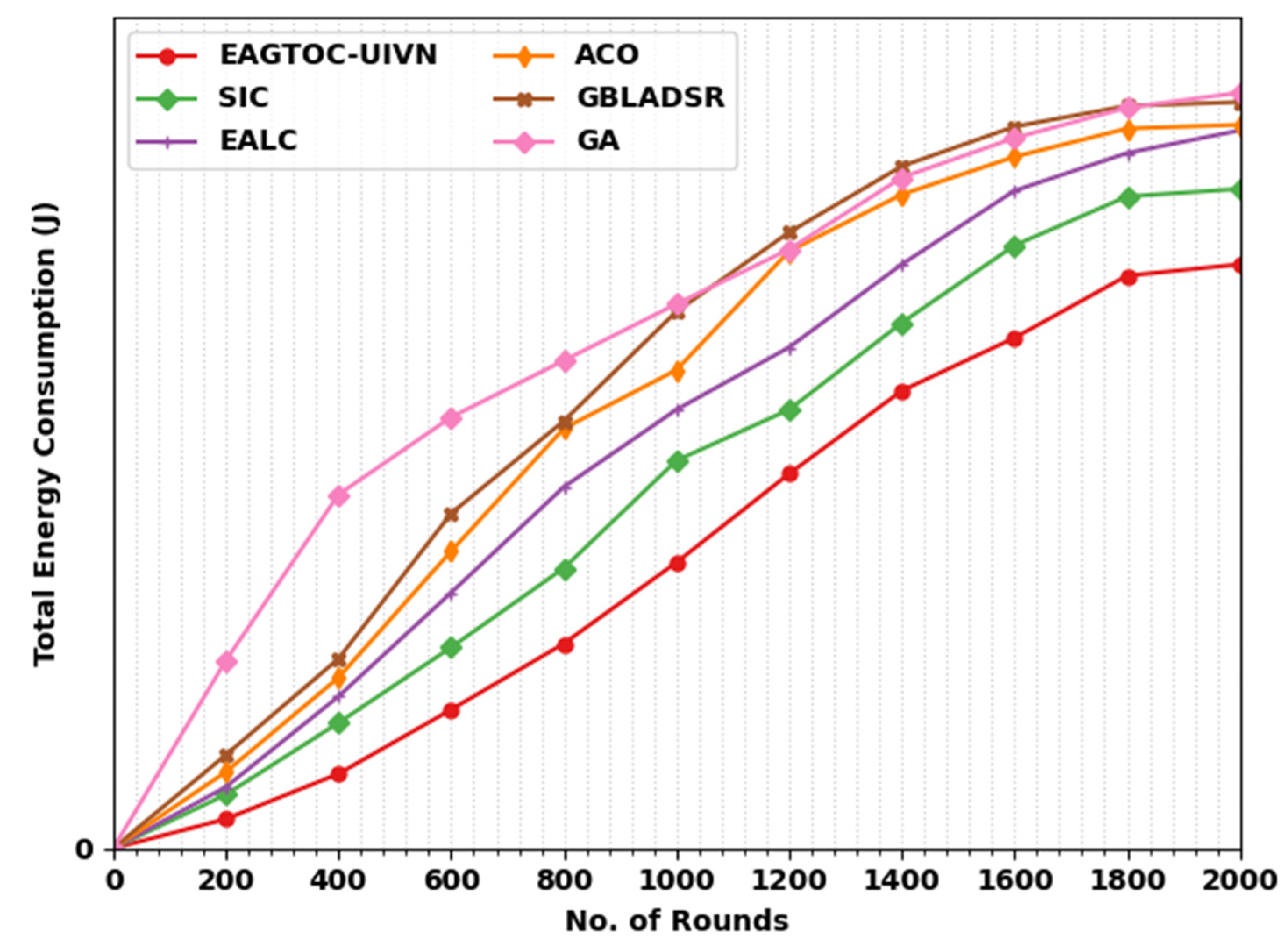
In
Table 8 and
Figure 9, a brief total energy consumption (TECON) assessment of the EAGTOC-UIVN technique with recent approaches is given. The outcomes imply that the GA technique has failed to describe effectual outcomes with maximal values of TECON.
Simultaneously, the EALC, ACO, and GBLADSR techniques obtained closer TECON values. Even though the SIC system tried to show a reasonable TECON value, the EAGTOC-UIVN approach attained effectual outcomes with minimal TECON values. Note that the EAGTOC-UIVN method attained a minimum TECON value of 38.61 J under 200 rounds. From these results, it is evident that the presented model improves the overall network efficacy.

 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}