
Hybrid Impulsive Feedback Control for Drive–Response Synchronization of Fractional-Order Multi-Link Memristive Neural Networks with Multi-Delays

{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminary Knowledge and Mathematical Model
3. Main Results
- (i)
- When the impulsive gain satisfies and , the impulsive intervals are not strictly limited.
- (ii)
- When the impulsive gain satisfies , the impulsive intervals can be determined by the inequality , where , , and .
- (iii)
- When the impulsive gain satisfies , the impulsive intervals can be determined by the inequality , where , , and .
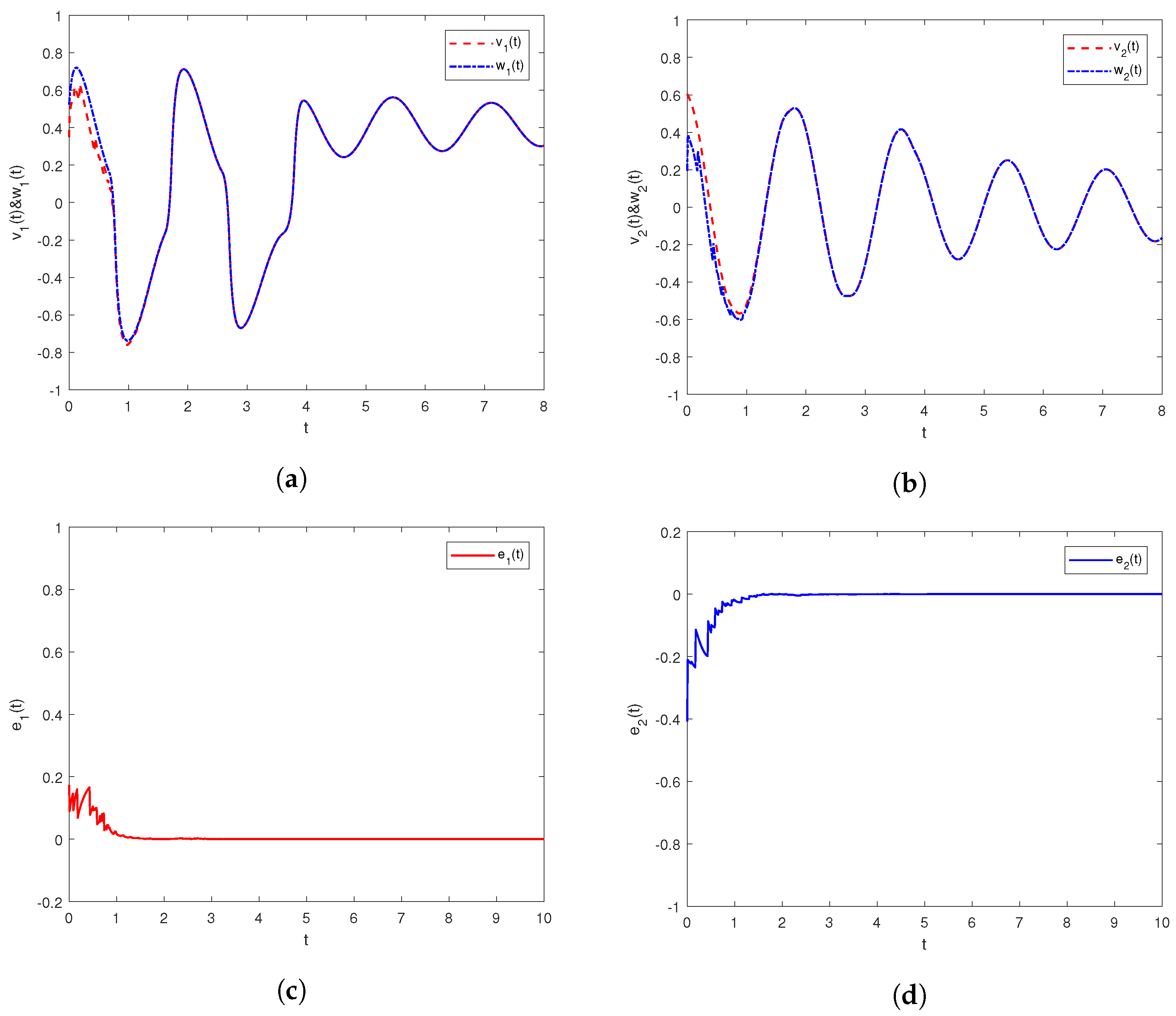
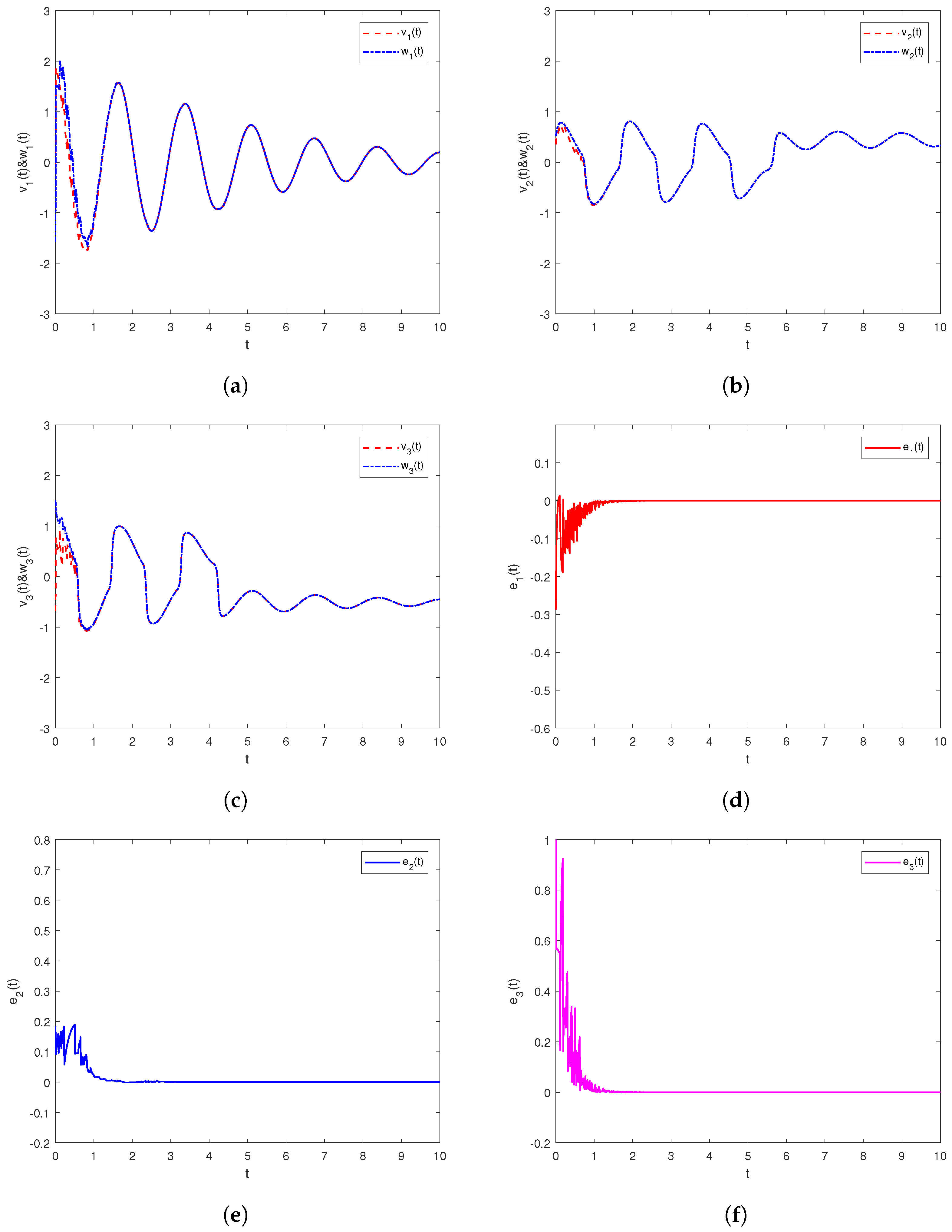
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Adhikari, S.P.; Yang, C.; Kim, H.; Chua, L.O. Memristor bridge synapse-based neural network and its learning. IEEE Transacations Neural Netw. Learn. Syst. 2012, 23, 1426–1435. [Google Scholar] [CrossRef] [PubMed]
- Pershin, Y.V.; di Ventra, M. On the validity of memristor modeling in the neural network literature. Neural Netw. 2020, 121, 52–56. [Google Scholar] [CrossRef] [PubMed]
- Ding, K.; Zhu, Q.X. A note on sampled-data synchronization of memristor networks subject to actuator failures and two different activations. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 2097–2101. [Google Scholar] [CrossRef]
- Wang, X.; Park, J.H.; Zhong, S.; Yang, H. A switched operation approach to sampled-data control stabilization of fuzzy memristive neural networks with time-varying delay. IEEE Transacations Neural Netw. Learn. Syst. 2020, 31, 891–900. [Google Scholar] [CrossRef]
- Zhou, C.; Wang, C.; Yao, W.; Lin, H. Observer-based synchronization of memristive neural networks under dos attacks and actuator saturation and its application to image encryptiong. Appl. Math. Comput. 2022, 425, 127080. [Google Scholar]
- Cheng, J.; Lin, A.; Cao, J.; Qiu, J.; Qi, W. Protocol-based fault detection for discrete-time memristive neural networks with effect. Inf. Sci. 2022, 615, 118–135. [Google Scholar] [CrossRef]
- Lu, J.; Kurths, J.; Cao, J.; Mahdavi, N.; Huang, C. Synchronization control for nonlinear stochastic dynamical networks: Pinning impulsive strategy. IEEE Trans. Netw. Sci. Eng. 2012, 23, 285–292. [Google Scholar]
- Jiang, C.; Tang, Z.; Park, J.H.; Xiong, N.N. Matrix measure-based projective synchronization on coupled neural networks with clustering treess. IEEE Trans. Cybern. 2023, 53, 1222–1234. [Google Scholar] [CrossRef]
- Bao, H.B.; Park, J.H.; Cao, J.D. Exponential synchronization of coupled stochastic memristor-based neural networks with time-varying probabilistic delay coupling and impulsive delay. IEEE Transacations Neural Netw. Learn. Syst. 2016, 27, 190–201. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Fang, J.A.; Li, H. Finite-time synchronization of memristive neural networks with discontinuous activation functions and mixed time-varying delays. Neurocomputing 2019, 340, 99–109. [Google Scholar] [CrossRef]
- Yu, T.H.; Cao, J.D.; Rutkowski, L.; Luo, Y.P. Finite-time synchronization of complex-valued memristive-based neural networks via hybrid controls. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 3938–3947. [Google Scholar] [CrossRef]
- Yang, S.F.; Guo, Z.Y.; Wang, J. Robust synchronization of multiple memristive neural networks with uncertain parameters via nonlinear coupling. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 1077–1086. [Google Scholar] [CrossRef]
- Zhang, S.; Yang, Y.Q.; Sui, X.; Xu, X.Y. Finite-time synchronization of memristive neural networks with parameter uncertainties via aperiodically intermittent adjustment. Phys. A 2019, 534, 122258. [Google Scholar] [CrossRef]
- Alsaedi, A.; Cao, J.; Ahmad, B.; Alshehri, A.; Tan, X. Synchronization of master–slave memristive neural networks via fuzzy output-based adaptive strategy. Chaos Solitons Fractals 2022, 158, 112095. [Google Scholar] [CrossRef]
- Ding, K.; Zhu, Q.X. Intermittent quasi-synchronization criteria of chaotic delayed neural networks with parameter mismatches and stochastic perturbation mismatches via Razumikhin-type approach. Neurocomputing 2019, 356, 314–324. [Google Scholar] [CrossRef]
- Liu, L.R.; Bao, H.B. Event-triggered impulsive synchronization of coupled delayed memristive neural networks under dynamic and static conditions. Neurocomputing 2022, 504, 109–122. [Google Scholar] [CrossRef]
- Wang, F.; Zheng, Z.W.; Yang, Y.Q. Quasi-synchronization of heterogenous fractional-order dynamical networks with time-varying delay via distributed impulsive control. Chaos Solitons Fractals 2021, 142, 110465. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Srivastava, H.M. Some parametric and argument variations of the operators of fractional calculus and related special functions and integral transformations. J. Nonlinear Convex Anal. 2021, 22, 1501–1520. [Google Scholar]
- Srivastava, H.M. An introductory overview of fractional-calculus operators based upon the fox-wright and related higher transcendental functions. J. Adv. Engrg. Comput. 2021, 5, 135–166. [Google Scholar] [CrossRef]
- Srivastava, H.M. Fractional-order derivatives and integrals: Introductory overview and recent developments. Kyungpook Math. J. 2020, 60, 73–116. [Google Scholar]
- Li, Y.R.; Wang, F.; Zheng, Z.W. Adaptive synchronization-based approach for finite-time parameters identification of genetic regulatory networks. Neural Process. Lett. 2022, 54, 3141–3156. [Google Scholar] [CrossRef]
- Wang, H.; Yu, Y.; Wen, G.; Zhang, S.; Yu, J. Global stability analysis of fractional-order Hopfield neural networks with time delay. Neurocomputing 2015, 154, 15–23. [Google Scholar] [CrossRef]
- Li, H.L.; Jiang, Y.L.; Wang, Z.; Zhang, L.; Teng, Z. Global Mittag–Leffler stability of coupled system of fractional-order differential equations on network. Appl. Math. Comput. 2015, 270, 269–277. [Google Scholar] [CrossRef]
- Chen, J.J.; Zeng, Z.G.; Jiang, P. Global Mittag–Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef]
- Bao, H.B.; Cao, J.D. Projective synchronization of fractional-order memristor-based neural networks. Neural Netw. 2015, 63, 1–9. [Google Scholar] [CrossRef]
- Jiang, M.H.; Wang, S.T.; Mei, J.; Shen, Y.J. Finite-time synchronization control of a class of memristor-based recurrent neural networks. Neural Netw. 2015, 63, 133–140. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Wu, R.; Cao, J.; Liu, J.B. Stability and synchronization of memristor-based fractional-order delayed neural networks. Neural Netw. 2015, 71, 37–44. [Google Scholar] [CrossRef]
- Velmurugan, G.; Rakkiyappan, R. Hybrid projective synchronization of fractional-order memristor-based neural networks with time delays. Nonlinear Dyn. 2016, 83, 419–432. [Google Scholar] [CrossRef]
- Velmurugan, G.; Rakkiyappan, R.; Cao, J.D. Finite-time synchronization of fractional-order memristor-based neural networks with time delays. Neural Netw. 2016, 73, 36–46. [Google Scholar] [CrossRef]
- Chen, L.P.; Cao, J.D.; Wu, R.C.; Machado, J.A.T.; Lopes, A.M. Stability and synchronization of fractional-order memristive neural networks with multiple delays. Neural Netw. 2017, 94, 76–85. [Google Scholar] [CrossRef]
- Huang, X.; Fan, Y.; Jia, J.; Wang, Z.; Li, Y. Quasi-synchronisation of fractional-order memristor-based neural networks with parameter mismatches. IET Control. Theory Appl. 2017, 11, 2317–2327. [Google Scholar] [CrossRef]
- Du, F.F.; Lu, J.G. New criterion for finite-time synchronization of fractional order memristor-based neural networks with time delay. Appl. Math. Comput. 2021, 389, 125616. [Google Scholar] [CrossRef]
- Filippov, A. Differential Equations with Discontinuous Right-Hand Side; Mathematics and Its Applications (Soviet Series); Kluwer Academic: Boston, MA, USA, 1988. [Google Scholar]
- Liu, P.; Zeng, Z.; Wang, J. Multiple Mittag–Leffler stability of fractional-order recurrent neural networks. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2279–2288. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.; Gallegos, J. Lyapunov functions for fractional orer systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Boyd, S.; Ghaoui, L.E.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, H.; Tang, J.; Shi, K.; Zhao, Y. Hybrid Impulsive Feedback Control for Drive–Response Synchronization of Fractional-Order Multi-Link Memristive Neural Networks with Multi-Delays. Fractal Fract. 2023, 7, 495. https://doi.org/10.3390/fractalfract7070495
Fan H, Tang J, Shi K, Zhao Y. Hybrid Impulsive Feedback Control for Drive–Response Synchronization of Fractional-Order Multi-Link Memristive Neural Networks with Multi-Delays. Fractal and Fractional. 2023; 7(7):495. https://doi.org/10.3390/fractalfract7070495
Chicago/Turabian StyleFan, Hongguang, Jiahui Tang, Kaibo Shi, and Yi Zhao. 2023. "Hybrid Impulsive Feedback Control for Drive–Response Synchronization of Fractional-Order Multi-Link Memristive Neural Networks with Multi-Delays" Fractal and Fractional 7, no. 7: 495. https://doi.org/10.3390/fractalfract7070495