
Bifurcations and the Exact Solutions of the Time-Space Fractional Complex Ginzburg-Landau Equation with Parabolic Law Nonlinearity

Abstract
:1. Introduction
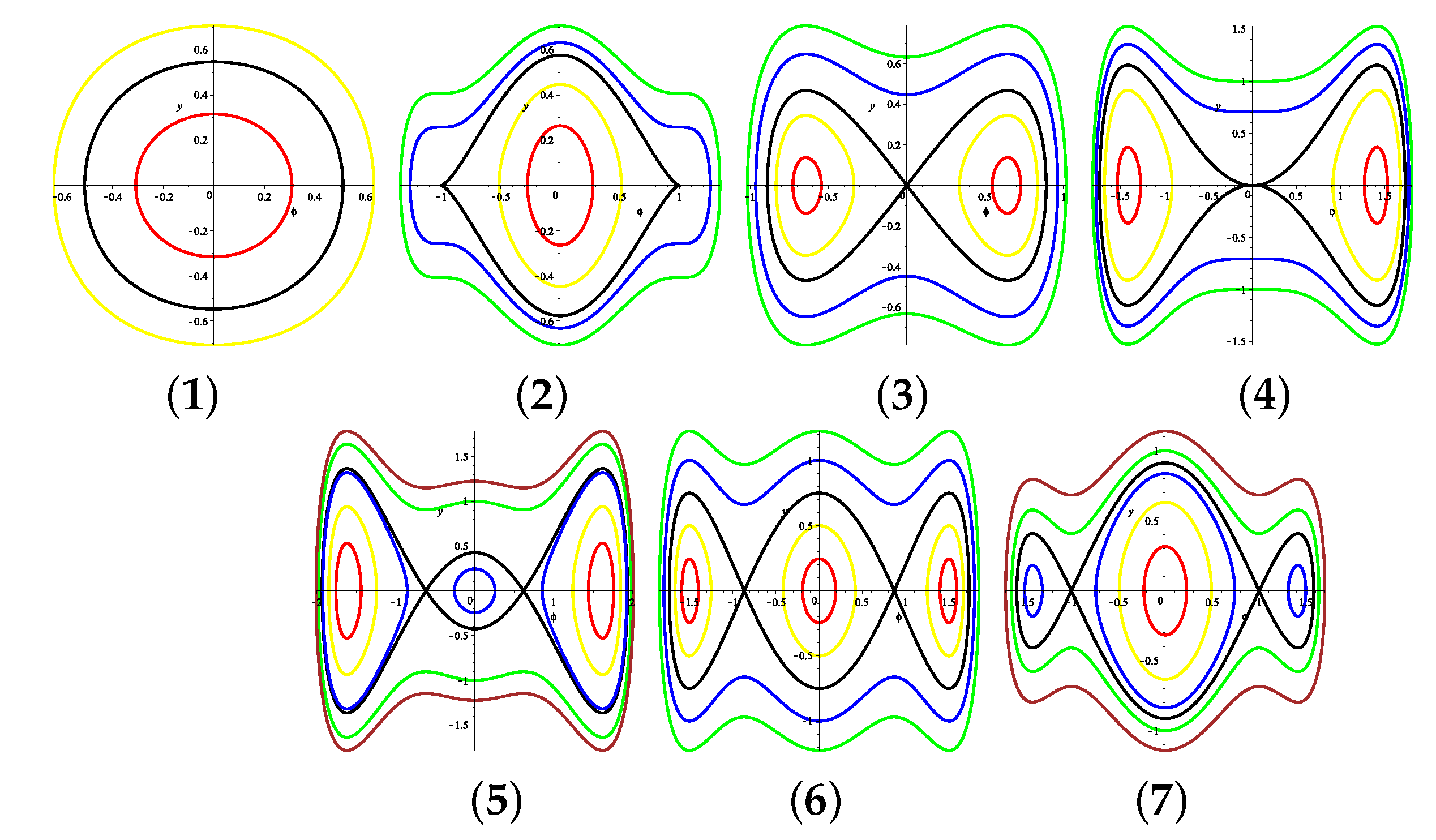
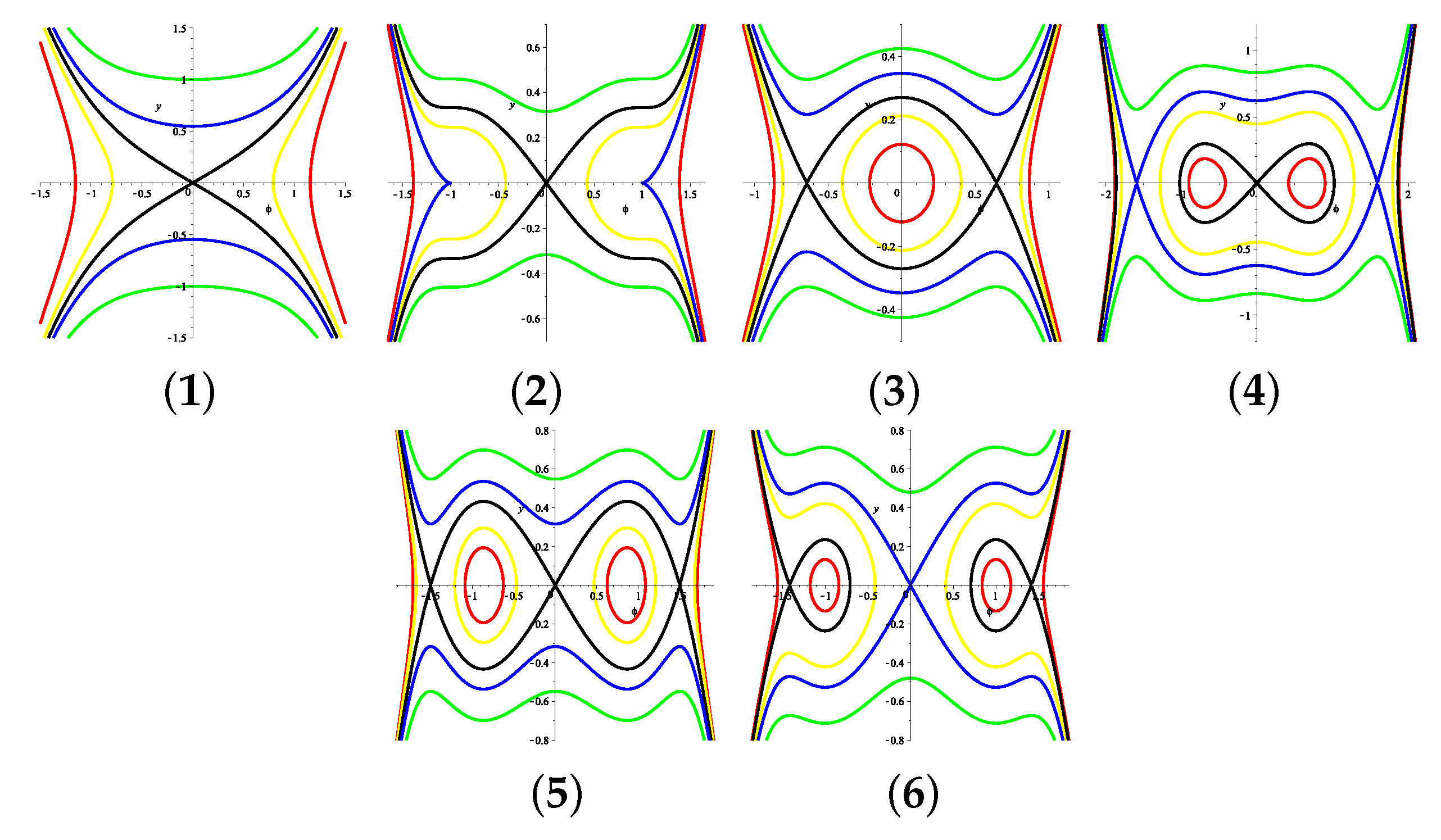
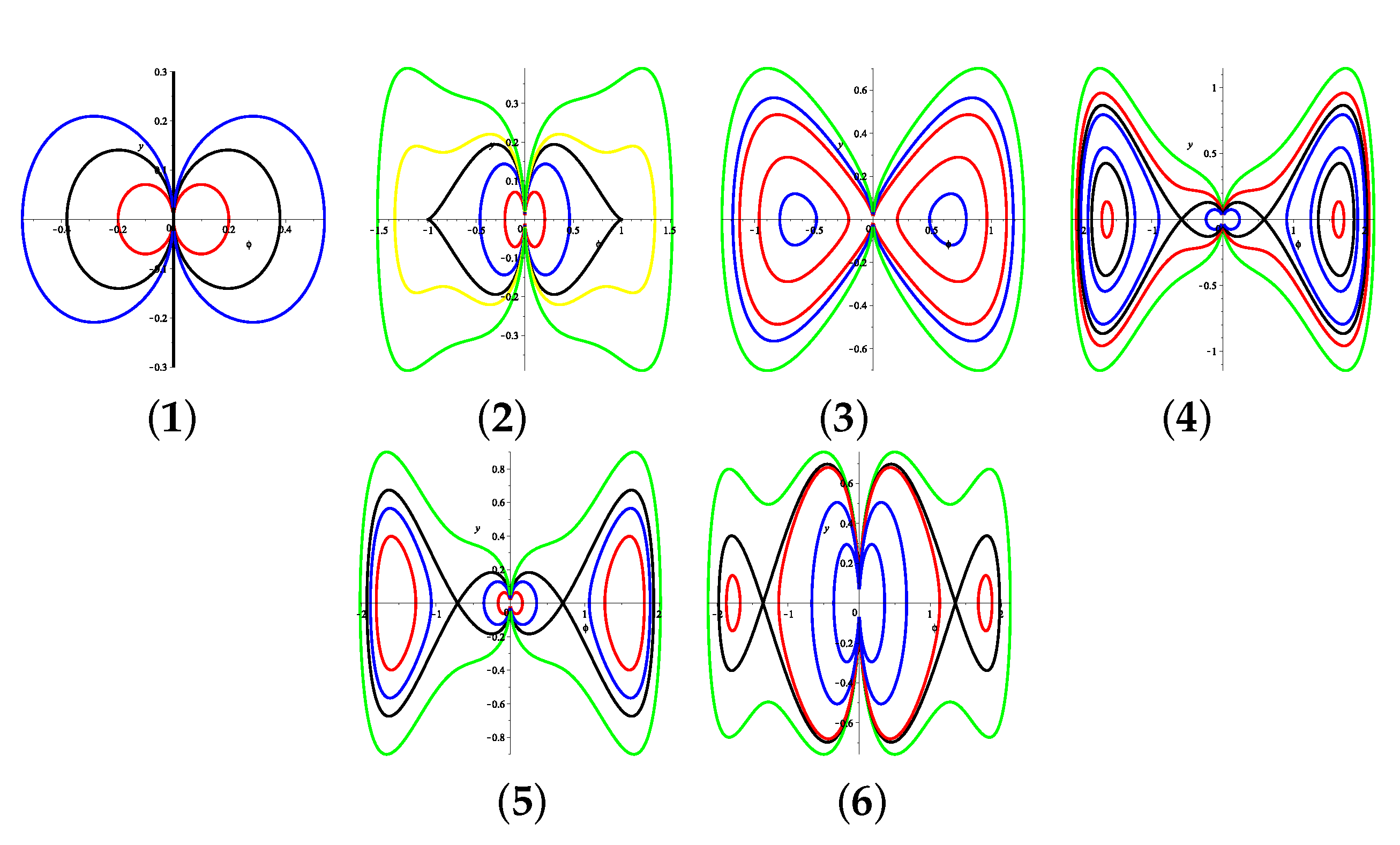
2. Bifurcations of Phase Portraits of System (5)
3. Expressions of the Traveling Wave Solutions of System (5) if
3.1. The Parameter Condition of (See Figure 1(2))
3.2. The Parameter Condition of (See Figure 1(3))
3.3. The Parameter Condition of (See Figure 1(4))
3.4. The Parameter Condition of (See Figure 1(5))
3.5. The Parameter Condition of (See Figure 1(6))
3.6. The Parameter Condition of (See Figure 1(7))
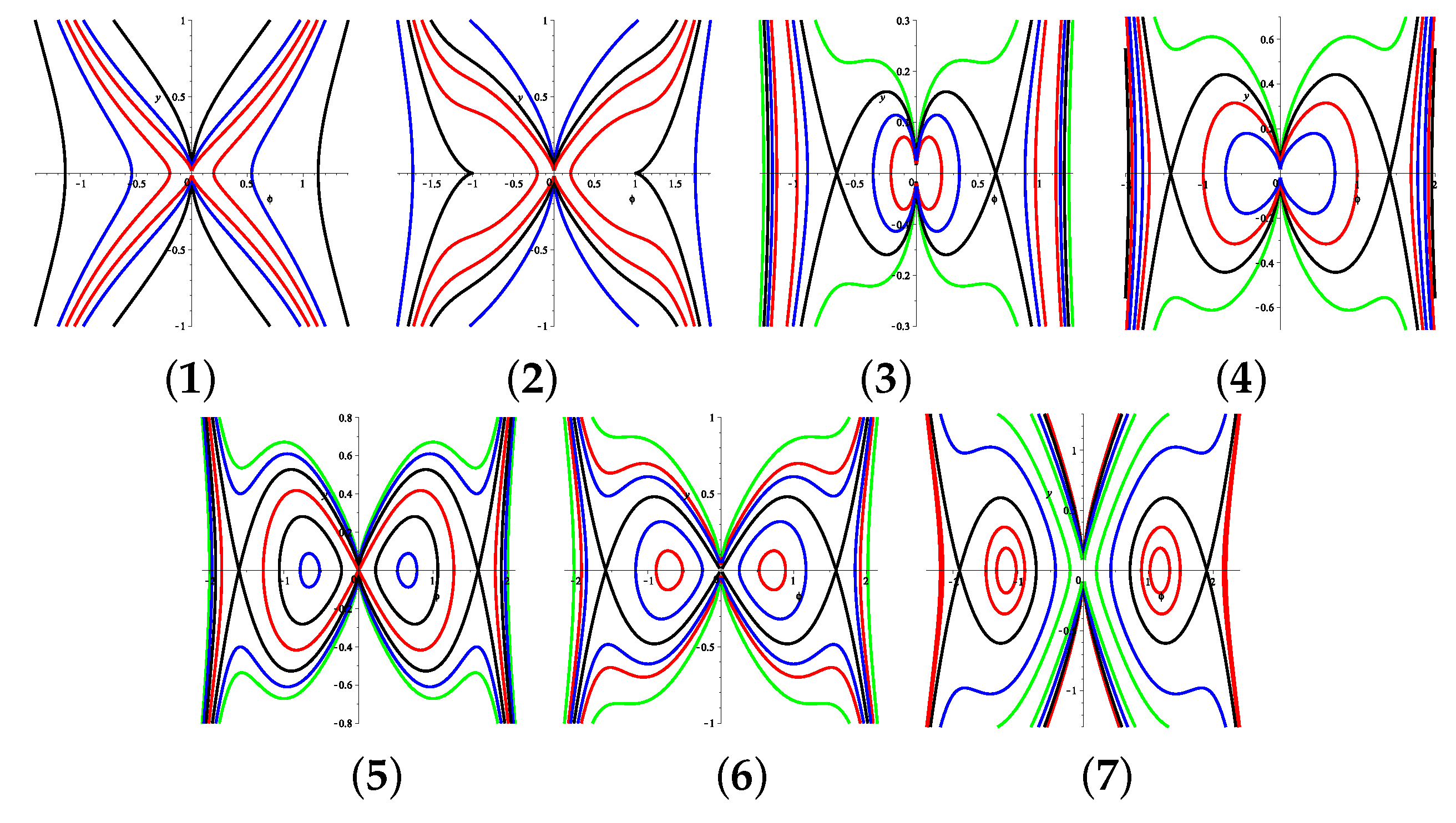
3.7. The Parameter Condition of (See Figure 2(3))
3.8. The Parameter Condition of (See Figure 2(4))
3.9. The Parameter Condition of (See Figure 2(5))
3.10. The Parameter Condition of (See Figure 2(6))
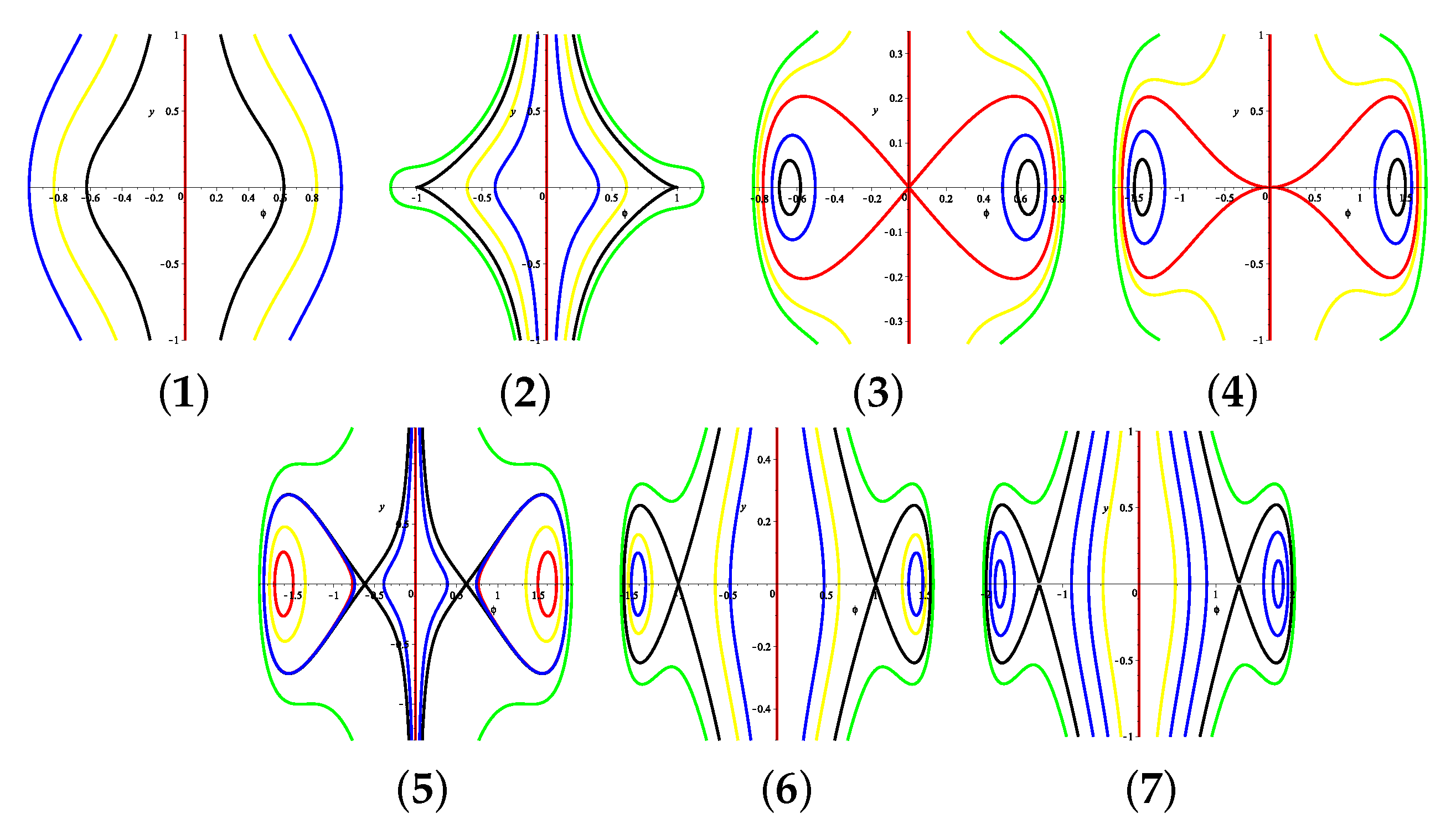
4. Expressions of the Traveling Wave Solutions of System Equation (5) under
4.1. The Parameter Condition of (See Figure 3(3))
4.2. The Parameter Condition of (See Figure 3(4))
4.3. The Parameter Condition of (See Figure 3(5))
4.4. The Parameter Condition of (See Figure 3(6))
4.5. The Parameter Condition of (See Figure 3(7))
4.6. The Parameter Condition of (See Figure 4(3))
4.7. The Parameter Condition of (See Figure 4(4))
4.8. The Parameter Condition of (See Figure 4(5))
4.9. The Parameter Condition of (See Figure 4(6))
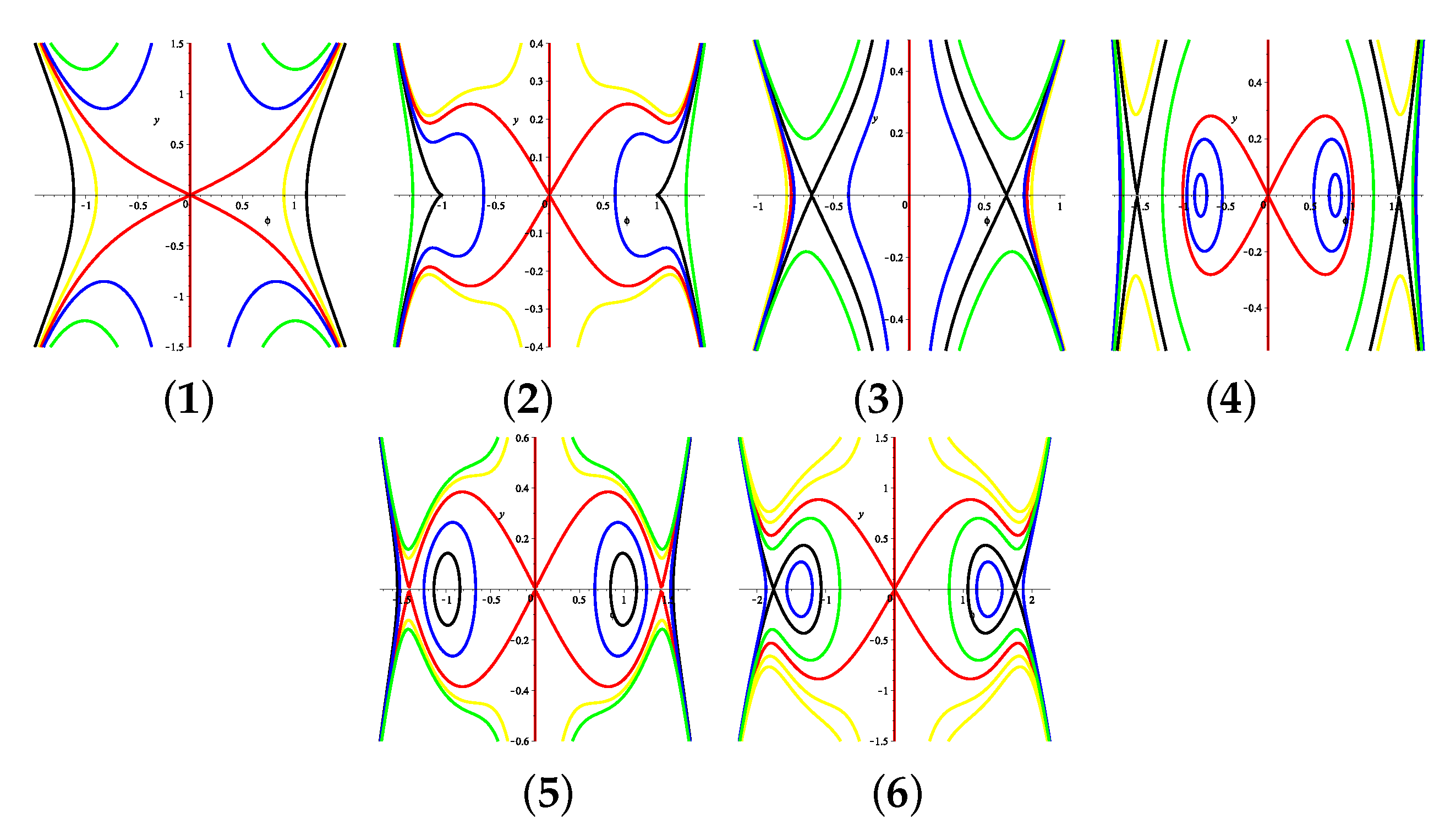
5. Expressions of the Traveling Wave Solutions of System Equation (5) under
5.1. The Parameter Condition of (See Figure 5(4))
5.2. The Parameter Condition of (See Figure 5(5))
5.3. The Parameter Condition of (See Figure 5(6))
5.4. The Case of (See Figure 6(3))
5.5. The Parameter Condition of (See Figure 6(5))
5.6. The Parameter Condition of (See Figure 6(7))
6. Main Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Weitzner, H.; Zaslavsky, G.M. Some applications of fractional equations. Commun. Nonlinear Sci. and Numer. Simul. 2003, 8, 273–281. [Google Scholar] [CrossRef] [Green Version]
- Tarasov, V.E. Fractional dynamics. In Nonlinear Physical Science; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Tarasov, V.E.; Zaslavsky, G.M. Fractional Ginzburg-Landau equation for fractal media. Physica A 2005, 354, 249–261. [Google Scholar] [CrossRef] [Green Version]
- Abdou, M.A.; Soliman, A.A.; Biswas, A.; Ekici, M.; Zhou, Q.; Moshokoa, S.P. Dark-singular combo optical solitons with fractional complex Ginzburg-Landau equation. Optik 2018, 171, 463–467. [Google Scholar] [CrossRef]
- Arshed, S. Soliton solutions of fractional complex Ginzburg-Landau equation with Kerr law and non-Kerr law media. Optik 2018, 160, 322–332. [Google Scholar] [CrossRef]
- Fang, J.; Mou, D.; Wang, Y.; Zhang, H.; Dai, C.; Chen, Y. Soliton dynamics based on exact solutions of conformable fractional discrete complex cubic Ginzburg-Landau equation. Results Phys. 2021, 20, 103710. [Google Scholar] [CrossRef]
- Li, L.; Jin, L.; Fang, S. Large time behavior for the fractional Ginzburg-Landau equations near the BCS-BEC crossover regime of Fermi gases. Bound. Value Probl. 2017, 2017.1, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Lu, H.; Bates, P.W.; Lü, S.; Zhang, M. Dynamics of the 3-D fractional complex Ginzburg-Landau equation. Differ. Equ. 2015, 259, 5276–5301. [Google Scholar] [CrossRef]
- Milovanov, A.; Rasmussen, J. Fractional generalization of the Ginzburg-Landau equation: An unconventional approach to critical phenomena in complex media. Phys. Lett. A 2005, 337, 75–80. [Google Scholar] [CrossRef] [Green Version]
- Mvogo, A.; Tambue, A.; Ben-Bolie, G.; Kofane, T. Localized numerical impulse solutions in diffuse neural networks modeled by the complex fractional Ginzburg-Landau equation. Commun. Nonlinear Sci. 2016, 39, 396–410. [Google Scholar] [CrossRef]
- Pu, X.; Guo, B. Well-posedness and dynamics for the fractional Ginzburg-Landau equation. Appl. Anal. 2013, 92, 318–334. [Google Scholar] [CrossRef]
- Qiu, Y.; Malomed, B.A.; Mihalache, D.; Zhu, X.; Zhang, L.; He, Y. Soliton dynamics in a fractional complex Ginzburg-Landau model. Chaos Solitons Frcatals 2020, 131, 109471. [Google Scholar] [CrossRef] [Green Version]
- Raza, N. Exact periodic and explicit solutions of the conformable time fractional Ginzburg-Landau equation. Opt. Quant. Electron. 2018, 50, 154. [Google Scholar] [CrossRef]
- Sadaf, M.; Akram, G.; Dawood, M. An investigation of fractional complex Ginzburg-Landau equation with Kerr law nonlinearity in the sense of conformable, beta and M-truncated derivatives. Opt. Quantum Electron. 2022, 54, 248. [Google Scholar] [CrossRef]
- Zhu, W.; Xia, Y.; Zhang, B.; Bai, Y. Exact traveling wave solutions and bifurcations of the time fractional differential equations with applications. Internat. J. Bifur. Chaos 2019, 29, 1950041. [Google Scholar] [CrossRef]
- Chen, A.; Tian, C.; Huang, W. Periodic solutions with equal period for the Friedmann-Robertson-Walker model. Appl. Math. Lett. 2018, 77, 101–107. [Google Scholar] [CrossRef]
- Chen, A.; Guo, L.; Huang, W. Existence of kink waves and periodic waves for a perturbed defocusing mKdV equation. Qual. Theory Dyn. Syst. 2018, 17, 495–517. [Google Scholar] [CrossRef]
- Sun, X.; Yu, P. Periodic traveling waves in a generalized BBM equation with weak backward diffusion and dissipation terms. Discret. Contin. Dyn. Syst. 2019, 24, 965–987. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Huang, W.; Cai, J. Coexistence of the solitary and periodic waves in convecting shallow water fluid. Nonlinear Anal. Real World Appl. 2020, 53, 103067. [Google Scholar] [CrossRef]
- Ge, J.; Du, Z. The solitary wave solutions of the nonlinear perturbed shallow water wave model. Appl. Math. Lett. 2020, 103, 106202. [Google Scholar] [CrossRef]
- Chen, A.; Guo, L.; Deng, X. Existence of solitary waves and periodic waves for a perturbed generalized BBM equation. J. Differ. Equ. 2016, 261, 5324–5349. [Google Scholar] [CrossRef]
- Du, Z.; Li, J.; Li, X. The existence of solitary wave solutions of delayed Camassa-Holm equation via a geometric approach. J. Funct. Anal. 2018, 275, 988–1007. [Google Scholar] [CrossRef]
- Zhu, K.; Shen, J. Smooth travelling wave solutions in a generalized Degasperis-Procesi equation. Commun. Nonl. Sci. Numer. Simulat. 2021, 98, 105763. [Google Scholar] [CrossRef]
- Song, Y.; Tang, X. Stability, Steady-state bifurcations, and turing patterns in a predator-prey model with herd behavior and prey-taxis. Stud. Appl. Math. 2017, 139, 371–404. [Google Scholar] [CrossRef]
- Song, Y.; Wu, S.; Wang, H. Spatiotemporal dynamics in the single population modelwith memory-based diffusion and nonlocal effect. J. Differ. Equ. 2019, 267, 6316–6351. [Google Scholar] [CrossRef]
- Chen, H.; Duan, S.; Tang, Y.; Xie, J. Global dynamics of a mechanical system with dry friction. J. Differ. Equ. 2018, 265, 5490–5519. [Google Scholar] [CrossRef]
- Chen, H.; Li, Z.; Zhang, R. A sufficient and necessary condition of generalized polynomial Liénard systems with global centers. arXiv 2022, arXiv:2208.06184. [Google Scholar]
- Chen, H.; Llibre, J.; Tang, Y. Global dynamics of a SD oscillator. Nonlinear Dyn. 2018, 91, 1755–1777. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Tang, Y. At most two limit cycles in a piecewise linear differential system with three zones and asymmetry. Phys. D Nonlinear Phenom. 2019, 386, 23–30. [Google Scholar] [CrossRef]
- Deng, X. Travelling wave solutions for the generalized Burgers-Huxley equation. Appl. Math. Comput. 2008, 204, 733–737. [Google Scholar] [CrossRef]
- Li, J. Singular Nonlinear Travelling Wave Equations: Bifurcations and Exact Solutions; Science Press: Beijing, China, 2013. [Google Scholar]
- Li, J.; Chen, G. On a class of singular nonlinear traveling wave equations. Int. J. Bifurcation Chaos 2007, 17, 4049–4065. [Google Scholar] [CrossRef]
- Li, J.; Qiao, Z. Peakon, pseudo-peakon, and cuspon solutions for two generalized Cammasa-Holm equations. J. Math. Phys. 2013, 54, 123501. [Google Scholar] [CrossRef] [Green Version]
- He, B.; Meng, Q.; Long, Y.; Rui, W. New exact solutions of the double sine-Gordon equation using symbolic computations. Appl. Math. Comput. 2007, 186, 1334–1346. [Google Scholar]
- Meng, Q.; He, B.; Long, Y.; Rui, W. Bifurcations of travelling wave solutions for a general sine-Gordon equation. Chaos Solitons Fractals 2006, 29, 483–489. [Google Scholar] [CrossRef]
- Wen, Z. Bifurcations and exact traveling wave solutions of a new two-component system. Nonlinear Dyn. 2017, 87, 1917–1922. [Google Scholar] [CrossRef]
- Wu, L.; He, G.; Geng, X. Quasi-periodic solutions to the two-component nonlinear Klein-Gordon equation. J. Geom. Phys. 2013, 66, 1–17. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, Y.; Li, J. Exact solitary wave and periodic-peakon solutions of the complex Ginzburg-Landau equation: Dynamical system approach. Math. Comput. Simul. 2022, 191, 157–167. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, L. Bifurcations of traveling wave solutions for the nonlinear Schrödinger equation with fourth-order dispersion and cubic-quintic nonlieararity. J. Appl. Anal. Comput. 2020, 10, 2722–2733. [Google Scholar]
- Zhang, L.; Huang, W. Breaking wave solutions of a short wave model. Results Phys. 2019, 15, 102733. [Google Scholar] [CrossRef]
- Zhang, L. Nilpotent singular points and smooth periodic wave solutions. Proc. Rom. Acad. Ser. A 2019, 20, 3–9. [Google Scholar]
- Zhu, W.; Xia, Y.; Bai, Y. Traveling wave solutions of the complex Ginzburg-Landau equation with Kerr law nonlinearity. Appl. Math. Comput. 2020, 382, 125342. [Google Scholar] [CrossRef]
- Feng, D.H.; Li, J.; Jiao, J. Dynamical behavior of singular traveling waves of (n+1)-dimensional nonlinear Klein-Gordon equation. Qual. Theor. Dyn. Syst. 2019, 18, 265–287. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Ling, Z.; Xia, Y.; Gao, M. Bifurcations and the Exact Solutions of the Time-Space Fractional Complex Ginzburg-Landau Equation with Parabolic Law Nonlinearity. Fractal Fract. 2023, 7, 201. https://doi.org/10.3390/fractalfract7020201
Zhu W, Ling Z, Xia Y, Gao M. Bifurcations and the Exact Solutions of the Time-Space Fractional Complex Ginzburg-Landau Equation with Parabolic Law Nonlinearity. Fractal and Fractional. 2023; 7(2):201. https://doi.org/10.3390/fractalfract7020201
Chicago/Turabian StyleZhu, Wenjing, Zijie Ling, Yonghui Xia, and Min Gao. 2023. "Bifurcations and the Exact Solutions of the Time-Space Fractional Complex Ginzburg-Landau Equation with Parabolic Law Nonlinearity" Fractal and Fractional 7, no. 2: 201. https://doi.org/10.3390/fractalfract7020201