
Enhancing Operational Police Training in High Stress Situations with Virtual Reality: Experiences, Tools and Guidelines

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Requirement Workshops
2.2. Human Factor Studies
2.3. End-User Feedback Studies
2.4. Field Trials
3. Results and Discussion
3.1. Foundation of Technical Guidelines
3.1.1. Theoretical Basis for DMA VR Training
- DMA is an integrated process between cognition and movement. Hence, VR systems need to provide police officers with the opportunity to move about freely and realistically.
- DMA behavior depends on the available action possibilities. Hence, the VR system should allow police officers to perform a variety of actions (e.g., multiple types of force).
- DMA behavior is influenced by human factors such as personal factors (e.g., personal stressors, physical strain) and contextual factors (e.g., implementing the ‘unexpected’, bystanders, sensory elements) [28]. Hence, the VR system should include and display a variety of relevant human factors in the training environment.
- DMA behavior is influenced by a shift in attentional processes, mostly between task-relevant, goal-directed and task-irrelevant, threat-related information. Hence, in VR, the training environment should include information that helps a police officer solve a scenario as well as information that may be distracting from the goal (e.g., loud music, clutter, multiple bystanders).
3.1.2. Training Objectives in VR
3.1.3. Training Delivery in VR
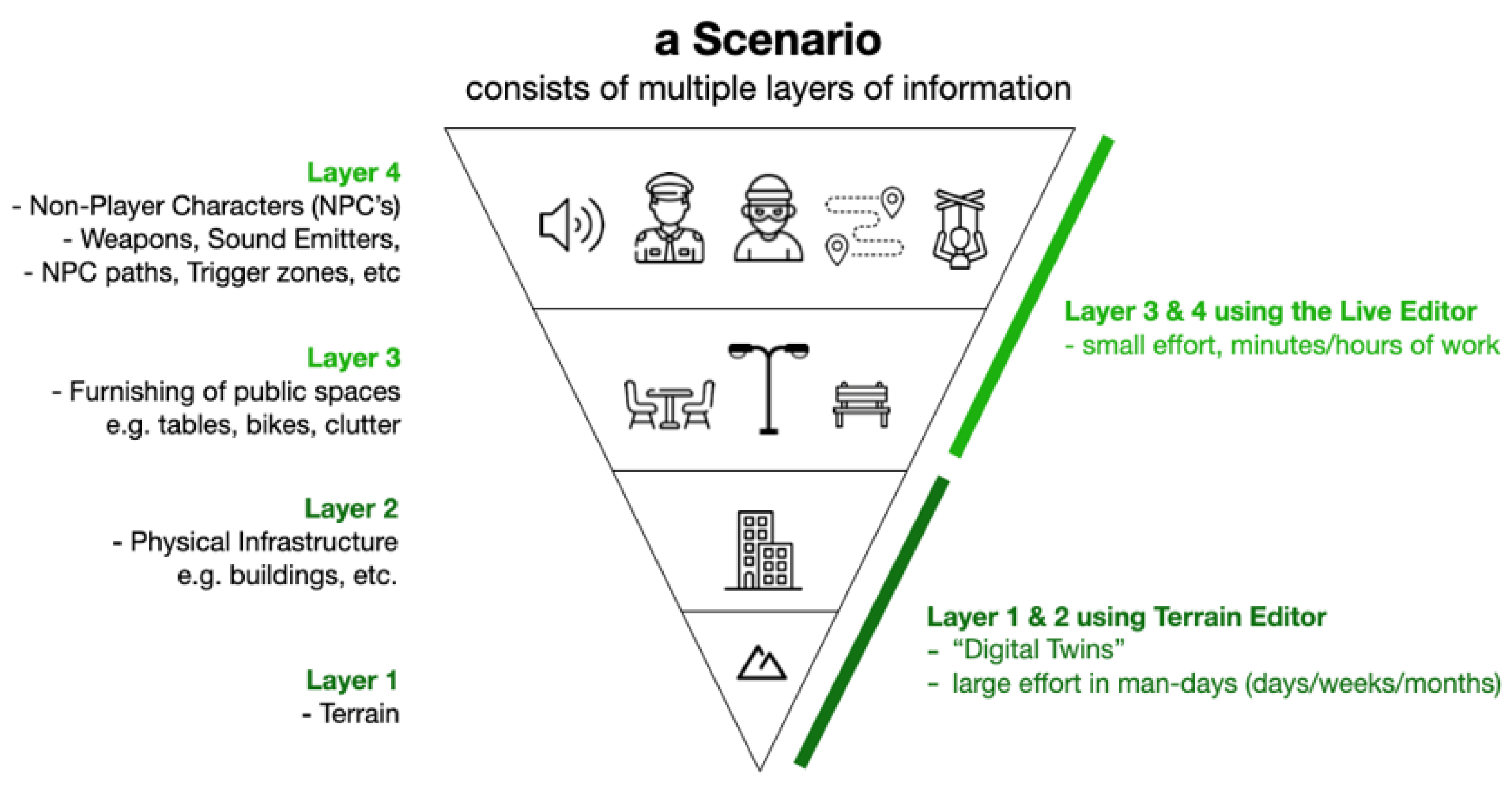
3.1.4. Scenario Design and Live Editor
3.2. Realism and Immersion
3.2.1. Movement
3.2.2. Spatial Sound
3.2.3. Physical Props
- Handgun: realistic model (size, form and weight as well as realistic behavior regarding trigger pulling and changing of magazine).
- Pepper spray: including realistic functionality (infinite spraying capacity or need to re-fill after a certain amount of usage) and effect (if used inside a room, the trainee will have limited visibility for a short amount of time and NPCs need to react accordingly e.g., hands in front of their eyes).
- Electroshock gun: this tangible device fires a single or a double shot (trainers can select mode for each trainee or on group level).
- Baton: length of a retracted baton that can be virtually expanded.
- Handcuffs: handcuffing an NPC is still a challenge because trainees don’t have the physical arms to place them. Currently, they need to be held towards the opponent’s hands until a “success” message is displayed.
- Flashlight: including an on/off switch to which the VE and its lighting reacts accordingly.
3.2.4. Multisensory Experience
3.3. Responsive Worlds
3.3.1. Multi-User and Interaction Modalities
3.3.2. Non-Player Characters
3.3.3. Role-Player Characters and Live Interactions
3.4. Beyond Novelty—Human Factors and Performance
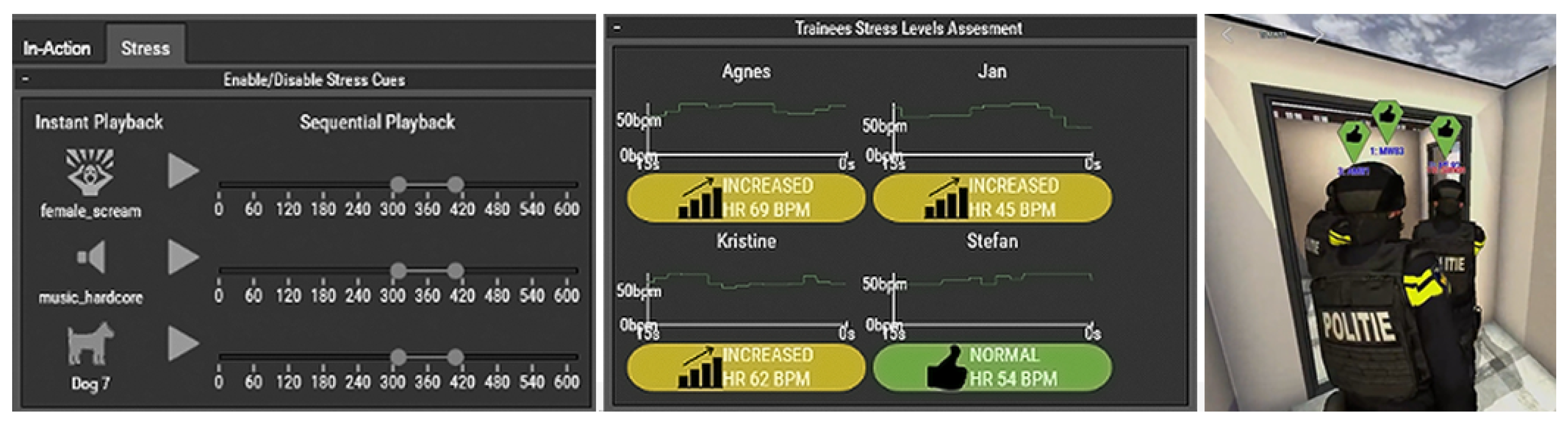
3.4.1. Stress Factors for Police Officers
3.4.2. Stress Dashboard
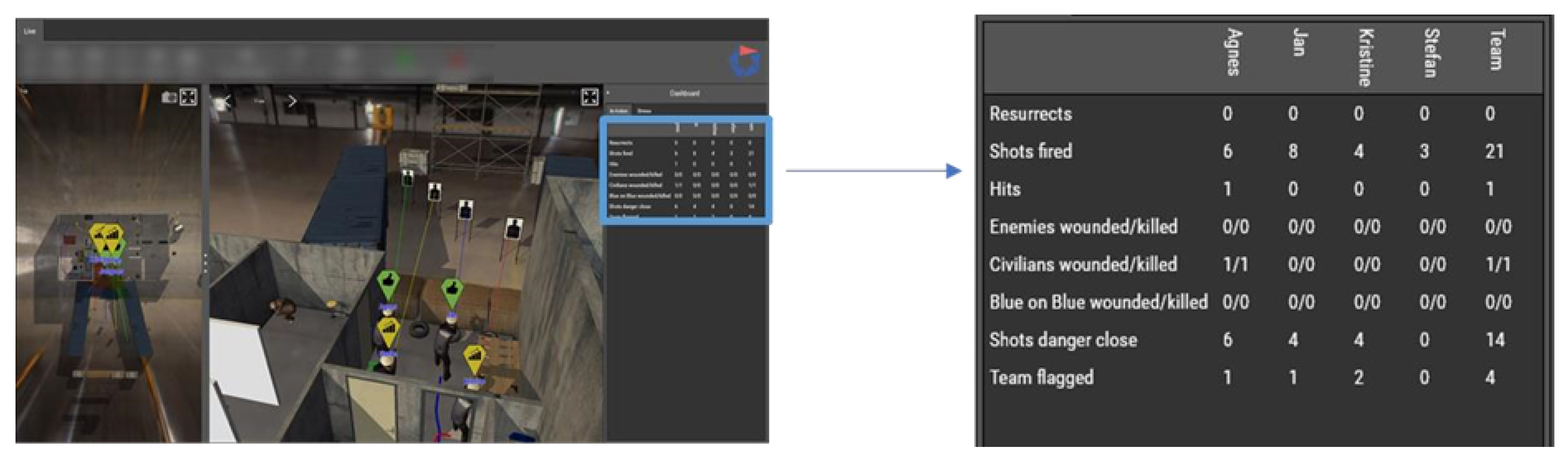
3.4.3. Performance Monitoring and Management
- Physical positions, motion and pose of trainees and NPCs
- Trainee walking paths
- Line of sight
- Field of view
- Firing events
- Firing lines
- Impacts
- Radio chatter and other sound
3.4.4. Ethics
4. Future Work
4.1. Inclusive Performance Management System and Training Personalization
- Higher engagement through challenging yet accomplishable scenarios
- Better retention through enough repetition and training of the right difficulty level
- Targeted training to rank, location and experience level
- Motivation to pursue learning
- Trainee satisfaction
4.2. Artificial Intelligence and Machine Learning Enhanced VR Training
4.3. High-End Content Streaming
4.4. Multi-Sensory VR Experiences
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AAR | After-Action Review |
| AI | Artificial Intelligence |
| CBRNE | Chemical, Biological, Radiological, Nuclear, and high yield Explosives |
| DMA | Decision-making and acting |
| DMA-SR | Decision-making and acting under stress and in high risk situations |
| ECG | Electrocardiogram |
| EDA | Electrodermal Activity |
| EEG | Electroencephalogram |
| EMG | Electromyography |
| HF model | Human factors model of police officer’s DMA under stress and in high-risk situations |
| HR | Heart rate |
| HRV | Hear rate variability |
| KPI | Key Performance Indicator |
| LEA | Law Enforcement Agency |
| ML | Machine Learning |
| NPC | Non-Player Character |
| PTSD | Post-Traumatic Stress Disorder |
| QoE | Quality of Experience |
| QoLE | Quality of Learning Experience |
| RMSSD | Root mean square of successive differences between normal heartbeats |
| SD | Standard deviation |
| SOPI | Sense of Presence Inventory |
| TAS | Technology Acceptance Scale |
| VAS | Visual Analogue Scale |
| VE | Virtual Environment |
| VR | Virtual Reality |
References
- Baldwin, S.; Bennell, C.; Andersen, J.P.; Semple, T.; Jenkins, B. Stress-activity mapping: Physiological responses during general duty police encounters. Front. Psychol. 2019, 10, 2216. [Google Scholar] [CrossRef] [PubMed]
- Raab, M. Motor heuristics and embodied choices: How to choose and act. Curr. Opin. Psychol. 2017, 16, 34–37. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Araújo, D.; Hristovski, R.; Seifert, L.; Carvalho, J.; Davids, K. Ecological cognition: Expert decision-making behaviour in sport. Int. Rev. Sport Exerc. Psychol. 2019, 12, 1–25. [Google Scholar] [CrossRef]
- Andersen, J.P.; Gustafsberg, H. A training method to improve police use of force decision making: A randomized controlled trial. Sage Open 2016, 6, 2158244016638708. [Google Scholar] [CrossRef] [Green Version]
- Nieuwenhuys, A.; Oudejans, R.R. Training with anxiety: Short-and long-term effects on police officers’ shooting behavior under pressure. Cogn. Process. 2011, 12, 277–288. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nieuwenhuys, A.; Oudejans, R.R. Anxiety and perceptual-motor performance: Toward an integrated model of concepts, mechanisms, and processes. Psychol. Res. 2012, 76, 747–759. [Google Scholar] [CrossRef] [Green Version]
- Nieuwenhuys, A.; Oudejans, R.R. Anxiety and performance: Perceptual-motor behavior in high-pressure contexts. Curr. Opin. Psychol. 2017, 16, 28–33. [Google Scholar] [CrossRef]
- Kleygrewe, L.; Oudejans, R.R.; Koedijk, M.; Hutter, R. Police Training in Practice: Organization and Delivery According to European Law Enforcement Agencies. Front. Psychol. 2022, 6515. [Google Scholar] [CrossRef]
- Rao, H.M.; Khanna, R.; Zielinski, D.J.; Lu, Y.; Clements, J.M.; Potter, N.D.; Sommer, M.A.; Kopper, R.; Appelbaum, L.G. Sensorimotor learning during a marksmanship task in immersive virtual reality. Front. Psychol. 2018, 9, 58. [Google Scholar] [CrossRef] [Green Version]
- Muñoz, J.E.; Quintero, L.; Stephens, C.L.; Pope, A.T. A Psychophysiological Model of Firearms Training in Police Officers: A Virtual Reality Experiment for Biocybernetic Adaptation. Front. Psychol. 2020, 11, 683. [Google Scholar] [CrossRef]
- Farra, S.L.; Gneuhs, M.; Hodgson, E.; Kawosa, B.; Miller, E.T.; Simon, A.; Timm, N.; Hausfeld, J. Comparative Cost of Virtual Reality Training and Live Exercises for Training Hospital Workers for Evacuation. CIN Comput. Inform. Nurs. 2019, 37, 446–454. [Google Scholar] [CrossRef] [PubMed]
- Grabowski, A.; Jankowski, J. Virtual Reality-based pilot training for underground coal miners. Saf. Sci. 2015, 72, 310–314. [Google Scholar] [CrossRef]
- Schwarz, S.; Regal, G.; Kempf, M.; Schatz, R. Learning Success in Immersive Virtual Reality Training Environments: Practical Evidence from Automotive Assembly. In Proceedings of the 11th NordiCHI Conference on Human-Computer Interaction: Shaping Experiences, Shaping Society, Tallinn, Estonia, 25–29 October 2020. [Google Scholar] [CrossRef]
- Fowlkes, J.; Schatz, S.; Stagl, K.C. Instructional strategies for scenario-based training: Insights from applied research. In Proceedings of the 2010 Spring Simulation Multiconference, Orlando, FL, USA, 11–15 April 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Murtinger, M.; Jaspaert, E.; Schrom-Feiertag, H.; Egger-Lampl, S. CBRNe training in virtual environments: SWOT analysis & practical guidelines. Int. J. Saf. Secur. Eng. 2021, 11, 295–303. [Google Scholar] [CrossRef]
- Ticknor, B.; Tillinghast, S. Virtual reality and the criminal justice system: New possibilities for research, training, and rehabilitation. J. Virtual Worlds Res. 2011, 4. [Google Scholar] [CrossRef] [Green Version]
- Murtinger, M.; Uhl, J.; Schrom-Feiertag, H.; Nguyen, Q.; Harthum, B.; Tscheligi, M. Assist the VR Trainer—Real-Time Dashboard and After-Action Review for Police VR Training. In Proceedings of the 2022 IEEE International Conference on Metrology for Extended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), Rome, Italy, 26–28 October 2022; pp. 69–74. [Google Scholar] [CrossRef]
- Giessing, L. The Potential of Virtual Reality for Police Training Under Stress. In Interventions, Training, and Technologies for Improved Police Well-Being and Performance; IGI Global: Hershey, PA, USA, 2021; pp. 102–124. [Google Scholar] [CrossRef]
- Nguyen, Q.; Jaspaert, E.; Murtinger, M.; Schrom-Feiertag, H.; Egger-Lampl, S.; Tscheligi, M. Stress Out: Translating Real-World Stressors into Audio-Visual Stress Cues in VR for Police Training. In Human-Computer Interaction (INTERACT 2021); Ardito, C., Lanzilotti, R., Malizia, A., Petrie, H., Piccinno, A., Desolda, G., Inkpen, K., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 551–561. [Google Scholar]
- Uhl, J.C.; Murtinger, M.; Zechner, O.; Tscheligi, M. Threat Assessment in Police VR Training: Multi-Sensory Cues for Situation Awareness. In Proceedings of the 2022 IEEE International Conference on Metrology for Extended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), Rome, Italy, 26–28 October 2022; pp. 432–437. [Google Scholar] [CrossRef]
- Caserman, P.; Schmidt, P.; Gobel, T.; Zinnacker, J.; Kecke, A.; Gobel, S. Impact of Full-Body Avatars in Immersive Multiplayer Virtual Reality Training for Police Forces. IEEE Trans. Games 2022, X, 1–10. [Google Scholar] [CrossRef]
- Binsch, O.; Oudejans, N.; van der Kuil, M.N.; Landman, A.; Smeets, M.M.; Leers, M.P.; Smit, A.S. The effect of virtual reality simulation on police officers’ performance and recovery from a real-life surveillance task. Multimed. Tools Appl. 2022. [Google Scholar] [CrossRef]
- Marler, T.; Straus, S.G.; Mizel, M.L.; Hollywood, J.S.; Harrison, B.; Yeung, D.; Klima, K.; Lewis, M.W.; Rizzo, S.; Hartholt, A.; et al. Effective Game-Based Training for Police Officer Decision-Making: Linking Missions, Skills, and Virtual Content. 2021. Available online: https://www.rand.org/pubs/external_publications/EP68554.html (accessed on 15 December 2022).
- Haskins, J.; Zhu, B.; Gainer, S.; Huse, W.; Eadara, S.; Boyd, B.; Laird, C.; Farantatos, J.J.; Jerald, J. Exploring VR Training for First Responders. In Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces, Atlanta, GA, USA, 22–26 March 2020; pp. 57–62. [Google Scholar] [CrossRef]
- Schneeberger, M.; Paletta, L.; Wolfgang Kallus, K.; Reim, L.; Schönauer, C.; Peer, A.; Feischl, R.; Aumayr, G.; Pszeida, M.; Dini, A.; et al. First Responder Situation Reporting in Virtual Reality Training with Evaluation of Cognitive-emotional Stress using Psychophysiological Measures. Cogn. Comput. Internet Things 2022, 43, 73. [Google Scholar] [CrossRef]
- Sharma, S.; Devreaux, P.; Scribner, D.; Grynovicki, J.; Grazaitis, P. Megacity: A collaborative virtual reality environment for emergency response, training, and decision making. Electron. Imaging 2017, 70–77. [Google Scholar] [CrossRef]
- Narciso, D.; Melo, M.; Raposo, J.V.; Cunha, J.; Bessa, M. Virtual reality in training: An experimental study with firefighters. Multimed. Tools Appl. 2020, 79, 6227–6245. [Google Scholar] [CrossRef]
- Wheeler, S.G.; Engelbrecht, H.; Hoermann, S. Human Factors Research in Immersive Virtual Reality Firefighter Training: A Systematic Review. Front. Virtual Real. 2021, 2, 1–13. [Google Scholar] [CrossRef]
- Regal, G.; Schrom-Feiertag, H.; Nguyen, Q.; Aust, M.; Murtinger, M.; Smit, D.; Tscheligi, M.; Billinghurst, M. VR [We Are] Training—Workshop on Collaborative Virtual Training for Challenging Contexts. In Proceedings of the Extended Abstracts of the 2022 CHI Conference on Human Factors in Computing Systems, New Orleans, LA, USA, 29 April–5 May 2022. [Google Scholar] [CrossRef]
- Pallavicini, F.; Argenton, L.; Toniazzi, N.; Aceti, L.; Mantovani, F. Virtual reality applications for stress management training in the military. Aerosp. Med. Hum. Perform. 2016, 87, 1021–1030. [Google Scholar] [CrossRef]
- Rizzo, A.; Parsons, T.D.; Lange, B.; Kenny, P.; Buckwalter, J.G.; Rothbaum, B.; Difede, J.A.; Frazier, J.; Newman, B.; Williams, J.; et al. Virtual reality goes to war: A brief review of the future of military behavioral healthcare. J. Clin. Psychol. Med. Settings 2011, 18, 176–187. [Google Scholar] [CrossRef]
- Binsch, O.; Bottenheft, C.; Bottenheft, L.; Boonekamp, R.; Valk, P. Using a controlled virtual reality simulation platform to induce, measure and feedback stress responses of soldiers. J. Sci. Med. Sport 2017, 20, S124–S125. [Google Scholar] [CrossRef]
- Kluge, M.G.; Maltby, S.; Walker, N.; Bennett, N.; Aidman, E.; Nalivaiko, E.; Walker, F.R. Development of a modular stress management platform (Performance Edge VR) and a pilot efficacy trial of a bio-feedback enhanced training module for controlled breathing. PLoS ONE 2021, 16, 1–22. [Google Scholar] [CrossRef] [PubMed]
- Clifford, R.M.; McKenzie, T.; Lukosch, S.; Lindeman, R.W.; Hoermann, S. The Effects of Multi-sensory Aerial Firefighting Training in Virtual Reality on Situational Awareness, Workload, and Presence. In Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces, Atlanta, GA, USA, 22–26 March 2020; pp. 93–100. [Google Scholar] [CrossRef]
- Van Weelden, E.; Alimardani, M.; Wiltshire, T.J.; Louwerse, M.M. Advancing the Adoption of Virtual Reality and Neurotechnology to Improve Flight Training. In Proceedings of the 2021 IEEE International Conference on Human-Machine Systems, ICHMS 2021, Magdeburg, Germany, 8–10 September 2021; pp. 8–11. [Google Scholar] [CrossRef]
- Altan, B.; Gürer, S.; Alsamarei, A.; Demir, D.K.; Düzgün, H.; Erkayaoğlu, M.; Surer, E. Developing serious games for CBRN-e training in mixed reality, virtual reality, and computer-based environments. Int. J. Disaster Risk Reduct. 2022, 77, 103022. [Google Scholar] [CrossRef]
- Mossel, A.; Peer, A.; Goellner, J.; Kaufmann, H. Towards an immersive virtual reality training system for CBRN disaster preparedness. In Proceedings of the 5th International Defense and Homeland Security Simulation Workshop, DHSS 2015, Bergeggi, Italy, 21–23 September 2015; pp. 23–32. [Google Scholar]
- Kleygrewe, L.; Hutter, R.; Oudejans, R. No Pain, No Gain?: The Effects of Adding a Pain Stimulus in Virtual Training for Police Officers. Ergonomics 2023. [Google Scholar] [CrossRef] [PubMed]
- Schrom-Feiertag, H.; Murtinger, M.; Zechner, O.; Uhl, J.; Nguyen, Q.; Kemperman, B. D4.5—Real-Time Training Progress Assessment Tool. Technical ReportDeliverable to the European Commission Horizon 2020 Project SHOTPROS. 2021. Available online: https://shotpros.eu/wp-content/uploads/2022/04/SHOTPROS_D4.5-Real-Time-Training-Progress-Assessment-Tool_v1.0.pdf (accessed on 15 December 2022).
- Venkatesh, V.; Bala, H. Technology acceptance model 3 and a research agenda on interventions. Decision Sciences 2008, 39, 273–315. [Google Scholar] [CrossRef] [Green Version]
- Wu, W.; Arefin, A.; Rivas, R.; Nahrstedt, K.; Sheppard, R.; Yang, Z. Quality of experience in distributed interactive multimedia environments: Toward a theoretical framework. In Proceedings of the 2009 ACM Multimedia Conference, with Co-located Workshops and Symposiums, Beijing, China, 19–24 October 2009; pp. 481–490. [Google Scholar] [CrossRef]
- Kirkpatrick, D.; Kirkpatrick, J. Evaluating Training Programs: The Four Levels; Berrett-koehler Series; Berrett-Koehler: San Francisco, CA, USA, 2006. [Google Scholar]
- Lessiter, J.; Freeman, J.; Keogh, E. A Cross-Media Presence Questionnaire. Presence Teleoperators Virtual Environ. 1998, 10, 282–297. [Google Scholar]
- Lesage, F.X.; Berjot, S. Validity of occupational stress assessment using a visual analogue scale. Occup. Med. 2011, 61, 434–436. [Google Scholar] [CrossRef] [Green Version]
- Houtman, I.; Bakker, F. The anxiety thermometer: A validation study. J. Personal. Assess. 1989, 53, 575–582. [Google Scholar] [CrossRef]
- Zijlstra, F.R.H. Efficiency in Work Behaviour: A Design Approach for Modern Tools. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1995. [Google Scholar]
- Haarmeijer, C.; Essink Nijhuis, N.O.; Harthum, B.; Zechner, O. D8.7—Demonstration Tool. Technical ReportDeliverable to the European Commission Horizon 2020 Project SHOTPROS. 2022. Available online: https://shotpros.eu/wp-content/uploads/2023/01/SHOTPROS_D8.7_demonstration_tool_project_showcasing_V1.0.pdf (accessed on 15 December 2022).
- Hutter, R.I.V.; Renden, P.G.; Kok, M.; Oudejans, R.R.D.; Koedijk, M.; Kleygrewe, L. Criteria for high quality training of police officers. In Police Conflict Management; Staller, M.S., Koerner, S., Zaiser, B., Eds.; Palgrave Macmillan; Volume II, Training and Education; in press.
- Kleygrewe, L.; Koedijk, M.; Oudejans, R.R.D.; Hutter, R.I.V.; Schaefer, A.; Maetzing, O. D7.5—SHOTPROS Final Training Curriculum for DMA-SR. Technical ReportDeliverable to the European Commission Horizon 2020 Project SHOTPROS. 2022. Available online: https://shotpros.eu/wp-content/uploads/2023/01/D7.5-SHOTPROS-Final-Training-Curriculum-for-DMA-SR_v1.0.pdf (accessed on 15 December 2022).
- Hutter, R.I.V.; Oudejans, R.R.D.; Koedijk, M.; Kleygrewe, L. D3.2—A Conceptual Human Factors Model of Decision-Making and Acting under Stress and in High-Risk Situations. Technical ReportDeliverable to the European Commission Horizon 2020 Project SHOTPROS. 2021. Available online: https://shotpros.eu/wp-content/uploads/2021/07/SHOTPROS_D3.2_HF-DMA-Model_V2.6.pdf (accessed on 15 December 2022).
- Hutter, R.I.V.; Koedijk, M.; Kleygrewe, L.; Oudejans, R.R.D.; Schaefer, A.; Maetzing, O. D7.4—SHOTPROS Final Evidence-based HF Model for DMA-SR. Technical ReportDeliverable to the European Commission Horizon 2020 Project SHOTPROS. 2022. Available online: https://shotpros.eu/wp-content/uploads/2023/01/D7.4-SHOTPROS-Final-Evidence-based-HF-Model-for-DMA-SR_v1.0.pdf (accessed on 15 December 2022).
- Lazarus, R.S.; Folkman, S. Stress, Appraisal, and Coping; Springer: New York, NY, USA, 1984. [Google Scholar]
- Van Merriënboer, J.J.; Sweller, J. Cognitive load theory and complex learning: Recent developments and future directions. Educ. Psychol. Rev. 2005, 17, 147–177. [Google Scholar] [CrossRef]
- Mugford, R.; Corey, S.; Bennell, C. Improving police training from a cognitive load perspective. Policing 2013, 36, 312–337. [Google Scholar] [CrossRef]
- Scarfe, P.; Glennerster, A. The science behind virtual reality displays. Annu. Rev. Vis. Sci. 2019, 5, 529–547. [Google Scholar] [CrossRef] [PubMed]
- Kleygrewe, L.; Koedijk, M.; Oudejans, R.R.D.; Hutter, R.I.V. D3.3—European Framework for Training and Assessment (using VR) of DMA-SR Behaviour of Professionals. Technical reportDeliverable to the European Commission Horizon 2020 Project SHOTPROS. 2021. Available online: https://shotpros.eu/wp-content/uploads/2022/04/SHOTPROS_D3.3_European_Training_Framework_v1.1.pdf (accessed on 15 December 2022).
- Yerkes, R.M.; Dodson, J.D. The Relation of Strength of Stimulus to Rapidity of Habit-Formation; Editorial Office, Denison University: Granville, OH, USA, 1908. [Google Scholar]
- Koerner, S.; Staller, M.S. Police training revisited—meeting the demands of conflict training in police with an alternative pedagogical approach. Policing 2021, 15, 927–938. [Google Scholar] [CrossRef]
- da Silva Marinho, A.; Terton, U.; Jones, C.M. Cybersickness and postural stability of first time VR users playing VR videogames. Appl. Ergon. 2022, 101, 103698. [Google Scholar] [CrossRef] [PubMed]
- Schäfer, A.; Reis, G.; Stricker, D. Controlling Teleportation-Based Locomotion in Virtual Reality with Hand Gestures: A Comparative Evaluation of Two-Handed and One-Handed Techniques. Electronics 2021, 10, 715. [Google Scholar] [CrossRef]
- Martinez, E.S.; Wu, A.S.; McMahan, R.P. Research Trends in Virtual Reality Locomotion Techniques. In Proceedings of the 2022 IEEE Conference on Virtual Reality and 3D User Interfaces, VR 2022, Christchurch, New Zealand, 12–16 March 2022; pp. 270–280. [Google Scholar] [CrossRef]
- Boletsis, C.; Chasanidou, D. A Typology of Virtual Reality Locomotion Techniques. Multimodal Technol. Interact. 2022, 6, 72. [Google Scholar] [CrossRef]
- Balint, J.T.; Allbeck, J.M.; Bidarra, R. Understanding Everything NPCs Can Do: Metrics for Action Similarity in Non-Player Characters. In Proceedings of the 13th International Conference on the Foundations of Digital Games, Malmö, Sweden, 7–10 August 2018. [Google Scholar] [CrossRef] [Green Version]
- Kirschbaum, C.; Pirke, K.M.; Hellhammer, D.H. The ‘Trier social stress test’—A tool for investigating psychobiological stress responses in a laboratory setting. Neuropsychobiology 1993, 28, 76–81. [Google Scholar] [CrossRef]
- Plarre, K.; Raij, A.; Hossain, S.M.; Ali, A.A.; Nakajima, M.; Al’Absi, M.; Ertin, E.; Kamarck, T.; Kumar, S.; Scott, M.; et al. Continuous inference of psychological stress from sensory measurements collected in the natural environment. In Proceedings of the 10th ACM/IEEE International Conference on Information Processing in Sensor Networks, IPSN’11, Chicago, IL, USA, 12–14 April 2011; pp. 97–108. [Google Scholar]
- Finseth, T.; Dorneich, M.C.; Keren, N.; Franke, W.D.; Vardeman, S.B. Manipulating Stress Responses during Spaceflight Training with Virtual Stressors. Appl. Sci. 2022, 12, 2289. [Google Scholar] [CrossRef]
- Rizzo, A.; Buckwalter, J.G.; John, B.; Newman, B.; Parsons, T.; Kenny, P.; Williams, J. STRIVE: Stress resilience in virtual environments: A pre-deployment VR system for training emotional coping skills and assessing chronic and acute stress responses. Stud. Health Technol. Inform. 2012, 173, 379–385. [Google Scholar] [CrossRef]
- Laborde, S.; Mosley, E.; Thayer, J.F. Heart rate variability and cardiac vagal tone in psychophysiological research—Recommendations for experiment planning, data analysis, and data reporting. Front. Psychol. 2017, 8, 213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Umair, M.; Chalabianloo, N.; Sas, C.; Ersoy, C. HRV and Stress: A Mixed-Methods Approach for Comparison of Wearable Heart Rate Sensors for Biofeedback. IEEE Access 2021, 9, 14005–14024. [Google Scholar] [CrossRef]
- Giannakakis, G.; Grigoriadis, D.; Giannakaki, K.; Simantiraki, O.; Roniotis, A.; Tsiknakis, M. Review on Psychological Stress Detection Using Biosignals. IEEE Trans. Affect. Comput. 2022, 13, 440–460. [Google Scholar] [CrossRef]
- Nazari, G.; Bobos, P.; MacDermid, J.C.; Sinden, K.E.; Richardson, J.; Tang, A. Psychometric properties of the Zephyr bioharness device: A systematic review. BMC Sport. Sci. Med. Rehabil. 2018, 10, 4–11. [Google Scholar] [CrossRef] [Green Version]
- Shaffer, F.; Meehan, Z.M.; Zerr, C.L. A Critical Review of Ultra-Short-Term Heart Rate Variability Norms Research. Front. Neurosci. 2020, 14, 594880. [Google Scholar] [CrossRef] [PubMed]
- Pase, S. Ethical considerations in augmented reality applications. In Proceedings of the International Conference on e-Learning, e-Business, Enterprise Information Systems, and e-Government (EEE), Las Vegas, NV, USA, 16–19 July 2012. [Google Scholar]
- Slater, M.; Gonzalez-Liencres, C.; Haggard, P.; Vinkers, C.; Gregory-Clarke, R.; Jelley, S.; Watson, Z.; Breen, G.; Schwarz, R.; Steptoe, W.; et al. The ethics of realism in virtual and augmented reality. Front. Virtual Real. 2020, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Slater, M.; Sanchez-Vives, M.V. Enhancing our lives with immersive virtual reality. Front. Robot. AI 2016, 3, 74. [Google Scholar] [CrossRef] [Green Version]
- Madary, M.; Metzinger, T.K. Real virtuality: A code of ethical conduct. Recommendations for good scientific practice and the consumers of VR-technology. Front. Robot. AI 2016, 3, 3. [Google Scholar] [CrossRef] [Green Version]
- Meehan, M.; Insko, B.; Whitton, M.; Brooks, F.P., Jr. Physiological measures of presence in stressful virtual environments. ACM Trans. Graph. 2002, 21, 645–652. [Google Scholar] [CrossRef]
- Peck, T.C.; Seinfeld, S.; Aglioti, S.M.; Slater, M. Putting yourself in the skin of a black avatar reduces implicit racial bias. Conscious. Cogn. 2013, 22, 779–787. [Google Scholar] [CrossRef]
- Spiegel, J.S. The ethics of virtual reality technology: Social hazards and public policy recommendations. Sci. Eng. Ethics 2018, 24, 1537–1550. [Google Scholar] [CrossRef] [PubMed]
- Brey, P. The ethics of representation and action in virtual reality. Ethics Inf. Technol. 1999, 1, 5–14. [Google Scholar] [CrossRef]
- Brey, P. Virtual Reality and Computer Simulation. In The Handbook of Information and Computer Ethics; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2008; Chapter 15; pp. 361–384. [Google Scholar] [CrossRef] [Green Version]
- Pyun, K.R.; Rogers, J.A.; Ko, S.H. Materials and devices for immersive virtual reality. Nat. Rev. Mater. 2022, 7, 841–843. [Google Scholar] [CrossRef] [PubMed]
- Henriksson, E.A. Data protection challenges for virtual reality applications. Interact. Entertain. Law Rev. 2018, 1, 57–61. [Google Scholar] [CrossRef]
- Biega, A.J.; Potash, P.; Daumé, H.; Diaz, F.; Finck, M. Operationalizing the legal principle of data minimization for personalization. In Proceedings of the 43rd International ACM SIGIR Conference on Research and Development in Information Retrieval, Virtual, 25–30 July 2020; pp. 399–408. [Google Scholar]
- Adams, D.; Bah, A.; Barwulor, C.; Musaby, N.; Pitkin, K.; Redmiles, E.M. Ethics emerging: The story of privacy and security perceptions in virtual reality. In Proceedings of the Fourteenth Symposium on Usable Privacy and Security (SOUPS 2018), Baltimore, MD, USA, 12–18 August 2018; pp. 427–442. [Google Scholar]
- Zahabi, M.; Abdul Razak, A.M. Adaptive virtual reality-based training: A systematic literature review and framework. Virtual Real. 2020, 24, 725–752. [Google Scholar] [CrossRef]
- Dechesne, F.; Dignum, V.; Zardiashvili, L.; Bieger, J. AI & Ethics at the Police: Towards Responsible Use of Artificial Intelligence in the Dutch Police. Leiden University Center for Law and Digital Technologies (eLaw) and TU Delft Institute of Design For Values. 2019, p. 43. Available online: https://www.universiteitleiden.nl/binaries/content/assets/rechtsgeleerdheid/instituut-voor-metajuridica/artificiele-intelligentie-en-ethiek-bij-de-politie/ai-and-ethics-at-the-police-towards-responsible-use-of-artificial-intelligence-at-the-dutch-police-2019.pdf (accessed on 15 December 2022).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Area | Usefulness | Observation and Recommendation |
|---|---|---|
| Tactical training | ***** | The possibility of quickly varying location and scenario context in VR creates the groundwork for the training of tactical strategies in many different situations (e.g., tactical movement, car procedures, extreme violence situations). |
| Perception and action training | ***** | In real-life, the training design needs to be adapted to the training location’s infrastructure. VR does not have this limitation, making it extremely useful for perception and action training. VR offers training environments that a trainer can manipulate on the fly (e.g., adding extra bystanders). |
| Law and regulation training | **** | The After-Action Review (AAR) (visual debriefing of the training session) is an excellent VR-specific feature to provide feedback on information regarding law and regulation that cannot be monitored and reviewed easily in real-life training. |
| Communication training | *** | VR is helpful for communication training as it allows quick customisation of the avatar’s appearance (gender, skin, cultural aspects) and how trainees respond to and communicate with the avatar. Communication relies on the appropriate interpretation of emotions. In VR, there are limitations regarding the display of accurate and interactive facial expressions. We recommend to work with a professional actor as a role-player to optimise the display of adequate emotions. |
| Shooting and weapon handling training | ** | The AAR provides relevant information on shooting performance (e.g., hit rates, shooting lines, cross-fire) that cannot be evaluated readily in real life, making VR useful for training positioning in reference to suspects and colleagues. Currently, VR has limitations in weapon handling and aiming (e.g., precision of shot accuracy, realistic reloading). As these skills are extremely relevant for on-duty performance, they should be executed and trained in real-life with the service weapon. |
| Physical training (combat, fitness training) | * | All actions involving physical contact (e.g., handcuffing, controlling and restraining of suspect, use of weapon) are not suitable for VR training due to safety for trainees, fragility of materials, and necessary real-life haptic experience. |
| Didactical Criterion | Technical Guideline |
|---|---|
| Clear assignment | Training objective alignment |
| High quality instruction | VR instructional tutorial |
| Well-designed practice situation | Scenario design |
| Model learning | After-Action Review |
| Variation and differentiation | Scenario editor |
| Self-regulation of the learning process | Selection of tools |
| Constructive, motivating feedback | After-Action Review |
| Subjective Measurements | |||||||
|---|---|---|---|---|---|---|---|
| Stress | Anxiety | ||||||
| Stressor | n | Mean | SD | Rank | Mean | SD | Rank |
| Stranger | 22 | 41.45 | 26.24 | 1 | 28.41 | 23.94 | 1 |
| Weapon | 22 | 38.18 | 19.27 | 2 | 26.23 | 16.71 | 2 |
| Falling Rocks | 19 | 32.32 | 22.06 | 3 | 18.05 | 15.11 | 3 |
| Injured | 22 | 27.91 | 18.72 | 4 | 17.95 | 11.25 | 4 |
| Crying Child | 22 | 27.41 | 23.88 | 5 | 13.00 | 20.09 | 7 |
| Scream (Night) | 22 | 25.41 | 17.39 | 6 | 13.00 | 11.54 | 6 |
| Door Closing | 22 | 24.05 | 22.58 | 7 | 17.14 | 21.17 | 5 |
| Smoke | 22 | 23.09 | 18.52 | 8 | 11.82 | 13.04 | 10 |
| Dark Room | 22 | 19.45 | 20.69 | 9 | 12.59 | 14.55 | 8 |
| Scream Indoor | 22 | 17.68 | 14.97 | 10 | 9.82 | 9.64 | 11 |
| Dog | 22 | 17.18 | 12.73 | 11 | 11.86 | 9.71 | 9 |
| Photo (Day) | 22 | 16.59 | 15.94 | 12 | 5.68 | 5.40 | 13 |
| Photo (Night) | 22 | 14.73 | 15.56 | 13 | 5.95 | 5.64 | 12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zechner, O.; Kleygrewe, L.; Jaspaert, E.; Schrom-Feiertag, H.; Hutter, R.I.V.; Tscheligi, M. Enhancing Operational Police Training in High Stress Situations with Virtual Reality: Experiences, Tools and Guidelines. Multimodal Technol. Interact. 2023, 7, 14. https://doi.org/10.3390/mti7020014
Zechner O, Kleygrewe L, Jaspaert E, Schrom-Feiertag H, Hutter RIV, Tscheligi M. Enhancing Operational Police Training in High Stress Situations with Virtual Reality: Experiences, Tools and Guidelines. Multimodal Technologies and Interaction. 2023; 7(2):14. https://doi.org/10.3390/mti7020014
Chicago/Turabian StyleZechner, Olivia, Lisanne Kleygrewe, Emma Jaspaert, Helmut Schrom-Feiertag, R. I. Vana Hutter, and Manfred Tscheligi. 2023. "Enhancing Operational Police Training in High Stress Situations with Virtual Reality: Experiences, Tools and Guidelines" Multimodal Technologies and Interaction 7, no. 2: 14. https://doi.org/10.3390/mti7020014