
Evaluation of Unmanned-Aerial-Vehicle-Integrated Control System Efficiency on the Basis of Generalized Multiplicative Criterion
Abstract
:1. Introduction
- Safety of UAV flights on the scale of one or several countries, including in the area of civil aviation flights;
- The possibility of solving various functional tasks within a single system;
- The possibility of using a UAV of various types and manufacturers to solve these problems.
- Degree of compliance of the system with the purpose and adaptability to achieve the goals set during its creation;
- Possibility of achieving maximum results at given costs for the creation of the system.
- A “Theoretical basis” section, which substantiates the use of the efficiency criterion of the UAV control system based on multiplicative convolution and the need to move from probabilities to correspondence functions;
- A “Methodology” section, which selects specific types of correspondence functions in terms of probability and reliability, taking into account the specifics of UAV use;
- A “Results” section, which justifies the choice of the t-norm as a convolution of the correspondence functions and provides some calculation results;
- A “Discussion” section, in which it is proposed that one uses the modified t-norm (Hamacher’s t-norm), and it also substantiates the possibility of using the proposed approach to assess the effectiveness of other CTSs and the direction of further development of the methodology.
2. Theoretical Basis
- There are a number of functional (target) tasks that this system must solve, for example, cargo delivery, monitoring of important infrastructure facilities, environmental monitoring, agriculture, etc.;
- Requirements for their achievement are set, for example, in the form of a condition that the probability of solving the target problem should not be less than a given value;
- For each of these tasks, there is a specific set of UAVs designed to solve it and having known characteristics, including reliability;
- It is necessary to determine one or more UAV types that best meet the specified requirements for solving a specific target task.
- To characterize the object as a whole;
- To provide the possibility of obtaining its quantitative assessment with the required reliability;
- To have clearly defined boundaries of the area of its change.
- -
- The criteria are indifferent to the probability distribution over the flight stages, but depend only on the value of their product. In other words, if we have some set of values , then with any distribution of this set over stages, the value of the criteria will not change;
- -
- The criteria are indifferent to the relative changes in the probabilities , i.e., the relative increase or decrease in any of them is compensated by exactly the same relative decrease or increase in any of the others.
- Have a clear physical meaning;
- Be continuous and not have jumps and breaks;
- Be non-decreasing and take values at the ends of the domains and .
3. Methodology
- UAV reliability, i.e., the probability that in the process of performing the target task it will be operational;
- Probability of achieving the goal (solving its target task) with an absolutely reliable UAV, which is a multiplicative convolution of the probabilities of completing each of the flight stages.
- Selection of specific types of probability correspondence function based on the analysis of existing criteria for evaluating the effectiveness of UAV control systems.
- Choice of specific types of the matching function in terms of reliability, taking into account the fact that a UAV with reliability below the given one is not considered when comparing options.
- Choice of a specific type of convolution for the selected correspondence functions.
- Calculations.
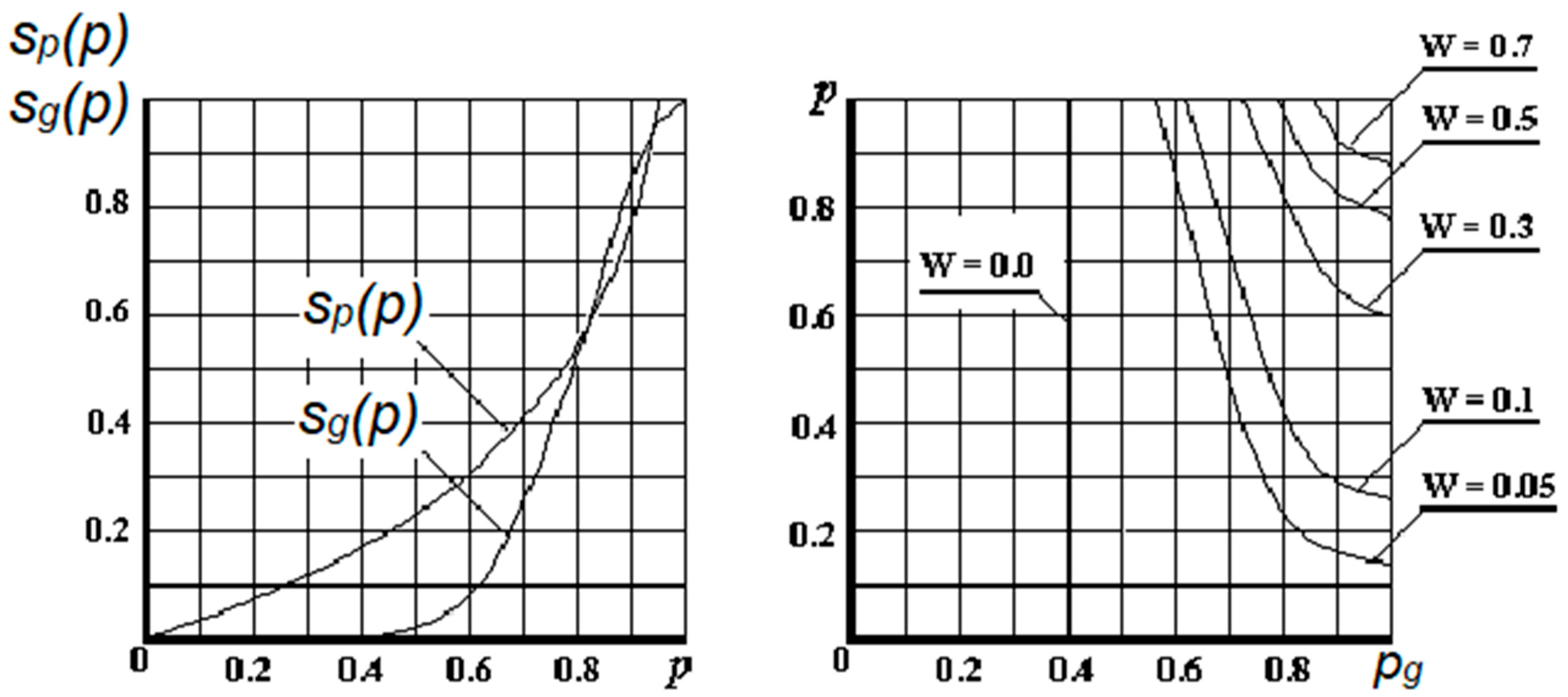
3.1. Probability Matching Function
- is the probability of reaching the target with one UAV. When comparing options according to this criterion, preference is given to the option for which this probability has the highest value.
- is the average number of UAVs needed to reach the goal. This criterion allows indirectly evaluating the possible material costs for solving the target problem.
- is the required number of UAVs to achieve the goal with a given probability . This criterion relates the probability p of reaching the goal with one UAV with the value of the required number of UAVs for a given probability of reaching the goal .
3.2. Reliability Matching Function
- The function is defined on the interval [0, 1] and its range of values also belongs to the interval [0, 1];
- If the reliability of the UAV satisfies the inequality , then the reliability matching function is ;
- The function must be non-decreasing in the variable and for the value it is natural to take ;
- In the vicinity of the points and , the change in should be smooth, i.e., have no jumps or breaks.
4. Results
- Limitations:
- Monotony:
- Commutativity:
- Associativity:
- ;
- ;
- .
5. Discussion
6. Conclusions
- Instead of the private criterion , the correspondence functions are used, which adequately reflect the significance of the advising private criterion;
- The PCC criterion is free from the shortcomings of the convolution criterion of the form of (1), but retains its structure and has a clear physical meaning; the convolution is carried out for the correspondence functions of a particular probabilistic criterion;
- It is not necessary to introduce strict restrictions on the , which, when using criterion (1), are usually formulated as and can lead to the loss of a rational solution when is in the region close to the threshold value;
- The technique is valid not only for the convolution of two correspondence functions, but also in accordance with expression (7) for an arbitrary number of them due to the associativity property of the t-norm;
- The methodology is quite universal and, with minimal changes, can be adapted to assess the effectiveness of various CTSs.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Arkin, W. Unmanned: Drones, Data and Illusion of Perfect Warfire; Little, Brown and Company: New York, NY, USA, 2015; p. 391. [Google Scholar]
- Kostin, A.S.; Bogatov, N.V. The market of unmanned aerial vehicles in Russia and the world. Current trends and development prospects. Syst. Anal. Log. 2019, 4, 65–72. [Google Scholar]
- ICAO, 3rd ed. UTM—A Common Framework with Core Boundaries for Global Harmonization. 2020. Available online: https://www.icao.int/safety/UA/Documents/UTM%20Framework%20Edition%203.pdf (accessed on 9 June 2023).
- EU-China APP Drone Workshop Highlights UTM Progress in China. 2018. Available online: https://www.unmannedairspace.info/uncategorized/eu-china-app-drone-workshop-highlights-utm-progress-china/ (accessed on 9 June 2023).
- Lappas, V.; Zoumponos, G.; Shin, H.Y. Eurodrone, a European UTM Testbed for U-Space. International Conference on Unmanned Aircraft Systems. 2020. Available online: https://www.researchgate.net/publication/347154818_EuroDRONE_A_European_UTM_Testbed_for_U-Space (accessed on 9 June 2023).
- Bar-Yam, Y. General Features of Complex Systems. Encyclopedia of Life Support Systems; EOLSS UNESCO Publishers: Oxford, UK, 2002; Available online: https://necsi.edu/general-features-of-complex-systems (accessed on 9 June 2023).
- Tsvetkov, V.Y. Complex technical systems. Educ. Resour. Technol. 2017, 3, 86–92. [Google Scholar] [CrossRef]
- Coelli, T.J.; Rao, D.S.P.; O’Donnell, C.; Battese, G.E. An Introduction to Efficiency and Productivity Analysis; Springer Science & Business Media: New York, NY, USA, 2005; p. 349. [Google Scholar]
- Ilyichev, A.V. Efficiency of Designed Equipment: Fundamentals of Analysis; Mechanical Engineering: Moscow, Russia, 1991; p. 336. [Google Scholar]
- Solomonov, Y.S. Large Systems: Warranty Supervision and Efficiency; Mechanical Engineering: Moscow, Russia, 2003; p. 368. [Google Scholar]
- Cooper, W.W.; Seiford, L.M.; Tone, K. Data Envelopment Analysis: A Comprehensive Text with Models, Applications, References and DEA-Solver Software, 2nd ed.; Springer: New York, NY, USA, 2007; p. 489. [Google Scholar]
- Zopounidis, C.; Doumpos, M. Multi-criterion decision aid in financial decision making: Methodologies and literature review. J. Multi-Crit. Dec. Analys. 2002, 11, 167–186. [Google Scholar] [CrossRef]
- Figueira, J.; Greco, S.; Ehrgott, M. Multiple Criterion Decision Analysis: State of the Art Surveys; Springer Science & Business Media: New York, NY, USA, 2005; p. 1045. [Google Scholar]
- Keeney, R.L.; Raiffa, H.; Meyer, R.F. Decisions with Multiple Objectives: Preferences and Value Tradeoffs; John Wiley & Sons: New York, NY, USA, 1976; p. 569. [Google Scholar]
- Nogin, V.D. Decision Making in a Multicriteria Environment: A Quantitative Approach; Fizmatlit: Moscow, Russia, 2002; p. 176. [Google Scholar]
- Steuer, R.E. Multiple Criterion Optimization: Theory, Computation and Application; John Wiley & Sons: New York, NY, USA, 1986; p. 546. [Google Scholar]
- Aizerman, M.A.; Aleskerov, F.T. Choice of Options. Fundamentals of the Theory; Science: Moscow, Russia, 1990; p. 240. [Google Scholar]
- Borisov, A.N.; Alekseev, A.V.; Merkurieva, G.V.; Slyadz’, N.N.; Glushkov, V.I. Processing of Fuzzy Information in Decision-Making Systems; Radio and communication: Moscow, Russia, 1989; p. 304. [Google Scholar]
- Averkin, A.N.; Batyrshin, I.Z.; Blishun, A.F.; Silov, V.B.; Tarasov, V.B. Fuzzy Sets in Control and Artificial Intelligence Models; Science: Moscow, Russia, 1986; p. 312. [Google Scholar]
- Reimann, S.; Amos, J.; Bergquist, E.; Cole, J.; Phillips, J.; Simon Shuster, S. UAV for Reliability. Aerosp. Veh. Des. 2013, 4331, 1–23. [Google Scholar]
- Petritoli, E.; Leccese, F.; Ciani, L. Reliability assessment of UAV systems. In Proceedings of the 4th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 266–270. [Google Scholar]
- Bonciocat, A.I.; Bonciocat, N.C. A Capelli type theorem for multiplicative convolutions of polynomials. Math. Nachr. 2008, 281, 1240–1253. [Google Scholar] [CrossRef]
- Belinschi, S.T. Complex Analysis Methods in Noncommutative Probability; Indiana University: Bloomington, IN, USA, 2006; 102p. [Google Scholar] [CrossRef]
- Klement, E.P.; Mesiar, R.; Pap, E. Triangular Norms; Springer Science & Business Media: New York, NY, USA, 2013; p. 387. [Google Scholar]
- Butnariu, D.; Klement, E.P. Triangular Norm-Based Measures and Games with Fuzzy Coalitions; Springer Science & Business Media: New York, NY, USA, 1993; Volume 10. [Google Scholar]
- Fodor, J.C.; Keresztfalvi, T. A characterization on the Hamacher family of t-norms. Fuzzy Sets Syst. 1994, 65, 51–58. [Google Scholar] [CrossRef]
- Oussalah, M. On the use Hamacher’s t-norms family for information aggregation. Inf. Sci. Int. J. 2003, 153, 107–154. [Google Scholar] [CrossRef]
- Sivakumar, M.; Tyj, N.M. A literature survey of unmanned aerial vehicle usage for civil applications. J. Aerosp. Technol. Manag. 2021, 13, 23. [Google Scholar] [CrossRef]
- Ahmadi, P.; Mansor, S.; Farjad, B.; Ghaderpour, E. Unmanned Aerial Vehicle (UAV)-based remote sensing for early-stage detection of Ganoderma. Remote Sens. 2022, 14, 1239. [Google Scholar] [CrossRef]
- Yun, L.; Zhang, X.; Zheng, Y.; Wang, D.; Hua, L. Enhance the accuracy of landslide detection in UAV images using an improved Mask R-CNN Model: A case study of Sanming, China. Sensors 2023, 23, 4287. [Google Scholar] [CrossRef] [PubMed]
- Loiotine, L.; Liso, I.S.; Parise, M.; Andriani, G.F. Optimization of geostructural surveys in rock mass stability analyses using remote sensing techniques. Ital. J. Eng. Geol. Environ. 2019, 3, 73–78. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coordinates of the Lines of the Reduced Criterion Level | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Const = 0.1 | Const = 0.3 | Const = 0.5 | Const = 0.7 | ||||||||
| p | pg | p · pg | p | pg | p · pg | p | pg | p · pg | p | pg | p · pg |
| 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 |
| 0.95 | 0.620 | 0.589 | 0.95 | 0.725 | 0.689 | 0.95 | 0.791 | 0.752 | 0.95 | 0.850 | 0.808 |
| 0.90 | 0.643 | 0.578 | 0.90 | 0.757 | 0.681 | 0.90 | 0.836 | 0.752 | 0.90 | 0.924 | 0.831 |
| 0.85 | 0.660 | 0.561 | 0.85 | 0.784 | 0.666 | 0.85 | 0.878 | 0.747 | 0.877 | 1.000 | 0.877 |
| 0.80 | 0.676 | 0.540 | 0.80 | 0.809 | 0.647 | 0.80 | 0.933 | 0.746 | |||
| 0.75 | 0.690 | 0.518 | 0.75 | 0.835 | 0.626 | 0.777 | 1.000 | 0.777 | |||
| 0.70 | 0.705 | 0.493 | 0.70 | 0.865 | 0.605 | ||||||
| 0.65 | 0.720 | 0.468 | 0.65 | 0.901 | 0.586 | ||||||
| 0.60 | 0.735 | 0.441 | 0.60 | 0.966 | 0.580 | ||||||
| 0.55 | 0.752 | 0.414 | 0.593 | 1.000 | 0.593 | ||||||
| 0.50 | 0.771 | 0.385 | |||||||||
| 0.45 | 0.7924 | 0.356 | |||||||||
| 0.4 | 0.8176 | 0.327 | |||||||||
| 0.35 | 0.8496 | 0.297 | |||||||||
| 0.3 | 0.8960 | 0.268 | |||||||||
| 0.259 | 1.00 | 0.259 | |||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vititin, V.; Kalyagin, M.; Kolesnichenko, V. Evaluation of Unmanned-Aerial-Vehicle-Integrated Control System Efficiency on the Basis of Generalized Multiplicative Criterion. Inventions 2023, 8, 94. https://doi.org/10.3390/inventions8040094
Vititin V, Kalyagin M, Kolesnichenko V. Evaluation of Unmanned-Aerial-Vehicle-Integrated Control System Efficiency on the Basis of Generalized Multiplicative Criterion. Inventions. 2023; 8(4):94. https://doi.org/10.3390/inventions8040094
Chicago/Turabian StyleVititin, Viktor, Maksim Kalyagin, and Valentin Kolesnichenko. 2023. "Evaluation of Unmanned-Aerial-Vehicle-Integrated Control System Efficiency on the Basis of Generalized Multiplicative Criterion" Inventions 8, no. 4: 94. https://doi.org/10.3390/inventions8040094