
Efficient Clustering of Visible Light Communications in VANET

Abstract
:1. Introduction
2. Related Works
2.1. VANET Applications
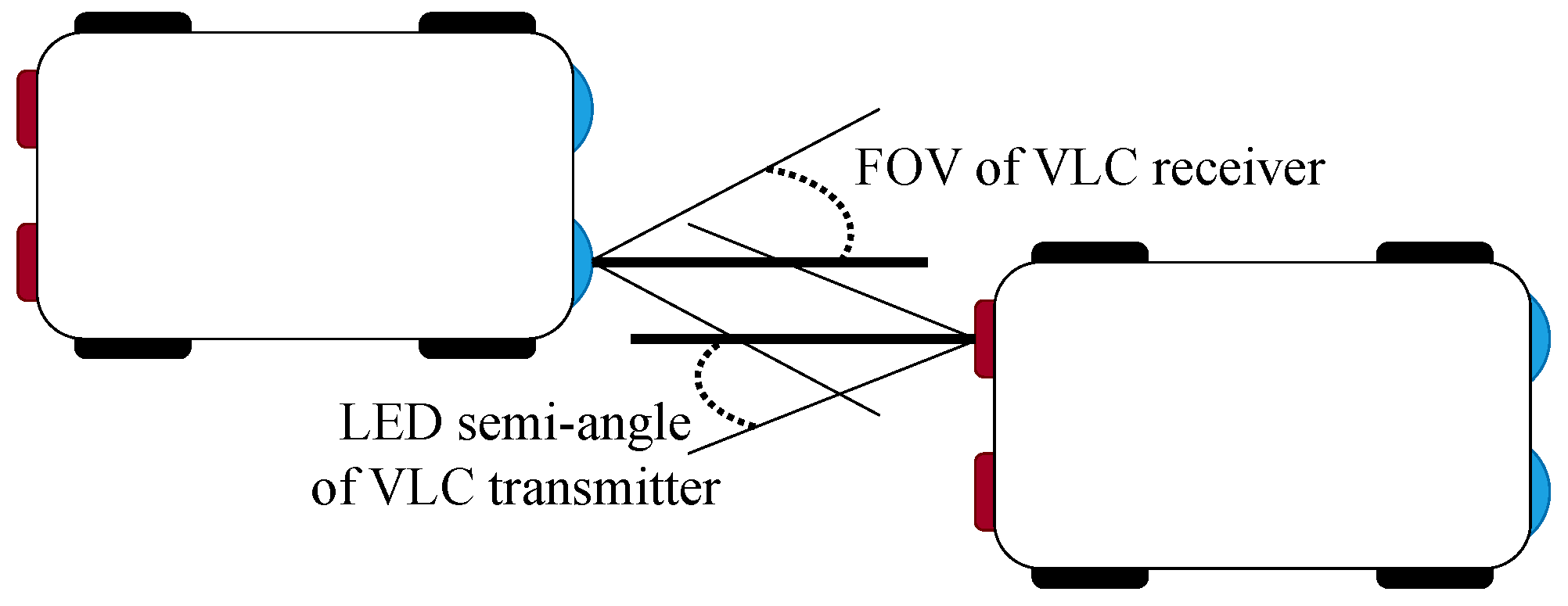
2.2. VLC
2.3. Clustering Schemes
2.3.1. Identification and Connectivity
2.3.2. Mobility and Signal Quality
2.3.3. Size and Intension
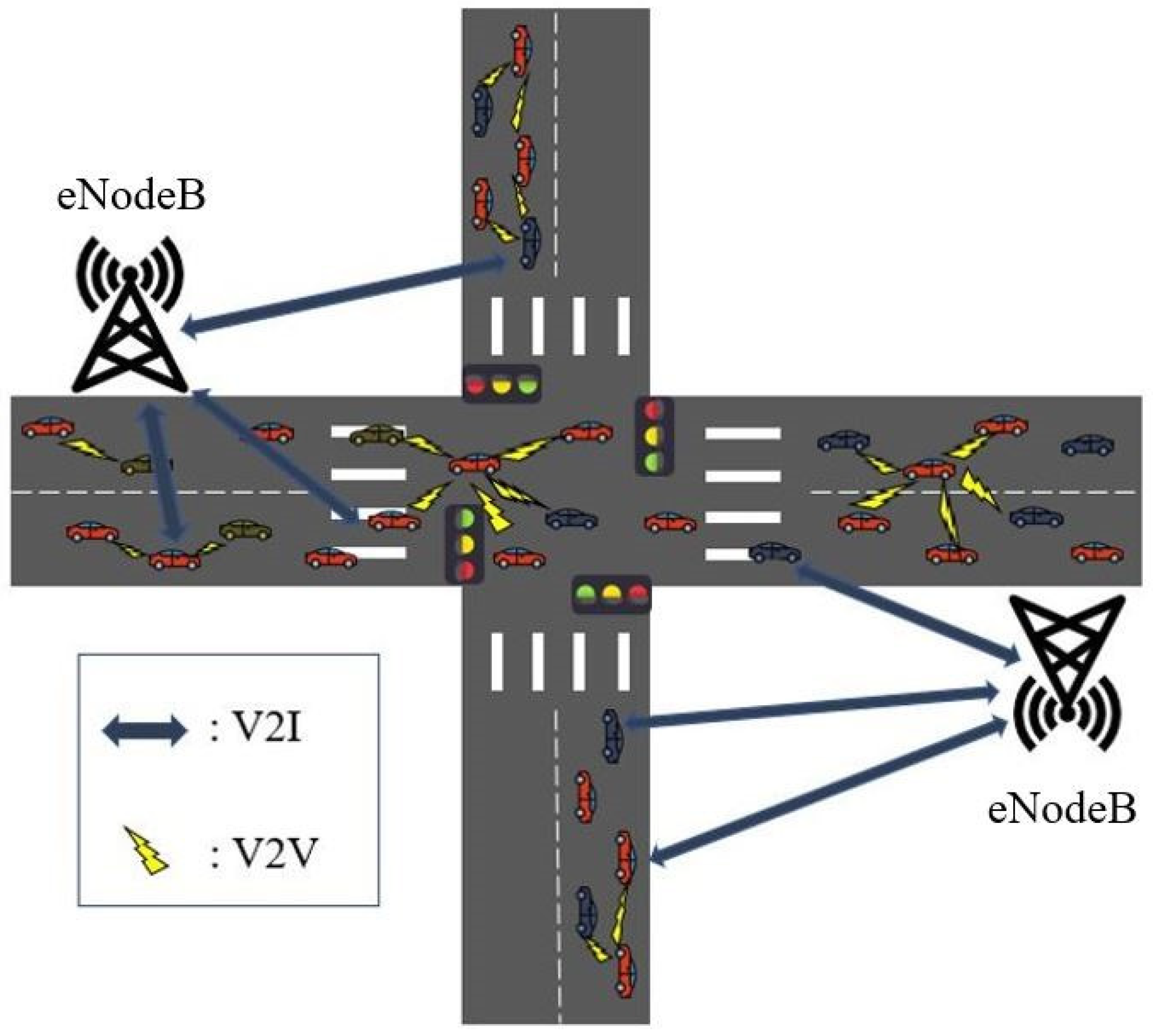
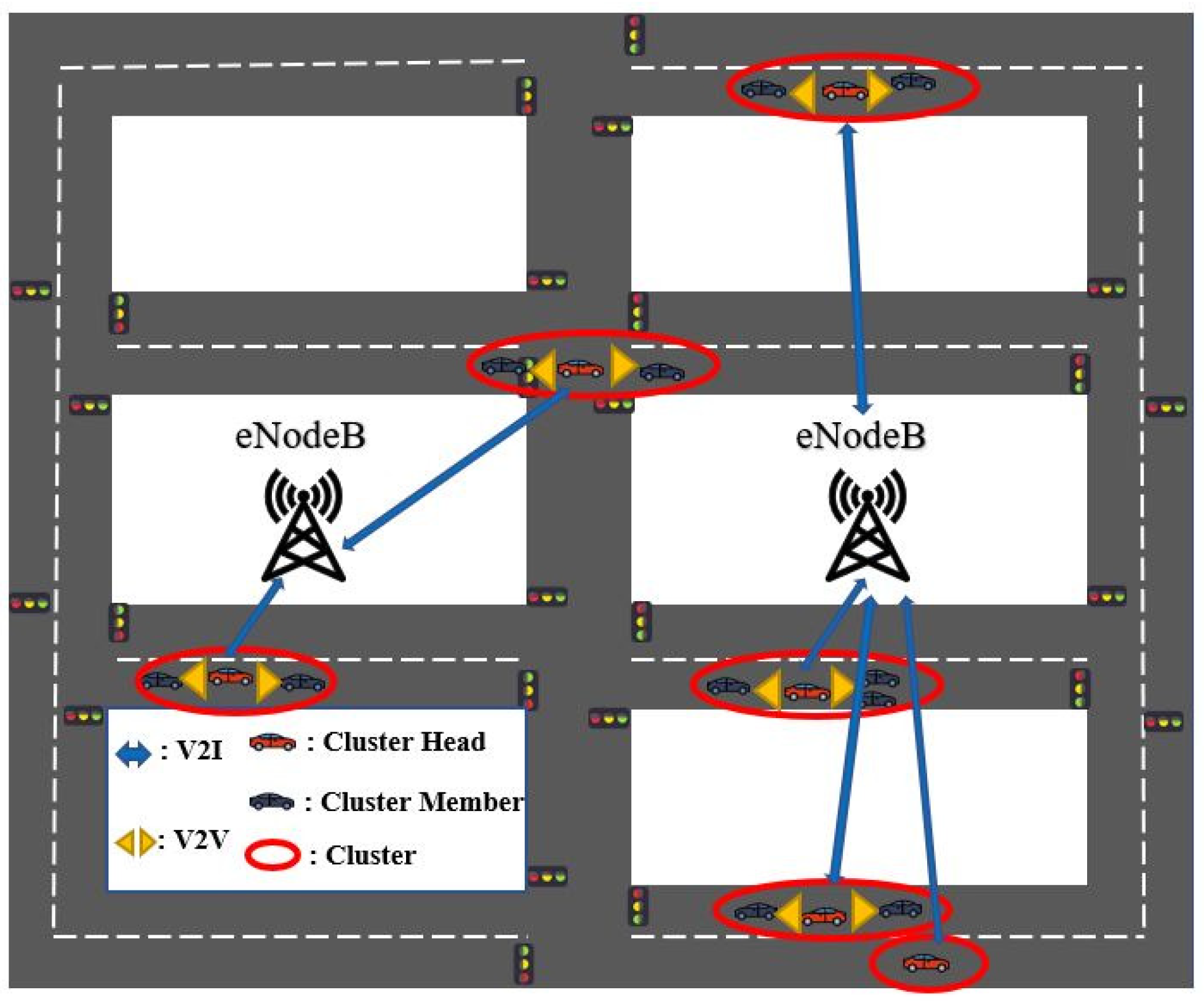
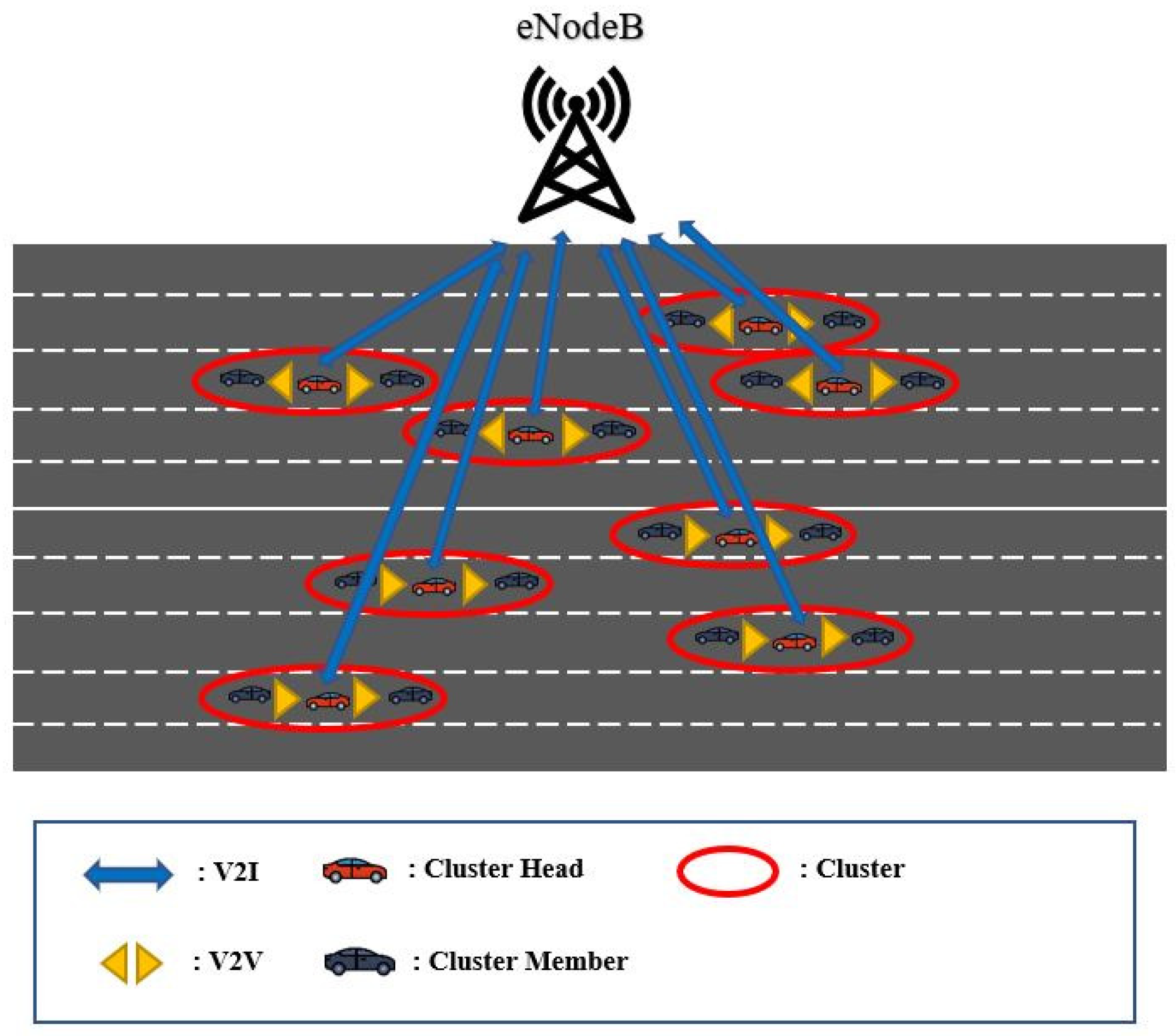
3. System Model
4. Problem Statement
5. Proposed Algorithm
5.1. Neighbor List Creation
5.2. CH Selection
| Algorithm 1 Neighbor List Creation |
|
| Algorithm 2 CH Selection |
|
5.3. Construction
| Algorithm 3 Construction |
|
6. Simulation Results
6.1. Parameter Settings and Performance Metrics
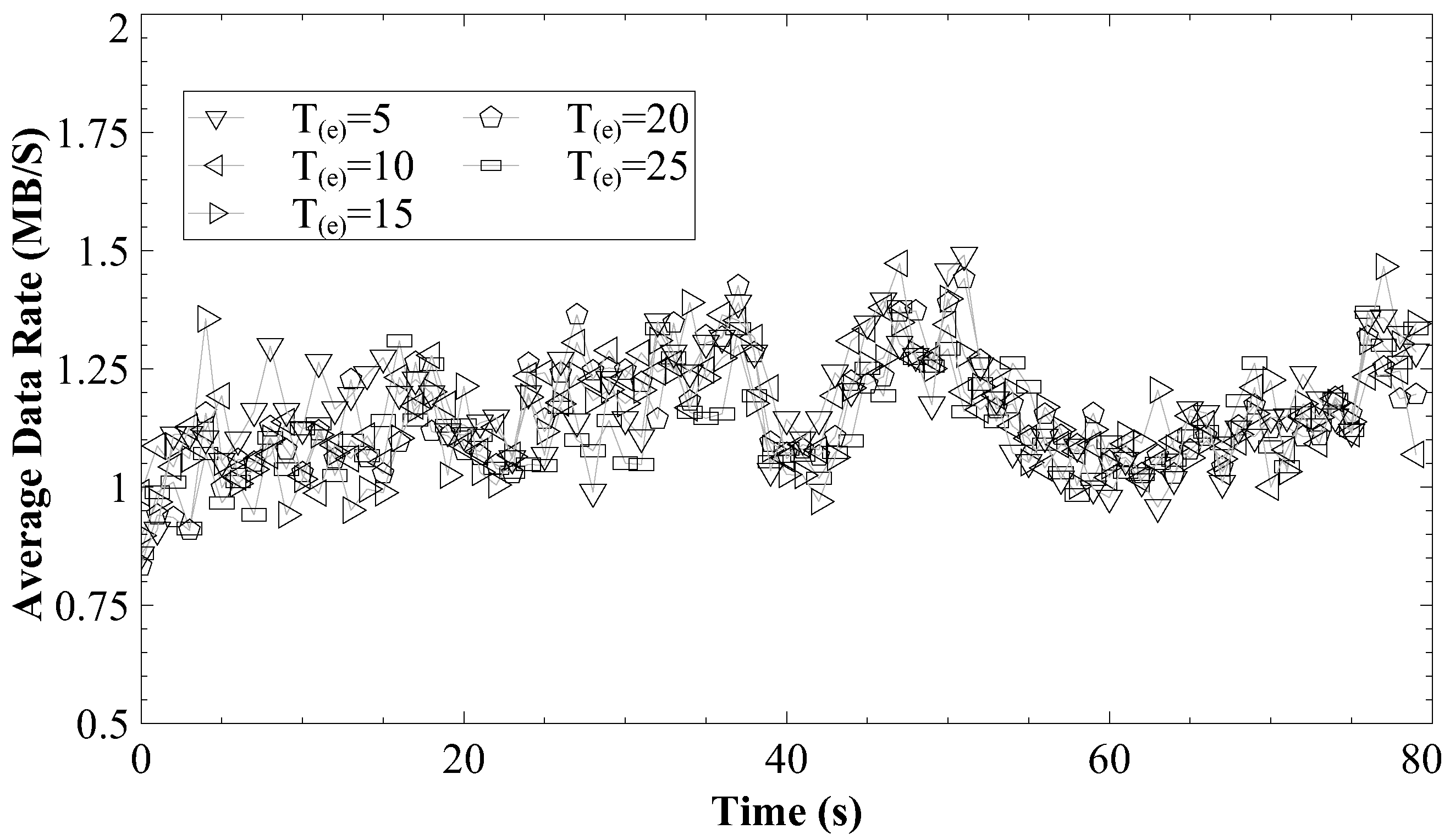
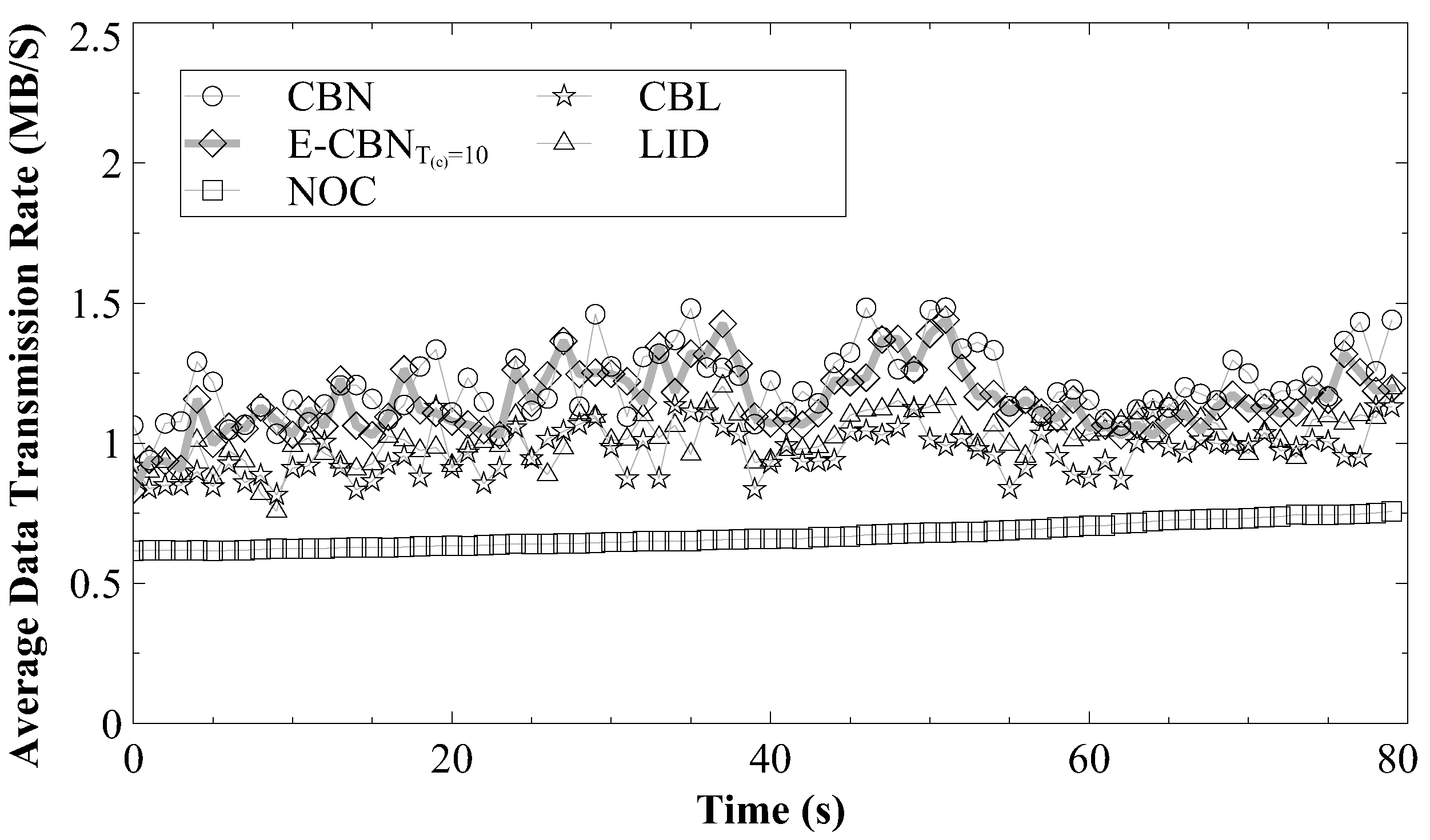
- The average data rate: the average data rate of all vehicles for uploading.
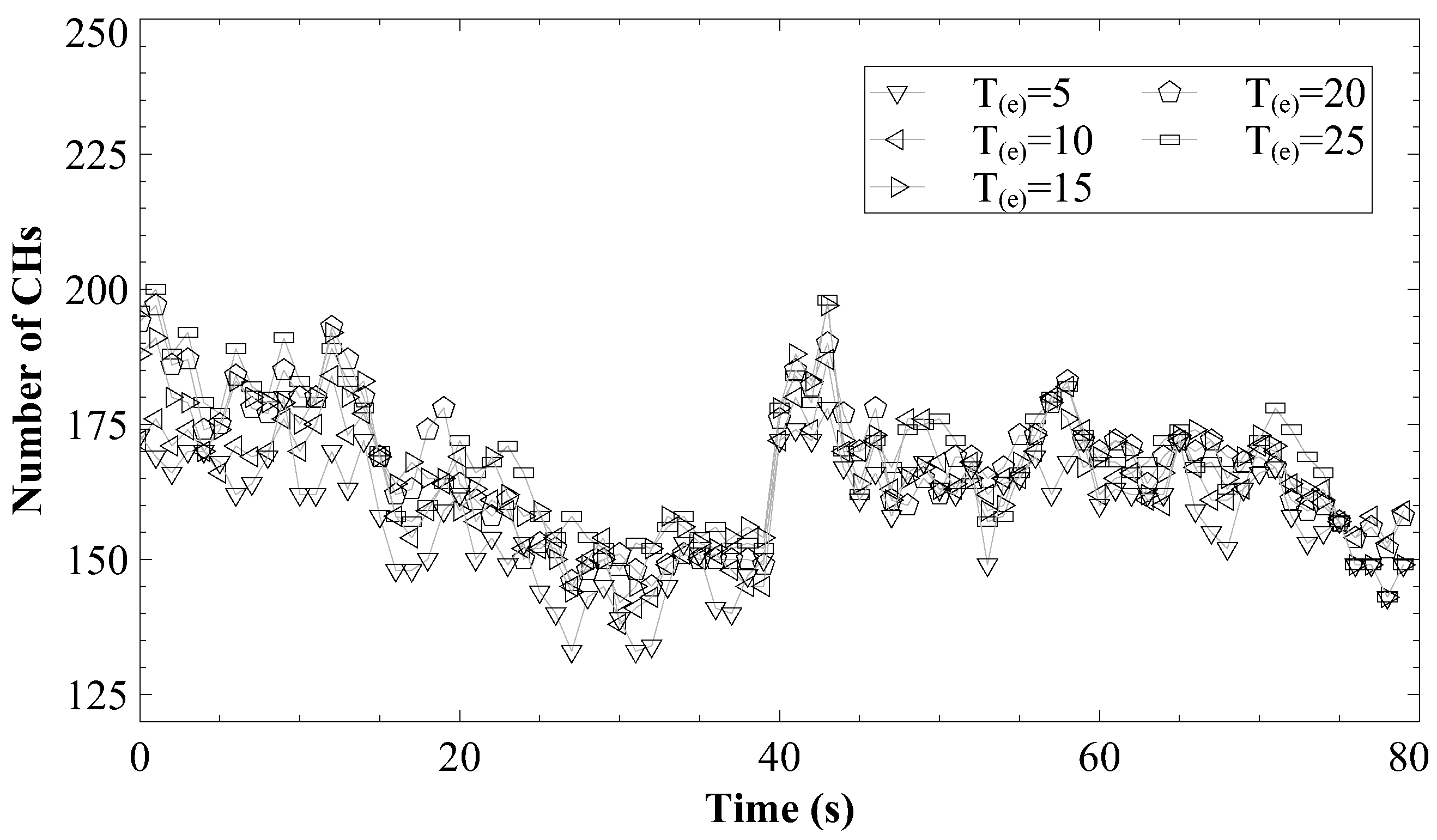
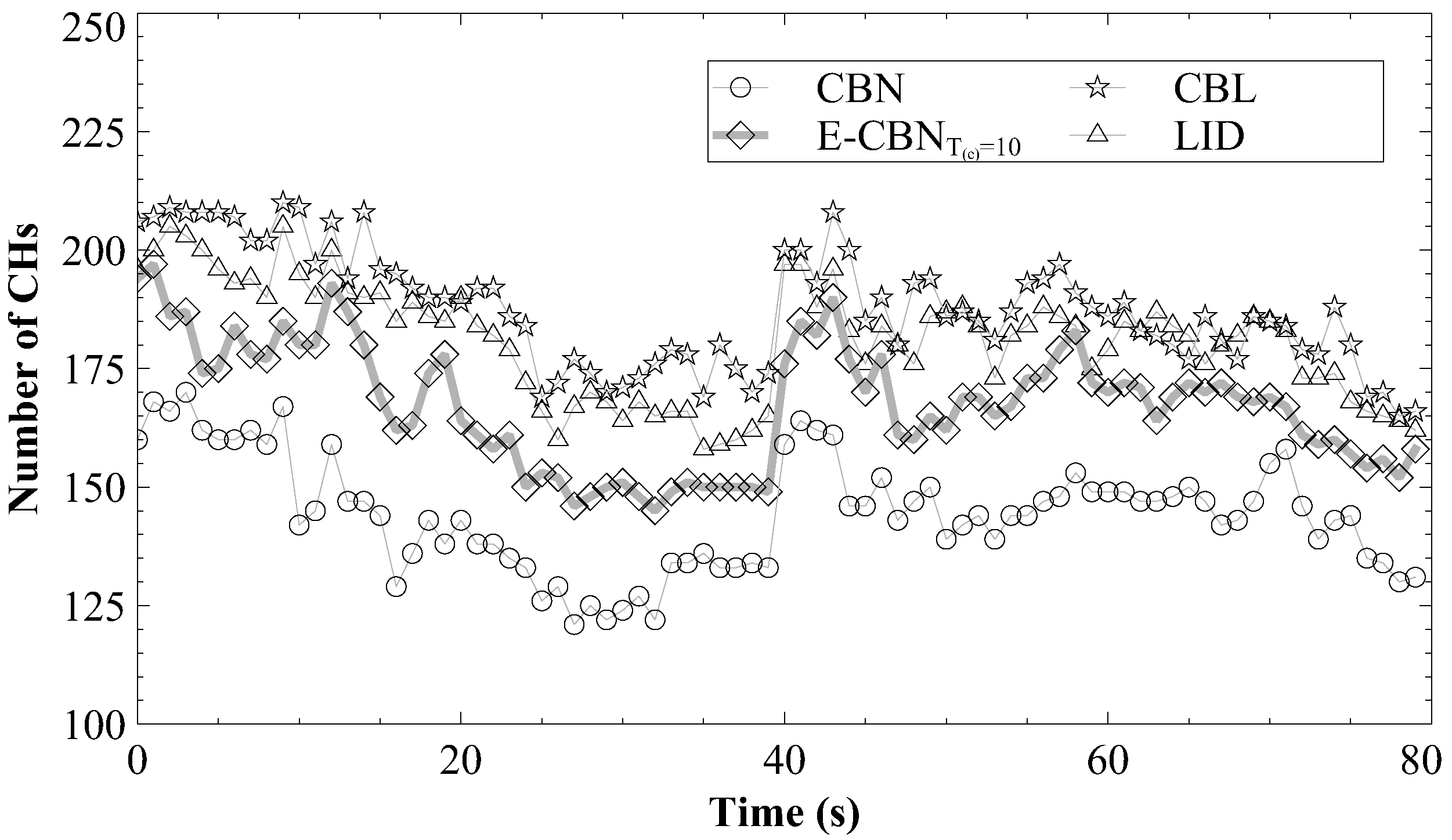
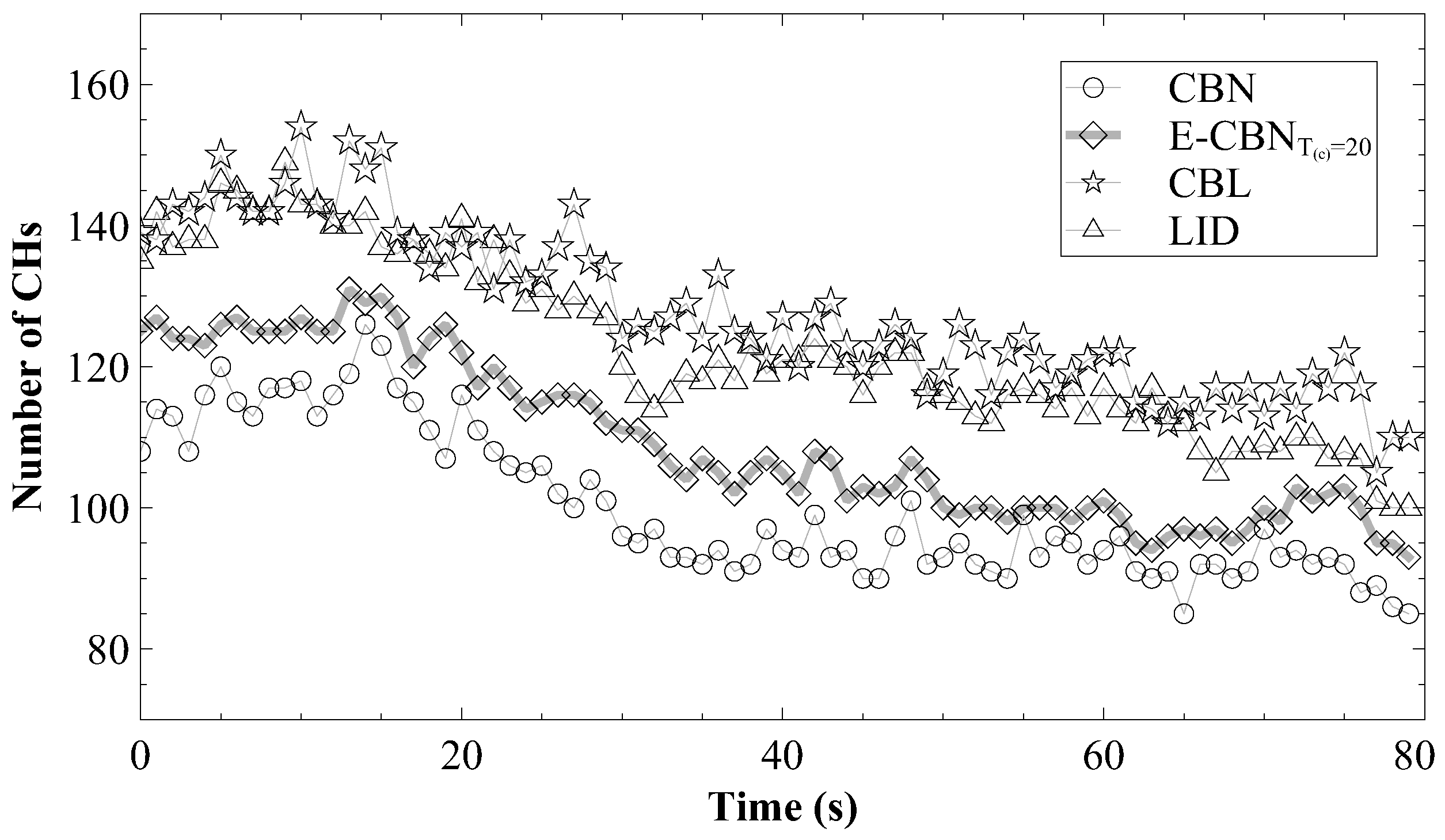
- The number of CHs: The number of CHs selected by a clustering algorithm. The lower number of CHs also represents that the possibility of numerous vehicles uploading data to the infrastructure simultaneously can be reduced.
- The number of CH changes: The number of times that vehicles change their states from CH to CM. A lower number of CH changes can reduce the communication overhead for the original CMs.
- The number of CM changes: The number of times that vehicles change their states from CM to CH. Since a CM changing its state to CH will notify its original CH and new CMs, a lower number of CM changes can reduce the communication overhead. A new CH will also contact the RSU to announce its presence.
- The CH duration: The duration of a vehicle serving as a CH. A higher CH duration implies a lower number of control messages.
6.2. Results Analysis
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Eze, E.C.; Zhang, S.; Liu, E. Vehicular Ad Hoc Networks (VANETs): Current State, Challenges, Potentials and Way Forward. In Proceedings of the 2014 20th International Conference on Automation and Computing, Cranfield, UK, 12–13 September 2014. [Google Scholar]
- Ucar, S.; Ergen, S.C.; Ozkasap, O. Multihop-Cluster-Based IEEE 802.11p and LTE Hybrid Architecture for VANET Safety Message Dissemination. IEEE Trans. Veh. Technol. 2016, 65, 2621–2636. [Google Scholar] [CrossRef] [Green Version]
- Khosroshahi, A.H.; Keshavarzi, P.; KoozehKanani, Z.D.; Sobhi, J. Acquiring Real Time Traffic Information Using VANET and Dynamic Route Guidance. In Proceedings of the 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering, Wuhan, China, 20–21 August 2011. [Google Scholar]
- Xu, C.; Quan, W.; Vasilakos, A.V.; Zhang, H.; Muntean, G.M. Information-centric cost-efficient optimization for multimedia content delivery in mobile vehicular networks. Comput. Commun. 2017, 99, 93–106. [Google Scholar] [CrossRef]
- Ansari, S.; Boutaleb, T.; Sinanovic, S.; Gamio, C.; Krikidis, I. MHAV: Multitier Heterogeneous Adaptive Vehicular Network with LTE and DSRC. ICT Express 2017, 3, 199–203. [Google Scholar] [CrossRef]
- Wu, X.; Subramanian, S.; Guha, R.; White, R.G.; Li, J.; Lu, K.W.; Bucceri, A.; Zhang, T. Vehicular Communications Using DSRC: Challenges, Enhancements, and Evolution. IEEE J. Sel. Areas Commun. 2013, 31, 399–408. [Google Scholar]
- Shen, W.H.; Tsai, H.M. Testing Vehicle-to-Vehicle Visible Light Communications in Real-World Driving Scenarios. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017. [Google Scholar]
- Schettler, M.; Memedi, A.; Dressler, F. Deeply Integrating Visible Light and Radio Communication for Ultra-High Reliable Platooning. In Proceedings of the 2019 15th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Wengen, Switzerland, 22–24 January 2019. [Google Scholar]
- Junior, W.L.; Costa, J.; Rosário, D.; Cerqueira, E.; Villas, L.A. A Comparative Analysis of DSRC and VLC for Video Dissemination in Platoon of Vehicles. In Proceedings of the 2018 IEEE 10th Latin-American Conference on Communications (LATINCOM), Jalisco, Mexico, 14–16 November 2018. [Google Scholar]
- Ucar, S.; Ergen, S.C.; Ozkasap, O. Security Vulnerabilities of IEEE 802.11p and Visible Light Communication Based Platoon. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016. [Google Scholar]
- Masini, B.M.; Bazzi, A.; Zanella, A. Vehicular Visible Light Networks with Full Duplex Communications. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Napoli, Italy, 26–28 June 2017. [Google Scholar]
- Uysal, M.; Ghassemlooy, Z.; Bekkali, A.; Kadri, A.; Menouar, H. Visible Light Communication for Vehicular Networking: Performance Study of a V2V System Using a Measured Headlamp Beam Pattern Model. IEEE Veh. Technol. Mag. 2015, 10, 45–53. [Google Scholar] [CrossRef]
- Do, T.H.; Yoo, M. A Multi-Feature LED Bit Detection Algorithm in Vehicular Optical Camera Communication. IEEE Access 2019, 7, 95797–95811. [Google Scholar] [CrossRef]
- Islam, A.; Musavian, L.; Thomos, N. Performance Analysis of Vehicular Optical Camera Communications: Roadmap to uRLLC. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Big Island, HI, USA, 9–13 December 2019. [Google Scholar]
- Takai, I.; Harada, T.; Andoh, M.; Yasutomi, K.; Kagawa, K.; Kawahito, S. Optical Vehicle-to-Vehicle Communication System Using LED Transmitter and Camera Receiver. IEEE Photonics J. 2014, 6, 7902513. [Google Scholar] [CrossRef]
- Khan, L.U. Visible light communication: Applications, architecture, standardization and research challenges. Digit. Commun. Netw. 2017, 3, 78–88. [Google Scholar] [CrossRef] [Green Version]
- Eso, E.; Burton, A.; Hassan, N.B.; Abadi, M.M.; Ghassemlooy, Z.; Zvanovec, S. Experimental Investigation of the Effects of Fog on Optical Camera-based VLC for a Vehicular Environment. In Proceedings of the 2019 15th International Conference on Telecommunications (ConTEL), Graz, Austria, 3–5 July 2019. [Google Scholar]
- Shaaban, R.; Faruque, S. Cyber security vulnerabilities for outdoor vehicular visible light communication in secure platoon network: Review, power distribution, and signal to noise ratio analysis. Phys. Commun. 2020, 40, 101094. [Google Scholar] [CrossRef]
- Kim, B.W.; Jung, S.Y. Vehicle Positioning Scheme using V2V and V2I Visible Light Communications. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016. [Google Scholar]
- Bali, R.S.; Kumar, N.; Rodrigues, J.J. Clustering in vehicular ad hoc networks: Taxonomy, challenges and solutions. Veh. Commun. 2014, 1, 134–152. [Google Scholar] [CrossRef]
- Liu, L.; Chen, C.; Qiu, T.; Zhang, M.; Li, S.; Zhou, B. A data dissemination scheme based on clustering and probabilistic broadcasting in VANETs. Veh. Commun. 2018, 13, 78–88. [Google Scholar] [CrossRef]
- Yang, J.; Wang, J.; Liu, B. An Intersection Collision Warning System using Wi-Fi Smartphones in VANET. In Proceedings of the 2011 IEEE Global Telecommunications Conference—GLOBECOM 2011, Houston, TX, USA, 5–9 December 2011. [Google Scholar]
- Al-Sultan, S.; Al-Doori, M.M.; Al-Bayatti, A.H.; Zedan, H. A comprehensive survey on vehicular Ad Hoc network. J. Netw. Comput. Appl. 2014, 37, 380–392. [Google Scholar] [CrossRef]
- Pathak, P.H.; Feng, X.; Hu, P.; Mohapatra, P. Visible Light Communication, Networking, and Sensing: A Survey, Potential and Challenges. IEEE Commun. Surv. Tutor. 2015, 17, 2047–2077. [Google Scholar] [CrossRef]
- Guan, W.; Wu, Y.; Wen, S.; Chen, H.; Yang, C.; Chen, Y.; Zhang, Z. A novel three-dimensional indoor positioning algorithm design based on visible light communication. Opt. Commun. 2017, 392, 282–293. [Google Scholar] [CrossRef]
- Naz, A.; Asif, H.M.; Umer, T.; Kim, B.S. PDOA Based Indoor Positioning Using Visible Light Communication. IEEE Access 2018, 6, 7557–7564. [Google Scholar] [CrossRef]
- Ding, W.; Yang, F.; Yang, H.; Wang, J.; Wang, X. A hybrid power line and visible light communication system for indoor hospital applications. Comput. Ind. 2015, 68, 170–178. [Google Scholar] [CrossRef]
- Chen, J.; Wang, Z. Topology Control in Hybrid VLC/RF Vehicular Ad-Hoc Network. IEEE Trans. Wirel. Commun. 2020, 19, 1965–1976. [Google Scholar] [CrossRef]
- Ji, Y.; Yue, P.; Cui, Z. VANET 2.0: Integrating Visible Light with Radio Frequency Communications for Safety Applications. In Proceedings of the ICCCS 2016: Cloud Computing and Security, Nanjing, China, 29–31 July 2016; pp. 105–116. [Google Scholar]
- Abualhoul, M.; Al-Bado, M.; Shagdar, O.; Nashashibi, F. A Proposal for VLC-Assisting IEEE802.11p Communication for Vehicular Environment Using a Prediction-based Handover. In Proceedings of the ITSC 2018—21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Cooper, C.; Franklin, D.; Ros, M.; Safaei, F.; Abolhasan, M. A Comparative Survey of VANET Clustering Techniques. IEEE Commun. Surv. Tutor. 2017, 19, 657–681. [Google Scholar] [CrossRef]
- Gerla, M.; Tsai, J.T.C. Multicluster, mobile, multimedia radio network. Wirel. Netw. 1995, 1, 255–265. [Google Scholar] [CrossRef]
- Ren, M.; Zhang, J.; Khoukhi, L.; Labiod, H.; Vèque, V. A Unified Framework of Clustering Approach in Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1401–1414. [Google Scholar] [CrossRef]
- Rossi, G.V.; Fan, Z.; Chin, W.H.; Leung, K.K. Stable Clustering for Ad-Hoc Vehicle Networking. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017. [Google Scholar]
- Ren, M.; Khoukhi, L.; Labiod, H.; Zhang, J.; Veque, V. A new mobility-based clustering algorithm for vehicular ad hoc networks (VANETs). In Proceedings of the NOMS 2016—2016 IEEE/IFIP Network Operations and Management Symposium, Istanbul, Turkey, 25–29 April 2016. [Google Scholar]
- Ferng, H.W.; Abdullah, M. Mobility-Based Clustering With Link Quality Estimation for Urban Vanets. In Proceedings of the 2019 International Conference on Machine Learning and Cybernetics (ICMLC), Kobe, Japan, 7–10 July 2019. [Google Scholar]
- Ahmad, I.; Noor, R.M.; Ahmedy, I.; Shah, S.A.A.; Yaqoob, I.; Ahmed, E.; Imran, M. VANET–LTE based heterogeneous vehicular clustering for driving assistance and route planning applications. Comput. Netw. 2018, 145, 128–140. [Google Scholar] [CrossRef]
- Maglaras, L.A.; Katsaros, D. Enhanced Spring Clustering in VANETs with Obstruction Considerations. In Proceedings of the 2013 IEEE 77th Vehicular Technology Conference (VTC Spring), Dresden, Germany, 2–5 June 2013. [Google Scholar]
- Tal, I.; Muntean, G.M. User-Oriented Fuzzy Logic-Based Clustering Scheme for Vehicular Ad-Hoc Networks. In Proceedings of the 2013 IEEE 77th Vehicular Technology Conference (VTC Spring), Dresden, Germany, 2–5 June 2013. [Google Scholar]
- Aloise, D.; Deshpande, A.; Hansen, P.; Popat, P. NP-hardness of Euclidean sum-of-squares clustering. Mach. Learn. 2009, 75, 245–248. [Google Scholar] [CrossRef] [Green Version]
- Krajzewicz, D.; Hertkorn, G.; Rössel, C.; Wagner, P. SUMO (Simulation of Urban MObility)—An open-source traffic simulation. In Proceedings of the 4th Middle East Symposium on Simulation and Modelling (MESM20002), Sharjah, United Arab Emirates, 28–30 September 2002; pp. 183–187. [Google Scholar]
- Bian, C.; Zhao, T.; Li, X.; Yan, W. Boosting named data networking for data dissemination in urban VANET scenarios. Veh. Commun. 2015, 2, 195–207. [Google Scholar] [CrossRef]
- Kim, Y.H.; Cahyadi, W.A.; Chung, Y.H. Experimental Demonstration of VLC-Based Vehicle-to-Vehicle Communications Under Fog Conditions. IEEE Photonics J. 2015, 7, 7905309. [Google Scholar] [CrossRef]
- Liu, G.; Hou, X.; Huang, Y.; Shao, H.; Zheng, Y.; Wang, F.; Wang, Q. Coverage Enhancement and Fundamental Performance of 5G: Analysis and Field Trial. IEEE Commun. Mag. 2019, 57, 126–131. [Google Scholar] [CrossRef]
- Huang, Y.Y.; Wang, P.C. Computation Offloading and User-Clustering Game in Multi-Channel Cellular Networks for Mobile Edge Computing. Sensors 2023, 23, 1155. [Google Scholar] [CrossRef]
- Qin, A.; Cai, C.; Wang, Q.; Ni, Y.; Zhu, H. Game Theoretical Multi-user Computation Offloading for Mobile-Edge Cloud Computing. In Proceedings of the 2019 IEEE Conference on Multimedia Information Processing and Retrieval (MIPR), San Jose, CA, USA, 28–30 March 2019; pp. 328–332. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| N | The set of vehicles |
| The hop count between | |
| The duration of i in CH or CM status, | |
| The binary variable indicates whether j is sensed by | |
| The binary variables indicating link between | |
| The binary variable indicates whether i is CH, | |
| The binary variable indicates whether i is CM, |
| Parameters | Urban Area | Highway |
|---|---|---|
| Map Size | 600 m×700 m | 5000 m × 100 m |
| Maximum Speed | 40 km/h [42] | 80 km/h [43] |
| Lanes (each direction) | 3 | 5 |
| Total Number of Vehicles | 500 | 500 |
| Semi-angle | [18] | [18] |
| Transmission Range of Vehicle | 100 m [12] | 100 m [12] |
| Simulation Time | 80 s | 80 s |
| 20 s | 10 s | |
| Transmission Range of RSUs | 680 m [44] | 680 m [44] |
| Total Number of RSUs | 2 | 7 |
| Number of Channels | 5 [45] | 5 [45] |
| Channel Bandwidth | 100 MHz [44] | 100 MHz [44] |
| Transmission Power of Vehicle | 200 mWatts [46] | 200 mWatts [46] |
| Channel Noise | 10 mWatts [45] | 10 mWatts [45] |
| Path Loss Factor | 4 [45] | 4 [45] |
| Metrics | |||||
|---|---|---|---|---|---|
| Average CH duration (s) | |||||
| The number of CH changes | 2729 | 2219 | 2142 | 2082 | 2108 |
| The number of CM changes | 2878 | 2378 | 2291 | 2240 | 2257 |
| Metrics | CBN | E-CBN | CBL | LID |
|---|---|---|---|---|
| Average CH duration (s) | ||||
| The number of CH changes | 3440 | 2082 | 5375 | 1811 |
| The number of CM changes | 3571 | 2240 | 5541 | 1973 |
| Metrics | CBN | E-CBN | CBL | LID |
|---|---|---|---|---|
| Average CH duration (s) | ||||
| The number of CH changes | 2352 | 1286 | 4498 | 1170 |
| The number of CM changes | 2437 | 1379 | 4608 | 1270 |
| Semi-Angle | CBN | E-CBN | CBL | LID |
|---|---|---|---|---|
| Semi-Angle | CBN | E-CBN | CBL | LID |
|---|---|---|---|---|
| 11,547 | 13,385 | 15,017 | 14,486 | |
| 8480 | 9776 | 11,492 | 11,162 | |
| 7932 | 9171 | 10,942 | 10,624 |
| Semi-Angle | CBN | E-CBN | CBL | LID |
|---|---|---|---|---|
| 3 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.-Y.; Wang, P.-C. Efficient Clustering of Visible Light Communications in VANET. Inventions 2023, 8, 83. https://doi.org/10.3390/inventions8040083
Chen Y-Y, Wang P-C. Efficient Clustering of Visible Light Communications in VANET. Inventions. 2023; 8(4):83. https://doi.org/10.3390/inventions8040083
Chicago/Turabian StyleChen, Yu-Yen, and Pi-Chung Wang. 2023. "Efficient Clustering of Visible Light Communications in VANET" Inventions 8, no. 4: 83. https://doi.org/10.3390/inventions8040083