1. Introduction
With the development of robotic technologies, mobile robots are implemented in commerce and industry. Automated Guided Vehicles (AGVs) enhance transportation efficiency with less cost [
1,
2]. They are utilized in the industry as a part of industrial intelligence, intelligent logistics, and intelligent factories [
2,
3]. AGVs comprise the industry’s unit load vehicles, towing vehicles, forklifts, and pallet trucks [
4]. AGVs are applied to diminish labour costs and improve safety for the high demands in a production environment [
5,
6]. Servo handling systems, warehousing systems, logistics, and storage industries employ AGVs in various areas [
6,
7], including transportation, transhipment, distribution, and material handing in manufacturing [
8].
AGVs can transfer products at high speeds in a chaotic situation. They are implemented in production lines with flexible development in modern manufacturing, incorporating automated intelligent control systems [
4,
6,
9]. With sensors’ help, detecting obstacles and automatically eliminating problems ensure the intelligence and adaptability of AGVs [
6]. AGV navigation in the industrial environment usually implements the fixed line or the coupled approach, which adapts the single-robot navigation methods. It lacks the flexibility and the possibility of real-time implementation. It has highly demanded that AGV have a quick and flexible route setting and adapt to the dynamic environment. The motivation of this study is to provide fast computed path planning with flexibility and scalability for multi-AGV systems, addressing most situations.
This paper introduces a new algorithm for this purpose. Its main contribution is as follows:
A novel path-planning approach for multi-AGV systems based on the improved Vicsek model with a leader–follower structure. The bio-inspired approaches are widely used in multi-robot path planning. The Vicsek model is adapted for this case because the AGVs aim to move as a swarm operation and provide quick computation for the entire system.
Offering the fast path setting for multiple AGVs in one calculation step, which differs from the other path-planning algorithms that repeat the algorithms for every robot.
For real-time implementation, it provides faster computation and adaption to the environment.
Instead of navigating all the AGVs directly, a set of virtual leaders is introduced in the AGV swarms to navigate all the AGVs, combining search and intelligent algorithm advantages. Biological patterns and the leader’s principle are the main concepts in this model, and it integrates the coupled and decoupled approach. The hybrid centralized decentralized is proposed for determining the leader’spath while providing flexibility for AGVs. Each AGV follower collects data from its neighbours and is led by the virtual leaders without the restriction of the current group. One of the significant advantages of the proposed multi-AGV path-planning system is that it requires less computational load for real-time implementation.
The Leader-Vicsek model was published in [
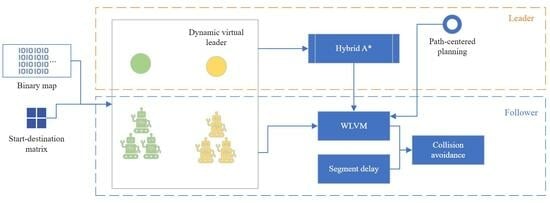
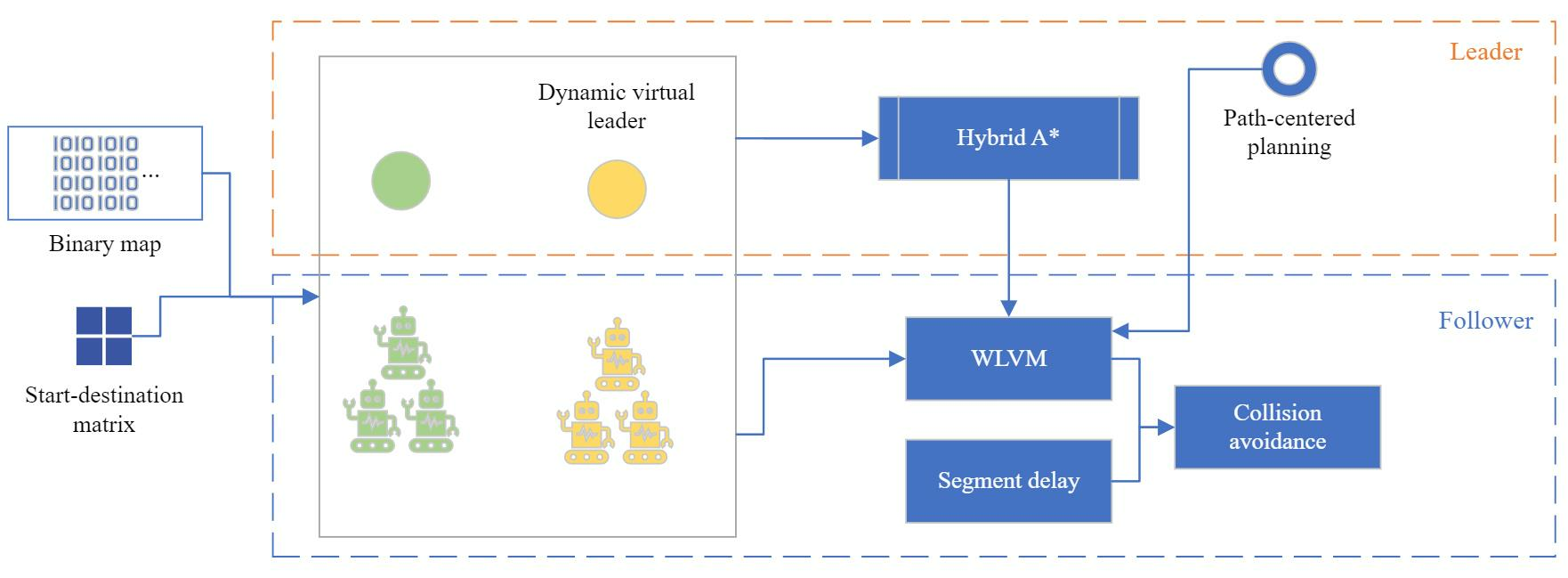
10], and this paper is an extension. The published paper introduces the concept of the novel Weight-Leader-Vicsek model, but it uses simple, straightforward path planning for the leader and traditional Vicsek update equations for followers. Nevertheless, this paper uses a dual layer to improve the model as an enhanced Weight-Leader-Vicsek model (WLVM). It generates the dynamic virtual leader by the hybrid A* algorithm and uses a start–destination matrix to determine the swarms’ integration, and collision avoidance is achieved by priority. Also, the followers’ position and angle updates are improved by adding the weight for the average angle and considering the current leader’s angle. The simulations are conducted in a new scenario, and WLVM is compared with other algorithms.
This paper offers a multi-AGV path-planning approach for optimizing automatic transportation in commercial or industrial warehouses. The paper is organized as follows.
Section 2 reviews path-planning algorithms and the multi-AGV navigation approaches. Weight-Leader-Vicsek model is proposed in
Section 3 for multi-AGV path planning and navigation. Experiment results are demonstrated in
Section 4 to validate the approach, and the conclusion is in
Section 5.
2. Related Work
The Automatic Guided Vehicle (AGV) plays a crucial role in the intelligent transportation system. AGVs are the primary automated equipment that carry materials and process unmanned distribution and sorting in an unmanned storage environment [
11]. Path planning has been the most crucial consideration of mobile robot navigation, which plans the path from the start to the target for mobile robots [
3].
Obstacle avoidance functions must be developed to operate AGVs when considering dynamical limitations and dynamical safety [
1,
12]. Meta-heuristic-based methods [
13], graph search-based methods [
2,
14], mathematical optimization-based methods [
1], and potential field and navigation-based methods [
15] are the four main categories for navigation algorithms.
Additionally, adapting the classic graph search algorithm is implemented widely for AGV path planning, such as the A* and Dijkstra [
16]. The limitation of the improved A* algorithm is that the path cannot be guaranteed optimal and is conducted under simulation. Different algorithms can be combined; for example, the Dijkstra algorithm is for initial static path planning, and the virtual potential function algorithm is for dynamic path planning [
17]. The drawback of this study is that static or dynamic obstacles have yet to be tested in real-life testing. Sampling-based methods are also significant for single AGV path planning, such as the Voronoi graph and rapidly exploring random trees (RRT) methods [
18]. Future research on the improved RRT must combine obstacle avoidance and data-driven path planning.
The mathematical optimization-based approach also consists of open-loop and closed-loop strategies [
1]. A nonlinear model predictive control (MPC) algorithm has been proposed for large-size AGVs with onboard LIDAR sensors and a 14 DoF vehicle dynamics model [
1]. Artificial potential field (APF) methods [
19] and the probabilistic road map [
20] are also proposed for motion planning. The limitations of these studies include vehicle control, moving obstacles, and real-time implementation.
The AGV path-planning algorithms introduced above are mainly focused on individual AGVs. For the venues with multiple AGVs operated simultaneously, the dynamic environment due to other AGVs and people needs to be handled safely and efficiently.
Multi-AGV systems have become more popular because of their powerful task-solving complexity, continuous operation, reduced maintenance and operational costs, and broad convergence, flexibility, and versatility [
21,
22]. Multi-AGV optimization scheduling can improve the logistics transportation system structure and system operation efficiency and reduce transportation costs [
23,
24].
Finding the best path quickly and avoiding collision is worth studying in an AGV operation [
25]. AGVs obtain the paths from the multi-AGV scheduling system, and they sense the surroundings independently and communicate with others by sending poses [
26]. AGVs are usually guided by optical, electromagnetic, and laser navigation technologies or combinations of them, following the arranged path and avoiding collisions [
27]. The research on multi-AGV routing can be classified as semi-dynamic, fully-dynamic, and static routing [
28].
Vehicle dispatching, positioning, vehicle routing, scheduling, and collision and deadlock avoidance are considered for designing vehicle transportation systems [
29]. Current multi-AGV systems commonly implement the centralized control architecture to perform tasks, such as motion coordination, mission allocation, and path planning [
30]. The centralized control system is referred to as the warehouse management system (WMS) [
31]. However, each AGV plans its path for the distributed approaches and resolves deadlocks or collisions by communicating with its neighbours. Vehicle autonomy and distributed computation are characteristics of decentralized methods [
21].
Moreover, a decentralized approach for determining the shortest paths and motion coordination based on nonholonomic vehicle constraints is presented in [
21]. It needs to consider the other vehicles’ motion plans or locations in future work. A regional control model is introduced for distributed control for the multi-AGV system in [
32] to minimize the complexity of scheduling issues. The limitations are related to real manufacturing companies and distributed control mechanisms.
An ant-agent optimized by a repulsive potential field is developed to combine centralized and decentralized control and avoid path conflicts with stability and efficiency [
28]. The approach’s limitations are that it cannot determine whether the method is optimal or considers the working condition of AGV. A multi-AGV path-planning method improves ant colony algorithms according to prioritized planning, considering battery management in [
33] as a decentralized algorithm, whereas it only uses simulation to verify the results.
The metaheuristic algorithms are widely used for optimization problems for AGV systems, such as task allocation [
24] and path planning [
34]. Multi-agent path-planning algorithms can be divided into rule-based, search-based, and learning-based [
35]. Rule-based algorithms use mature solutions for path planning by transferring the problem to other problems; search-based algorithms implement heuristic search algorithms and are classified as decoupled search, and coupled search algorithms [
36], and learning-based algorithms obtain optimal solutions from suboptimal solutions [
35].
A multi-AGV probabilistic time-constrained path-planning algorithm is also based on the A* heuristic algorithm with dynamic stochastic network theory in [
22]. An improved A* path-planning algorithm is introduced for a grid-shaped network, ensuring the locating and execution of motion commands [
25]. The unidirectional directed graph method combined with the A* algorithm for AGV path planning in a multi-AGV scheduling system is presented [
37]. The limitations of these improved A* algorithms consist of the iterative update whichis not adaptive of path arc time consumption [
22], lacking experiments [
22,
25,
37], dynamic scheduling algorithms, or path optimality [
37].
Heuristic information and elastic time window are considered in the improved ant colony algorithm [
38], and the conflict resolution strategies are based on the priority of AGV task scheduling. The drawbacks of the algorithm include transportation equipment, actual operation, and path conflict. A hybrid genetic algorithm-particle swarm optimization is proposed for multi-AGV path planning with a fuzzy logic controller in [
36], combining scheduling and path planning. The shortcoming focuses on dynamic real-time scheduling in a large-scale system. A genetic algorithm is improved to consider the highest charging utilization rate and the shortest path to plan the optimal path for multi-AGV, whereas it lacks real operation [
11].
Deadlock avoidance is the primary consideration during multi-AGV path planning. Nodes describe the physical locations, whereas the grids are independent spaces in the environment [
23]. The node-based coordination strategies strictly avoid the AGVs occupying a common node. The authors of [
23] propose deadlock strategies by combining nodes and grids, and future work will be integrated with a distributed framework for scalability. A structural online control policy is proposed for multi-AGV deadlock resolution based on analyzing the system as discrete events [
39]. The topological graph and roadmap work for the AGVs’ subsequent coordination by local negotiation and shared resources as a holistic approach in industrial warehouses [
40]. The shortcomings focus on the task allocation mechanism and real factors of the graph weights.
However, the multi-agent algorithms plan the path independently and lack consideration of moving obstacles and real-time implementation. Most evolution-based and swarm-based algorithms are bio-inspired, and the biological pattern is considered when developing the new algorithm. This paper proposes a Weight-Leader-Vicsek model algorithm, which incorporates the advantages of decentralized and centralized approaches. Each AGV collects data from relevant AGVs, determines its path, and achieves collision avoidance. At the same time, a central decision-maker assigns the multi-AGV groups and virtual leaders for the defined groups. AGV control variables can be gained with faster computational speed and less complexity. This model provides path-planning functionality simultaneously for grouped AGVs and treats each group as different swarms.
5. Conclusions
The WLVM is proposed to improve the Vicsek model, and it develops dynamic virtual leaders and a start–destination matrix, considering the leaders’ direction with weight. Also, it is capable of providing scalability and flexibility for multi-AGV systems with fast and flexible path settings. The path-planning problem is formulated as a 2D space with the start and target locations, and it avoids static and dynamic obstacles. From the literature, most path-planning approaches plan the path independently. However, the proposed WLVM algorithm can offer the path settings in one calculation step for swarms.
The WLVM implements the virtual leader to navigate the follower-AGV in each multi-AGV group, and the leader’s positions and angels are generated by the hybrid A* algorithm. The proposed approach updates the statutes of AGVs with iterations, and the angles of AGVs consider the neighbour and the leader. Model and system initialization and multi-AGV group formation are completed through a centralized method, whereas it achieves the dynamic decentralized approach for each AGV.
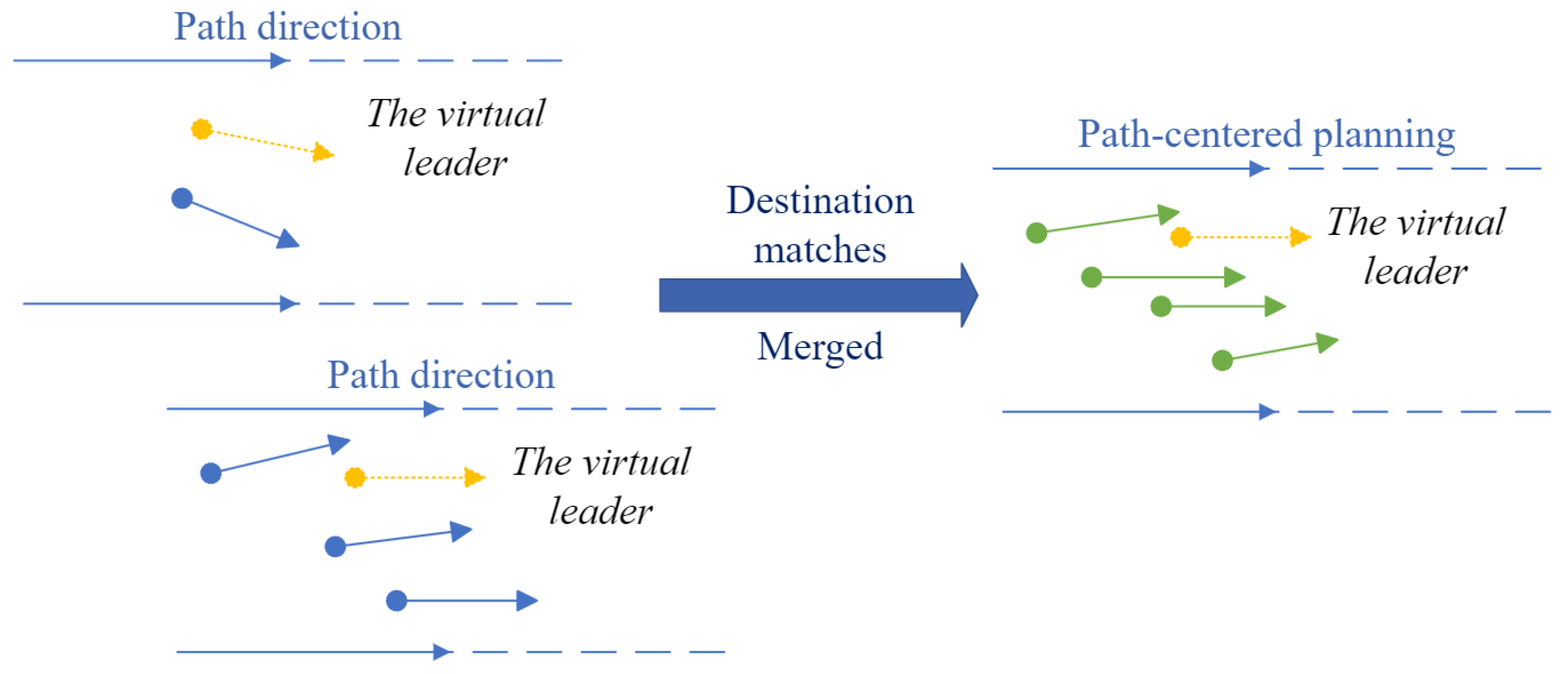
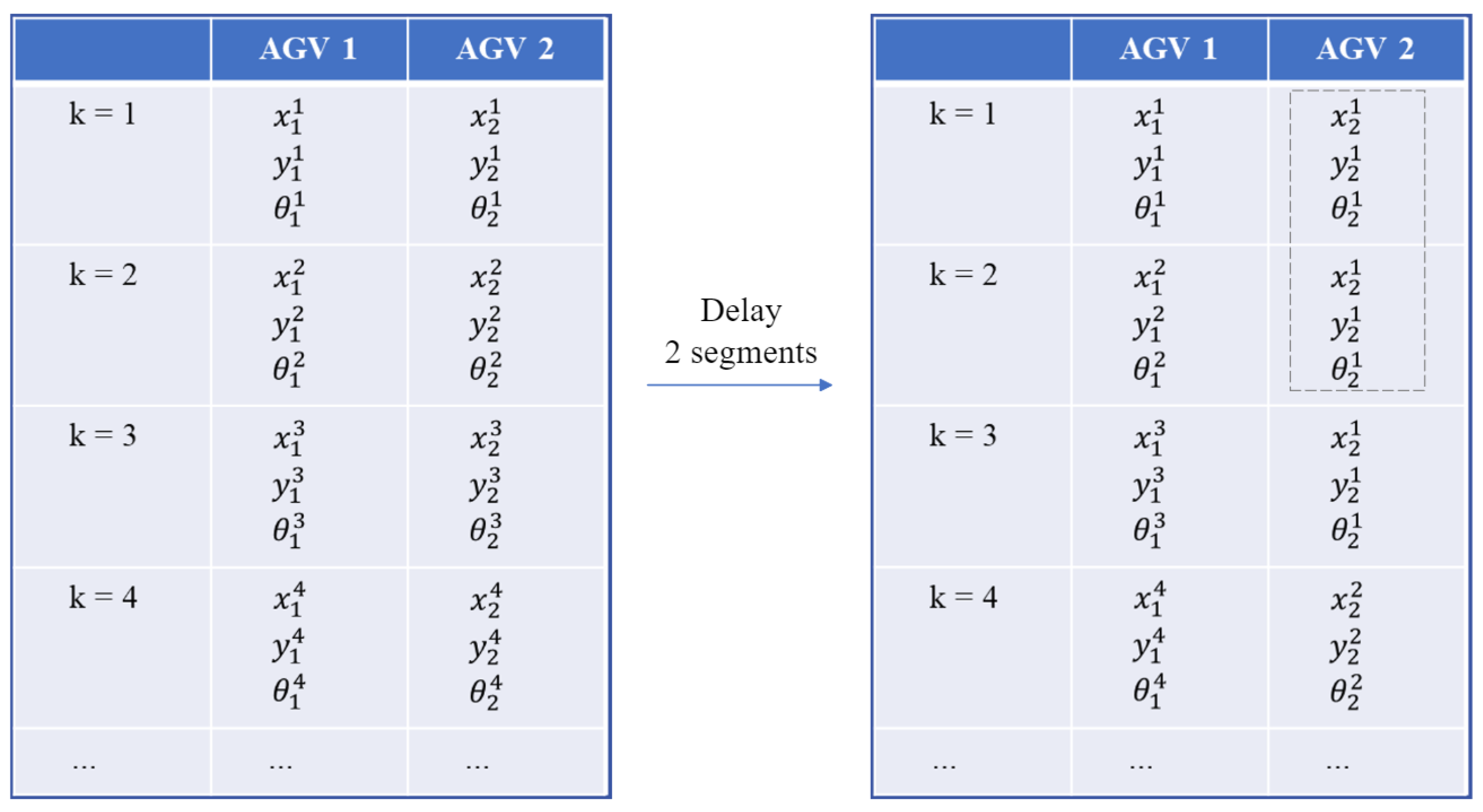
It computes the follower-AGVs’ path with a quick computation, even though the number of AGVs is large. Unnecessary turning costs and path segments are avoided in this model. Each AGV only considers its neighbours in the path and tends to move as its neighbours. For swarm integration or separation, the start–destination matrix plays a role. It determines whether the multi-AGV group is aimed at the same destination and makes changes in the decentralized follower layer. Segment delay is implemented for optimal arrangement between AGVs for loading.
The proposed WLVM has the following benefits: accurate direction, dynamic swarms, fast convergence, and collision avoidance. It can achieve real-time implementation due to its computational speed and robust implementation. For the computational experiment, four groups with different settings demonstrate swarm separation and integration. The proposed algorithm is compared with other algorithms for path planning of four AGVs; the WLVM saves 98.39% and 47.41% computational time than the RRT* and DA-APF algorithms, respectively. WLVM is robust and simple for implementation during the AGVs’ or robots’ operations. The proposed algorithm can be applied to various scenarios involving the system of multiple robots, such as warehouses, logistics systems, ports, and airports.
The limitation of the proposed approach is that it does not consider the cost value during the path planning as the heuristic methodologies. Therefore, the generated path cannot be measured or estimated with the specific costs to determine whether the path is globally optimal. The robot’s dynamics and different speed scenarios must be considered during the real-world application. With the following considerations, WLVM would be more practical in the industrial environment for future work. Mission planning and task allocation can be included in the further improvement of this model. The multi-AGV system would be more practical if it involves fault tolerance during implementation. The combination of sensors and the sensor-fusion algorithm could be considered in further real experiments to estimate the angle and the position and detect and avoid obstacles. Implementing a neural network for the path-planning approach can be considered a potential improvement.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}