
Standing Balance Control of a Bipedal Robot Based on Behavior Cloning
Abstract
:1. Introduction
2. Materials and Methods
2.1. Overview of Developed Balance Control System
2.2. Teleoperation System for Collecting Human Demonstration Data
2.2.1. Bipedal Robot
2.2.2. Teleoperation System with Balance Feedback Interface
2.3. Balance Controller Trained by Human Demonstration
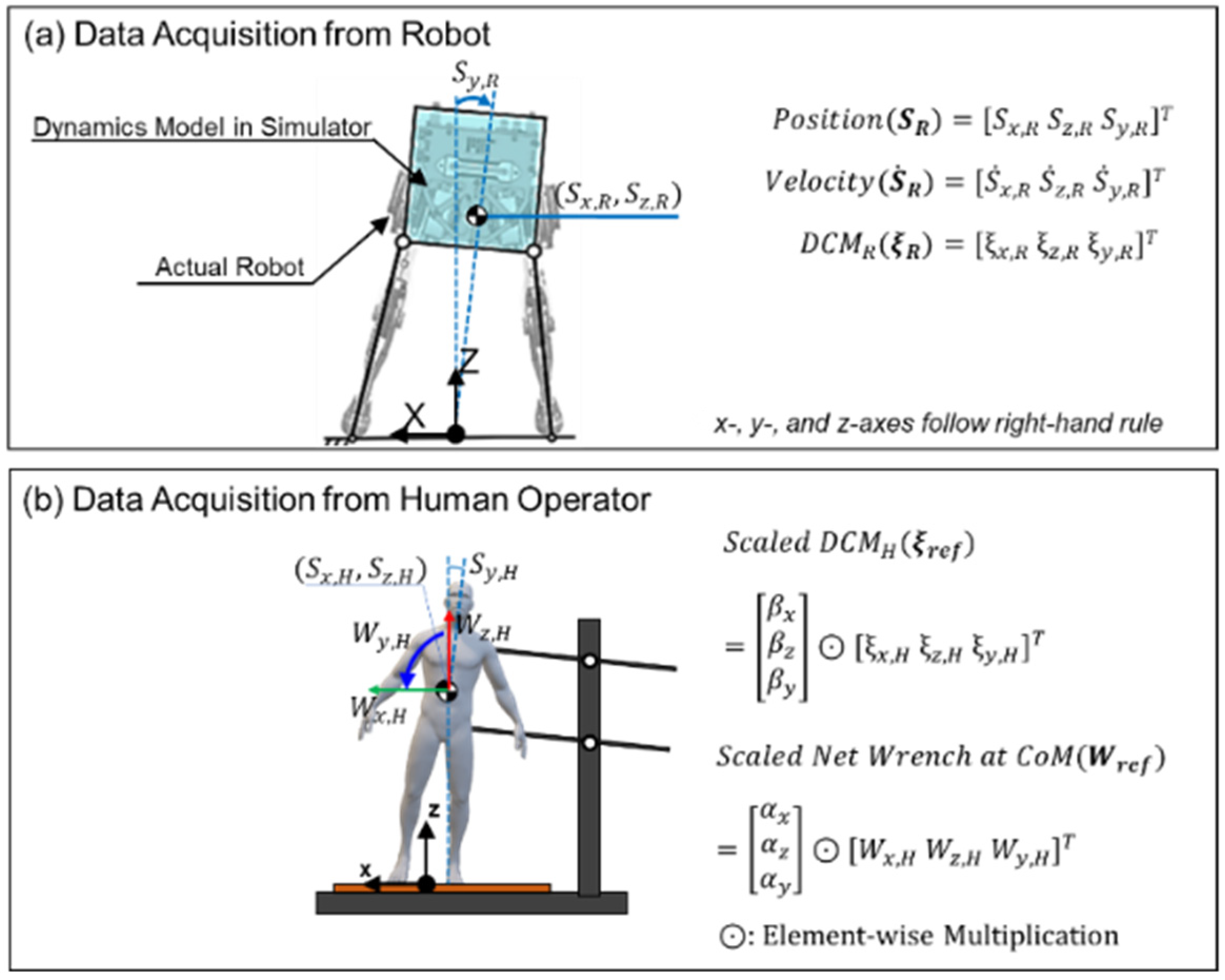
2.3.1. Acquisition of Training Data from Human-Operated Balancing
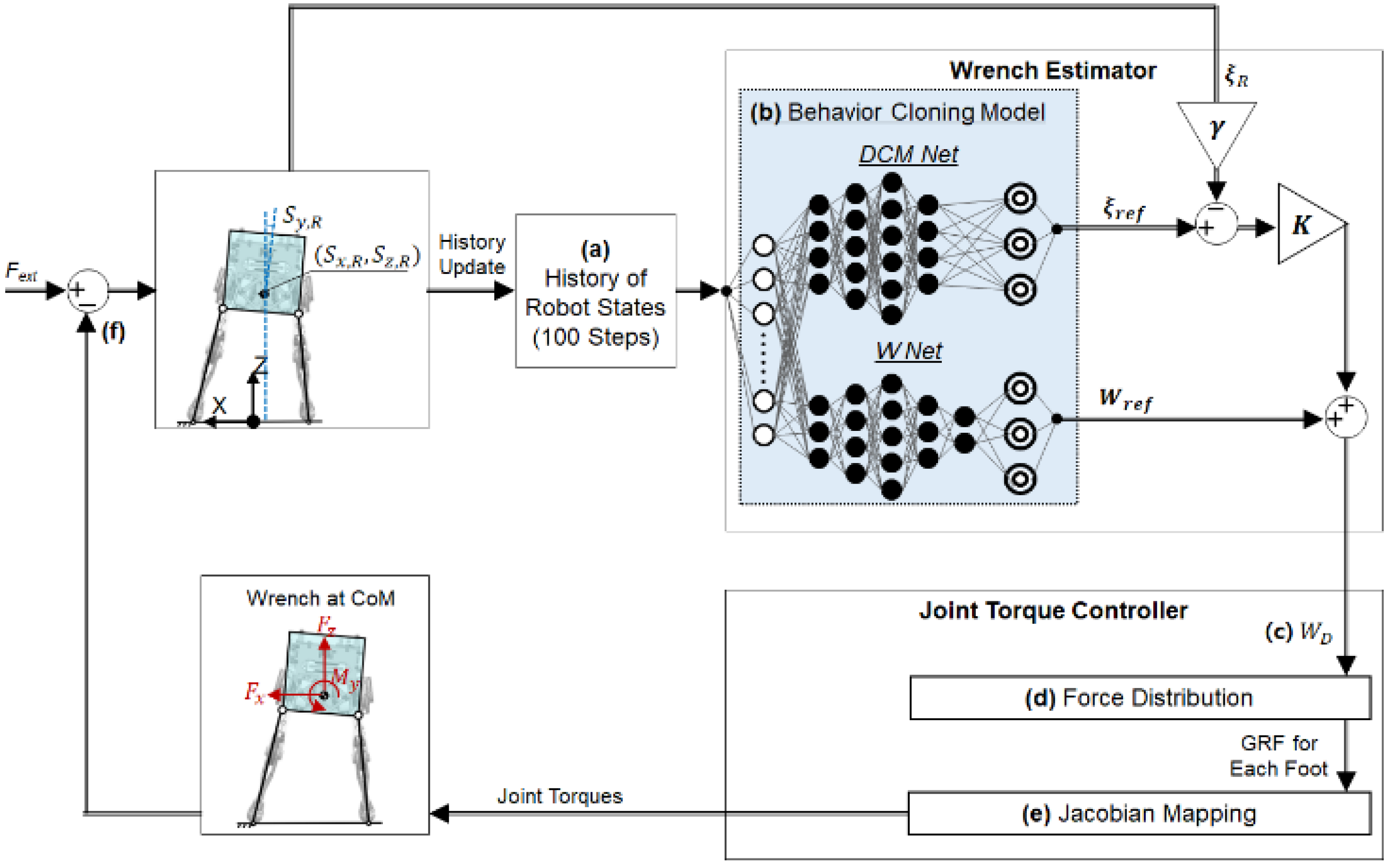
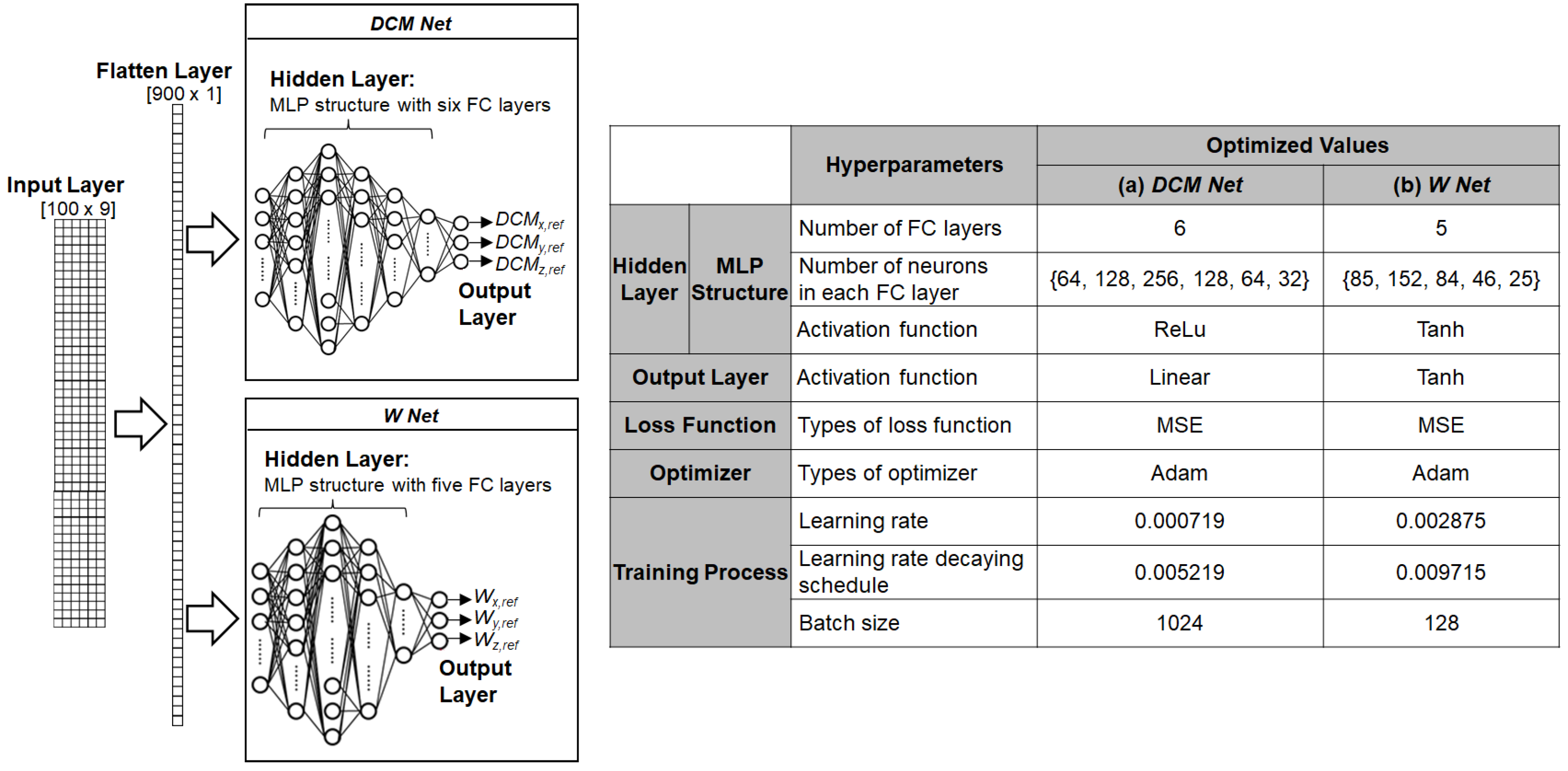
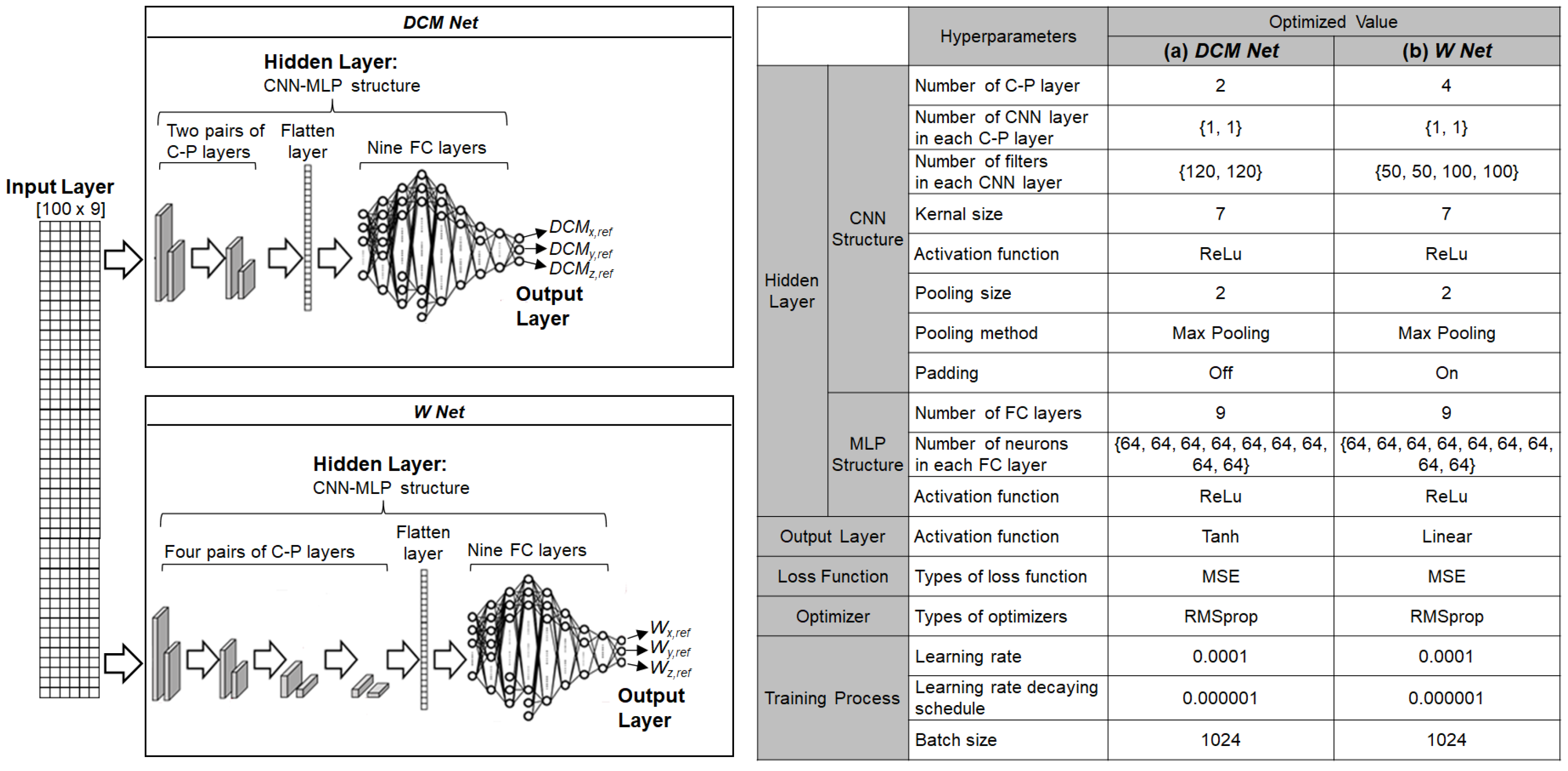
2.3.2. Balance Controller Trained by Human Demonstration Data
2.4. Simulation and Experimental Tests of Balance Controller
2.4.1. Simulation Tests with Robot Dynamics Simulator
2.4.2. Experimental Tests with Actual Robot
3. Results and Discussion
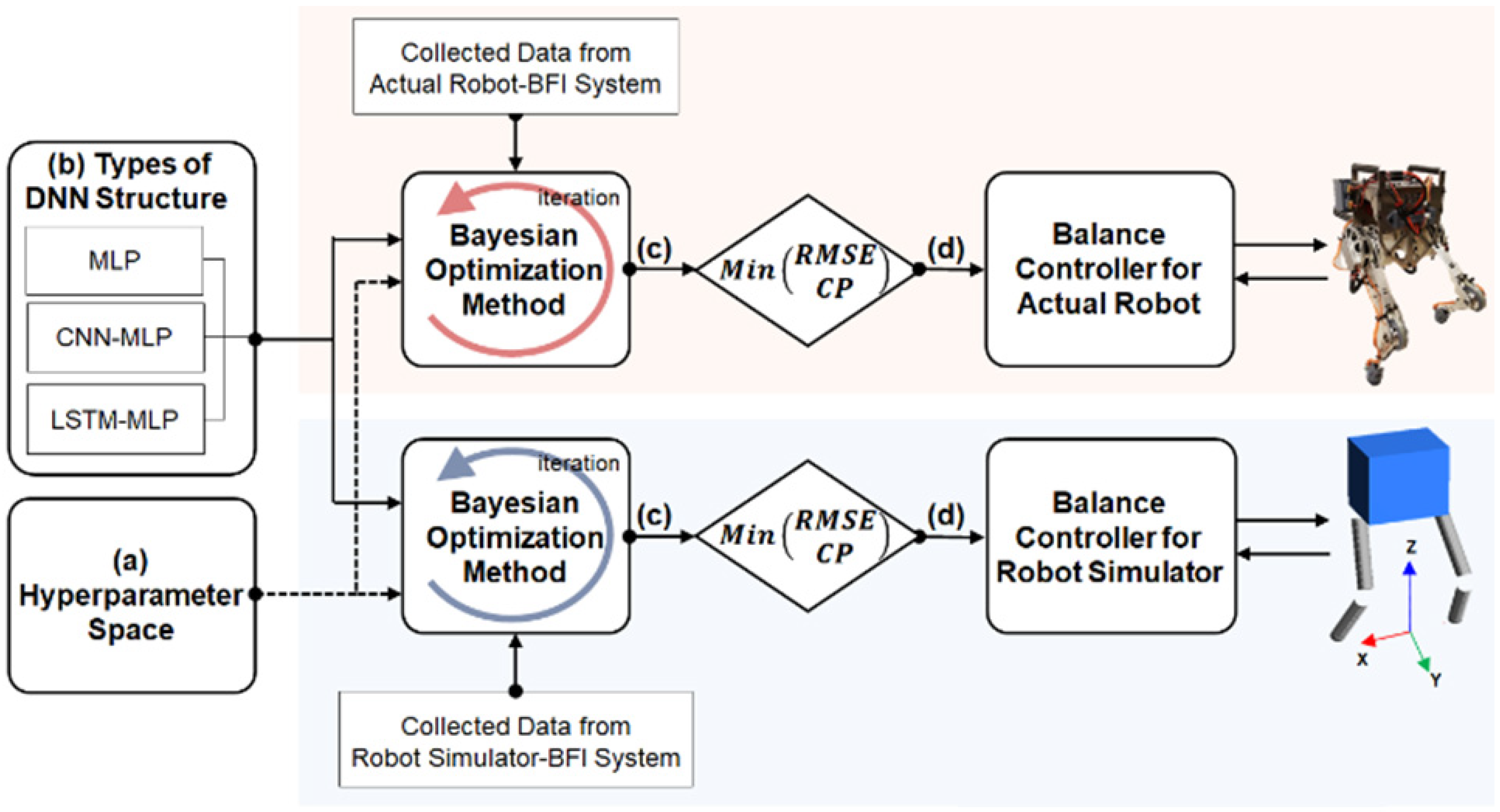
3.1. Selected DNN Structures Based on Performance Comparison
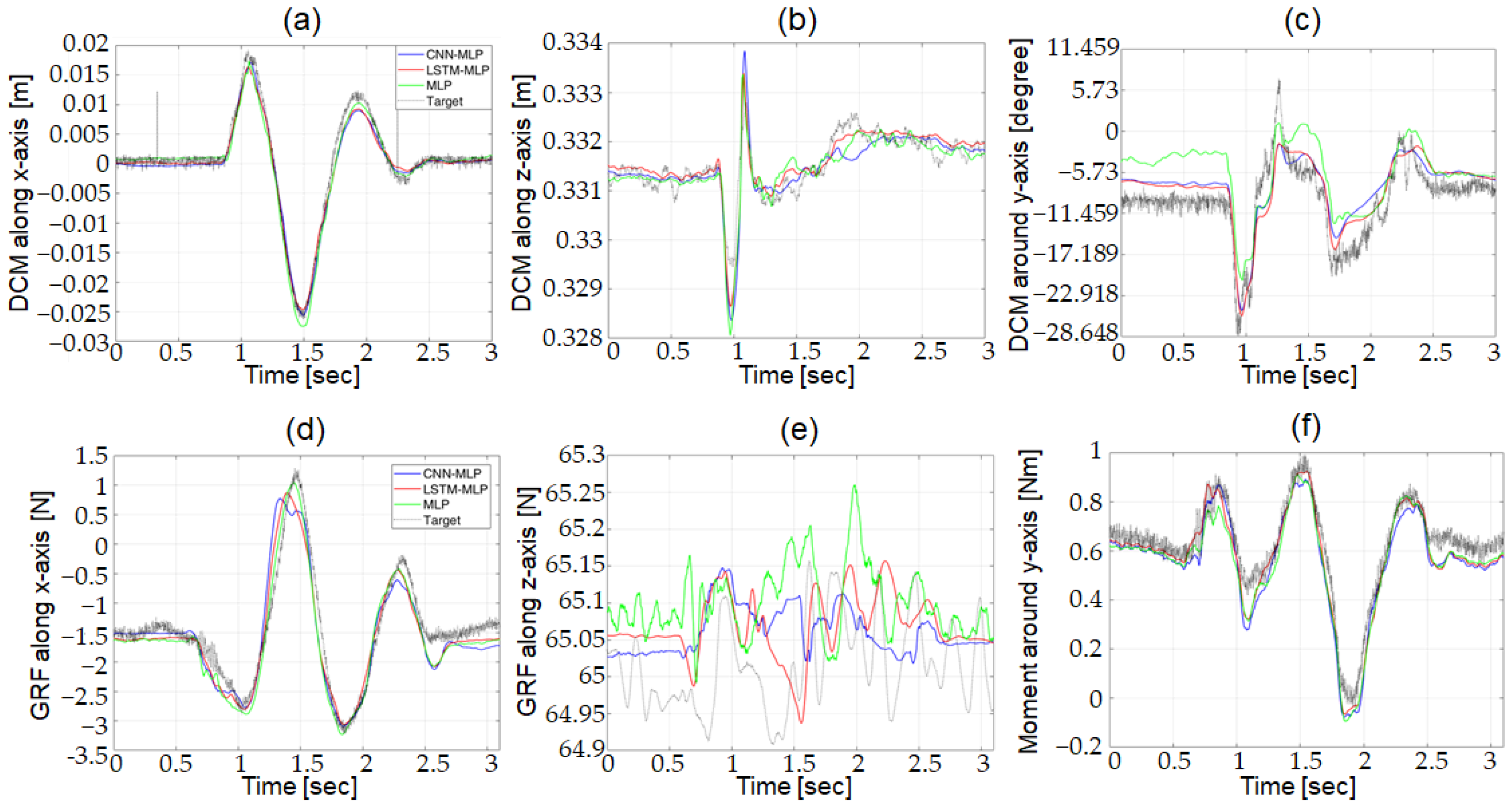
3.1.1. Comparison of DNN Structures for Robot Dynamic Simulator
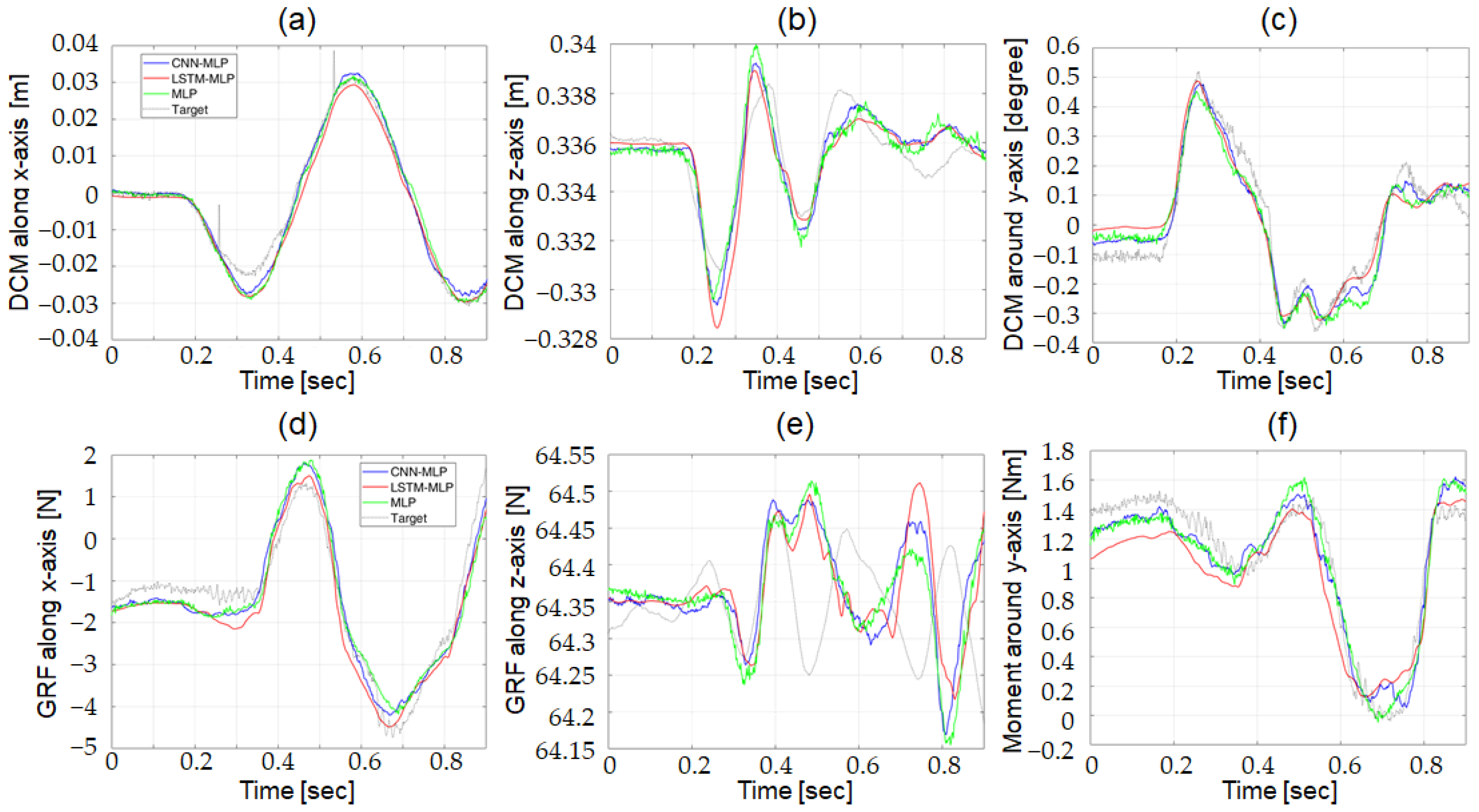
3.1.2. Comparison of DNN Structures for the Actual Robot
3.2. Performance of Balance Controller in Robotic Dynamic Simulator
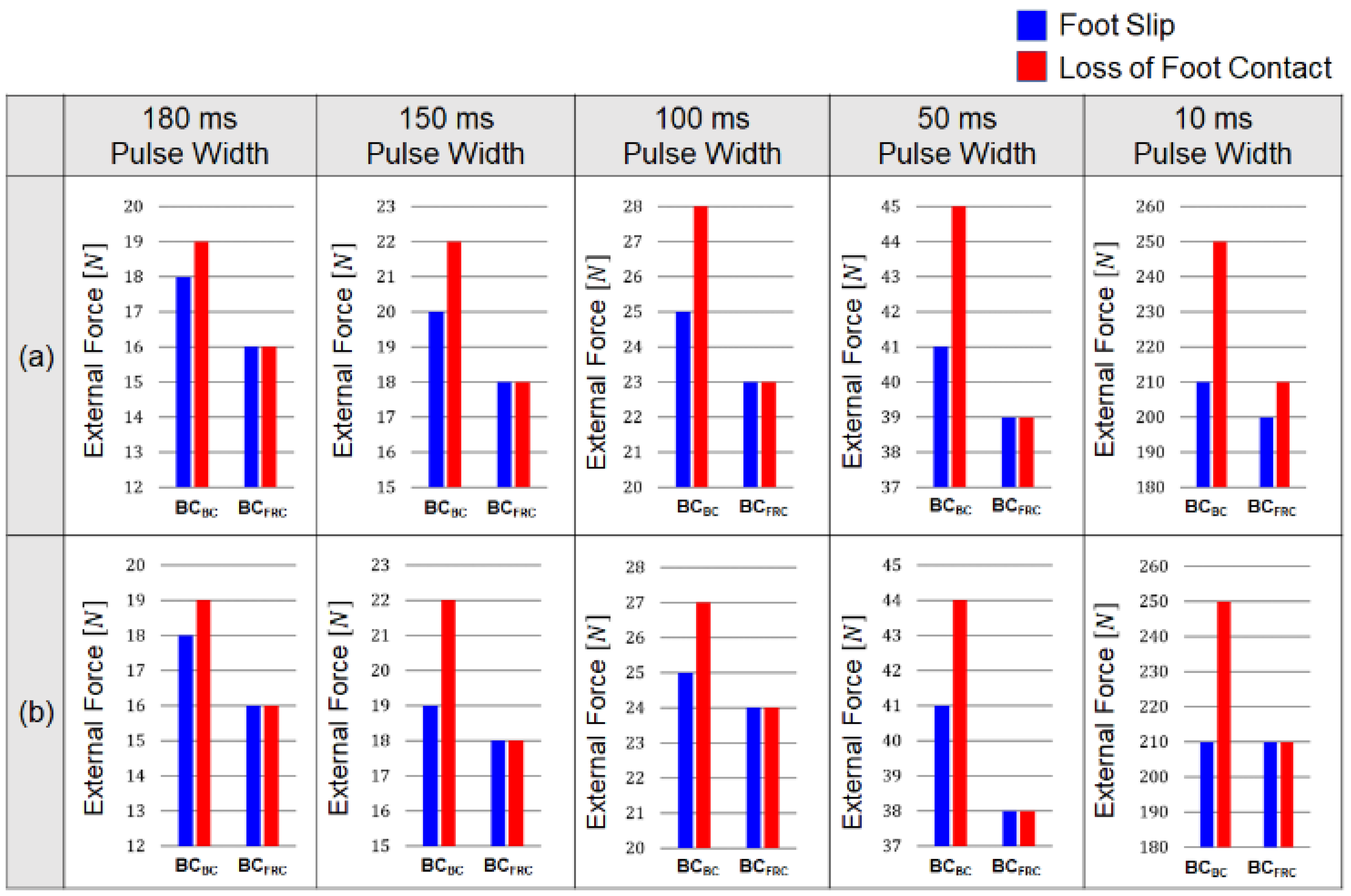
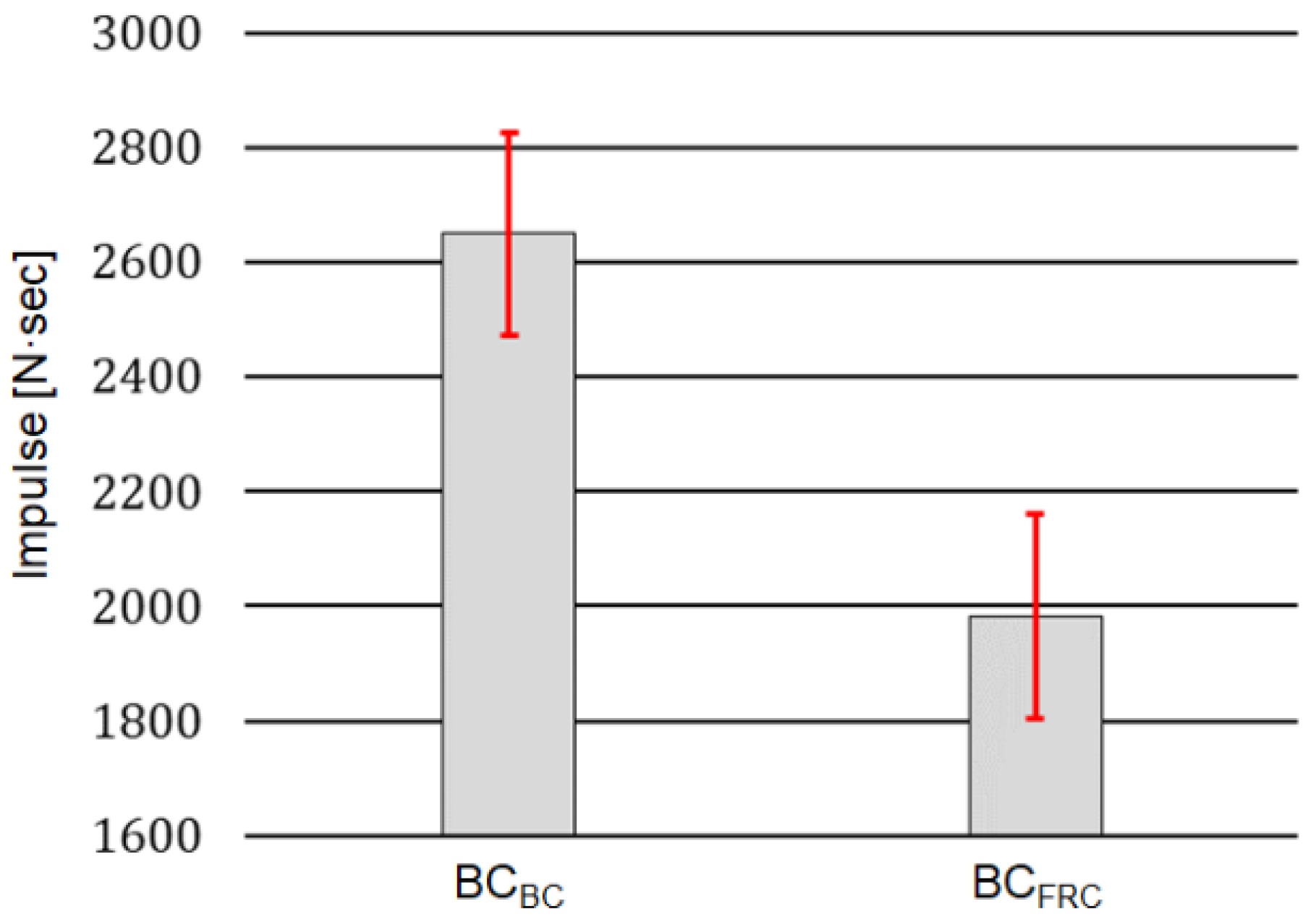
3.2.1. Resistance to Balance Loss
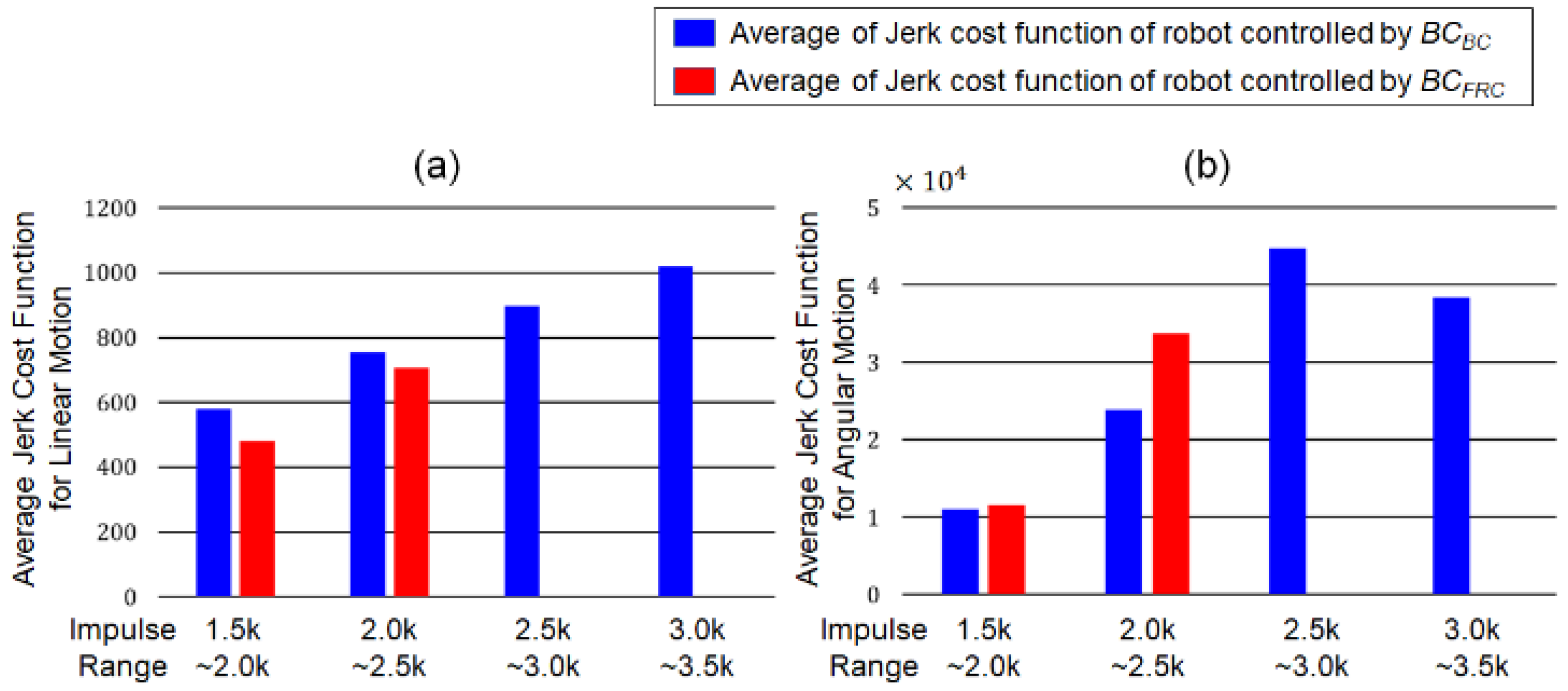
3.2.2. Jerkiness of Balancing Motion
3.3. Performance of Balance Controller in Actual Robot
3.3.1. Resistance to Balance Loss
3.3.2. Jerkiness of Balancing Motion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Park, S.; Oh, Y.; Hong, D. Disaster response and recovery from the perspective of robotics. Int. J. Precis. Eng. Manuf. 2017, 18, 1475–1482. [Google Scholar] [CrossRef]
- Luo, R.C.; Lin, S.J. Impedance and force compliant control for bipedal robot walking on uneven terrain. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Hong Kong, China, 9–12 October 2015. [Google Scholar]
- Morisawa, M.; Kajita, S.; Kanehiro, F.; Kaneko, K.; Miura, K.; Yokoi, K. Balance control based on capture point error compensation for biped walking on uneven terrain. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Osaka, Japan, 29 November–1 December 2012. [Google Scholar]
- Sugihara, T.; Nakamura, Y. Whole-body cooperative balancing of humanoid robot using COG Jacobian. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002. [Google Scholar]
- Kajita, S.; Morisawa, M.; Miura, K.; Nakaoka, S.; Harada, K.; Kaneko, K.; Kanehiro, F.; Yokoi, K. Biped walking stabilization based on linear inverted pendulum tracking. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Hyon, S.-H. Compliant Terrain Adaptation for Biped Humanoids Without Measuring Ground Surface and Contact Forces. IEEE Trans. Robot. 2009, 25, 171–178. [Google Scholar] [CrossRef]
- Lee, S.H.; Goswami, A. Ground reaction force control at each foot: A momentum-based humanoid balance controller for non-level and non-stationary ground. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Ott, C.; Maximo, A.R.; Hirzinger, G. Posture and balance control for biped robots based on contact force optimization. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011. [Google Scholar]
- Henze, B.; Ott, C.; Maximo, A.R. Posture and balance control for humanoid robots in multi-contact scenarios based on model predictive control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Audren, H.; Vaillant, J.; Kheddar, A.; Escande, A.; Kaneko, K.; Yoshida, E. Model preview control in multi-contact motion-application to a humanoid robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Righetti, L.; Buchli, J.; Mistry, M.; Kalakrishnan, M.; Schaal, S. Optimal distribution of contact forces with inverse-dynamics control. Int. J. Robot. Res. 2013, 32, 280–298. [Google Scholar] [CrossRef]
- Lee, Y.; Hwang, S.; Park, J. Balancing of humanoid robot using contact force/moment control by task-oriented whole body control framework. Auton. Robot. 2016, 40, 457–472. [Google Scholar] [CrossRef]
- Latash, M. Exemplary behaviors. In Fundamentals of Motor Control; Academic Press: Cambridge, MA, USA, 2013; pp. 211–259. [Google Scholar]
- Horak, F.B. Postural orientation and equilibrium: What do we need to know about neural control of balance to prevent falls? Age Ageing 2006, 25, ii7–ii11. [Google Scholar] [CrossRef] [Green Version]
- Windhorst, U. The spinal cord and its brain: Representations and models. To what extent do forebrain mechanisms appear at brainstem spinal cord levels? Prog. Neurobiol. 1996, 49, 381–414. [Google Scholar] [CrossRef]
- Poppele, R.; Bosco, G. Sophisticated spinal contributions to motor control. Trends Neurosci. 2003, 26, 269–276. [Google Scholar] [CrossRef]
- Jeka, J.; Kiemel, T.; Creath, R.; Horak, F.; Peterka, R. Controlling Human Upright Posture: Velocity Information Is More Accurate Than Position or Acceleration. J. Neurophysiol. 2004, 92, 2368–2379. [Google Scholar] [CrossRef]
- Schweigart, G.; Mergner, T. Human stance control beyond steady state response and inverted pendulum simplification. Exp. Brain Res. 2008, 185, 635–653. [Google Scholar] [CrossRef]
- Balestrucci, P.; Daprati, E.; Lacquaniti, F.; Maffei, V. Effects of visual motion consistent or inconsistent with gravity on postural sway. Exp. Brain Res. 2017, 235, 1999–2010. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Hinton, G.; Deng, L.; Yu, D.; Dahl, G.E.; Mohamed, A.-R.; Jaitly, N.; Senior, A.; Vanhoucke, V.; Nguyen, P.; Sainath, T.N.; et al. Deep Neural Networks for Acoustic Modeling in Speech Recognition. IEEE Signal Process. Mag. 2012, 29, 82–97. [Google Scholar] [CrossRef]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G.; et al. Human-level control through deep reinforcement learning. Nature 2015, 518, 529–533. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Springenberg, J.T.; Boedecker, J.; Burgard, W. Deep reinforcement learning with successor features for navigation across similar environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Tai, L.; Paolo, G.; Liu, M. Virtual-to-real deep reinforcement learning: Continuous control of mobile robots for mapless navigation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Yu, T.; Finn, C.; Dasari, S.; Xie, A.; Zhang, T.; Abbeel, P.; Levine, S. One-Shot Imitation from Observing Humans via Domain-Adaptive Meta-Learning. arXiv 2018, arXiv:1802.01557. [Google Scholar]
- Devineau, G.; Polack, P.; Altche, F.; Moutarde, F. Coupled Longitudinal and Lateral Control of a Vehicle using Deep Learning. arXiv 2018, arXiv:1810.09365. [Google Scholar]
- Missura, M.; Behnke, S. Online Learning of Bipedal Walking Stabilization. KI-Künstl. Intell. 2015, 29, 401–405. [Google Scholar] [CrossRef]
- Kormushev, P.; Ugurlu, B.; Calinon, S.; Tsagarakis, N.G.; Caldwell, D.G. Bipedal walking energy minimization by reinforcement learning with evolving policy parameterization. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Zucker, M.; Ratliff, N.; Stolle, M.; Chestnutt, J.; Bagnell, J.A.; Atkeson, C.G.; Kuffner, J. Optimization and learning for rough terrain legged locomotion. Int. J. Robot. Res. 2011, 30, 175–191. [Google Scholar] [CrossRef]
- Maeda, G.J.; Neumann, G.; Ewerton, M.; Lioutikov, R.; Kroemer, O.; Peters, J. Probabilistic movement primitives for coordination of multiple human-robot collaborative tasks. Auton. Robot. 2017, 41, 593–612. [Google Scholar] [CrossRef] [Green Version]
- Lioutikov, R.; Neumann, G.; Maeda, G.; Peters, J. Learning movement primitive libraries through probabilistic segmentation. Int. J. Robot. Res. 2017, 36, 879–894. [Google Scholar] [CrossRef]
- Osa, T.; Sugita, N.; Mitsuishi, M. Online Trajectory Planning and Force Control for Automation of Surgical Tasks. IEEE Trans. Autom. Sci. Eng. 2017, 15, 675–691. [Google Scholar] [CrossRef]
- Ibanez, A.; Bidaud, P.; Padois, V. Unified preview control for humanoid postural stability and upper-limb interaction ad-aptation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012. [Google Scholar]
- Ott, C.; Henze, B.; Lee, D. Kinesthetic teaching of humanoid motion based on whole-body compliance control with interaction-aware balancing. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Albu-Schaffer, A.; Ott, C.; Frese, U.; Hirzinger, G. Cartesian impedance control of redundant robots: Recent results with the DLR-light-weight-arms. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003. [Google Scholar] [CrossRef]
- Ramos, J.; Katz, B.; Chuah, M.Y.M.; Kim, S. Facilitating Model-Based Control through Software-Hardware Co-Design. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018. [Google Scholar]
- Todorov, E.; Erez, T.; Tassa, Y. MuJoCo: A physics engine for model-based control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012. [Google Scholar]
- Takenaka, T.; Matsumoto, T.; Yoshiike, T.; Shirokura, S. Real time motion generation and control for biped robot-2nd report: Running gait pattern generation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009. [Google Scholar]
- Graves, A.; Mohamed, A.; Hinton, G. Speech recognition with deep recurrent neural networks. arXiv 2013, arXiv:1303.5778. [Google Scholar]
- Malhotra, P.; Vig, L.; Shroff, G.; Agarwal, P. Long short term memory networks for anomaly detection in time series. In Proceedings of the European Symposium on Artificial Neural Networks, Bruges, Belgium, 22–24 April 2015. [Google Scholar]
- Bao, W.; Yue, J.; Rao, Y. A deep learning framework for financial time series using stacked autoencoders and long-short term memory. PLoS ONE 2017, 12, e0180944. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Makridakis, S.; Spiliotis, E.; Assimakopoulos, V. Statistical and Machine Learning forecasting methods: Concerns and ways forward. PLoS ONE 2018, 13, e0194889. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Chen, Y.; Hao, S.; Peng, X.; Hu, L. Deep Learning for Sensor-based Activity Recognition: A Survey. arxiv. arXiv 2018, arXiv:1707.03502. [Google Scholar] [CrossRef] [Green Version]
- Pope, M.H.; Bevins, T.; Wilder, D.G.; Frymoyer, J.W. The Relationship between Anthropometric, Postural, Muscular, and Mobility Characteristics of Males Ages 18–55. Spine 1985, 10, 644–648. [Google Scholar] [CrossRef] [PubMed]
- Kyriakopoulos, K.J.; Saridis, G.N. Minimum jerk path generation. In Proceedings of the IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988. [Google Scholar]
- Constantinescu, D.; Croft, E. Smooth and time-optimal trajectory planning for industrial manipulators along specified paths. J. Robot. Syst. 2000, 17, 233–249. [Google Scholar] [CrossRef]
- Plamondon, R. A kinematic theory of rapid human movements: Part I. Movement representation and generation. Biol. Cybern. 1995, 72, 295–307. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameters | Explored Range | ||
|---|---|---|---|
| Hidden Layer | MLP Structure | Number of fully connected layers | Integers |
| Number of neurons in each fully connected layer | Integers | ||
| Activation function for neurons | {Tanh, ReLu, Linear} | ||
| CNN Structure | Number of CNN-pooling Layers | Integers | |
| Number of CNN layers in each CNN-pooling layer | {1, 2, 3} | ||
| Number of filters in each CNN layer | Integers | ||
| Kernel size | {3, 5, 7} | ||
| Activation function for CNN layers | {Tanh, ReLu, Linear} | ||
| Pooling size | {2, 3, 4, 5} | ||
| Pooling method | {Max, Average} | ||
| Padding | {On, Off} | ||
| LSTM Structure | Number of LSTM cells in each LSTM layer | Integers | |
| Number of LSTM layers to be stacked | {1, 2, 3} | ||
| Output Layer | Activation function | {Tanh, ReLu, Linear} | |
| Loss Function | Types of loss function | {MSE, Hubber, Log-Cosh} | |
| Optimizer | Types of optimizers | {SGD, Adam, RMSprop} | |
| Training Process | Learning rate | Real Numbers | |
| Learning rate decaying schedule | Real Numbers | ||
| Batch size | Integers | ||
| Type of DNN | Optimized DNN Structure | RMSE in x-Axis | RMSE in z-Axis | RMSE in y-Axis | Computation Time |
|---|---|---|---|---|---|
| DCM Net | MLP | 0.0081 m | 0.0042 m | 0.0026° | 0.235 ms |
| CNN-MLP | 0.0091 m | 0.0042 m | 0.0021° | 0.316 ms | |
| LSTM-MLP | 0.0072 m | 0.0041 m | 0.0021° | 1.171 ms | |
| W Net | MLP | 0.00057 N | 0.0019 N | 0.0033 Nm | 0.11 ms |
| CNN-MLP | 0.0054 N | 0.0019 N | 0.0032 Nm | 0.713 ms | |
| LSTM-MLP | 0.0055 N | 0.0019 N | 0.0031 Nm | 4.153 ms |
| Type of DNN | Optimized DNN Structure | RMSE in x-Axis | RMSE in z-Axis | RMSE in y-Axis | Computation Time |
|---|---|---|---|---|---|
| DCM Net | MLP | 0.0113 m | 0.0046 m | 0.0033° | 0.0755 ms |
| CNN-MLP | 0.011 m | 0.0044 m | 0.003° | 0.5104 ms | |
| LSTM-MLP | 0.0132 m | 0.0044 m | 0.0028° | 2.5324 ms | |
| W Net | MLP | 0.0095 N | 0.0018 N | 0.0144 Nm | 0.767 ms |
| CNN-MLP | 0.0093 N | 0.0018 N | 0.0124 Nm | 0.2918 ms | |
| LSTM-MLP | 0.0096 N | 0.0018 N | 0.0112 Nm | 14.2904 ms |
| Jerk Cost Function | Amplitude of External Force | |||||||
|---|---|---|---|---|---|---|---|---|
| 21 N | 22 N | 23 N | 24 N | 25 N | 26 N | 27 N | ||
| Linear Component | BCBC | 61.4 | 75.5 | 88.2 | 99.1 | 106.7 | 103.6 | 113.1 |
| BCFRC | 75.1 | 134.5 | Loss of Foot Contact | |||||
| Angular Component | BCBC | 762.8 | 2595.4 | 4303.8 | 5356.3 | 5902.7 | 5749.5 | 7476.3 |
| BCFRC | 4073.9 | 20,555 | Loss of Foot Contact | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bong, J.H.; Jung, S.; Kim, J.; Park, S. Standing Balance Control of a Bipedal Robot Based on Behavior Cloning. Biomimetics 2022, 7, 232. https://doi.org/10.3390/biomimetics7040232
Bong JH, Jung S, Kim J, Park S. Standing Balance Control of a Bipedal Robot Based on Behavior Cloning. Biomimetics. 2022; 7(4):232. https://doi.org/10.3390/biomimetics7040232
Chicago/Turabian StyleBong, Jae Hwan, Suhun Jung, Junhwi Kim, and Shinsuk Park. 2022. "Standing Balance Control of a Bipedal Robot Based on Behavior Cloning" Biomimetics 7, no. 4: 232. https://doi.org/10.3390/biomimetics7040232