
Effect of the Thumb Orientation and Actuation on the Functionality and Performance of Affordable Prosthetic Hands: Obtaining Design Criteria
 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Affordable Prosthetic Hands
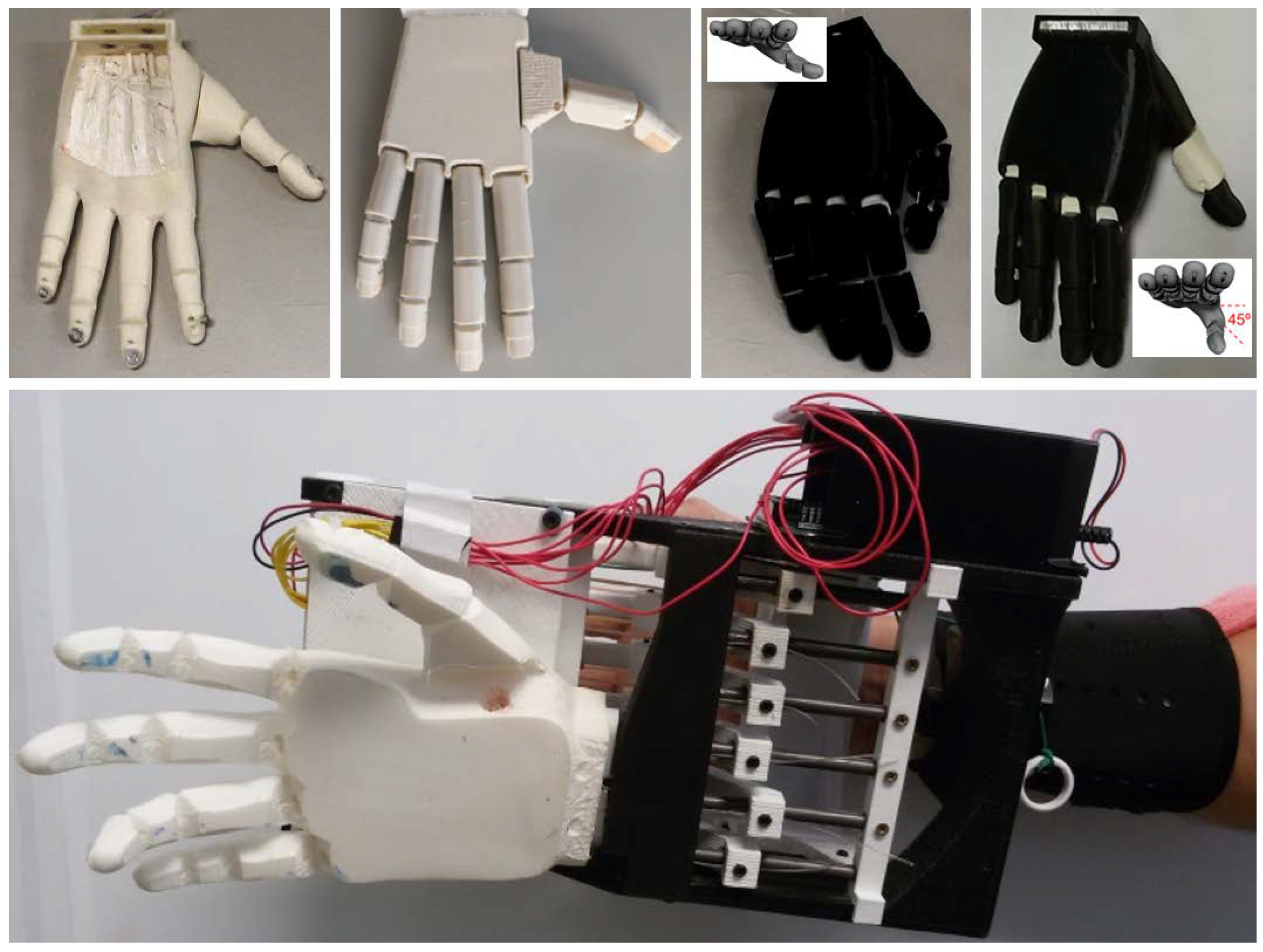
- Dextrus v2.0 [37]: This hand has flexible joints fully integrated within its rubberized and flexible unibody design made of Ninjaflex®. After printing, the nylon threads just need to be routed. There is no need for assembly, although the substitution of individual fingers is impossible if broken. Particularly, the thumb presents three DOF (IP, MCP, and CMC hinge joints) underactuated by one tendon. In the present document, we will recall this model simply as Dextrus.
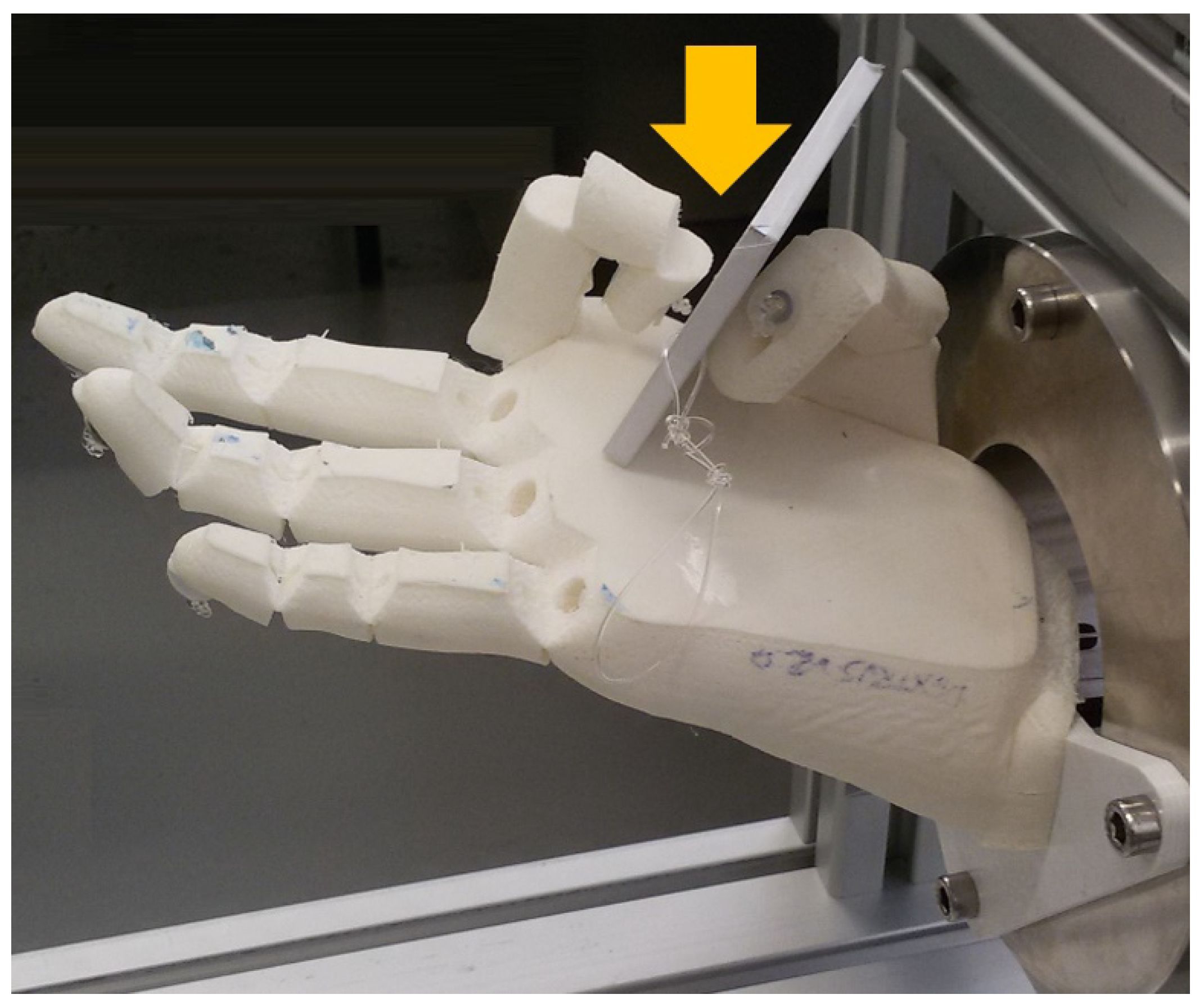
- Lb-0 and Lb-45 (Limbitless) [38,39]: the original design of the Limbitless hand was developed by the University of Central Florida Armory on the basis of the wrist BP Flexy-Hand [40]. In this device, the CMC joint of the thumb is absent, the first metacarpal being fused to the palm body. This leaves only two DOF for the thumb (IP and MCP hinge joints). It is available either without palmar abduction or with a palmar abduction of 45 degrees of the thumb, see Figure 4. We will recall these designs as Lb-0 and Lb-45, respectively. Any Limbitless hand was originally intended to work with one actuator in the forearm or beyond (one DOC), thus closing fingers and thumb together. In the present study, however, this fact was unobserved, and each tendon was pulled independently for each digit, thus having five DOC.
- IMMA hand [41]: inspired in some existing affordable hands such as the Dextrus and the Limbitless, the main characteristic is that the movements of the thumb are actuated separately by means of two different tendons, thus having two DOC for the thumb: one for flexion at IP and MCP joints, and another for abduction at the CMC. Different materials based on different combinations of PLA and thermoplastic polyurethane (TPU) were used in the construction of the hand. In the present document, we will recall this model as IMMA.
2.2. Able-Bodied Adaptor (ABA)
2.3. Methods
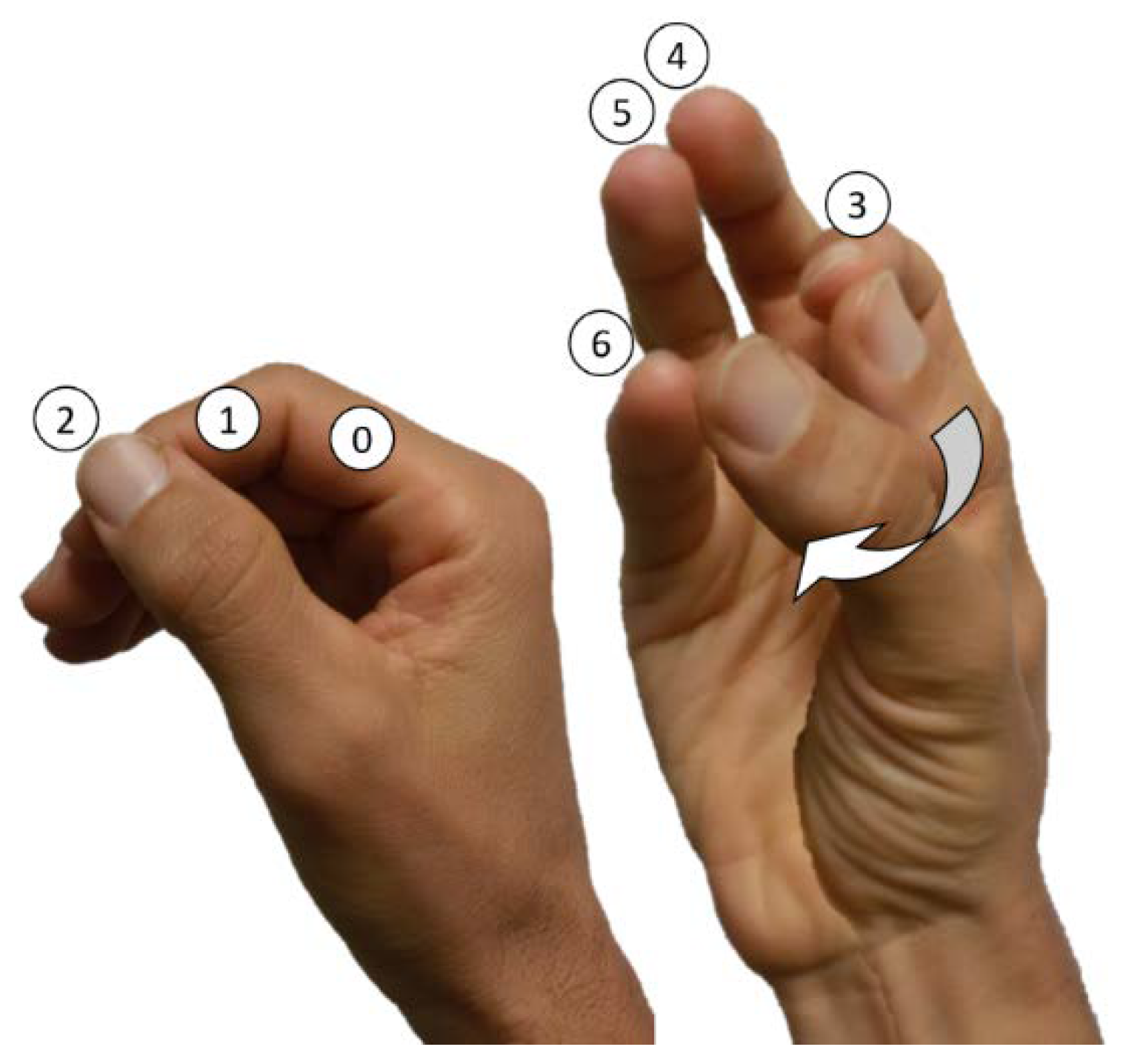
2.3.1. Kapandji Opposition Test for Prosthetic Devices
2.3.2. Reduced Southampton Hand Assessment Procedure (SHAP)
2.3.3. Anthropomorphic Hand Assessment Protocol (AHAP)
3. Results
3.1. SHAP Results
3.2. AHAP Results
4. Discussion
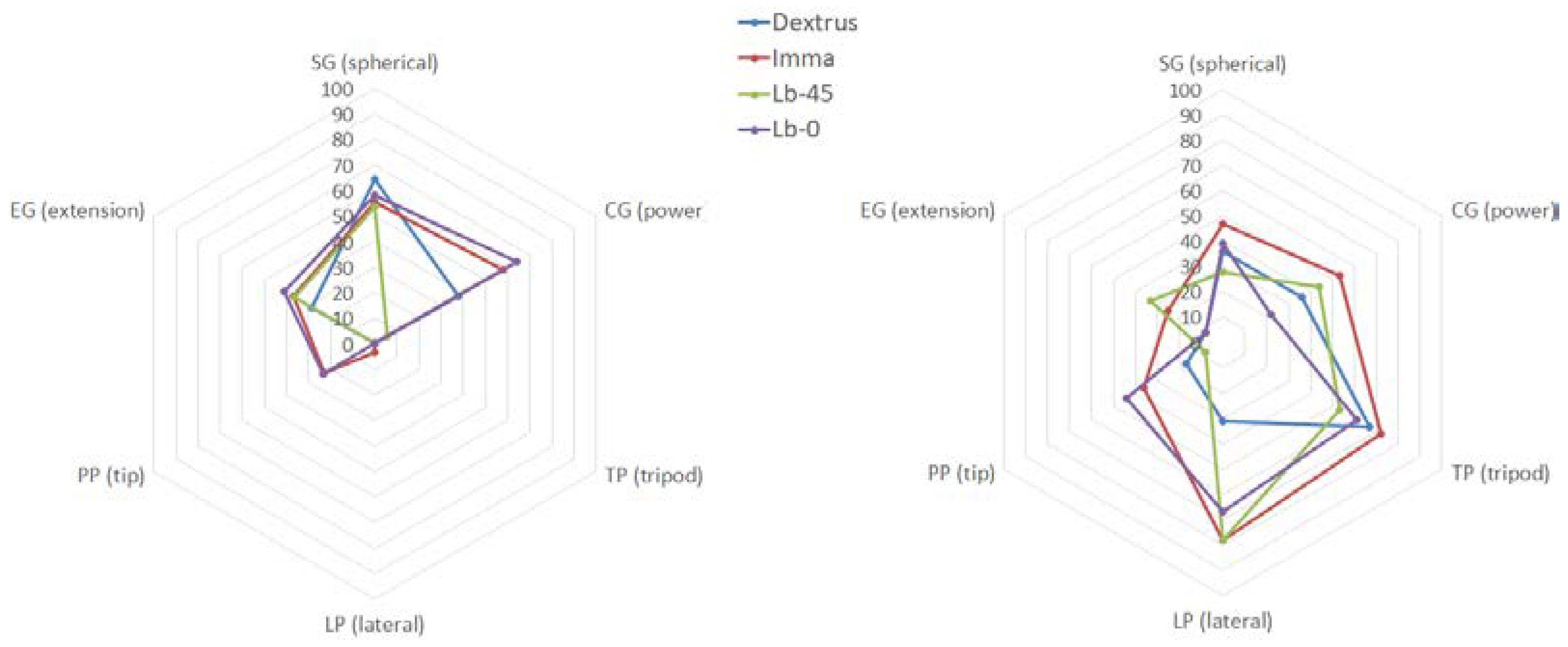
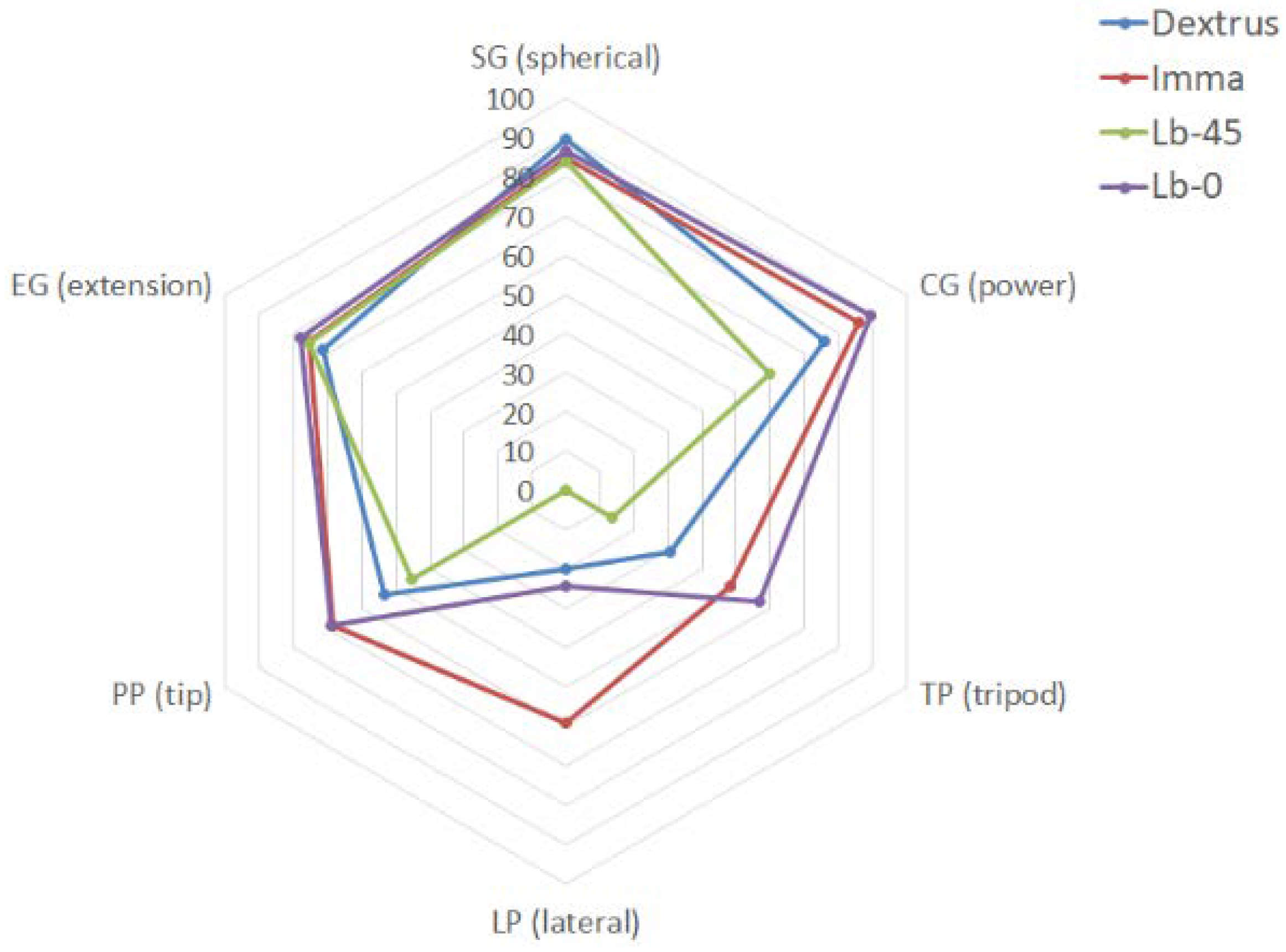
- SG (spherical): Although all hands performed SHAP quite well, a fixed palmar abduction of the thumb may cause instability in grasping the different sizes of the spherical objects used at the AHAP.
- CG (power): again, high variability in the pGAS for the Limbitless models is observed due to the dependence between the abduction of the thumb and the various objects of the AHAP. It should be noted that Lb-0 got the best Ts with the SHAP for Cylinder L, but the object was instinctively grasped from the top. Again, it gives rise to a debate about getting a good performance while the functionality of the cylindrical grasp in this model was scarce.
- TP (tripod): being one of the trickiest GT due to the need for coordination amongst the thumb, the index and medium fingers, all hands showed having this function (all have similar pGAS), with IMMA and Dextrus taking the best scores. Leaving aside the fact that the Lb-0 had the proper abduction of the thumb for this particular SHAP task, the comparison between the performances of the IMMA and Dextrus backs up the convenience of having two independent DOCs at the thumb for F/E and Ab/Ad.
- LP (lateral), PP (tip), and EG (extension): these three grasps at the SHAP involve grasping a fine plate of balsa wood. The first observation is that Dextrus does not function properly for these GTs (see Figure 12). Accordingly, note that functionality was merely demonstrated in the Kapandji (see Figure 6) and the pGAS (Figure 10-right, using some thicker objects of the YCB set). That said, the performance is a dissimilar approach when assessing the hand with the SHAP. The rated performance results from instinctive alternatives of grasping, but all of them are highly unstable., such as pressing against the dorsum of the thumb, as mentioned in Section 3.1. Regarding the Limbitless models, while they both provide the function of LP (as seen with the Kapandji test), they swap their places in the ranking when it comes to the PP and EG (see Figure 10-right). It also may be due to what was pointed out with the Kapandji test, that is, how the force is exerted: Lb-0 may exert a greater closure force against the index alone for a sort of PP grip; Lb-45 has a loose contact with the radial side of the index finger but opposes better against the whole set of fingers for an EG.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | Three-dimensional |
| Ab/Ad | Abduction/Adduction |
| ABA | Able-Bodied Adaptor |
| ABS | Acrylonitrile butadiene styrene |
| ADL | Activities of daily living |
| AHAP | Anthropomorphic Hand Assessment Protocol |
| BP | Body-powered |
| CAD | Computer Aided Design |
| CG | Cylindrical grip |
| CMC | Carpometacarpal |
| DIP | Distal interphalangeal |
| DOC | Degree(s) of control |
| DOF | Degree(s) of freedom |
| DVG | Diagonal volar grip |
| EG | Extension grip |
| F/E | Flexion/Extension |
| FDM | Fused deposition modelling |
| GAS | Grasping Ability Score |
| GTs | Grasp types |
| H | Hook grip |
| HB | Hand breadth |
| HL | Hand length |
| IP | Interphalangeal |
| InP | Index pointing/pressing |
| KC | Kinematic chain |
| L | Lightweight |
| LAO | Light abstract objects |
| Lb | Limbitless |
| LIF | Linear Index Function |
| LMICs | Low and medium-income countries |
| LP | Lateral pinch |
| MCP | Metacarpophalangeal |
| P | Platform |
| pGAS | partial GAS |
| PIP | Proximal interphalangeal |
| PLA | Polylactic acid |
| PP | Pulp pinch |
| ROM | Range of motion |
| SG | Spherical grip |
| SHAP | Southampton Hand Assessment Procedure |
| TMC | Trapeziometacarpal |
| TP | Tripod pinch |
| TPU | Thermoplastic polyurethane |
| YCB | Yale-CMU-Berkeley |
References
- Napier, J.R. Hands; Princeton Science Library: Priceton, NJ, USA, 1993; ISBN 9780691025476. [Google Scholar]
- Pérez-González, A.; Llop-Harillo, I. Optimization of the Kinematic Chain of the Thumb for a Hand Prosthesis Based on the Kapandji Opposition Test. In Computer Methods, Imaging and Visualization in Biomechanics and Biomedical Engineering. CMBBE 2019; Springer: Cham, Switzerland, 2020; pp. 271–287. ISBN 978-3-030-43194-5. [Google Scholar]
- Synek, A.; Settles, M.; Stillfried, G. Multi-Body Simulation of a Human Thumb Joint by Sliding Surfaces. Proc. IEEE RAS EMBS Int. Conf. Biomed. Robot. Biomechatron. 2012, 1, 379–384. [Google Scholar] [CrossRef] [Green Version]
- Kapandji, A.I. Physiology of the Joints; Jessica Kingsley Publishers: London, UK, 2019; Volume 1, ISBN 9780443103506. [Google Scholar]
- Kapandji, A. Clinical Opposition and Reposition Test of the Thumb [Cotation Clinique de l’opposition et de La Contre-Opposition Du Pouce]. Ann. Chir. la Main 1986, 5, 67–73. [Google Scholar] [CrossRef] [PubMed]
- Kapandji, A. Physiologie Articulaire. Tome 1, Membre Supérieur; Maloine Publishers: France, Paris, 2005; ISBN 2224026471. [Google Scholar]
- Thompson, D. CMC Joint of the Thumb. Available online: https://ouhsc.edu/bserdac/dthompso/web/namics/firstcmc.htm (accessed on 30 September 2021).
- Manero, A.; Smith, P.; Sparkman, J.; Dombrowski, M.; Courbin, D.; Kester, A.; Womack, I.; Chi, A. Implementation of 3D Printing Technology in the Field of Prosthetics: Past, Present, and Future. Int. J. Environ. Res. Public Health 2019, 16, 1641. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wong, T.H.; Asnaghi, D.; Leung, S.W.W. Mechatronics Enabling Kit for 3D Printed Hand Prosthesis. Proc. Int. Conf. Eng. Des. ICED 2019, 1, 769–778. [Google Scholar] [CrossRef] [Green Version]
- Phillips, B.; Zingalis, G.; Ritter, S.; Mehta, K. A Review of Current Upper-Limb Prostheses for Resource Constrained Settings. In Proceedings of 2015 IEEE global humanitarian technology conference (GHTC), Seattle, WA, USA, 8–11 October 2015; pp. 52–58. [Google Scholar] [CrossRef]
- ten Kate, J.; Smit, G.; Breedveld, P. 3D-Printed Upper Limb Prostheses: A Review. Disabil. Rehabil. Assist. Technol. 2017, 12, 300–314. [Google Scholar] [CrossRef]
- Jones, H.; Dupan, S.; Coutinho, M.; Day, S.; Desmond, D.; Donovan-Hall, M.; Dyson, M.; Ekins-Coward, T.; Kenney, L.; Krasoulis, A.; et al. Co-Creation Facilitates Translational Research on Upper Limb Prosthetics. Prosthesis 2021, 3, 110–118. [Google Scholar] [CrossRef]
- Cuellar, J.S.; Smit, G.; Zadpoor, A.A.; Breedveld, P. Ten Guidelines for the Design of Non-Assembly Mechanisms: The Case of 3D-Printed Prosthetic Hands. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2018, 232, 962–971. [Google Scholar] [CrossRef] [Green Version]
- Controzzi, M.; Cipriani, C.; Carrozza, M. Design of Artificial Hands: A Review. In The Human Hand as an Inspiration for Robot Hand Development.; Balasubramanian, R., Santos, V., Eds.; Springer: Cham, Switzerland, 2014; pp. 219–246. ISBN 978-3-319-03017-3. [Google Scholar]
- Burn, M.B.; Ta, A.; Gogola, G.R. Three-Dimensional Printing of Prosthetic Hands for Children. J. Hand Surg. 2016, 41, e103–e109. [Google Scholar] [CrossRef]
- Tanaka, K.S.; Lightdale-Miric, N. Advances in 3D-Printed Pediatric Prostheses for Upper Extremity Differences. J. Bone Jt. Surg. 2016, 98, 1320–1326. [Google Scholar] [CrossRef]
- Levesque, J.N.; Shah, A.; Ekhtiari, S.; Yan, J.R.; Thornley, P.; Williams, D.S. Three-Dimensional Printing in Orthopaedic Surgery: A Scoping Review. EFORT Open Rev. 2020, 5, 430–441. [Google Scholar] [CrossRef]
- Achilli, G.M.; Valigi, M.C.; Salvietti, G.; Malvezzi, M. Design of Soft Grippers with Modular Actuated Embedded Constraints. Robotics 2020, 9, 105. [Google Scholar] [CrossRef]
- Mohammadi, A.; Lavranos, J.; Zhou, H.; Mutlu, R.; Alici, G.; Tan, Y.; Choong, P.; Oetomo, D. A Practical 3D-Printed Soft Robotic Prosthetic Hand with Multi-Articulating Capabilities. PLoS ONE 2020, 15, e0232766. [Google Scholar] [CrossRef] [PubMed]
- Domalain, M.; Vigouroux, L.; Berton, E. Determination of Passive Moment-Angle Relationships at the Trapeziometacarpal Joint. J. Biomech. Eng. 2010, 132, 071009. [Google Scholar] [CrossRef] [PubMed]
- Chalon, M.; Dietrich, A.; Grebenstein, M. The Thumb of the Anthropomorphic Awiwi Hand: From Concept to Evaluation. Int. J. Hum. Robot. 2014, 11, 1450019. [Google Scholar] [CrossRef]
- Nikafrooz, N.; Leonessa, A. A Single-Actuated, Cable-Driven, and Self-Contained Robotic Hand Designed for Adaptive Grasps. Robotics 2021, 10, 109. [Google Scholar] [CrossRef]
- Chalon, M.; Grebenstein, M.; Wimböck, T.; Hirzinger, G. The Thumb: Guidelines for a Robotic Design. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; Volume 1, pp. 5886–5893. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Fan, S.; Liu, H. An Anthropomorphic Design Guideline for the Thumb of the Dexterous Hand. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, ICMA 2012, Chengdu, China, 5–8 August 2012; pp. 777–782. [Google Scholar] [CrossRef]
- Wang, H.; Fan, S.; Liu, H. Thumb Configuration and Performance Evaluation for Dexterous Robotic Hand Design. J. Mech. Des. Trans. ASME 2017, 139, 012304. [Google Scholar] [CrossRef]
- Wiste, T.E.; Dalley, S.A.; Atakan Varol, H.; Goldfarb, M. Design of a Multigrasp Transradial Prosthesis. J. Med. Device. 2011, 5, 031009. [Google Scholar] [CrossRef]
- Andrés, F.J.; Pérez-González, A.; Rubert, C.; Fuentes, J.; Sospedra, B. Comparison of Grasping Performance of Tendon and Linkage Transmission Systems in an Electric-Powered Low-Cost Hand Prosthesis. J. Mech. Robot. 2019, 11, 011018. [Google Scholar] [CrossRef]
- Ullman, D.G. The Mechanical Design Process, 4th ed.; McGraw-Hill: New York, NY, USA, 2010; Volume 1, ISBN 9780072975741. [Google Scholar]
- Metcalf, C. Southampton Hand Assessment Procedure (SHAP). Available online: http://www.shap.ecs.soton.ac.uk (accessed on 22 October 2021).
- Van Der Niet Otr, O.; Reinders-Messelink, H.A.; Bongers, R.M.; Bouwsema, H.; Van Der Sluis, C.K. The I-LIMB Hand and the DMC plus Hand Compared: A Case Report. Prosthet. Orthot. Int. 2010, 34, 216–220. [Google Scholar] [CrossRef] [Green Version]
- Dally, C.; Johnson, D.; Canon, M.; Ritter, S.; Mehta, K. Characteristics of a 3D-Printed Prosthetic Hand for Use in Developing Countries. In Proceedings of the 5th IEEE Global Humanitarian Technology Conference, GHTC 2015, Seattle, WA, USA, 8–11 October 2015; pp. 66–70. [Google Scholar] [CrossRef]
- Dalley, S.A.; Bennett, D.A.; Goldfarb, M. Preliminary Functional Assessment of a Multigrasp Myoelectric Prosthesis. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 4172–4175. [Google Scholar] [CrossRef] [Green Version]
- Schweitzer, W. Ripping through the Southampton Hand Assessment Procedure. Available online: https://www.swisswuff.ch/tech/?p=3043 (accessed on 16 September 2021).
- Latour, D.; Passero, T. Assessment of Functionality of Multifunction Prosthetic Hands. J. Prosthetics Orthot. 2019, 31, 165–166. [Google Scholar] [CrossRef]
- Andrés-Esperanza, J.; Iserte-Vilar, J.L.; Llop-Harillo, I.; Pérez-González, A. Affordable 3D-Printed Tendon Prosthetic Hands: Expectations and Benchmarking Questioned. Eng. Sci. Technol. Int. J. 2021, 31, 101053. [Google Scholar] [CrossRef]
- Llop-Harillo, I.; Pérez-González, A.; Starke, J.; Asfour, T. The Anthropomorphic Hand Assessment Protocol (AHAP). Rob. Auton. Syst. 2019, 121, 103259. [Google Scholar] [CrossRef]
- Gibbard, J. Open Hand Project: Downloads. Available online: http://www.openhandproject.org/downloads.php (accessed on 1 September 2021).
- Limbitless Solutions. Available online: https://limbitless-solutions.org/ (accessed on 1 June 2021).
- UCF Armory; Enabling the future Limbitless Arm. Available online: https://www.thingiverse.com/thing:408641 (accessed on 17 July 2021).
- Steve Wood The Flexy Hand and Flexy Hand 2. Available online: http://enablingthefuture.org/upper-limb-prosthetics/the-flexy-hand/ (accessed on 23 November 2021).
- Llop-Harillo, I.; Pérez-González, A. System for the Experimental Evaluation of Anthropomorphic Hands. Application to a New 3D-Printed Prosthetic Hand Prototype. Int. Biomech. 2017, 4, 50–59. [Google Scholar] [CrossRef] [Green Version]
- Llop-Harillo, I.; Pérez-González, A.; Andrés-Esperanza, J. Grasping Ability and Motion Synergies in Affordable Tendon-Driven Prosthetic Hands Controlled by Able-Bodied Subjects. Front. Neurorobot. 2020, 14, 57. [Google Scholar] [CrossRef] [PubMed]
- Segil, J.L.; Huddle, S.A.; Weir, R.F. Functional Assessment of a Myoelectric Postural Controller and Multi-Functional Prosthetic Hand by Persons With Trans-Radial Limb Loss. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 618–627. [Google Scholar] [CrossRef] [PubMed]
- Kyberd, P.J. The Influence of Control Format and Hand Design in Single Axis Myoelectric Hands: Assessment of Functionality of Prosthetic Hands Using the Southampton Hand Assessment Procedure. Prosthet. Orthot. Int. 2011, 35, 285–293. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vasluian, E.; Bongers, R.M.; Reinders-Messelink, H.A.; Burgerhof, J.G.M.; Dijkstra, P.U.; Sluis, C. Learning Effects of Repetitive Administration of the Southampton Hand Assessment Procedure in Novice Prosthetic Users. J. Rehabil. Med. 2014, 46, 788–797. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bouwsema, H.; van der Sluis, C.K.; Bongers, R.M. Changes in Performance over Time While Learning to Use a Myoelectric Prosthesis. J. Neuroeng. Rehabil. 2014, 11, 16. [Google Scholar] [CrossRef] [Green Version]
- Fougner, A.L.; Stavdahl, Ø.; Kyberd, P.J. System Training and Assessment in Simultaneous Proportional Myoelectric Prosthesis Control. J. Neuroeng. Rehabil. 2014, 11, 75. [Google Scholar] [CrossRef] [Green Version]
- Smit, G.; Plettenburg, D.H.; Van Der Helm, F.C.T. The Lightweight Delft Cylinder Hand: First Multi-Articulating Hand That Meets the Basic User Requirements. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 431–440. [Google Scholar] [CrossRef]
- Huinink, L.H.B.; Bouwsema, H.; Plettenburg, D.H.; van der Sluis, C.K.; Bongers, R.M. Learning to Use a Body-Powered Prosthesis: Changes in Functionality and Kinematics. J. Neuroeng. Rehabil. 2016, 13, 90. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kyberd, P.J. Assessment of Functionality of Multifunction Prosthetic Hands. J. Prosthetics Orthot. 2017, 29, 103–111. [Google Scholar] [CrossRef]
- Kuroiwa, T.; Nimura, A.; Suzuki, S.; Sasaki, T.; Okawa, A.; Fujita, K. Measurement of Thumb Pronation and Palmar Abduction Angles with a Small Motion Sensor: A Comparison with Kapandji Scores. J. Hand Surg. Eur. Vol. 2019, 44, 728–733. [Google Scholar] [CrossRef] [PubMed]
- Mathiowetz, V.; Weber, K.; Volland, G.; Kashman, N. Reliability and Validity of Grip and Pinch Strength Evaluations. J. Hand Surg. Am. 1984, 9, 222–226. [Google Scholar] [CrossRef] [PubMed]
- Mehmet, H.; Yang, A.W.H.; Robinson, S.R. Measurement of Hand Grip Strength in the Elderly: A Scoping Review with Recommendations. J. Bodyw. Mov. Ther. 2020, 24, 235–243. [Google Scholar] [CrossRef] [PubMed]
- Light, C.M. An Intelligent Hand Prosthesis and Evaluation of Pathological and Prosthetic Hand Function. Ph.D. Thesis, University of Southampton, Southampton, UK, 2000. [Google Scholar]
- Light, C.M.; Chappell, P.H.; Kyberd, P.J. Establishing a Standardized Clinical Assessment Tool of Pathologic and Prosthetic Hand Function: Normative Data, Reliability, and Validity. Arch. Phys. Med. Rehabil. 2002, 83, 776–783. [Google Scholar] [CrossRef] [Green Version]
- Burgerhof, J.G.M.; Vasluian, E.; Dijkstra, P.U.; Bongers, R.M.; van der Sluis, C.K. The Southampton Hand Assessment Procedure Revisited: A Transparent Linear Scoring System, Applied to Data of Experienced Prosthetic Users. J. Hand Ther. 2017, 30, 49–57. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hand | Dextrus | Lb-0, & Lb-45 | IMMA |
|---|---|---|---|
| Kinematic architecture | Underactuated (15 DoF > 5 DoC) | Underactuated (14 DoF > 5 DoC) | Underactuated (15 DoF > 6 DoC) |
| - Number of joints * | 3f, 3th | 3f, 2th | 3f, 3th |
| - Long finger joints | DIP, PIP, MCP | DIP, PIP, MCP | DIP, PIP, MCP |
| - Thumb joints | IP, MCP, CMC | IP, MCP | IP, MCP, CMC |
| Materials (% infill) | Ninjaflex® (35%) | PLA (25%)/Ninjaflex® (joints, 25%) | PLA SOFT-Flexible (body palm, phalanges)/Ninjaflex® (joints, 25%)/FilaFlex® (finger pulps, inner palm) |
| Overall size (HB/HL, mm) | 87/185 | 89/200 | 80/184.4 |
| Weight (g) w/o actuators | 131 | 144.5 | 131.5 |
| License | CC BY-SA 4.0 | CC BY-NC 3.0 | CC BY-SA 4.0 |
| Printing time | 28 h | 16 h | 45 h |
| Material cost | $11 | $6 | $10 |
| SHAP Task | SHAP Normative Data [54] | Dextrus | IMMA | Lb-45 | Lb-0 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Mean Time (s) | Time Limit (s) | tmin | Ts | tmin | Ts | tmin | Ts | tmin | Ts | |
| Light sphere | 1.63 | 13.04 | 5.68 | 64.50 | 6.72 | 55.39 | 6.94 | 53.46 | 6.40 | 58.19 |
| Light tripod | 1.66 | 13.28 | 19.40 | 0 | 15.31 | 0 | 23.47 | 0 | 13.42 | 0 |
| Light power | 1.77 | 14.16 | 9.50 | 37.61 | 7.00 | 57.79 | 13.47 | 5.57 | 6.19 | 64.33 |
| Light lateral | 1.77 | 14.16 | 23.37 | 0 | 13.72 | 3.55 | 29.94 | 0 | 22.31 | 0 |
| Light tip | 1.59 | 12.72 | 13.60 | 0 | 10.16 | 23.00 | 15.37 | 0 | 10.10 | 23.54 |
| Light extension | 1.78 | 14.24 | 10.69 | 28.49 | 9.63 | 37.00 | 9.72 | 36.28 | 9.10 | 41.25 |
| % | Dextrus | IMMA | Lb-45 | Lb-0 |
|---|---|---|---|---|
| H | 83 | 75 | 75 | 81 |
| DVG | 47 | 42 | 58 | 50 |
| IP | 100 | 83 | 100 | 100 |
| P | 100 | 100 | 0 | 0 |
| SG (spherical) | 36 | 47 | 28 | 39 |
| TP (tripod) | 67 | 72 | 53 | 61 |
| CG (power) | 36 | 53 | 44 | 22 |
| LP (lateral) | 31 | 78 | 78 | 67 |
| PP (tip) | 17 | 36 | 8 | 44 |
| EG (extension) | 8 | 25 | 33 | 8 |
| Grasping | 58 | 78 | 62 | 58 |
| Maintaining | 29 | 32 | 34 | 37 |
| GAS | 44 | 56 | 48 | 48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrés-Esperanza, J.; Iserte-Vilar, J.L.; Llop-Harillo, I.; Pérez-González, A. Effect of the Thumb Orientation and Actuation on the Functionality and Performance of Affordable Prosthetic Hands: Obtaining Design Criteria. Biomimetics 2022, 7, 233. https://doi.org/10.3390/biomimetics7040233
Andrés-Esperanza J, Iserte-Vilar JL, Llop-Harillo I, Pérez-González A. Effect of the Thumb Orientation and Actuation on the Functionality and Performance of Affordable Prosthetic Hands: Obtaining Design Criteria. Biomimetics. 2022; 7(4):233. https://doi.org/10.3390/biomimetics7040233
Chicago/Turabian StyleAndrés-Esperanza, Javier, Jose L. Iserte-Vilar, Immaculada Llop-Harillo, and Antonio Pérez-González. 2022. "Effect of the Thumb Orientation and Actuation on the Functionality and Performance of Affordable Prosthetic Hands: Obtaining Design Criteria" Biomimetics 7, no. 4: 233. https://doi.org/10.3390/biomimetics7040233