
An Enhanced Photogrammetric Approach for the Underwater Surveying of the Posidonia Meadow Structure in the Spiaggia Nera Area of Maratea



Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Measurement Unit |
|---|---|
| Meadow continuity | 1 = continuous, 2 = discontinuous |
| % dead matte coverage | % |
| % alive PO coverage | % |
| % Caluerpa racemosa | % |
| % Cymodocea nodosa | % |
| Substrate | 1 = rocks, 2 = sand, 3 = matte |
| Disturbance factors | 1 = yes; 2 = none |
| Meadow composition | 1 = pure; 2 = mixed |
| Non-native algae | 1= Caluerpa racemosa; 2= Caluerpa taxifolia; 3 = both |
State of the Art
Underwater Image Restoration
2. Materials and Methods
2.1. Study Area
2.2. Instrumentation
2.3. Survey Methodology
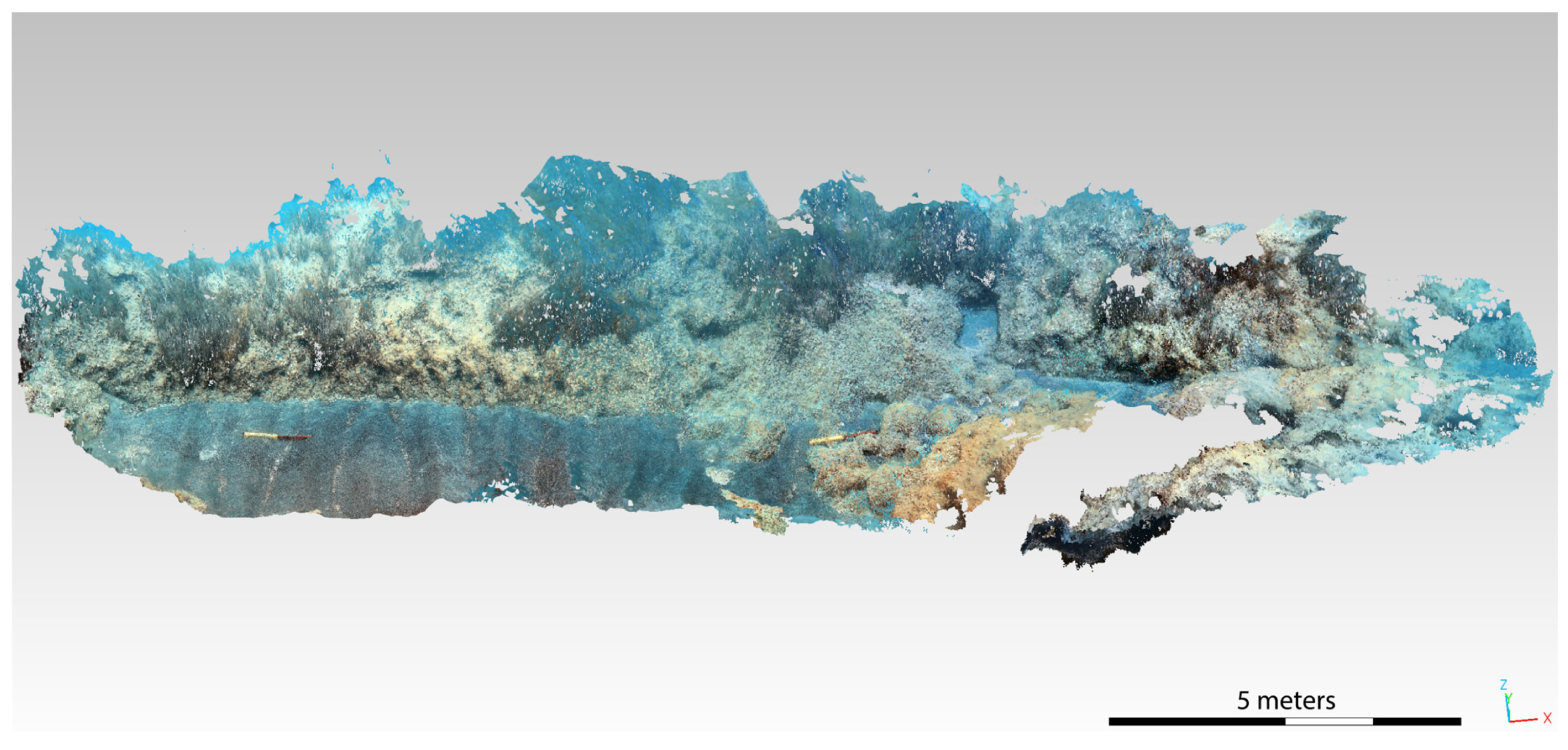
2.4. Photogrammetric Workflow
2.5. Algorithms for Image Enhancements
3. Results
3.1. Initial Image Processing
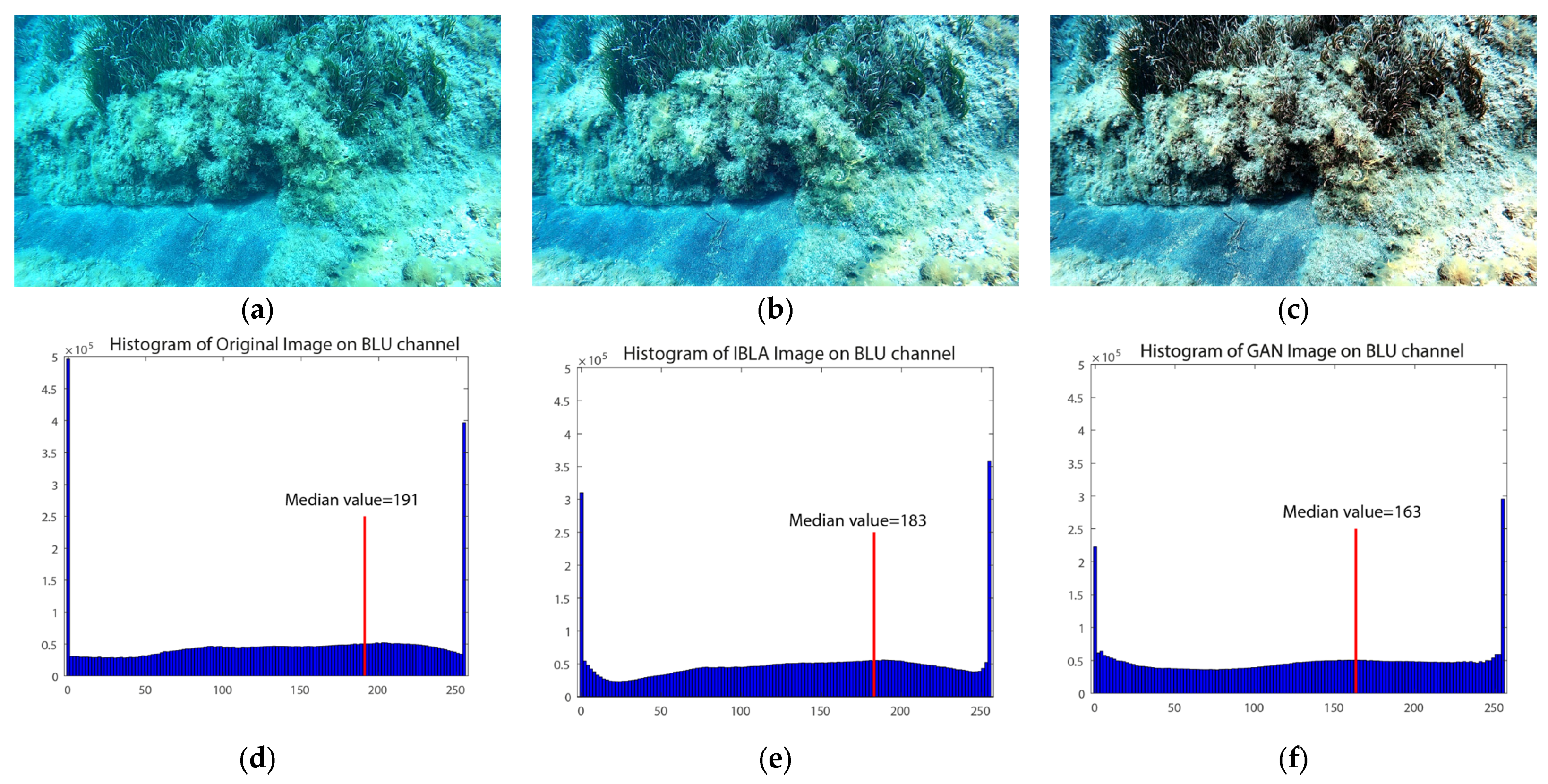
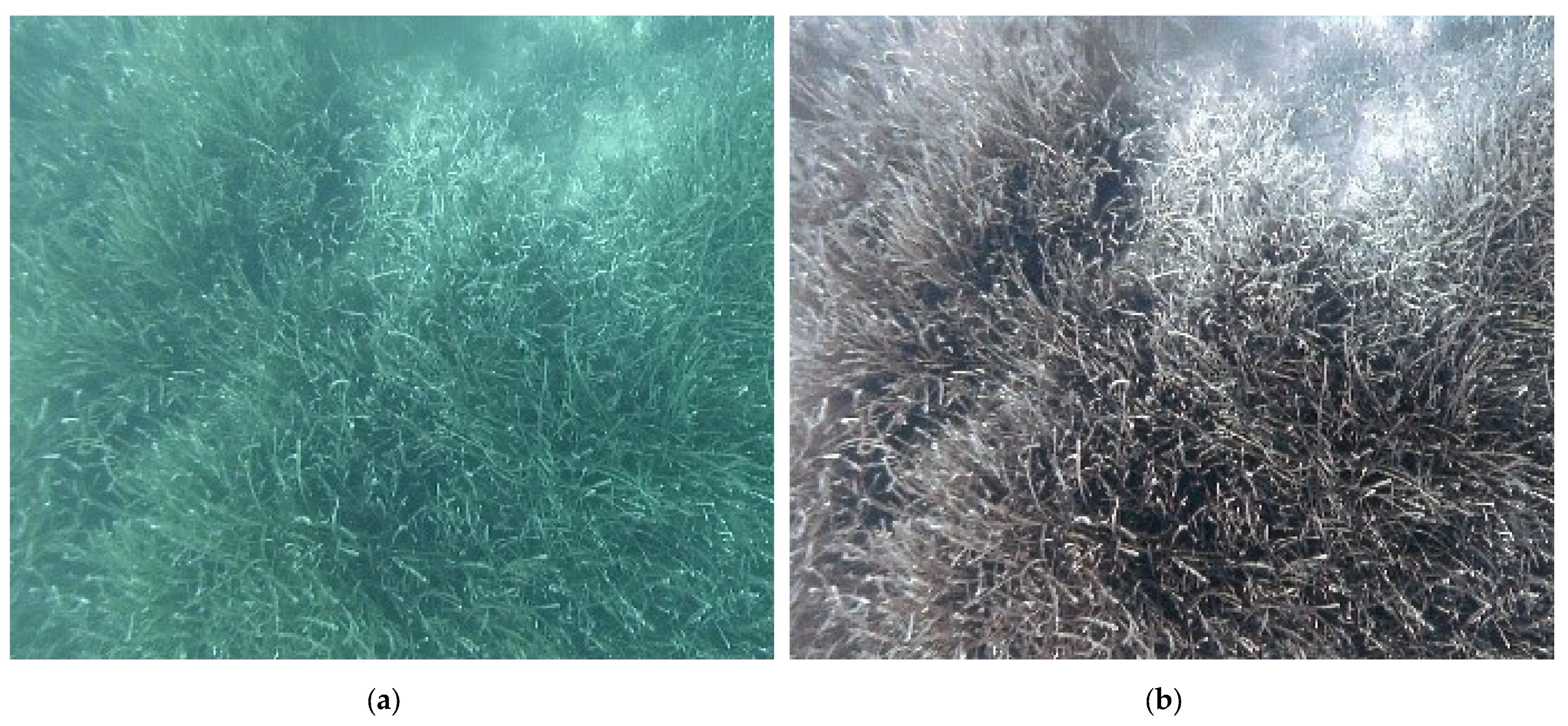
3.2. Analysis of Image Enhancement Results
3.3. Deep Learning Images Enhancements and Characterization Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Monnier, B.; Pergent, G.; Mateo, M.Á.; Clabaut, P.; Pergent-Martini, C. Quantification of blue carbon stocks associated with Posidonia oceanica seagrass meadows in Corsica (NW Mediterranean). Sci. Total Environ. 2022, 838, 155864. [Google Scholar] [CrossRef] [PubMed]
- Serrano, O.; Serrano, E.; Inostroza, K.; Lavery, P.S.; Mateo, M.A.; Ballesteros, E. Seagrass meadows provide 3D habitat for reef fish. Front. Mar. Sci. 2017, 4, 54. [Google Scholar]
- Montefalcone, M.; Rovere, A.; Parravicini, V.; Albertelli, G.; Morri, C.; Bianchi, C.N. Reprint of “Evaluating change in seagrass meadows: A time-framed comparison of Side Scan Sonar maps”. Aquat. Bot. 2014, 115, 36–44. [Google Scholar] [CrossRef]
- Penna, M.; Bacci, T.; Rende, F.; Tomasello, A.; Calvo, S. Scheda Metodologica Posidonia oceanica (L.) Delile, Descrittore 1 Biodiversità (Dlgs 190/10), Elemento di Qualità Biologica Angiosperme (Dlgs 152/06); ISPRA: Rome, Italy, 2020. [Google Scholar]
- Pergent-Martini, C.; Leoni, V.; Pasqualini, V.; Ardizzone, G.D.; Balestri, E.; Bedini, R.; Belluscio, A.; Belsher, T.; Borg, J.; Velimirov, B.; et al. Descriptors of Posidonia oceanica meadows: Use and application. Ecol. Indic. 2005, 5, 213–230. [Google Scholar] [CrossRef]
- Bacci, T.; La Porta, B.; Maggi, C.; Nonnis, O.; Paganelli, D.; Sante Rende, F.; Boccalaro, F.; Bovina, G.; Cantasano, N.; Polifrone, M.; et al. Conservazione e Gestione della Naturalità negli Ecosistemi Marino-Costieri. Il Trapianto delle Praterie di Posidonia oceanica; ISPRA: Rome, Italy, 2014. [Google Scholar]
- Chen, X.; Zhang, P.; Quan, L.; Yi, C.; Lu, C. Underwater image enhancement based on deep learning and image formation model. arXiv 2021, arXiv:2101.00991. [Google Scholar]
- Russo, F.; Del Pizzo, S.; Di Ciaccio, F.; Troisi, S. Monitoring the Posidonia Meadows structure through underwater photogrammetry: A case study. In Proceedings of the 2022 IEEE International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea), Milazzo, Italy, 3–5 October 2022; pp. 215–219. [Google Scholar]
- Peng, Y.T.; Cosman, P.C. Underwater image restoration based on image blurriness and light absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar]
- Calvo, S.; Calvo, R.; Luzzu, F.; Raimondi, V.; Assenzo, M.; Cassetti, F.P.; Tomasello, A. Performance assessment of Posidonia oceanica (L.) Delile restoration experiment on dead matte twelve years after planting—Structural and functional meadow features. Water 2021, 13, 724. [Google Scholar]
- Apostolaki, E.T.; Caviglia, L.; Santinelli, V.; Cundy, A.B.; Tramati, C.D.; Mazzola, A.; Vizzini, S. The importance of dead seagrass (Posidonia oceanica) matte as a biogeochemical sink. Front. Mar. Sci. 2022, 9, 861998. [Google Scholar] [CrossRef]
- Meinesz, A.; Laurent, R. Cartographie et état de la limite inferieure de l’herbier de Posidonia oceanica dans les Alpes-maritimes (France)–Campagne Poseïdon 1976—. Bot. Mar. 1978, 21, 513–526. [Google Scholar] [CrossRef]
- Pergent, G.; Pergent-Martini, C.; Boudouresque, C.F. Utilisation de l’herbier à Posidonia oceanica comme indicateur biologique de la qualité du milieu littoral en Méditerranée: État des connaissances. Mésogée 1995, 54, 3–27. [Google Scholar]
- Hatcher, G.A.; Warrick, J.A.; Ritchie, A.C.; Dailey, E.T.; Zawada, D.G.; Kranenburg, C.; Yates, K.K. Accurate bathymetric maps from underwater digital imagery without ground control. Front. Mar. Sci. 2020, 7, 525. [Google Scholar] [CrossRef]
- Remondino, F.; El-Hakim, S.; Girardi, S.; Rizzi, A.; Benedetti, S.; Gonzo, L. 3d virtual reconstruction and visualization of complex architectures: The 3D-ARCH project. In Proceedings of the 3rd International Workshop, 3D-ARCH 2009, Trento, Italy, 25–28 February 2009. [Google Scholar]
- Rende, S.F.; Bosman, A.; Di Mento, R.; Bruno, F.; Lagudi, A.; Irving, A.D.; Dattola, L.; Giambattista, L.D.; Lanera, P.; Proietti, R.; et al. Ultra-high-resolution mapping of Posidonia oceanica (L.) delile meadows through acoustic, optical data and object-based image classification. J. Mar. Sci. Eng. 2020, 8, 647. [Google Scholar] [CrossRef]
- Jordt-Sedlazeck, A.; Koch, R. Refractive structure-from-motion on underwater images. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 57–64. [Google Scholar]
- McDonald, J.I.; Coupland, G.T.; Kendrick, G.A. Underwater video as a monitoring tool to detect change in seagrass cover. J. Environ. Manag. 2006, 80, 148–155. [Google Scholar] [CrossRef]
- Schultz, S.T.; Bakran-Petricioli, T.; Kruschel, C.; Petricioli, D. Monitoring of posidoniameadows under the ec habitats directive: Vehicular videography can estimate trends in coverage at low cost and high precision. In Proceedings of the 5th Mediterranean Symposium on Marine Vegetation, Portorož, Slovenia, 27–28 October 2014; pp. 161–166. [Google Scholar]
- Rende, S.F.; Irving, A.D.; Bacci, T.; Parlagreco, L.; Bruno, F.; De Filippo, F.; Montefalcone, M.; Penna, M.; Trabucco, B.; Di Mento, R.; et al. Advances in micro-cartography: A two-dimensional photo mosaicing technique for seagrass monitoring. Estuar. Coast. Shelf Sci. 2015, 167, 475–486. [Google Scholar] [CrossRef]
- Burns, J.H.R.; Delparte, D. Comparison of commercial structure-from-motion photogrammety software used for underwater three-dimensional modeling of coral reef environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 127. [Google Scholar] [CrossRef]
- Mizuno, K.; Asada, A.; Matsumoto, Y.; Sugimoto, K.; Fujii, T.; Yamamuro, M.; Fortes, M.D.; Sarceda, M.; Jimenez, L.A. A simple and efficient method for making a high-resolution seagrass map and quantification of dugong feeding trail distribution: A field test at Mayo Bay, Philippines. Ecol. Inform. 2017, 38, 89–94. [Google Scholar] [CrossRef]
- Bryson, M.; Johnson-Roberson, M.; Pizarro, O.; Williams, S. Automated registration for multi-year robotic surveys of marine benthic habitats. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3344–3349. [Google Scholar]
- Bonin-Font, F.; Campos, M.M.; Codina, G.O. Towards visual detection, mapping and quantification of Posidonia oceanica using a lightweight AUV. IFAC-PapersOnLine 2016, 49, 500–505. [Google Scholar] [CrossRef]
- Drap, P.; Seinturier, J.; Hijazi, B.; Merad, D.; Boi, J.M.; Chemisky, B.; Seguin, E.; Long, L. The ROV 3D Project: Deep-sea underwater survey using photogrammetry: Applications for underwater archaeology. J. Comput. Cult. Herit. (JOCCH) 2015, 8, 1–24. [Google Scholar] [CrossRef]
- Campagnaro, F.; Steinmetz, F.; Renner, B.-C. Survey on Low-Cost Underwater Sensor Networks: From Niche Applications to Everyday Use. J. Mar. Sci. Eng. 2023, 11, 125. [Google Scholar] [CrossRef]
- McCarthy, J.K.; Benjamin, J.; Winton, T.; Van Duivenvoorde, W. 3D Recording and Interpretation for Maritime Archaeology; Springer Nature: Berlin/Heidelberg, Germany, 2019; p. 237. [Google Scholar]
- Menna, F.; Nocerino, E.; Drap, P.; Remondino, F.; Murtiyoso, A.; Grussenmeyer, P.; Börlin, N. Improving underwater accuracy by empirical weighting of image observations. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 699–705. [Google Scholar] [CrossRef]
- Figueira, W.; Ferrari, R.; Weatherby, E.; Porter, A.; Hawes, S.; Byrne, M. Accuracy and precision of habitat structural complexity metrics derived from underwater photogrammetry. Remote Sens. 2015, 7, 16883–16900. [Google Scholar] [CrossRef]
- Storlazzi, C.D.; Dartnell, P.; Hatcher, G.A.; Gibbs, A.E. End of the chain Rugosity and fine-scale bathymetry from existing underwater digital imagery using structure-from-motion (SfM) technology. Coral Reefs 2016, 35, 889–894. [Google Scholar] [CrossRef]
- Nocerino, E.; Neyer, F.; Gruen, A.; Troyer, M.; Menna, F.; Brooks, A.; Capra, A.; Castagnetti, C.; Rossi, P. Comparison of diver-operated underwater photogrammetric systems for coral reef monitoring. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 143–150. [Google Scholar] [CrossRef]
- Mangeruga, M.; Cozza, M.; Bruno, F. Evaluation of underwater image enhancement algorithms under different environmental conditions. J. Mar. Sci. Eng. 2018, 6, 10. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, J.; Li, D.; Fu, B.; Lou, X.; Wu, Z. Reconstruction of large complex sand-wave bathymetry with adaptive partitioning combining satellite imagery and sparse multi-beam data. J. Oceanol. Limnol. 2022, 40, 1924–1936. [Google Scholar] [CrossRef]
- Marre, G.; Deter, J.; Holon, F.; Boissery, P.; Luque, S. Fine-scale automatic mapping of living Posidonia oceanica seagrass beds with underwater photogrammetry. Mar. Ecol. Prog. Ser. 2020, 643, 63–74. [Google Scholar] [CrossRef]
- Oakley, J.P.; Satherley, B.L. Improving image quality in poor visibility conditions using a physical model for contrast degradation. IEEE Trans. Image Process. 1998, 7, 167–179. [Google Scholar] [CrossRef]
- Li, Y.; Lu, H.; Li, K.C.; Kim, H.; Serikawa, S. Non-uniform de-scattering and de-blurring of underwater images. Mob. Netw. Appl. 2018, 23, 352–362. [Google Scholar] [CrossRef]
- Dalgleish, F.; Ouyang, B.; Vuorenkoski, A. A unified framework for image performance enhancement of extended range laser seabed survey sensors. In Proceedings of the 2013 IEEE International Underwater Technology Symposium (UT), Tokyo, Japan, 5–8 March 2013; pp. 1–7. [Google Scholar]
- Singh, R.; Biswas, M. Adaptive histogram equalization based fusion technique for hazy underwater image enhancement. In Proceedings of the 2016 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Chennai, India, 15–17 December 2016; pp. 1–5. [Google Scholar]
- Kaeli, J.W.; Singh, H.; Murphy, C.; Kunz, C. Improving color correction for underwater image surveys. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–6. [Google Scholar]
- Akkaynak, D.; Treibitz, T. Sea-thru: A method for removing water from underwater images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1682–1691. [Google Scholar]
- Lu, H.; Li, Y.; Zhang, Y.; Chen, M.; Serikawa, S.; Kim, H. Underwater optical image processing: A comprehensive review. Mob. Netw. Appl. 2017, 22, 1204–1211. [Google Scholar] [CrossRef]
- Han, M.; Lyu, Z.; Qiu, T.; Xu, M. A review on intelligence dehazing and color restoration for underwater images. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 1820–1832. [Google Scholar] [CrossRef]
- Li, C.; Guo, J.; Guo, C. Emerging from water: Underwater image color correction based on weakly supervised color transfer. IEEE Signal Process. Lett. 2018, 25, 323–327. [Google Scholar] [CrossRef]
- Skinner, K.A.; Zhang, J.; Olson, E.A.; Johnson-Roberson, M. Uwstereonet: Unsupervised learning for depth estimation and color correction of underwater stereo imagery. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7947–7954. [Google Scholar]
- Luhmann, T.; Robson, S.; Kyle, S.; Boehm, J. Close-range photogrammetry and 3D imaging. In Close-Range Photogrammetry and 3D Imaging; De Gruyter: Berlin, Germany, 2019. [Google Scholar]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef]
- Remondino, F.; Fraser, C. Digital camera calibration methods: Considerations and comparisons. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 266–272. [Google Scholar]
- Chiang, J.Y.; Chen, Y.C. Underwater image enhancement by wavelength compensation and dehazing. IEEE Trans. Image Process. 2011, 21, 1756–1769. [Google Scholar] [CrossRef]
- Wang, Y.; Song, W.; Fortino, G.; Qi, L.Z.; Zhang, W.; Liotta, A. An experimental-based review of image enhancement and image restoration methods for underwater imaging. IEEE Access 2019, 7, 140233–140251. [Google Scholar] [CrossRef]
















| Original Frames | IBLA Frames | CNN Frames | |
|---|---|---|---|
| N° total images | 3384 | 3384 | 3384 |
| N° aligned frames | 3182 | 3230 | 3216 |
| N° sparse cloud points | 335,852 | 335,131 | 356,055 |
| N° dense cloud points | 5,696,743 | 5,543,270 | 5,678,596 |
| N. of Aligned Frames | N. of Dense Point Clouds | |
|---|---|---|
| SN2 | 688 | 39,71,913 |
| SN2_CNN | 688 | 4,444,126 |
| ST7 | 280 | 2,204,910 |
| ST7_CNN | 280 | 2,661,009 |
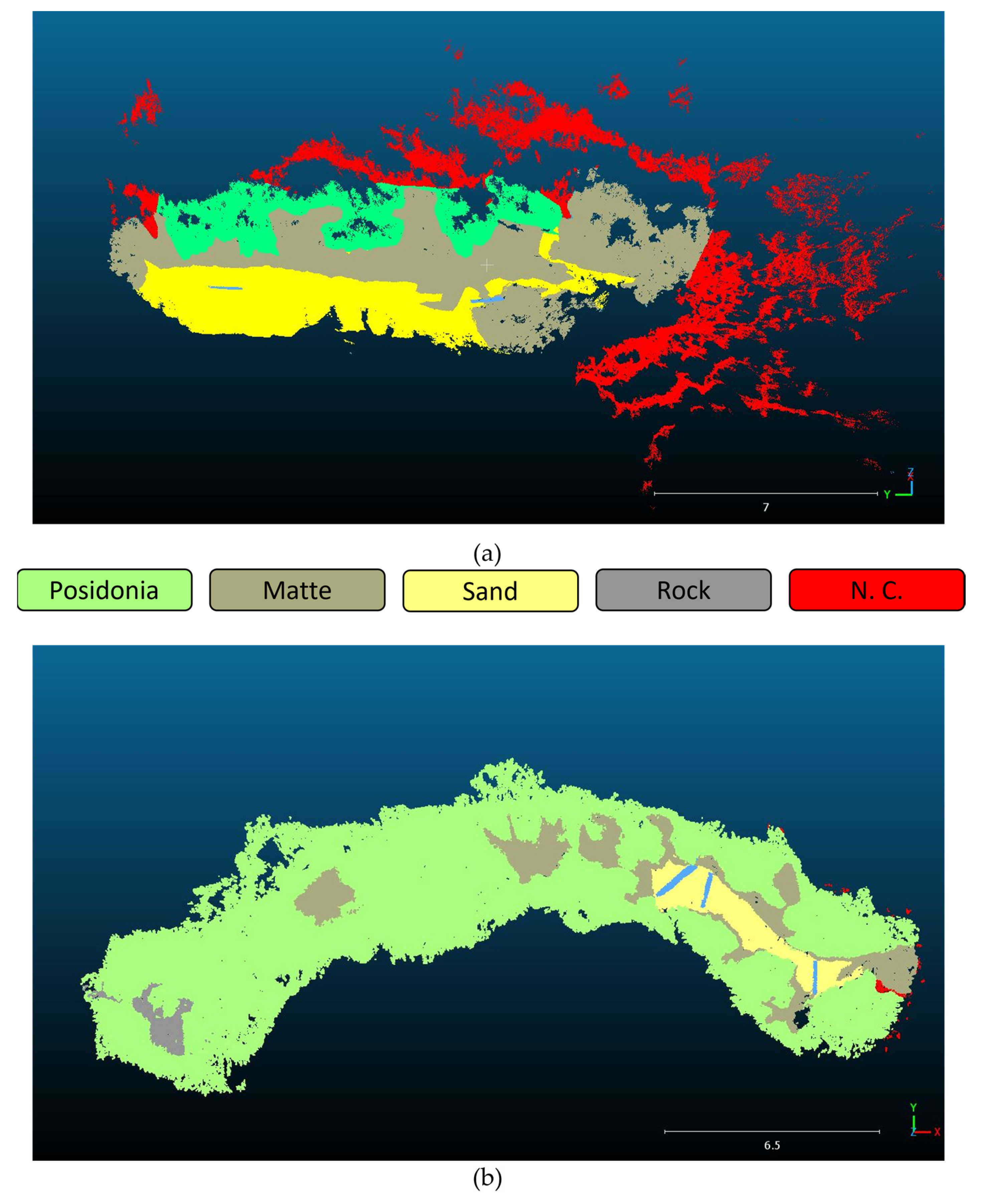
| Transect | Total Area | Posidonia oceanica | Matte | Sand | Rock | Non-Classified | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| [m2] | [m2] | (%) | [m2] | (%) | [m2] | (%) | [m2] | (%) | [m2] | (%) | |
| SN2 | 307.15 | 55.422 | 18 | 110.320 | 36 | 50.217 | 16 | / | / | 90 | 29 |
| ST7 | 415.77 | 351.903 | 85 | 45.469 | 11 | 12.782 | 3 | 5.416 | 1 | 1.23 | 0.3 |
| Transect | Total Area | Posidonia oceanica | Matte | Sand | Rock | Non-Classified | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| [m2] | [m2] | (%) | [m2] | (%) | [m2] | (%) | [m2] | (%) | [m2] | (%) | |
| SN2 | 425.008 | 95.406 | 22 | 181.904 | 43 | 50.217 | 12 | / | / | 99.462 | 23 |
| ST7 | 485.859 | 416.12 | 86 | 32.09 | 7 | 16.69 | 3 | 23 | 4 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Russo, F.; Del Pizzo, S.; Di Ciaccio, F.; Troisi, S. An Enhanced Photogrammetric Approach for the Underwater Surveying of the Posidonia Meadow Structure in the Spiaggia Nera Area of Maratea. J. Imaging 2023, 9, 113. https://doi.org/10.3390/jimaging9060113
Russo F, Del Pizzo S, Di Ciaccio F, Troisi S. An Enhanced Photogrammetric Approach for the Underwater Surveying of the Posidonia Meadow Structure in the Spiaggia Nera Area of Maratea. Journal of Imaging. 2023; 9(6):113. https://doi.org/10.3390/jimaging9060113
Chicago/Turabian StyleRusso, Francesca, Silvio Del Pizzo, Fabiana Di Ciaccio, and Salvatore Troisi. 2023. "An Enhanced Photogrammetric Approach for the Underwater Surveying of the Posidonia Meadow Structure in the Spiaggia Nera Area of Maratea" Journal of Imaging 9, no. 6: 113. https://doi.org/10.3390/jimaging9060113