

An Extended Kalman Filter Design for State-of-Charge Estimation Based on Variational Approach

Abstract
:1. Introduction
2. Mathematical Analysis
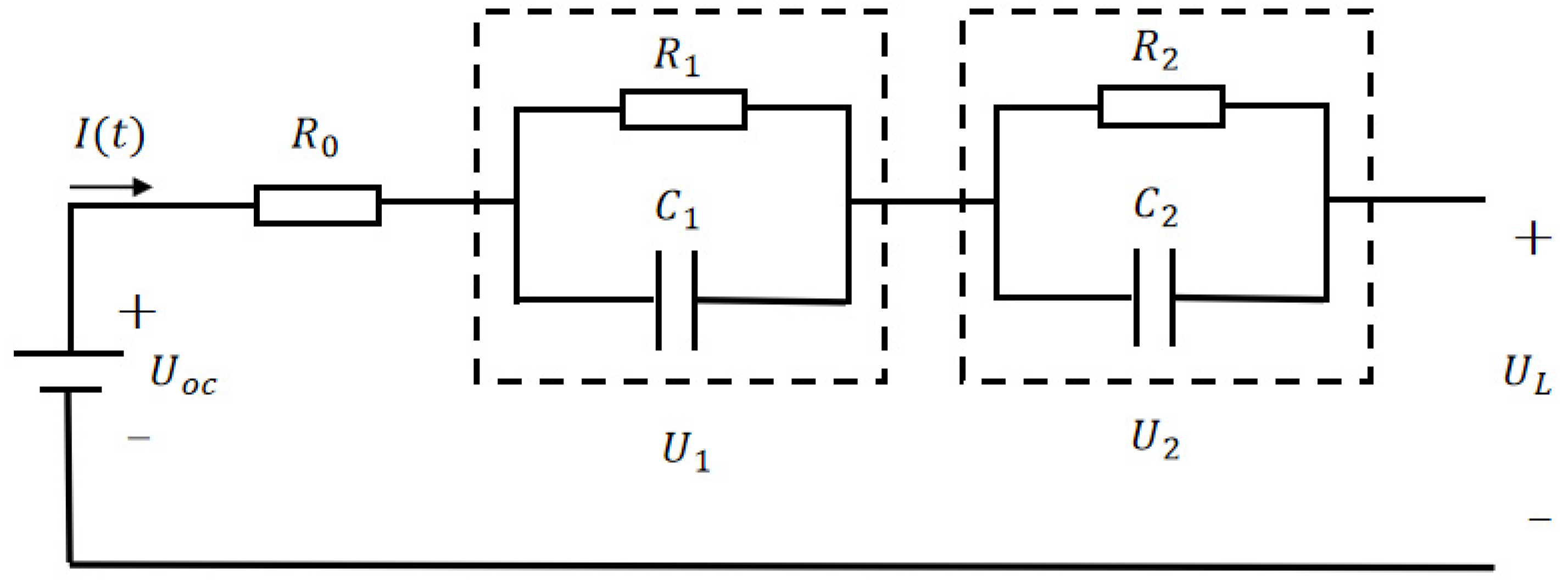
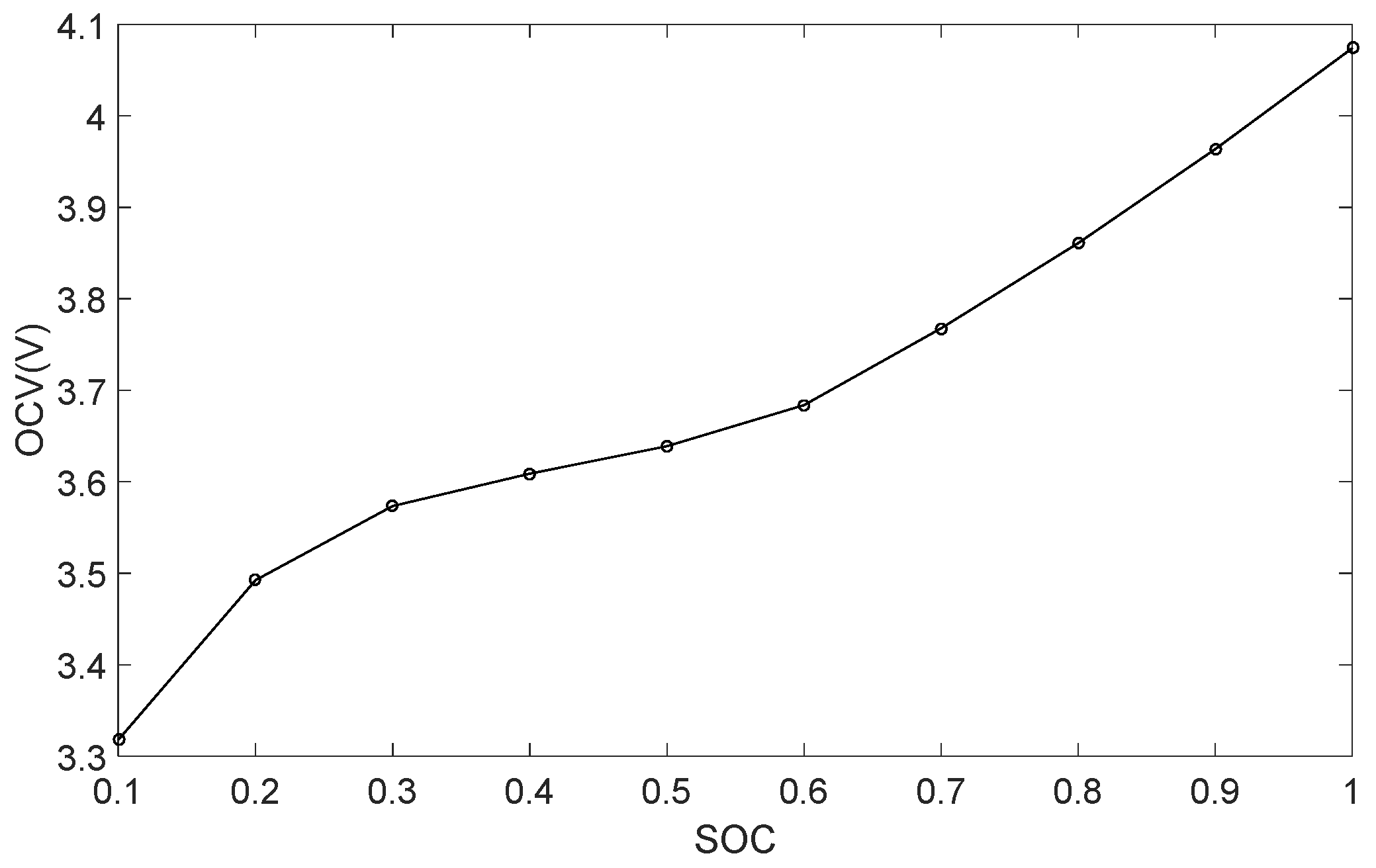
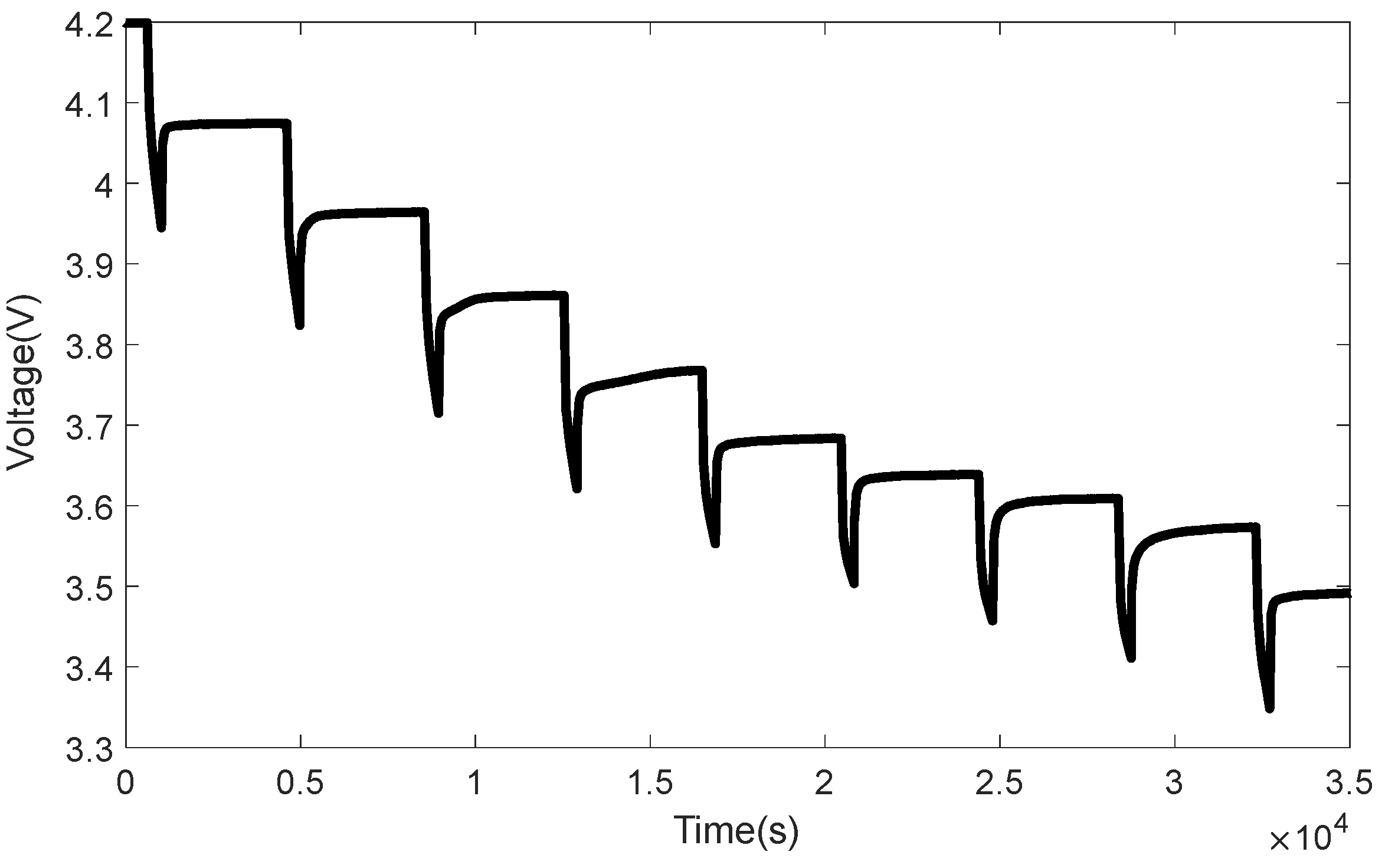
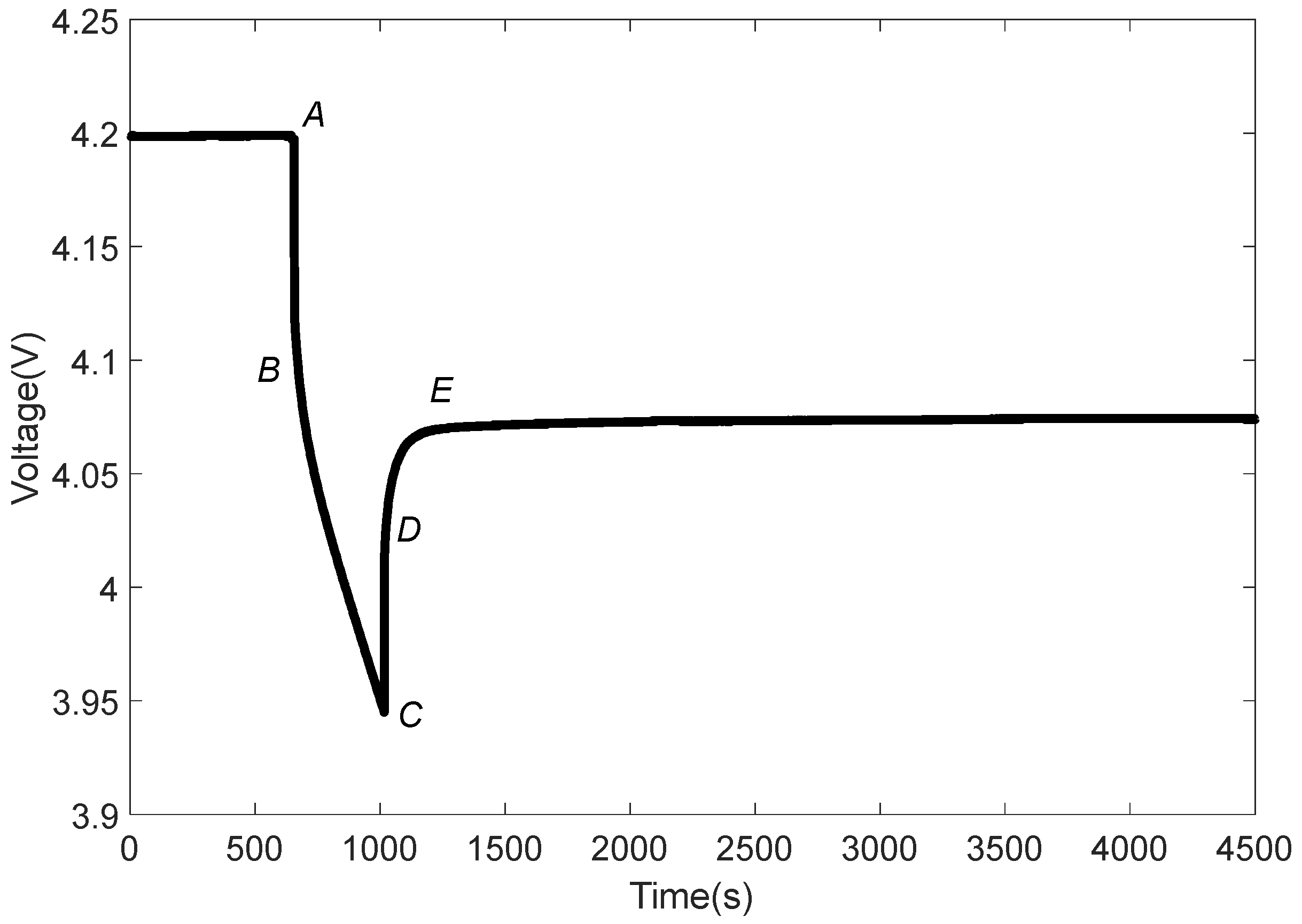
2.1. Battery Modelling
2.2. Extended Kalman Filter
| Algorithm 1 Traditional EKF Algorithm |
| . |
| Step 2: Predicting the one step prior state prediction and variance. |
| Step 3: Computing the filter gain. |
| Step 4: Calculating the one step posterior state estimation and variance |
| Step 5: Repeating Step 2 to Step 4. |
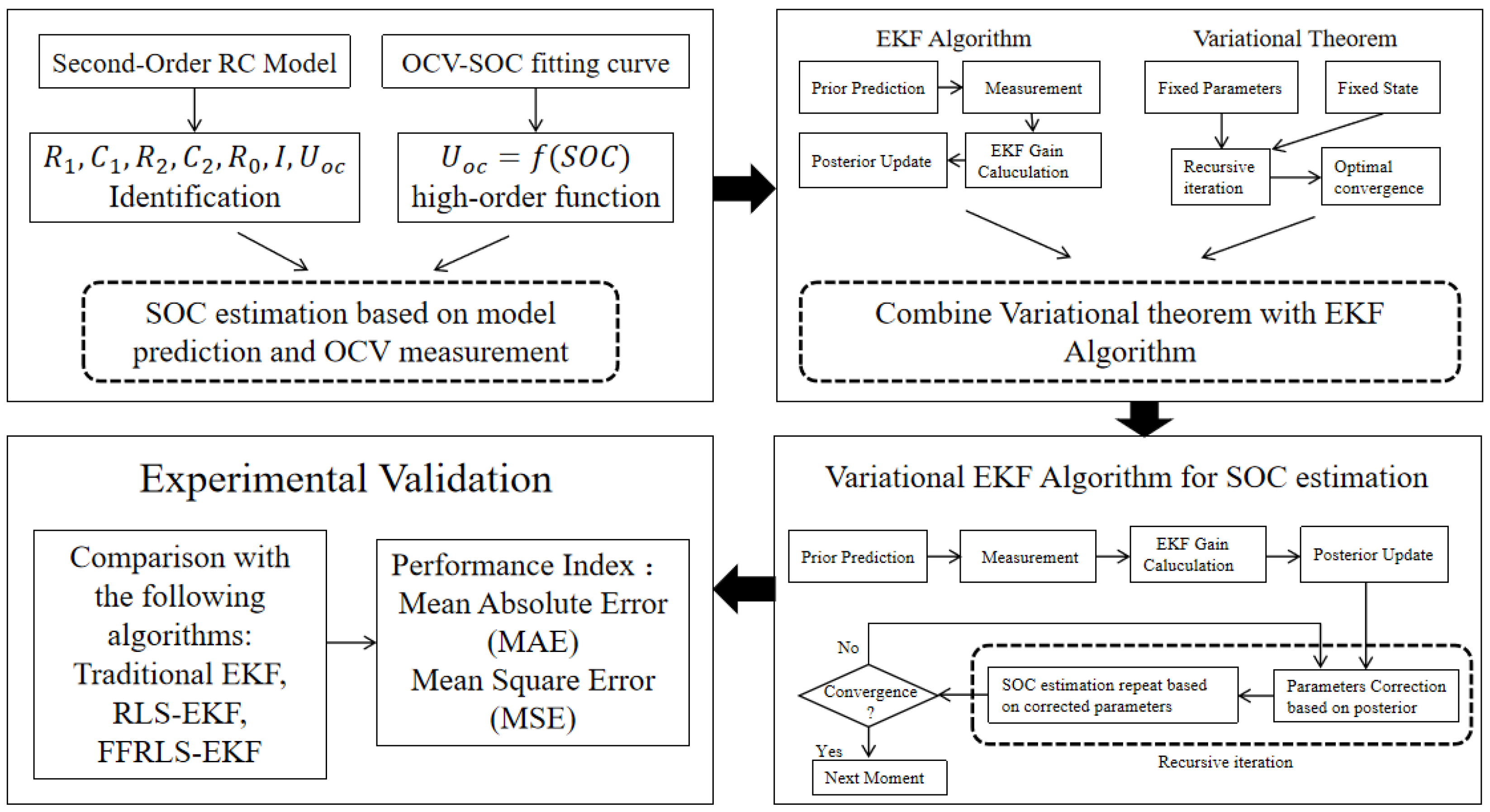
3. SOC Estimation Based on Variational Extended Kalman Filter Algorithm
| Algorithm 2 Variational EKF Algorithm |
| Step 1: Initializing the initial state and the variance . |
| Step 2: Figuring out the one step prior to state prediction and variance , the filter gain , and the posterior state estimation and variance based on traditional EKF algorithm mentioned in Algorithm 1. |
| Step 3: Computing the system parameters , , , based on Equations (13)–(18) with the introduction of the posterior state estimation . |
| Step 4: Comparing the difference between the posterior state estimated by step 2 and step 3; if the difference is small enough, then go to next step; if the difference is large, then send the posterior state estimation in step 3 to step 2, and repeat step 3; |
| Step 5: Replacing moment by moment and repeating step 2–4. |
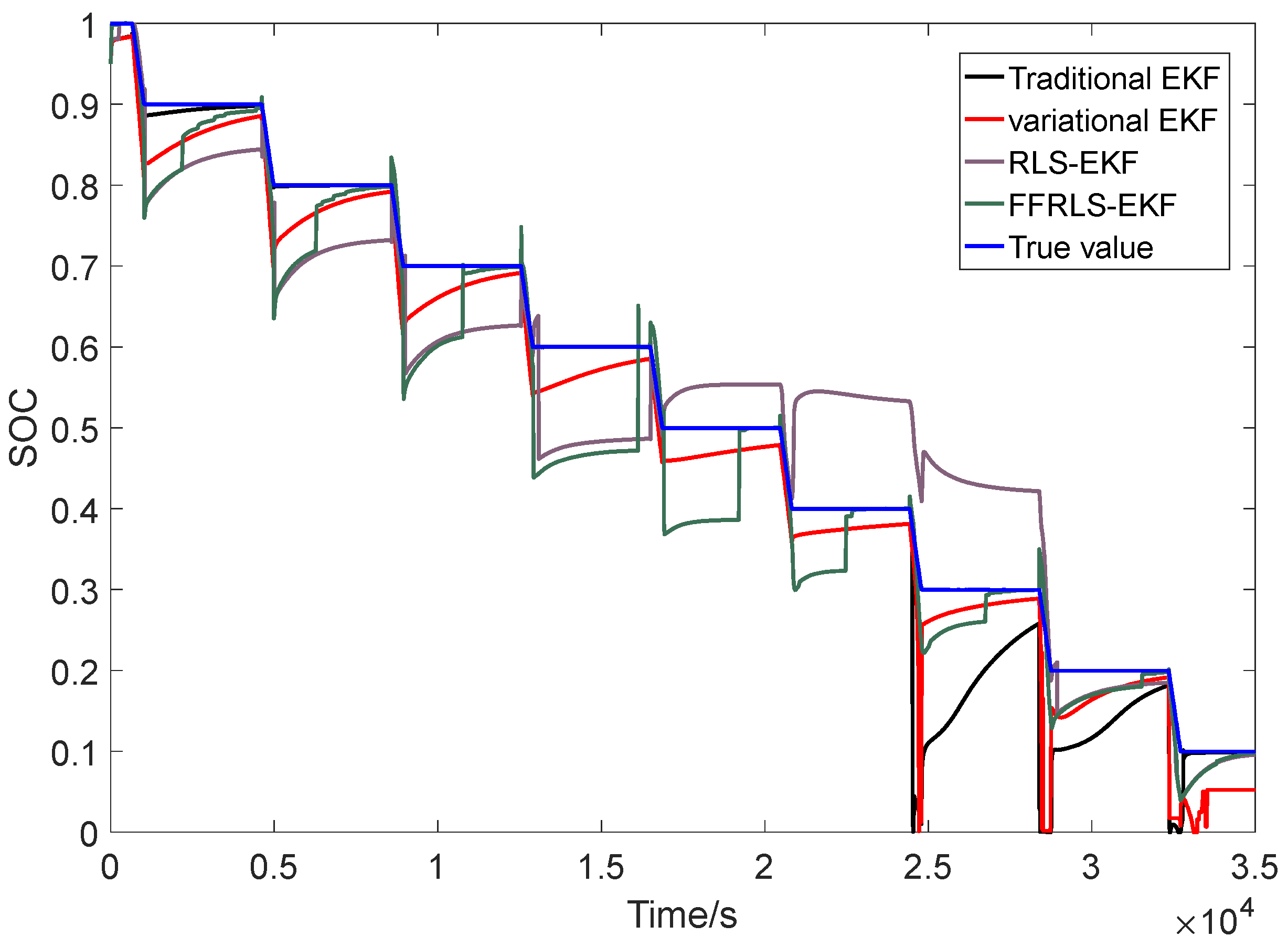
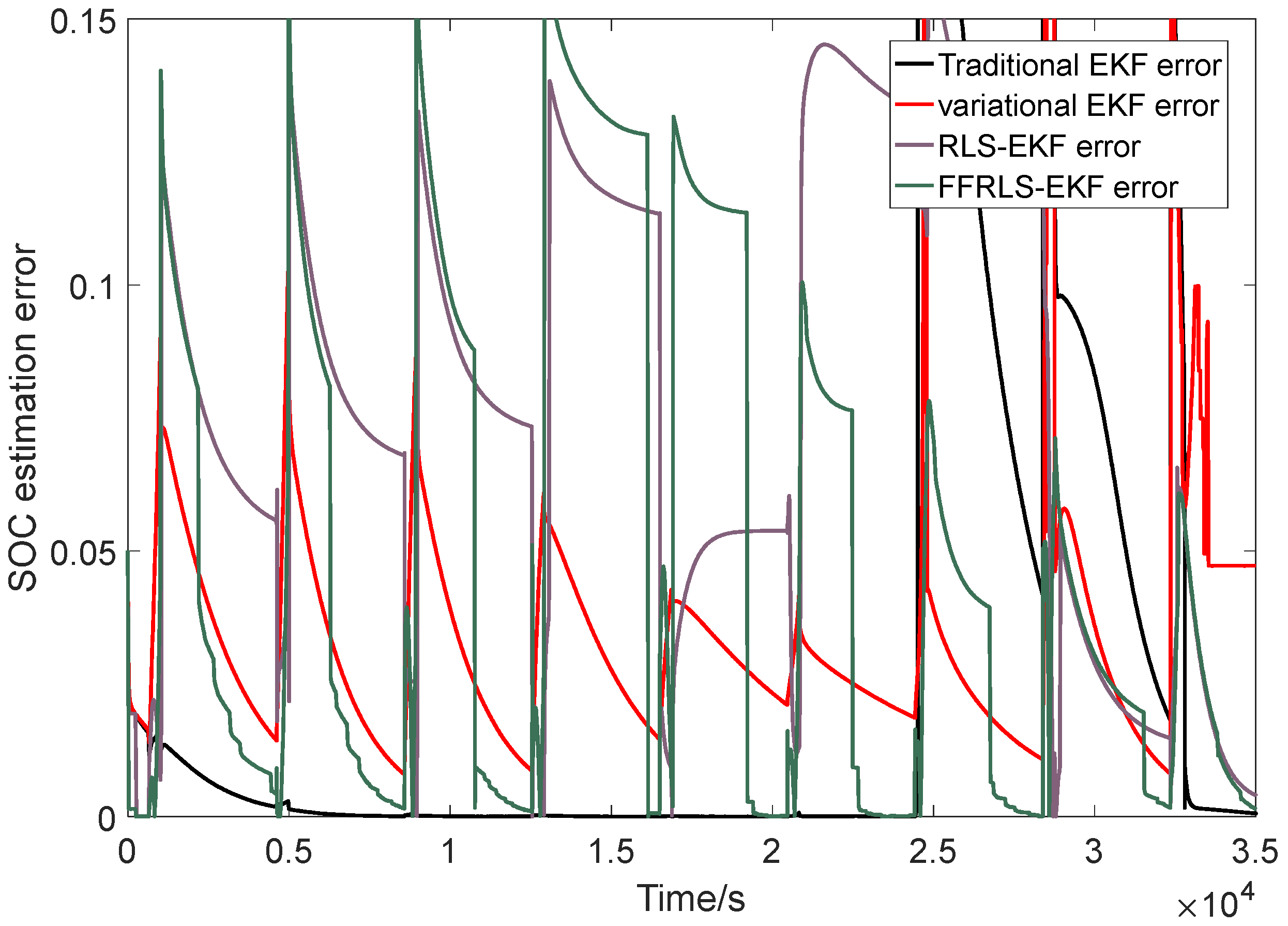
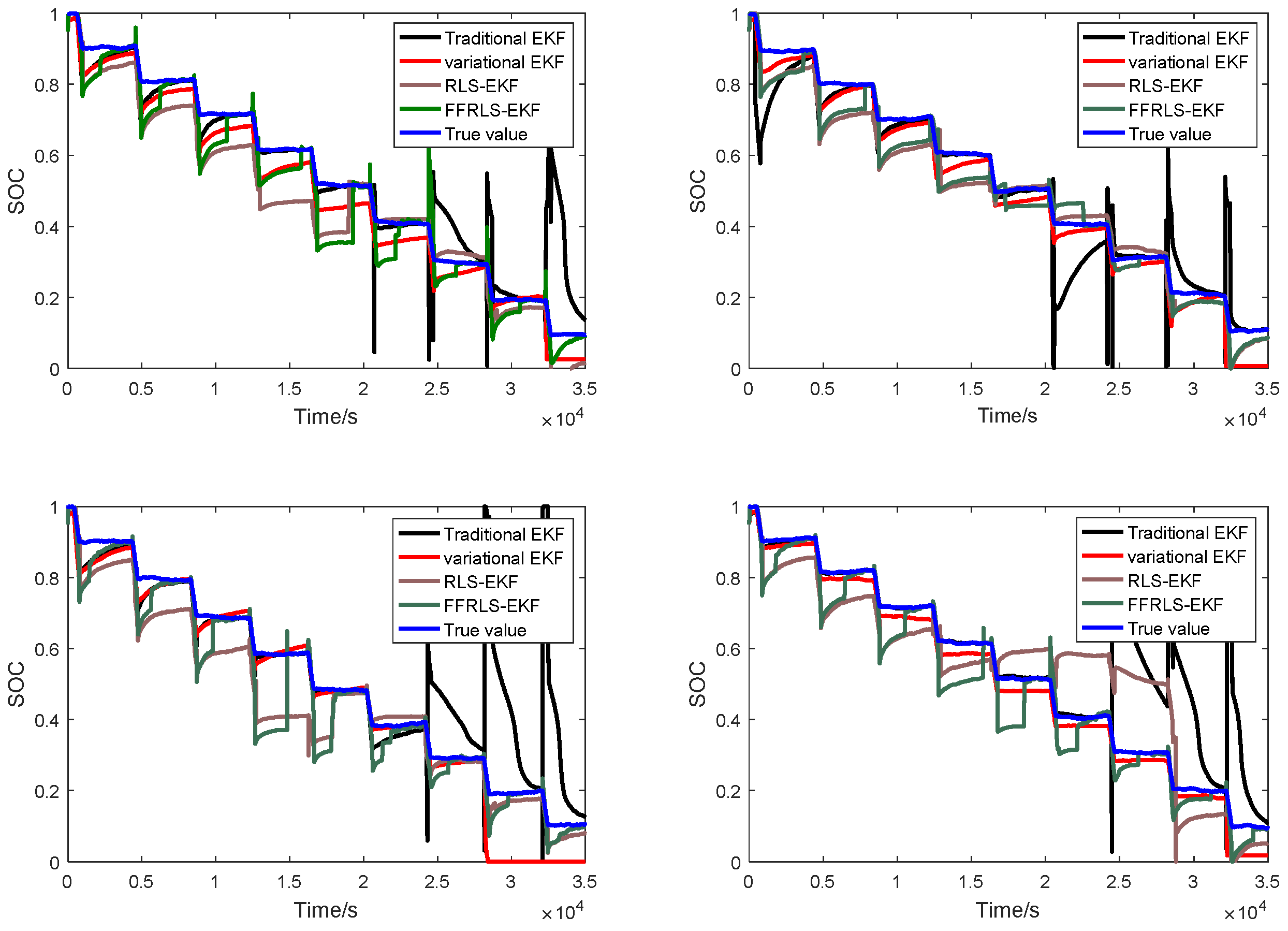
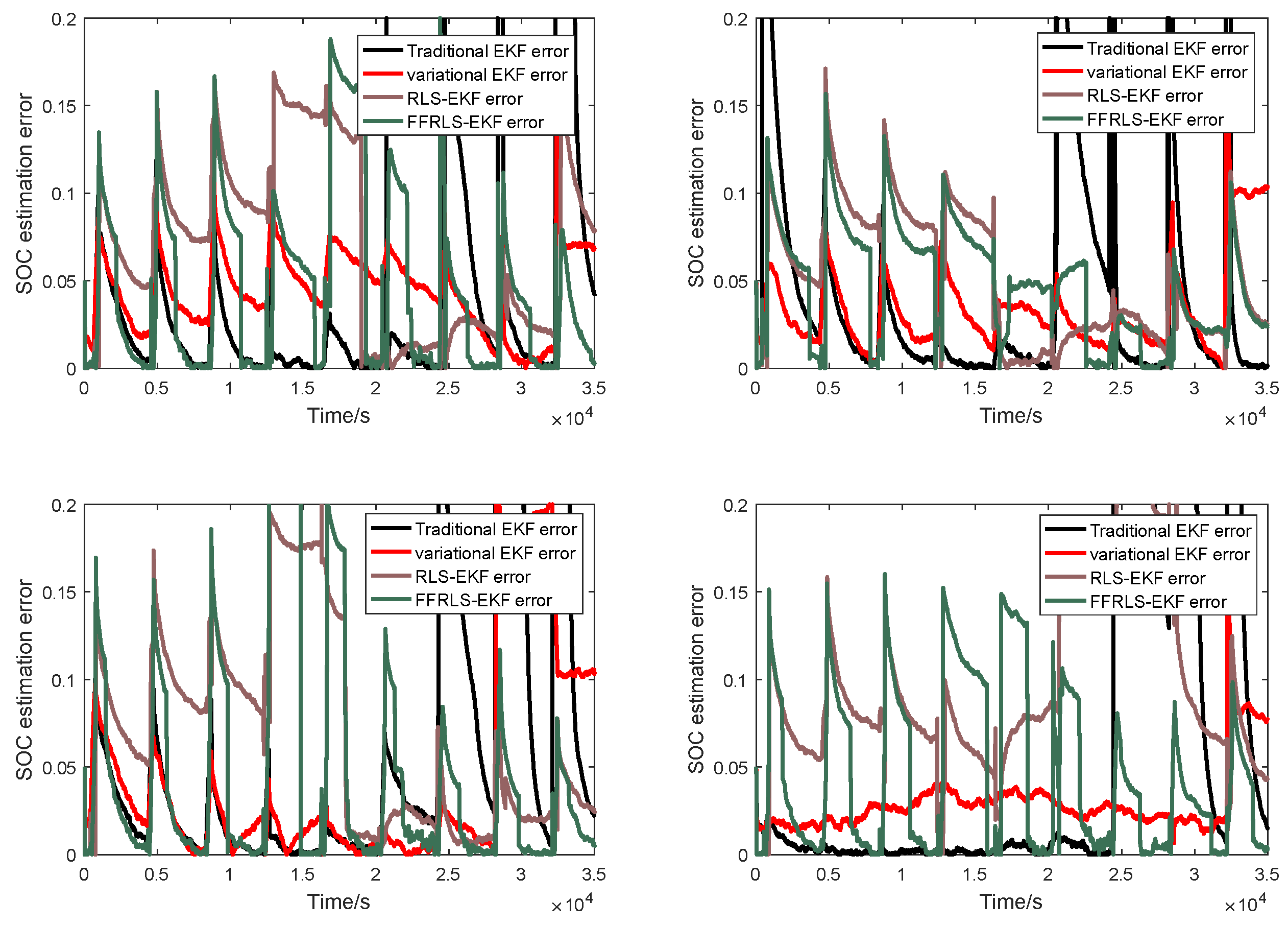
4. Experimental Validation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kampa, M.; Castanas, E. Human health effects of air pollution. Environ. Pollut. 2008, 151, 362–367. [Google Scholar] [CrossRef]
- Ge, S.; Xu, L.; Liu, H.; Fang, J. Low-carbon benefit analysis on DG penetration distribution system. J. Mod. Power Syst. Clean Energy 2015, 3, 139–148. [Google Scholar] [CrossRef]
- Biswas, P. Adapting SUV AWD powertrain to P0/P2/P4 hybrid EV architecture: Integrative packaging and capability study. In Proceedings of the IEEE Transportation Electrification Conference, Pune, India, 13–15 December 2017. [Google Scholar]
- Sun, F.C. Green Energy and Intelligent Transportation-promoting green and intelligent mobility. Green Energy Intell. Transp. 2022, 1, 100017. [Google Scholar] [CrossRef]
- Lane, B.; Shaffer, B.; Samuelsen, S. A comparison of alternative vehicle fueling infrastructure scenarios. Appl. Energy 2020, 259, 114128. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Kiaee, M.; Cruden, A.; Sharkh, S. Estimation of cost savings from participation of electric vehicles in vehicle to grid (V2G) schemes. J. Mod. Power Syst. Clean Energy 2015, 3, 249–258. [Google Scholar] [CrossRef]
- He, H.W.; Sun, F.C.; Wang, Z.P.; Lin, C.; Zhang, C.; Xiong, R.; Deng, J.; Zhu, X.; Xie, P.; Zhang, S.; et al. China’s battery electric vehicles lead the world: Achievements in technology system architecture and technological breakthroughs. Green Energy Intell. Transp. 2022, 1, 100020. [Google Scholar] [CrossRef]
- Xiong, R.; Kim, J.; Shen, W.X.; Lv, C.; Li, H.; Zhu, X.; Zhao, W.; Gao, B.; Guo, H.; Zhang, C.; et al. Key technologies for electric vehicles. Green Energy Intell. Transp. 2022, 1, 100041. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, G.; Liu, X.; He, Z. A time-efficient and accurate open circuit voltage estimation method for lithium-ion batteries. Energies 2019, 12, 1803. [Google Scholar] [CrossRef]
- Movassagh, K.; Raihan, A.; Balasingam, B.; Pattipati, K. A critical look at coulomb counting approach for state of charge estimation in batteries. Energies 2021, 14, 4074. [Google Scholar] [CrossRef]
- Shao, Y.; Liu, H.; Shao, X.D.; Sang, L.; Chen, Z.T. An all coupled electrochemical-mechanical model for all-solid-state Li-ion batteries considering the effect of contact area loss and compressive pressure. Energy 2022, 239, 121929. [Google Scholar] [CrossRef]
- Nejad, S.; Gladwin, D.T.; Stone, D.A. A systematic review of lumped-parameter equivalent circuit models for real-time estimation of lithium-ion battery states. J. Power Sources 2016, 316, 183–196. [Google Scholar] [CrossRef]
- Dong, G.; Yang, F.; Wei, Z.; Wei, J.; Tsui, K.L. Data-driven battery health prognosis using adaptive Brownian motion model. IEEE Trans. Ind. Inform. 2019, 16, 4736–4746. [Google Scholar] [CrossRef]
- Meng, J.H.; Ricco, M.; Luo, G.Z.; Swierczynski, M.; Stroe, D.; Stroe, A.; Teodorescu, R. An overview and comparison of online implementable SOC estimation methods for lithium-ion battery. IEEE Trans. Ind. Appl. 2017, 54, 1583–1591. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, F.C.; He, H.W. Data-driven State-of-Charge estimator for electric vehicles battery using robust extended Kalman filter. Int. J. Automot. Technol. 2014, 15, 89–96. [Google Scholar] [CrossRef]
- Sun, D.; Yu, X.; Wang, C.; Zhang, C.; Bhagat, R. State of charge estimation for lithium-ion battery based on an Intelligent Adaptive Extended Kalman Filter with improved noise estimator. Energy 2021, 214, 119025. [Google Scholar] [CrossRef]
- Sun, C.J.; Zhang, Y.G.; Wang, G.Q.; Gao, W. A New Variational Bayesian Adaptive Extended Kalman Filter for Cooperative Navigation. Sensors 2018, 18, 2538. [Google Scholar] [CrossRef]
- Duan, J.; Wang, P.; Ma, W.; Qiu, X.; Fang, S. State of charge estimation of lithium battery based on improved correntropy extended Kalman filter. Energies 2020, 13, 4197. [Google Scholar] [CrossRef]
- Zhu, Q.; Xu, M.; Liu, W.; Zheng, M.Q. A state of charge estimation method for lithium-ion batteries based on fractional order adaptive extended kalman filter. Energy 2019, 187, 115880. [Google Scholar] [CrossRef]
- Takyi-Aninakwa, P.; Wang, S.; Zhang, H.; Yang, X.Y.; Fernandez, C. An optimized long short-term memory-weighted fading extended Kalman filtering model with wide temperature adaptation for the state of charge estimation of lithium-ion batteries. Appl. Energy 2022, 326, 120043. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Chen, C.; Pecht, M. State of charge estimation for Li-ion batteries using neural network modeling and unscented Kalman filter-based error cancellation. Int. J. Electr. Power Energy Syst. 2014, 62, 783–791. [Google Scholar] [CrossRef]
- Gholizade-Narm, H.; Charkhgard, M. Lithium-ion battery state of charge estimation based on square-root unscented Kalman filter. IET Power Electron. 2013, 6, 1833–1841. [Google Scholar] [CrossRef]
- Wang, S.; Fernandez, C.; Fan, Y.C.; Feng, J.Q.; Yu, C.M.; Huang, K.F.; Xie, W. A novel safety assurance method based on the compound equivalent modeling and iterate reduce particle-adaptive Kalman filtering for the unmanned aerial vehicle lithium ion batteries. Energy Sci. Eng. 2020, 8, 1484–1500. [Google Scholar] [CrossRef]
- Yun, Z.; Qin, W.; Shi, W. State of charge estimation of lithium-ion battery under time-varying noise based on Variational Bayesian Estimation Methods. J. Energy Storage 2022, 52, 104916. [Google Scholar] [CrossRef]
- Liu, R.; Zhang, C. An Active Balancing Method Based on SOC and Capacitance for Lithium-Ion Batteries in Electric Vehicles. Front. Energy Res. 2021, 9, 773838. [Google Scholar] [CrossRef]
- Ait-El-Fquih, B.; Hoteit, I. Fast Kalman-like filtering for large-dimensional linear and Gaussian state-space models. IEEE Trans. Signal Process. 2015, 63, 5853–5867. [Google Scholar] [CrossRef]
- Ren, B.; Xie, C.; Sun, X.D.; Zhang, Q.; Yan, D. Parameter identification of a lithium-ion battery based on the improved recursive least square algorithm. IET Power Electron. 2020, 13, 2531–2537. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery Model | LR1865SZ |
|---|---|
| Nominal capacity | 2.5 Ah |
| Minimum capacity | 2.4 Ah |
| Charging voltage | 4.2 V |
| Nominal voltage | 3.0 V |
| Maximum charging current | 1 C (2.4 A) |
| Maximum discharging current | 1 C (2.4 A) |
| Battery No. | Initial Voltage (V) | Discharge Current (mA) | Discharge Capacity (mAh) | Discharge Energy (mWh) |
|---|---|---|---|---|
| No. 1 | 4.1238 | 2352.4 | 2337.614 | 9083.854 |
| No. 2 | 4.1319 | 2379.7 | 2362.726 | 9173.627 |
| No. 3 | 4.1282 | 2367.3 | 2361.838 | 9174.183 |
| No. 4 | 4.1378 | 2328.8 | 2317.366 | 9001.016 |
| No. 5 | 4.1307 | 2346.2 | 2336.890 | 9065.465 |
| Battery No. | Algorithm | MAE | MSE |
|---|---|---|---|
| No. 1 | Variational EKF | 0.0357 | 0.0021 |
| Traditional EKF | 0.0262 | 0.0037 | |
| RLS-EKF | 0.0779 | 0.0081 | |
| FFRLS-EKF | 0.0482 | 0.0047 | |
| No. 2 | Variational EKF | 0.0448 | 0.0025 |
| Traditional EKF | 0.0425 | 0.0097 | |
| RLS-EKF | 0.0702 | 0.0075 | |
| FFRLS-EKF | 0.0455 | 0.0047 | |
| No. 3 | Variational EKF | 0.0343 | 0.0019 |
| Traditional EKF | 0.0421 | 0.0062 | |
| RLS-EKF | 0.0505 | 0.0038 | |
| FFRLS-EKF | 0.0467 | 0.0032 | |
| No. 4 | Variational EKF | 0.0453 | 0.0057 |
| Traditional EKF | 0.0720 | 0.0237 | |
| RLS-EKF | 0.0683 | 0.0079 | |
| FFRLS-EKF | 0.0455 | 0.0062 | |
| No. 5 | Variational EKF | 0.0298 | 0.0012 |
| Traditional EKF | 0.0733 | 0.0263 | |
| RLS-EKF | 0.0990 | 0.0128 | |
| FFRLS-EKF | 0.0454 | 0.0042 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Zhang, C. An Extended Kalman Filter Design for State-of-Charge Estimation Based on Variational Approach. Batteries 2023, 9, 583. https://doi.org/10.3390/batteries9120583
Zhou Z, Zhang C. An Extended Kalman Filter Design for State-of-Charge Estimation Based on Variational Approach. Batteries. 2023; 9(12):583. https://doi.org/10.3390/batteries9120583
Chicago/Turabian StyleZhou, Ziheng, and Chaolong Zhang. 2023. "An Extended Kalman Filter Design for State-of-Charge Estimation Based on Variational Approach" Batteries 9, no. 12: 583. https://doi.org/10.3390/batteries9120583