
Cloud-Based Optimization of a Battery Model Parameter Identification Algorithm for Battery State-of-Health Estimation in Electric Vehicles

 ,
,  , ,
, ,  ,
,
Abstract
:1. Introduction
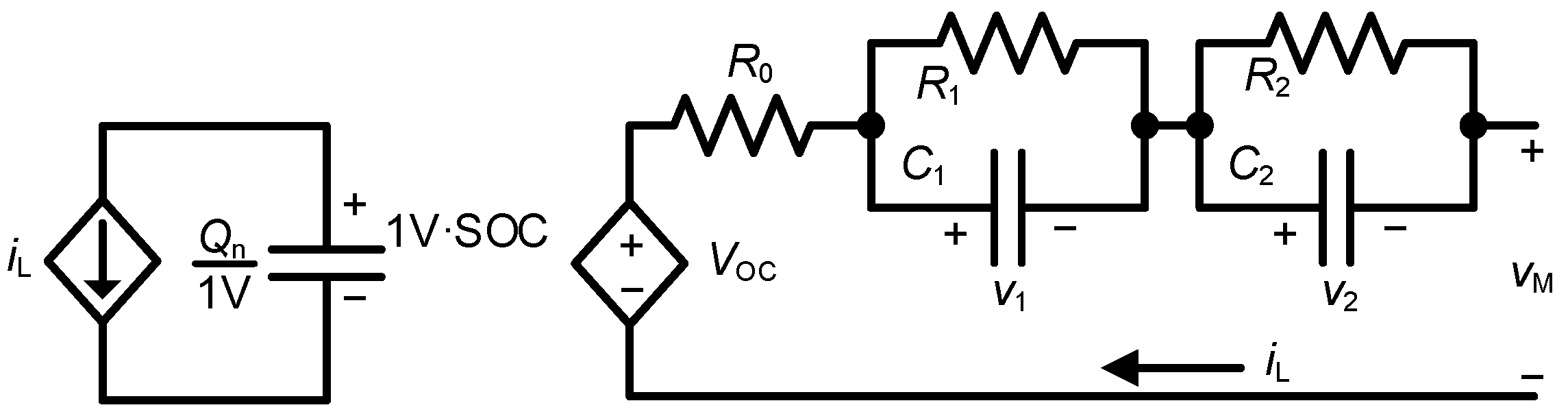
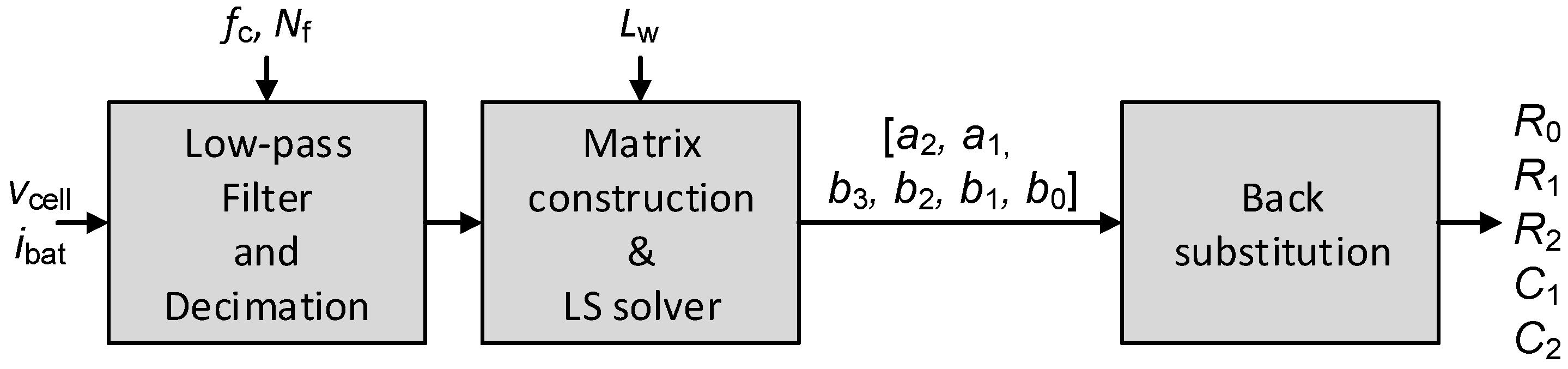
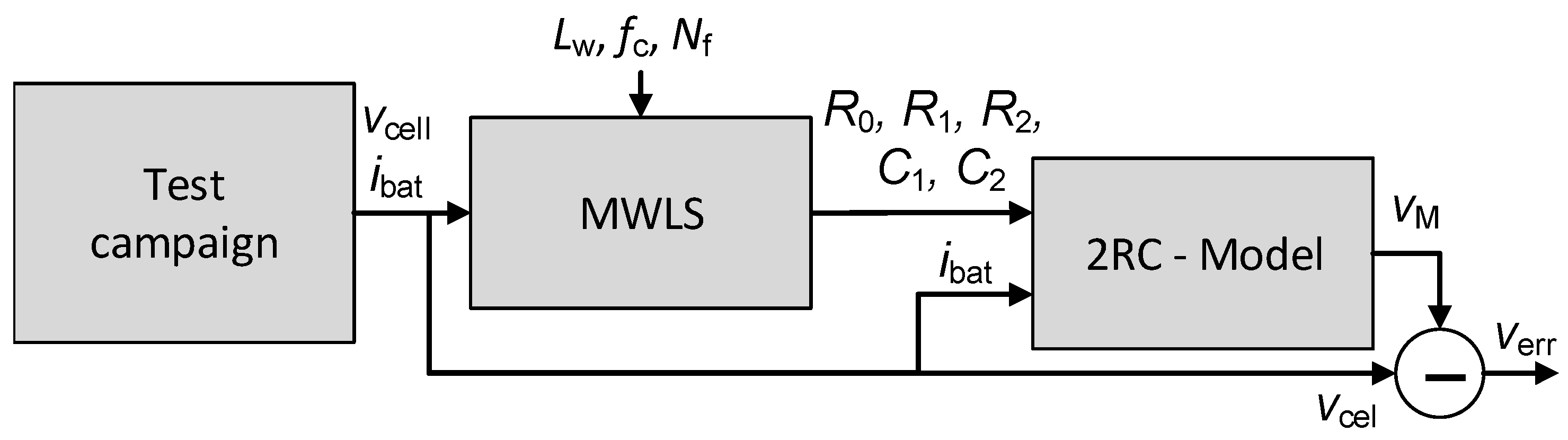
2. Battery Model Parameter Identification
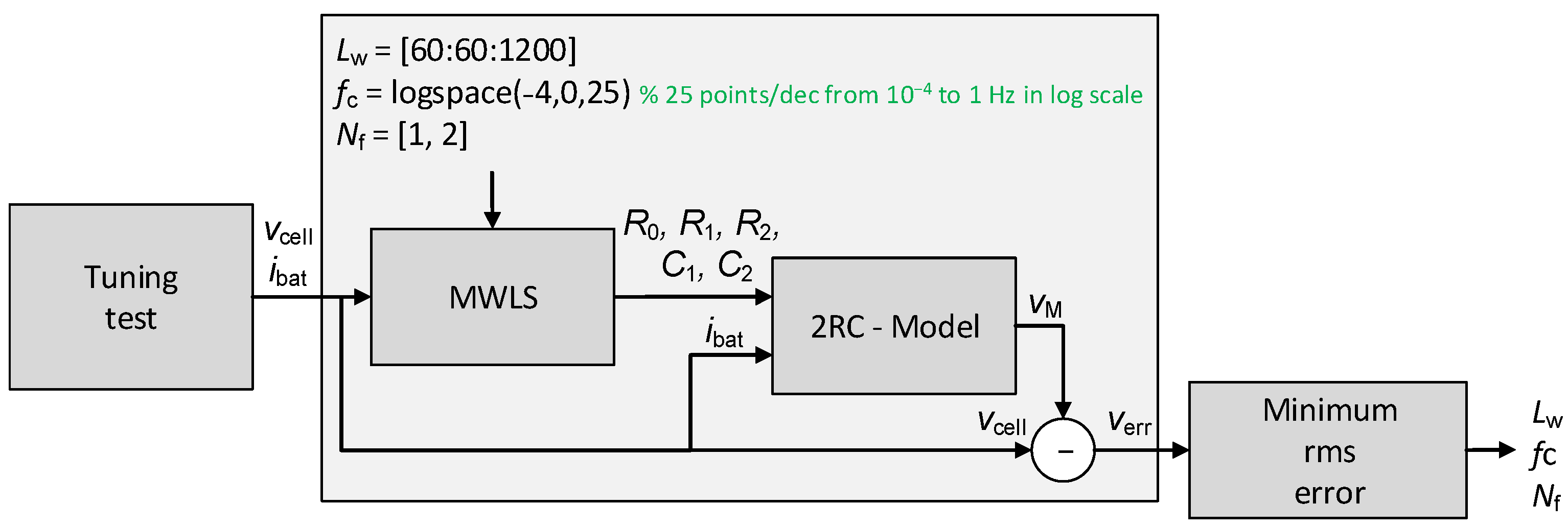
Tuning Procedure of the MWLS Identification Algorithm
- Define a reasonable range for each MWLS parameter;
- Choose, for each parameter, a reasonable number of possible values in the range previously defined;
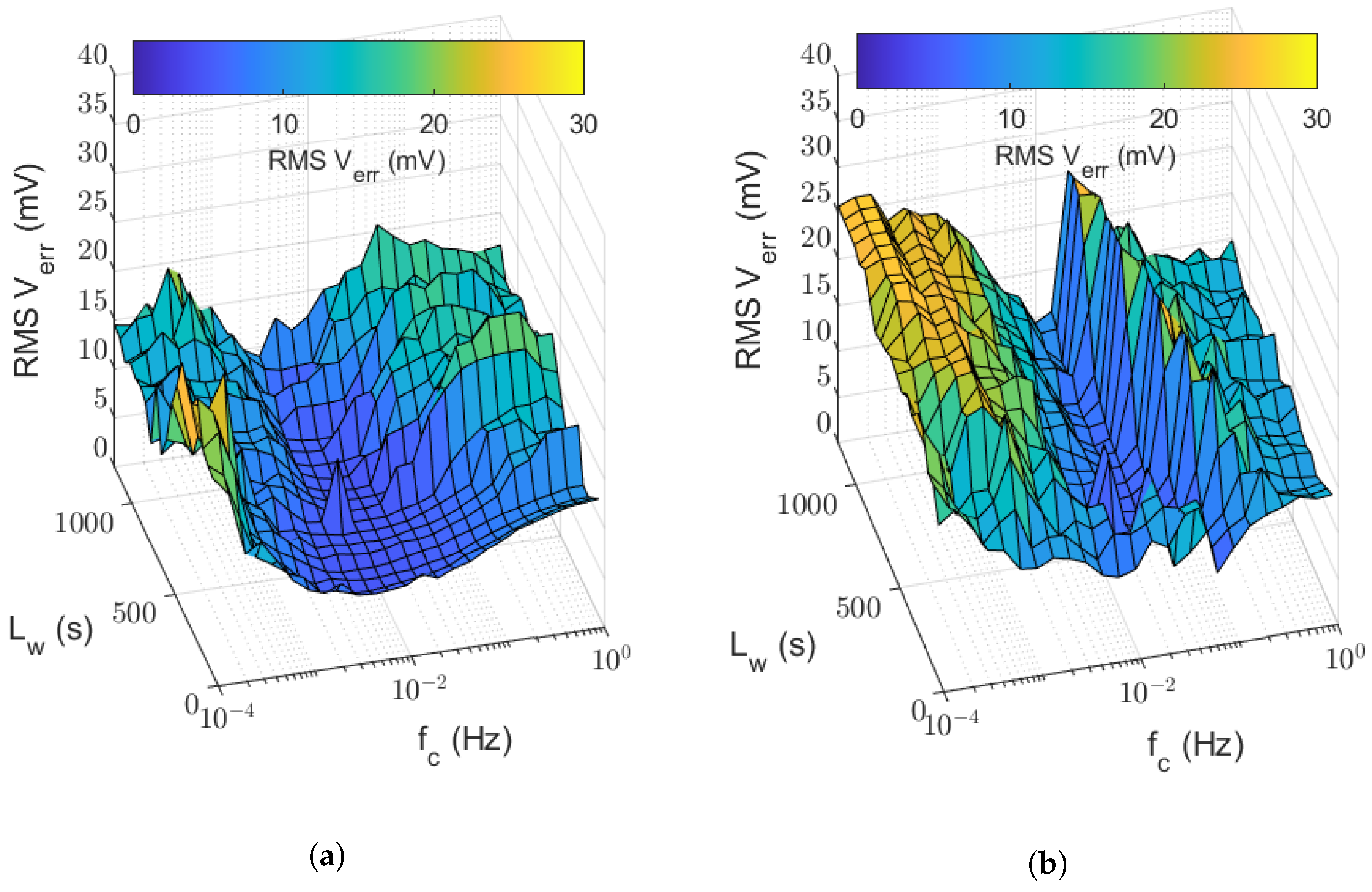
- Run the MWLS algorithm on the measured voltage and current of a battery cell in a test with a load current profile typical of the target application with each possible parameter value combination;
- Simulate the cell model with the ECM parameters identified in each MWLS execution using the same load current profile;
- Calculate the RMS error between the measured and simulated cell voltages for each MWLS execution;
- Select the best combination of , , and as the triplet of values that minimizes the RMS error.
3. Tuning of the MWLS Algorithm for an Electric Vehicle Battery
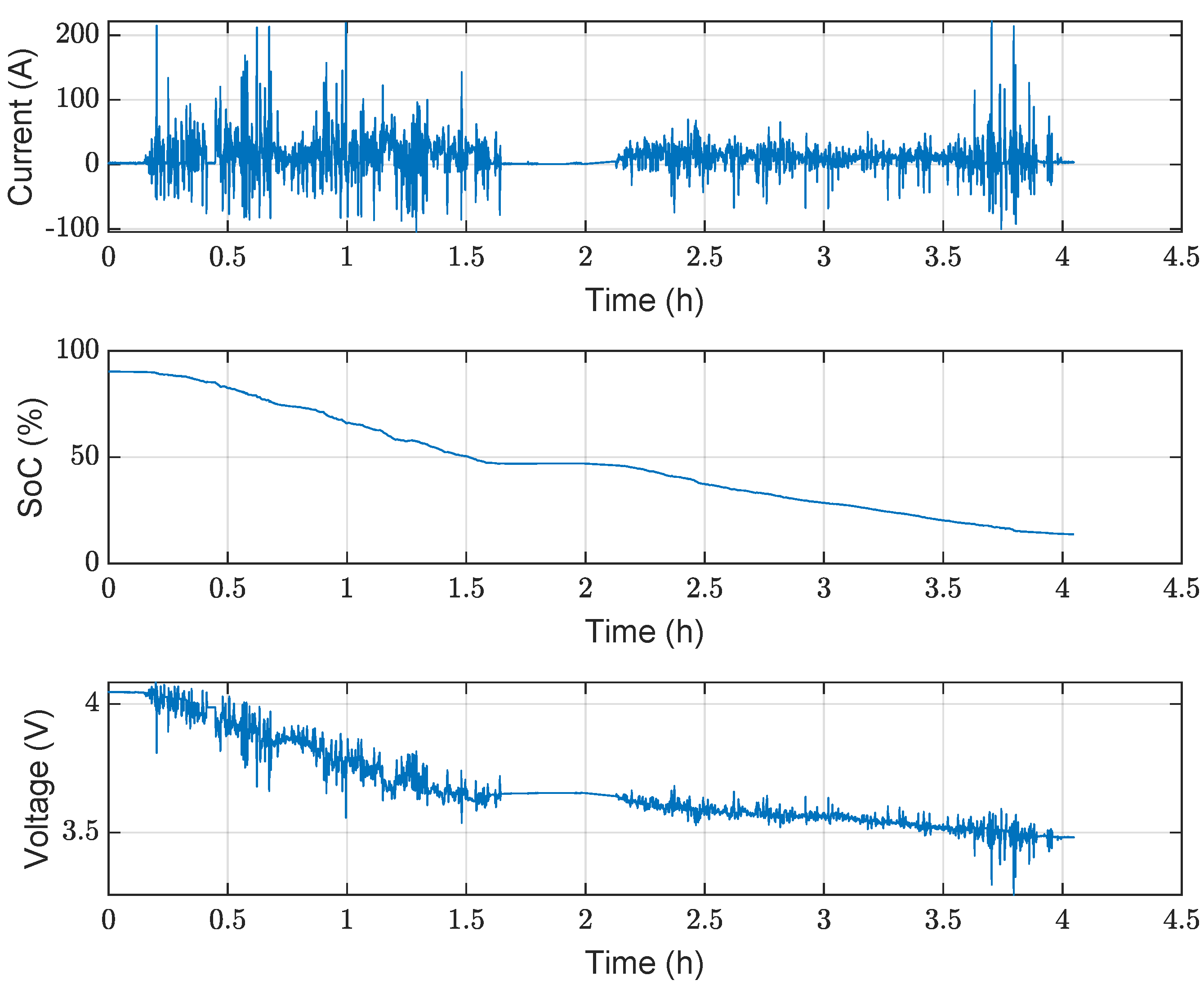
4. Experimental Test Campaign
5. Comparison with Literature Data
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Zhao, Y.; Wang, Z.; Shen, Z.J.M.; Zhang, L.; Dorrell, D.G.; Sun, F. Big data-driven decoupling framework enabling quantitative assessments of electric vehicle performance degradation. Appl. Energy 2022, 327, 120083. [Google Scholar] [CrossRef]
- Li, S.; He, H.; Wei, Z.; Zhao, P. Edge computing for vehicle battery management: Cloud-based online state estimation. J. Energy Storage 2022, 55, 105502. [Google Scholar] [CrossRef]
- Wei, Z.; Yang, X.; Li, Y.; He, H.; Li, W.; Sauer, D.U. Machine learning-based fast charging of lithium-ion battery by perceiving and regulating internal microscopic states. Energy Storage Mater. 2023, 56, 62–75. [Google Scholar] [CrossRef]
- Koleti, U.R.; Bui, T.N.M.; Dinh, T.Q.; Marco, J. The Development of Optimal Charging Protocols for Lithium-Ion Batteries to Reduce Lithium Plating. J. Energy Storage 2021, 39, 102573. [Google Scholar] [CrossRef]
- Burns, J.C.; Stevens, D.A.; Dahn, J.R. In-Situ Detection of Lithium Plating Using High Precision Coulometry. J. Electrochem. Soc. 2015, 162, A959–A964. [Google Scholar] [CrossRef]
- Mohajer, S.; Lanusse, P.; Sabatier, J.; Cois, O. Design of a Model-based Fractional-Order Controller for Optimal Charging of Batteries. IFAC-PapersOnLine 2018, 51, 97–102. [Google Scholar] [CrossRef]
- Vo, T.T.; Chen, X.; Shen, W.; Kapoor, A. New charging strategy for lithium-ion batteries based on the integration of Taguchi method and state of charge estimation. J. Power Sources 2015, 273, 413–422. [Google Scholar] [CrossRef]
- Perez, H.E.; Hu, X.; Dey, S.; Moura, S.J. Optimal Charging of Li-Ion Batteries with Coupled Electro-Thermal-Aging Dynamics. IEEE Trans. Veh. Technol. 2017, 66, 7761–7770. [Google Scholar] [CrossRef]
- Abdollahi, A.; Han, X.; Avvari, G.V.; Raghunathan, N.; Balasingam, B.; Pattipati, K.R.; Bar-Shalom, Y. Optimal battery charging, Part I: Minimizing time-to-charge, energy loss, and temperature rise for OCV-resistance battery model. J. Power Sources 2016, 303, 388–398. [Google Scholar] [CrossRef]
- Hwang, G.; Sitapure, N.; Moon, J.; Lee, H.; Hwang, S.; Sang-Il Kwon, J. Model predictive control of Lithium-ion batteries: Development of optimal charging profile for reduced intracycle capacity fade using an enhanced single particle model (SPM) with first-principled chemical/mechanical degradation mechanisms. Chem. Eng. J. 2022, 435, 134768. [Google Scholar] [CrossRef]
- Barzacchi, L.; Lagnoni, M.; Rienzo, R.D.; Bertei, A.; Baronti, F. Enabling early detection of lithium-ion battery degradation by linking electrochemical properties to equivalent circuit model parameters. J. Energy Storage 2022, 50, 104213. [Google Scholar] [CrossRef]
- Wang, Z.; Feng, G.; Zhen, D.; Gu, F.; Ball, A. A review on online state of charge and state of health estimation for lithium-ion batteries in electric vehicles. Energy Rep. 2021, 7, 5141–5161. [Google Scholar] [CrossRef]
- Noura, N.; Boulon, L.; Jemeï, S. A Review of Battery State of Health Estimation Methods: Hybrid Electric Vehicle Challenges. World Electr. Veh. J. 2020, 11, 66. [Google Scholar] [CrossRef]
- Restaino, R.; Zamboni, W. Comparing particle filter and extended kalman filter for battery State-Of-Charge estimation. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 4018–4023. [Google Scholar] [CrossRef]
- Morello, R.; Di Rienzo, R.; Roncella, R.; Saletti, R.; Baronti, F. Hardware-in-the-Loop Platform for Assessing Battery State Estimators in Electric Vehicles. IEEE Access 2018, 6, 68210–68220. [Google Scholar] [CrossRef]
- Zhu, W.; Zhou, X.; Cao, M.; Wang, Y.; Zhang, T. The Cloud-End Collaboration Battery Management System with Accurate State-of-Charge Estimation for Large-Scale Lithium-ion Battery System. In Proceedings of the 2022 8th International Conference on Big Data and Information Analytics (BigDIA), Guiyang, China, 24–25 August 2022; pp. 199–204. [Google Scholar] [CrossRef]
- Shi, D.; Zhao, J.; Wang, Z.; Zhao, H.; Eze, C.; Wang, J.; Lian, Y.; Burke, A.F. Cloud-Based Deep Learning for Co-Estimation of Battery State of Charge and State of Health. Energies 2023, 16, 3855. [Google Scholar] [CrossRef]
- Mondal, A.; Routray, A.; Puravankara, S. Parameter identification and co-estimation of state-of-charge of Li-ion battery in real-time on Internet-of-Things platform. J. Energy Storage 2022, 51, 104370. [Google Scholar] [CrossRef]
- Li, W.; Rentemeister, M.; Badeda, J.; Jöst, D.; Schulte, D.; Sauer, D.U. Digital twin for battery systems: Cloud battery management system with online state-of-charge and state-of-health estimation. J. Energy Storage 2020, 30, 101557. [Google Scholar] [CrossRef]
- Rahimi-Eichi, H.; Baronti, F.; Chow, M.Y. Online Adaptive Parameter Identification and State-of-Charge Coestimation for Lithium-Polymer Battery Cells. IEEE Trans. Ind. Electron. 2014, 61, 2053–2061. [Google Scholar] [CrossRef]
- Morello, R.; Di Rienzo, R.; Roncella, R.; Saletti, R.; Baronti, F. Tuning of Moving Window Least Squares-based algorithm for online battery parameter estimation. In Proceedings of the 2017 14th International Conference on Synthesis, Modeling, Analysis and Simulation Methods and Applications to Circuit Design (SMACD), Giardini Naxos, Italy, 12–15 June 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Bruch, M.; Millet, L.; Kowal, J.; Vetter, M. Novel method for the parameterization of a reliable equivalent circuit model for the precise simulation of a battery cell’s electric behavior. J. Power Sources 2021, 490, 229513. [Google Scholar] [CrossRef]
- Paul, S.; Diegelmann, C.; Kabza, H.; Tillmetz, W. Analysis of ageing inhomogeneities in lithium-ion battery systems. J. Power Sources 2013, 239, 642–650. [Google Scholar] [CrossRef]
- Schindler, M.; Sturm, J.; Ludwig, S.; Schmitt, J.; Jossen, A. Evolution of initial cell-to-cell variations during a three-year production cycle. eTransportation 2021, 8, 100102. [Google Scholar] [CrossRef]
- Ecker, M.; Nieto, N.; Käbitz, S.; Schmalstieg, J.; Blanke, H.; Warnecke, A.; Sauer, D.U. Calendar and cycle life study of Li(NiMnCo)O2-based 18650 lithium-ion batteries. J. Power Sources 2014, 248, 839–851. [Google Scholar] [CrossRef]
- Peng, N.; Zhang, S.; Guo, X.; Zhang, X. Online parameters identification and state of charge estimation for lithium-ion batteries using improved adaptive dual unscented Kalman filter. Int. J. Energy Res. 2021, 45, 975–990. [Google Scholar] [CrossRef]
- Lao, Z.; Xia, B.; Wang, W.; Sun, W.; Lai, Y.; Wang, M. A Novel Method for Lithium-Ion Battery Online Parameter Identification Based on Variable Forgetting Factor Recursive Least Squares. Energies 2018, 11, 1358. [Google Scholar] [CrossRef]
- Li, L.; Zhu, H.; Zhou, A.; Hu, M.; Fu, C.; Qin, D. A Novel Online Parameter Identification Algorithm for Fractional-Order Equivalent Circuit Model of Lithium-Ion Batteries. Int. J. Electrochem. Sci. 2020, 15, 6863–6879. [Google Scholar] [CrossRef]
- Pai, H.Y.; Liu, Y.H.; Ye, S.P. Online estimation of lithium-ion battery equivalent circuit model parameters and state of charge using time-domain assisted decoupled recursive least squares technique. J. Energy Storage 2023, 62, 106901. [Google Scholar] [CrossRef]
- Sun, C.; Lin, H.; Cai, H.; Gao, M.; Zhu, C.; He, Z. Improved parameter identification and state-of-charge estimation for lithium-ion battery with fixed memory recursive least squares and sigma-point Kalman filter. Electrochim. Acta 2021, 387, 138501. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOC (%) | |||||||
|---|---|---|---|---|---|---|---|
| Test # | Day | Length (h) | Mean Current (A) | Start | End | Mean Speed (km h−1) | Distance (km) |
| 1 | 28 April 2020 | 1.5 | 28.4 | 93.1 | 19.8 | 66.6 | 98.7 |
| 2 | 25 May 2020 | 2.2 | 21.8 | 92.8 | 8.46 | 4.9 | 140.8 |
| 3 | 8 June 2020 | 2.3 | 17.9 | 89.7 | 19.2 | 53.6 | 121.9 |
| 4 | 20 June 2020 | 3.8 | 12.3 | 92.6 | 13.1 | 43 | 163.6 |
| 5 | 29 June 2020 | 2.3 | 20.1 | 94.8 | 10.1 | NA 1 | NA 1 |
| 6 | 4 July 2020 | 4.3 | 11.8 | 93 | 10.2 | 36.1 | 154 |
| 7 | 17 August 2020 | 4.1 | 11.7 | 94.7 | 12.5 | NA 1 | NA 1 |
| 8 | 4 September 2020 | 3.4 | 12.8 | 93 | 16.5 | 35.8 | 120.7 |
| 9 | 27 September 2020 | 2.1 | 19 | 89.2 | 14.5 | 49.1 | 105.1 |
| 10 | 16 November 2020 | 2.1 | 19.3 | 95.7 | 14.7 | 47.2 | 98.7 |
| Work | Battery Model | Estimation Method | RMS Error |
|---|---|---|---|
| This work | ECM with 2-RC | MWLS | 11 (Road data) |
| [26] | ECM with 1-RC | ADUKF | (DST) |
| (FUDS) | |||
| [27] | ECM with 1-RC | FFRLS | (NEDC) |
| [28] | Fractional Order ECM | RLS | (DST) |
| (FUDS) | |||
| [29] | ECM with 2-RC | TD-DRLS | (FUDS) |
| (DST) | |||
| [30] | ECM with 2-RC | FMRLS-SPKF | (FUDS) |
| and Hysteresis | (DST) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Rienzo, R.; Nicodemo, N.; Roncella, R.; Saletti, R.; Vennettilli, N.; Asaro, S.; Tola, R.; Baronti, F. Cloud-Based Optimization of a Battery Model Parameter Identification Algorithm for Battery State-of-Health Estimation in Electric Vehicles. Batteries 2023, 9, 486. https://doi.org/10.3390/batteries9100486
Di Rienzo R, Nicodemo N, Roncella R, Saletti R, Vennettilli N, Asaro S, Tola R, Baronti F. Cloud-Based Optimization of a Battery Model Parameter Identification Algorithm for Battery State-of-Health Estimation in Electric Vehicles. Batteries. 2023; 9(10):486. https://doi.org/10.3390/batteries9100486
Chicago/Turabian StyleDi Rienzo, Roberto, Niccolò Nicodemo, Roberto Roncella, Roberto Saletti, Nando Vennettilli, Salvatore Asaro, Roberto Tola, and Federico Baronti. 2023. "Cloud-Based Optimization of a Battery Model Parameter Identification Algorithm for Battery State-of-Health Estimation in Electric Vehicles" Batteries 9, no. 10: 486. https://doi.org/10.3390/batteries9100486