
Physics-Informed Recurrent Neural Networks with Fractional-Order Constraints for the State Estimation of Lithium-Ion Batteries

 , , and
, , and
Abstract
:1. Introduction
2. Preliminaries
2.1. Fractional Calculus
2.1.1. Fractional-Order Derivative Definitions
2.1.2. Fractional-Order Gradient
2.2. Fractional-Order Model of the Battery
2.3. Recurrent Neural Network
3. Physics-Informed Recurrent Neural Network for State Estimation
3.1. Fractional-Order Gradient Descent Methods with Momentum
3.2. Fractional-Order Constraints
3.3. Framework and Training Procedure
4. Experiments and Results
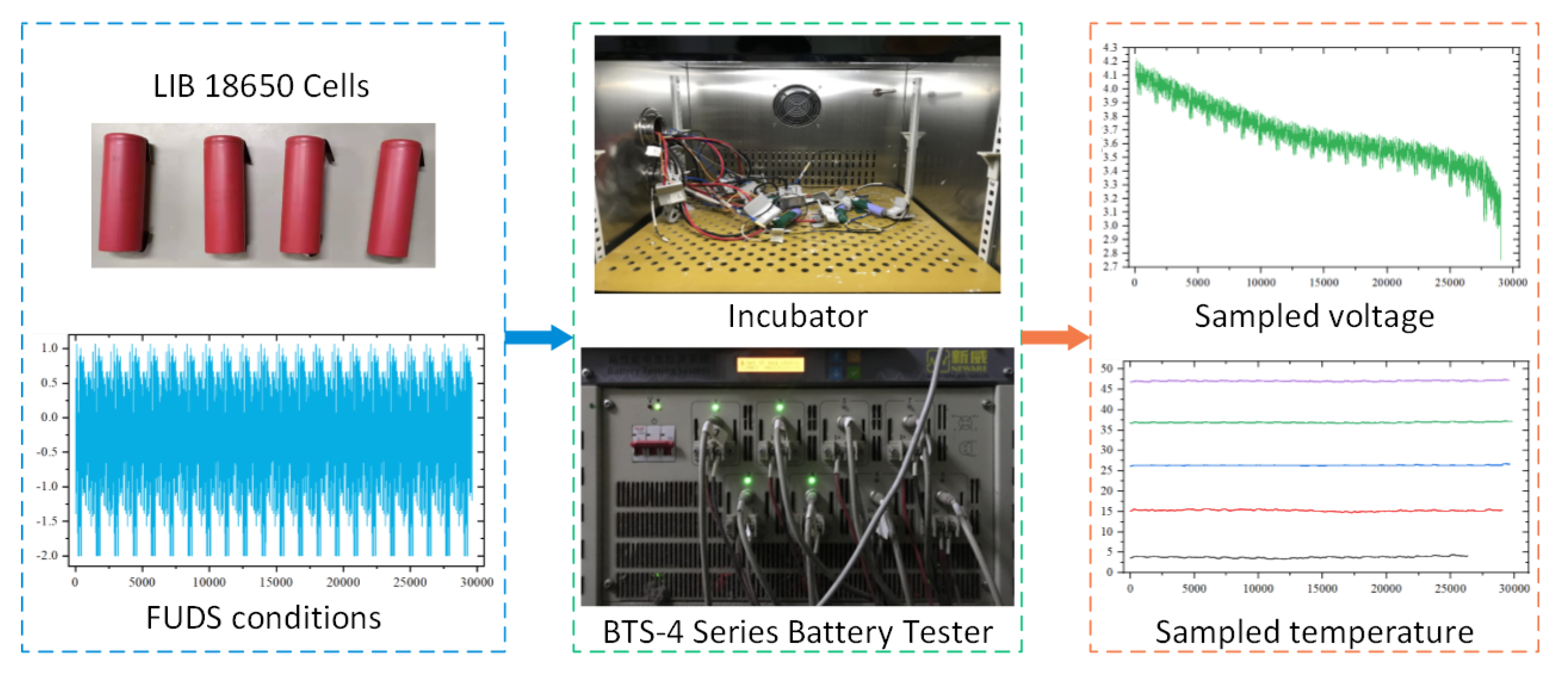
4.1. Experiment Setup
4.2. Sensitivity of Fractional Order and Impedance
4.3. Estimation with Fractional-Order Constraints
4.4. Estimation with Physics-Informed Recurrent Neural Network
- The proposed fPIRNN with FOGDm and FO constraints can control SOC’s estimation accuracy within 8% when coexisting with learning noise and within 2.5% when filtering the noise (“fitted error”);
- Both FOGDm and fractional-order constraints hold the physics-informed knowledge of LIBs and can optimize the proposed fPIRNN;
- The FOGDm method for backpropagation not only introduces improved performances than fractional-order constraints but also introduces more training fluctuations and estimation noise;
- Besides certain enhancements to fPIRNN, fractional-order constraints can also stabilize the output and reduce the output’s noise;
- FOGDm and fractional-order constraints hold opposite effects on noise, which can compensate with each other, resulting in the final version of fPIRNN in this work.
- Combined with the design of embedding physics-informed knowledge, specific conditions at low SOC range and high SOC range can also be embedded to increase the prediction accuracy in these crucial ranges.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PINN | Physics-informed neural network; |
| PIRNN | Physics-informed recurrent neural network; |
| fPIRNN | fractional-order physics-informed recurrent neural network; |
| FOGD | Fractional-order gradient descent; |
| FOGDm | Fractional-order gradient descent with momentum; |
| FUDS | Federal urban driving schedule; |
| PDE | Partial differential equation; |
| RNN | Recurrent neural network; |
| NN | Neural network; |
| SOC | State of charge; |
| LIB | Lithium-ion battery; |
| FOM | Fractional-order model; |
| MSE | Mean square error; |
| G-L | Grünwald–Letnikov; |
| ML | Machine learning; |
| CPE | Constant phase element; |
| OCV | Open circuit voltage. |
References
- Yang, R.; Xiong, R.; Ma, S.; Lin, X. Characterization of external short circuit faults in electric vehicle Li-ion battery packs and prediction using artificial neural networks. Appl. Energy 2020, 260, 114253. [Google Scholar] [CrossRef]
- Roman, D.; Saxena, S.; Robu, V.; Pecht, M.; Flynn, D. Machine learning pipeline for battery state-of-health estimation. Nat. Mach. Intell. 2021, 3, 447–456. [Google Scholar] [CrossRef]
- Schindler, M.; Sturm, J.; Ludwig, S.; Schmitt, J.; Jossen, A. Evolution of initial cell-to-cell variations during a three-year production cycle. ETransportation 2021, 8, 100102. [Google Scholar] [CrossRef]
- Tanim, T.R.; Dufek, E.J.; Walker, L.K.; Ho, C.D.; Hendricks, C.E.; Christophersen, J.P. Advanced diagnostics to evaluate heterogeneity in lithium-ion battery modules. ETransportation 2020, 3, 100045. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- Lu, Y.; Li, K.; Han, X.; Feng, X.; Chu, Z.; Lu, L.; Huang, P.; Zhang, Z.; Zhang, Y.; Yin, F.; et al. A method of cell-to-cell variation evaluation for battery packs in electric vehicles with charging cloud data. ETransportation 2020, 6, 100077. [Google Scholar] [CrossRef]
- Zahid, T.; Xu, K.; Li, W.; Li, C.; Li, H. State of charge estimation for electric vehicle power battery using advanced machine learning algorithm under diversified drive cycles. Energy 2018, 162, 871–882. [Google Scholar] [CrossRef]
- Su, L.; Wu, M.; Li, Z.; Zhang, J. Cycle life prediction of lithium-ion batteries based on data-driven methods. ETransportation 2021, 10, 100137. [Google Scholar] [CrossRef]
- Yang, H.; Wang, P.; An, Y.; Shi, C.; Sun, X.; Wang, K.; Zhang, X.; Wei, T.; Ma, Y. Remaining useful life prediction based on denoising technique and deep neural network for lithium-ion capacitors. ETransportation 2020, 5, 100078. [Google Scholar] [CrossRef]
- How, D.N.; Hannan, M.; Lipu, M.H.; Ker, P.J. State of charge estimation for lithium-ion batteries using model-based and data-driven methods: A review. IEEE Access 2019, 7, 136116–136136. [Google Scholar] [CrossRef]
- Lipu, M.H.; Hannan, M.; Hussain, A.; Ayob, A.; Saad, M.H.; Karim, T.F.; How, D.N. Data-driven state of charge estimation of lithium-ion batteries: Algorithms, implementation factors, limitations and future trends. J. Clean. Prod. 2020, 277, 124110. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Li, M.; Chen, Z. A review of key issues for control and management in battery and ultra-capacitor hybrid energy storage systems. ETransportation 2020, 4, 100064. [Google Scholar] [CrossRef]
- Lai, X.; Yi, W.; Cui, Y.; Qin, C.; Han, X.; Sun, T.; Zhou, L.; Zheng, Y. Capacity estimation of lithium-ion cells by combining model-based and data-driven methods based on a sequential extended Kalman filter. Energy 2021, 216, 119233. [Google Scholar] [CrossRef]
- Zheng, Y.; Gao, W.; Han, X.; Ouyang, M.; Lu, L.; Guo, D. An accurate parameters extraction method for a novel on-board battery model considering electrochemical properties. J. Energy Storage 2019, 24, 100745. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Y.; Liao, X. State-of-art survey of fractional order modeling and estimation methods for lithium-ion batteries. Fract. Calc. Appl. Anal. 2019, 22, 1449–1479. [Google Scholar] [CrossRef]
- Wang, B.; Liu, Z.; Li, S.E.; Moura, S.J.; Peng, H. State-of-charge estimation for lithium-ion batteries based on a nonlinear fractional model. IEEE Trans. Control Syst. Technol. 2016, 25, 3–11. [Google Scholar] [CrossRef]
- Nasser-Eddine, A.; Huard, B.; Gabano, J.D.; Poinot, T. A two steps method for electrochemical impedance modeling using fractional order system in time and frequency domains. Control Eng. Pract. 2019, 86, 96–104. [Google Scholar] [CrossRef]
- Wang, X.; Wei, X.; Zhu, J.; Dai, H.; Zheng, Y.; Xu, X.; Chen, Q. A review of modeling, acquisition, and application of lithium-ion battery impedance for onboard battery management. ETransportation 2021, 7, 100093. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Yu, Q. Fractional-order model-based incremental capacity analysis for degradation state recognition of lithium-ion batteries. IEEE Trans. Ind. Electron. 2018, 66, 1576–1584. [Google Scholar] [CrossRef]
- Zou, C.; Hu, X.; Dey, S.; Zhang, L.; Tang, X. Nonlinear fractional-order estimator with guaranteed robustness and stability for lithium-ion batteries. IEEE Trans. Ind. Electron. 2017, 65, 5951–5961. [Google Scholar] [CrossRef]
- Li, S.; Hu, M.; Li, Y.; Gong, C. Fractional-order modeling and SOC estimation of lithium-ion battery considering capacity loss. Int. J. Energy Res. 2019, 43, 417–429. [Google Scholar] [CrossRef] [Green Version]
- Sulzer, V.; Mohtat, P.; Aitio, A.; Lee, S.; Yeh, Y.T.; Steinbacher, F.; Khan, M.U.; Lee, J.W.; Siegel, J.B.; Stefanopoulou, A.G.; et al. The challenge and opportunity of battery lifetime prediction from field data. Joule 2021, 5, 1934–1955. [Google Scholar] [CrossRef]
- Feng, X.; Merla, Y.; Weng, C.; Ouyang, M.; He, X.; Liaw, B.Y.; Santhanagopalan, S.; Li, X.; Liu, P.; Lu, L.; et al. A reliable approach of differentiating discrete sampled-data for battery diagnosis. ETransportation 2020, 3, 100051. [Google Scholar] [CrossRef]
- Ng, M.F.; Zhao, J.; Yan, Q.; Conduit, G.J.; Seh, Z.W. Predicting the state of charge and health of batteries using data-driven machine learning. Nat. Mach. Intell. 2020, 2, 161–170. [Google Scholar] [CrossRef] [Green Version]
- Tian, J.; Xiong, R.; Shen, W.; Lu, J.; Yang, X.G. Deep neural network battery charging curve prediction using 30 points collected in 10 min. Joule 2021, 5, 1521–1534. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Chen, W.; Wang, L.; Lin, P.; Qu, C. Online accurate state of health estimation for battery systems on real-world electric vehicles with variable driving conditions considered. J. Clean. Prod. 2021, 294, 125814. [Google Scholar] [CrossRef]
- Chen, Z.; Zhao, H.; Zhang, Y.; Shen, S.; Shen, J.; Liu, Y. State of health estimation for lithium-ion batteries based on temperature prediction and gated recurrent unit neural network. J. Power Sources 2022, 521, 230892. [Google Scholar] [CrossRef]
- Han, X.; Feng, X.; Ouyang, M.; Lu, L.; Li, J.; Zheng, Y.; Li, Z. A comparative study of charging voltage curve analysis and state of health estimation of lithium-ion batteries in electric vehicle. Automot. Innov. 2019, 2, 263–275. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Wang, Y.; Huang, Y.; Bhushan Gopaluni, R.; Cao, Y.; Heere, M.; Mühlbauer, M.J.; Mereacre, L.; Dai, H.; Liu, X.; et al. Data-driven capacity estimation of commercial lithium-ion batteries from voltage relaxation. Nat. Commun. 2022, 13, 1–10. [Google Scholar] [CrossRef]
- Hu, T.; He, Z.; Zhang, X.; Zhong, S. Finite-time stability for fractional-order complex-valued neural networks with time delay. Appl. Math. Comput. 2020, 365, 124715. [Google Scholar] [CrossRef]
- Huang, Y.; Yuan, X.; Long, H.; Fan, X.; Cai, T. Multistability of fractional-order recurrent neural networks with discontinuous and nonmonotonic activation functions. IEEE Access 2019, 7, 116430–116437. [Google Scholar] [CrossRef]
- Alsaedi, A.; Ahmad, B.; Kirane, M. A survey of useful inequalities in fractional calculus. Fract. Calc. Appl. Anal. 2017, 20, 574–594. [Google Scholar] [CrossRef]
- Zhang, Q.; Shang, Y.; Li, Y.; Cui, N.; Duan, B.; Zhang, C. A novel fractional variable-order equivalent circuit model and parameter identification of electric vehicle Li-ion batteries. ISA Trans. 2019, 97, 448–457. [Google Scholar] [CrossRef]
- Khan, S.; Ahmad, J.; Naseem, I.; Moinuddin, M. A novel fractional gradient-based learning algorithm for recurrent neural networks. Circuits, Syst. Signal Process. 2018, 37, 593–612. [Google Scholar] [CrossRef]
- Chen, Y.; Gao, Q.; Wei, Y.; Wang, Y. Study on fractional order gradient methods. Appl. Math. Comput. 2017, 314, 310–321. [Google Scholar] [CrossRef]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. Phys. 2021, 3, 422–440. [Google Scholar] [CrossRef]
- Han, X.; Ouyang, M.; Lu, L.; Li, J.; Zheng, Y.; Li, Z. A comparative study of commercial lithium ion battery cycle life in electrical vehicle: Aging mechanism identification. J. Power Sources 2014, 251, 38–54. [Google Scholar] [CrossRef]
- Guo, D.; Yang, G.; Feng, X.; Han, X.; Lu, L.; Ouyang, M. Physics-based fractional-order model with simplified solid phase diffusion of lithium-ion battery. J. Energy Storage 2020, 30, 101404. [Google Scholar] [CrossRef]
- Guo, D.; Yang, G.; Han, X.; Feng, X.; Lu, L.; Ouyang, M. Parameter identification of fractional-order model with transfer learning for aging lithium-ion batteries. Int. J. Energy Res. 2021, 45, 12825–12837. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Lu, J.; Chen, C.; Shen, W. Battery state-of-charge estimation amid dynamic usage with physics-informed deep learning. Energy Storage Mater. 2022, 50, 718–729. [Google Scholar] [CrossRef]
- Li, W.; Zhang, J.; Ringbeck, F.; Jöst, D.; Zhang, L.; Wei, Z.; Sauer, D.U. Physics-informed neural networks for electrode-level state estimation in lithium-ion batteries. J. Power Sources 2021, 506, 230034. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Procedure 3.1 Training details of fPIRNN for SOC estimation of LIBs | |
|---|---|
| input: | Sampled dataset |
| step 1 | Construct a basic RNN with specific hidden layers, neurons, and state feedbacks. |
| step 2 | Divide dataset into training dataset, validation dataset, and testing dataset. |
| step 3 | Initialization. Specify the initial parameters values of fPIRNN, weight , epoch threshold , learning rate , fractional order , desired loss . |
| step 4 | While epoch ≤ threshold : |
| Forward propagation, calculate neuron states by (13) and (14) from input to output. | |
| Calculate the measured loss of the output . | |
| Calculate the PDE loss under the FO constraints by (24), (31), and (32). | |
| Calculate training loss with and . | |
| Backpropagation, update weights with the FOGDm method by (20). | |
| Epoch = epoch +1 | |
| step 5 | If achieves : |
| training finished; | |
| else: | |
| adjust setup and back to step2 to re-train. | |
| output: | Trained fPIRNN with stable parameters, which can make predictions at the testing dataset. |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| rated capacity (0.5A) | 2000 mAh | rated voltage | 3.7 V |
| max charge voltage | 4.2 V | discharge cut-off voltage | 2.75 V |
| max charging current | 1 A | max discharging current | 2 A |
| working temperature (charge) | – | working temperature(discharge) | – |
| Type | Name | Value/Range | Attribution |
|---|---|---|---|
| Unchanged parameters | hidden layers | 1 | fPIRNN structure |
| hidden neurons | 12 | ||
| max epoch | 1500 | ||
| performance function | MSE | ||
| train:valid:test | 0.75:0.05:0.20 | ||
| Sensitive parameters | fractional order | FOGDm in (20) | |
| momentum weight | FOGDm in (20) | ||
| learning rate | FOGDm in (20) | ||
| fractional order | FO PDE in (31) | ||
| ratio of OCV-SOC | FO PDE in (31) | ||
| capacitance | FO PDE in (31) | ||
| ohm resistance | [, ] | FO PDE in (31) | |
| loss weight | final loss in (22) | ||
| loss weight | final loss in (22) |
| Performance | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 0.2787 | 0.4308 | 0.2140 | 0.1005 | 0.2685 | 0.2224 | 0.2902 | 0.2775 | 0.2775 | |
| 0.2794 | 0.4420 | 0.1990 | 0.0964 | 0.3566 | 0.1604 | 0.2622 | 0.2504 | 0.2504 | |
| 0.0802 | 0.0946 | 0.2794 | 0.0189 | 0.8163 | 0.4465 | 0.20821 | 0.2887 | 0.2887 | |
| 0.0271 | 0.1053 | 0.1011 | 0.0375 | 0.7690 | 0.5591 | 0.2487 | 0.2233 | 0.2233 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Han, X.; Guo, D.; Lu, L.; Chen, Y.; Ouyang, M. Physics-Informed Recurrent Neural Networks with Fractional-Order Constraints for the State Estimation of Lithium-Ion Batteries. Batteries 2022, 8, 148. https://doi.org/10.3390/batteries8100148
Wang Y, Han X, Guo D, Lu L, Chen Y, Ouyang M. Physics-Informed Recurrent Neural Networks with Fractional-Order Constraints for the State Estimation of Lithium-Ion Batteries. Batteries. 2022; 8(10):148. https://doi.org/10.3390/batteries8100148
Chicago/Turabian StyleWang, Yanan, Xuebing Han, Dongxu Guo, Languang Lu, Yangquan Chen, and Minggao Ouyang. 2022. "Physics-Informed Recurrent Neural Networks with Fractional-Order Constraints for the State Estimation of Lithium-Ion Batteries" Batteries 8, no. 10: 148. https://doi.org/10.3390/batteries8100148