
Experimental Study on the Effect of the Angle of Attack on the Flow-Induced Vibration of a Harbor Seal’s Whisker

Abstract
:1. Introduction
2. Experimental Setup
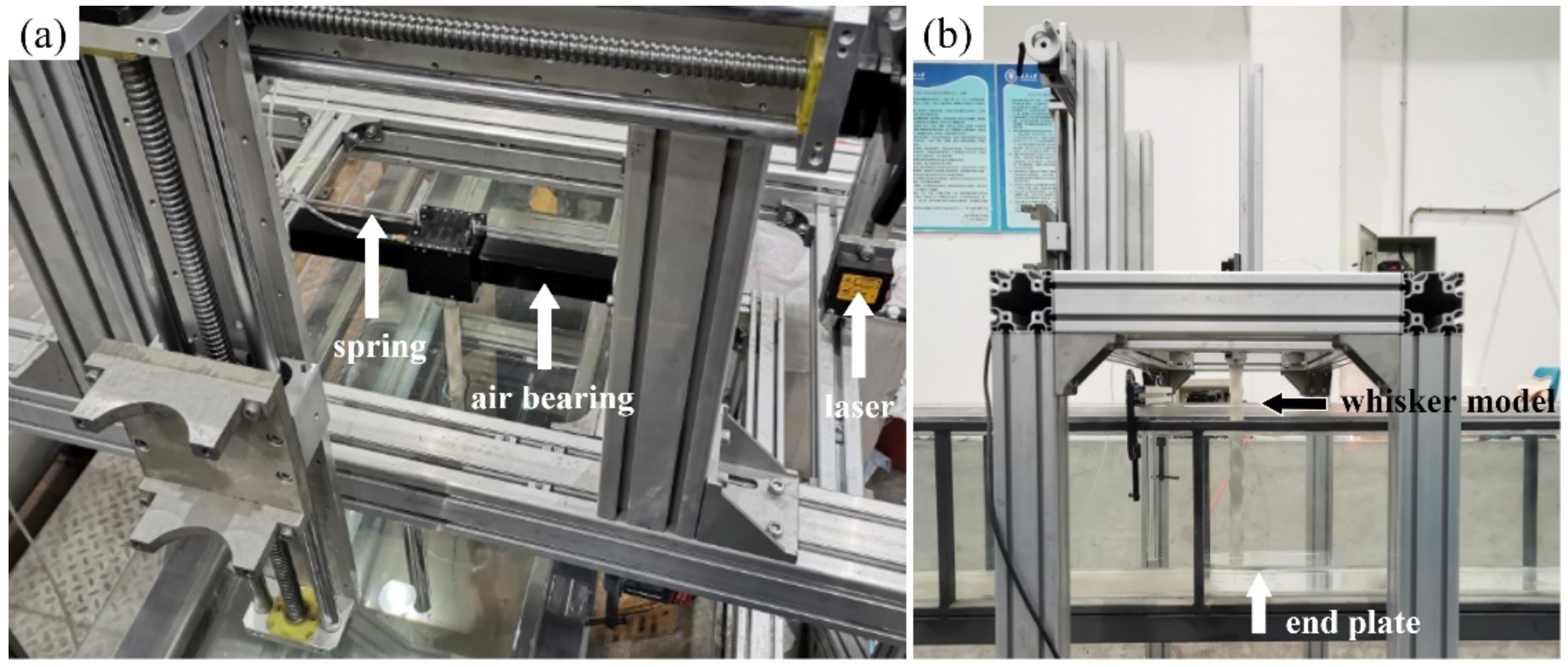
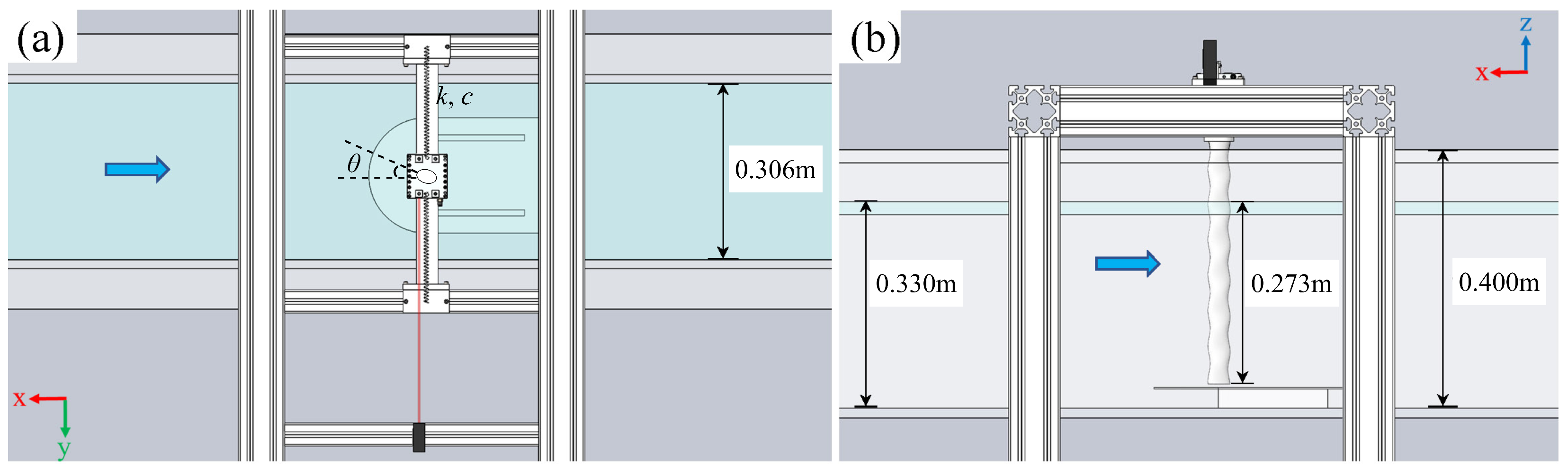
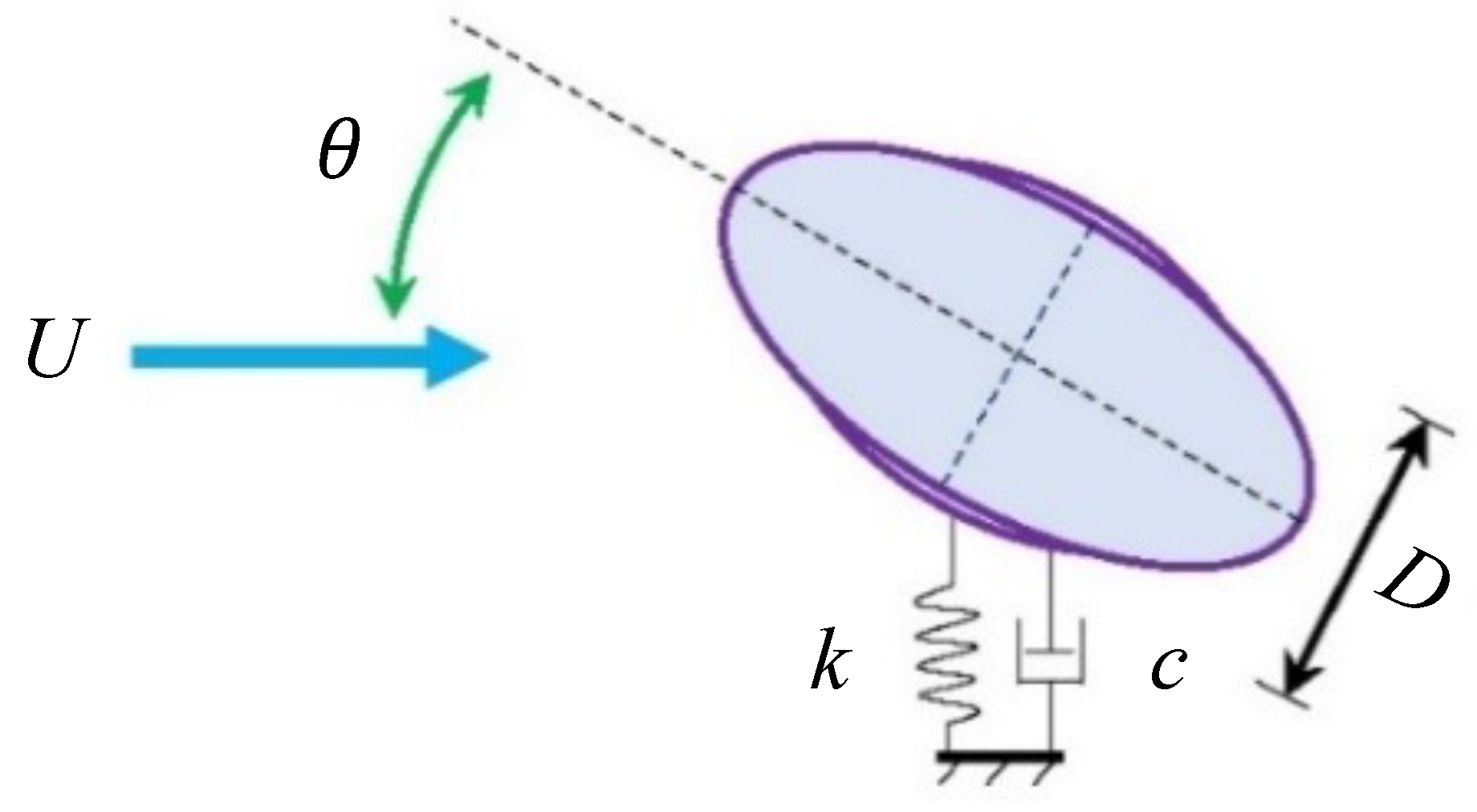
2.1. Experimental Apparatus
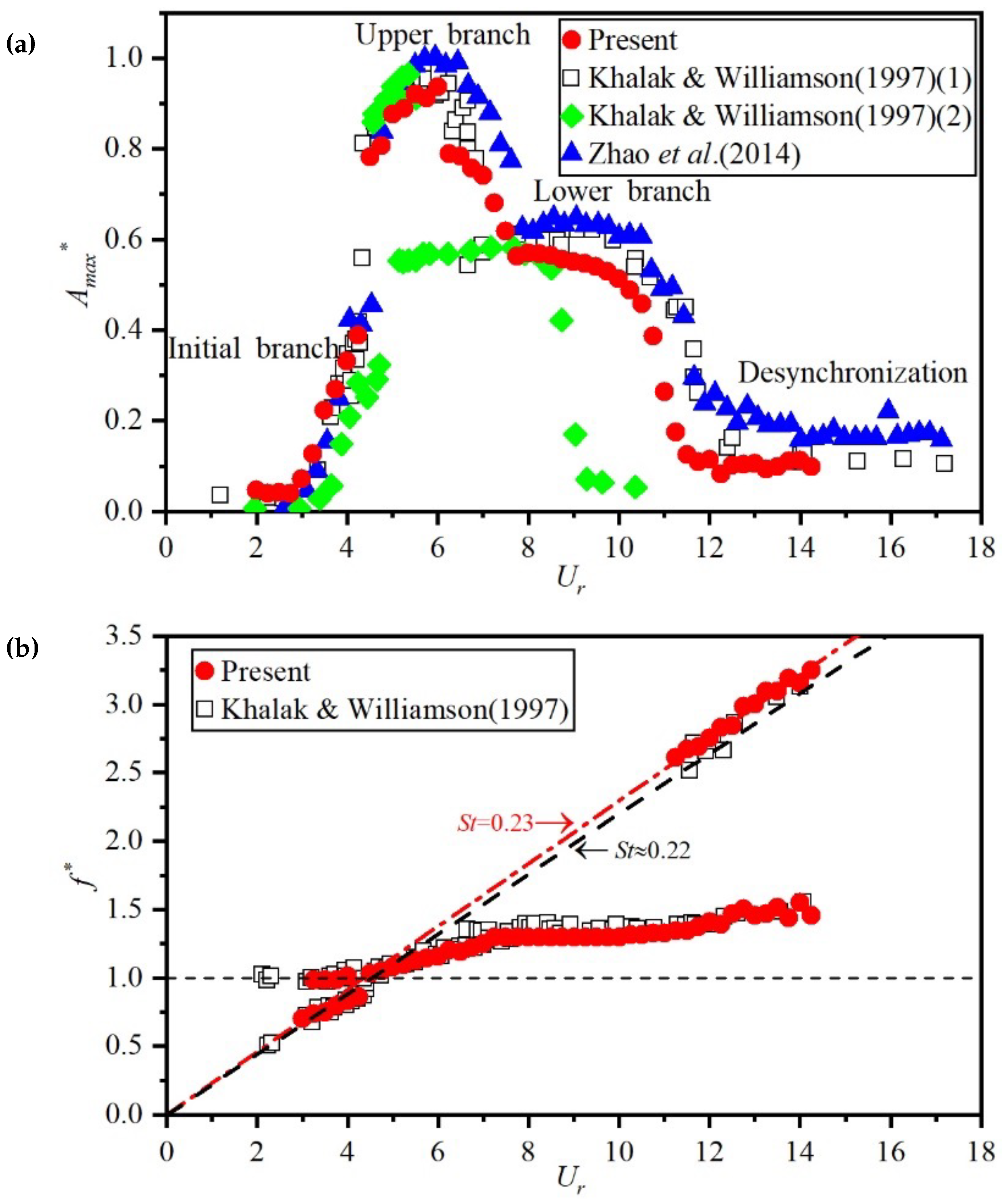
2.2. Verification of Experimental Setup
2.3. Whisker Model
3. Results and Discussions
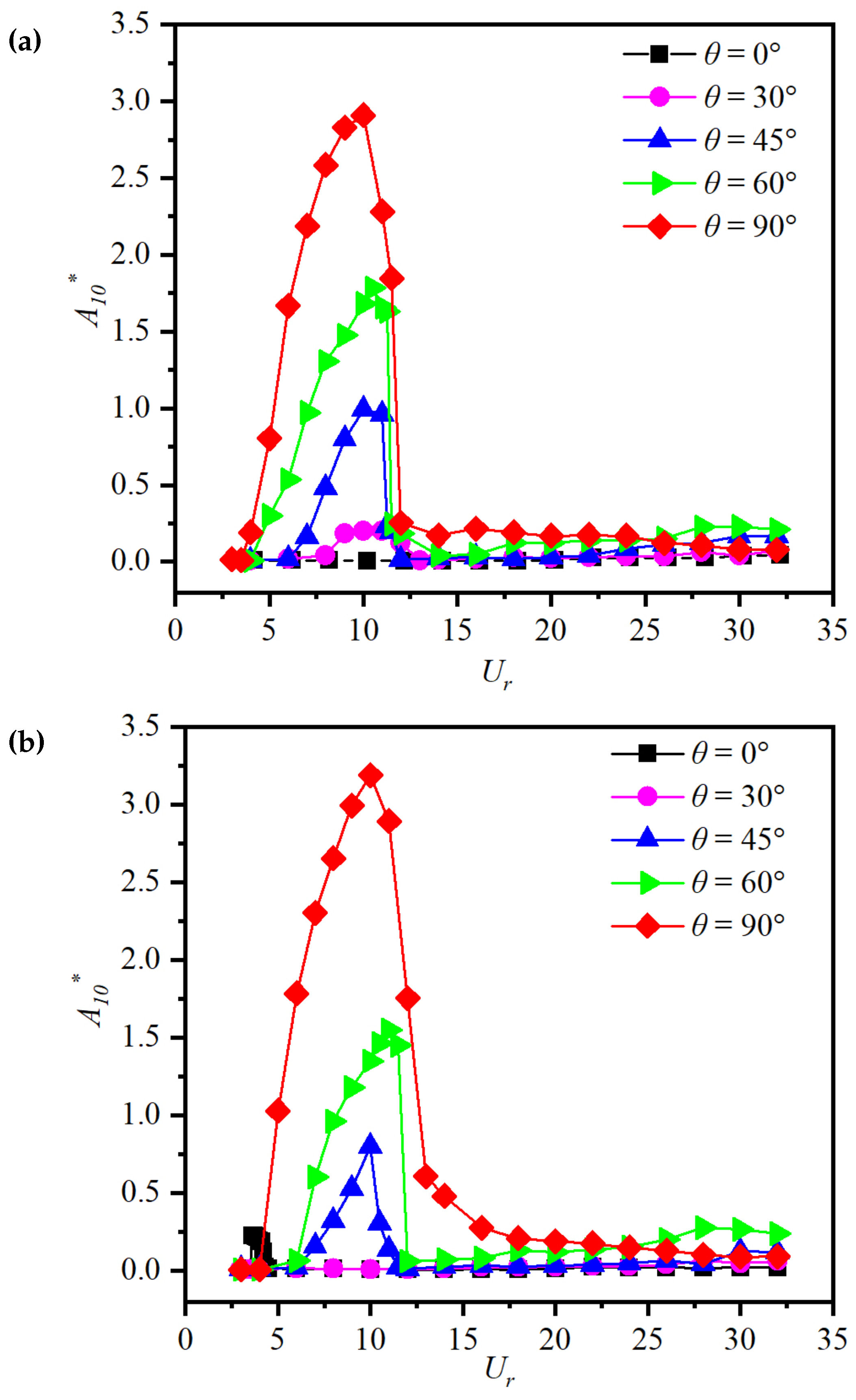
3.1. Vibration Amplitude
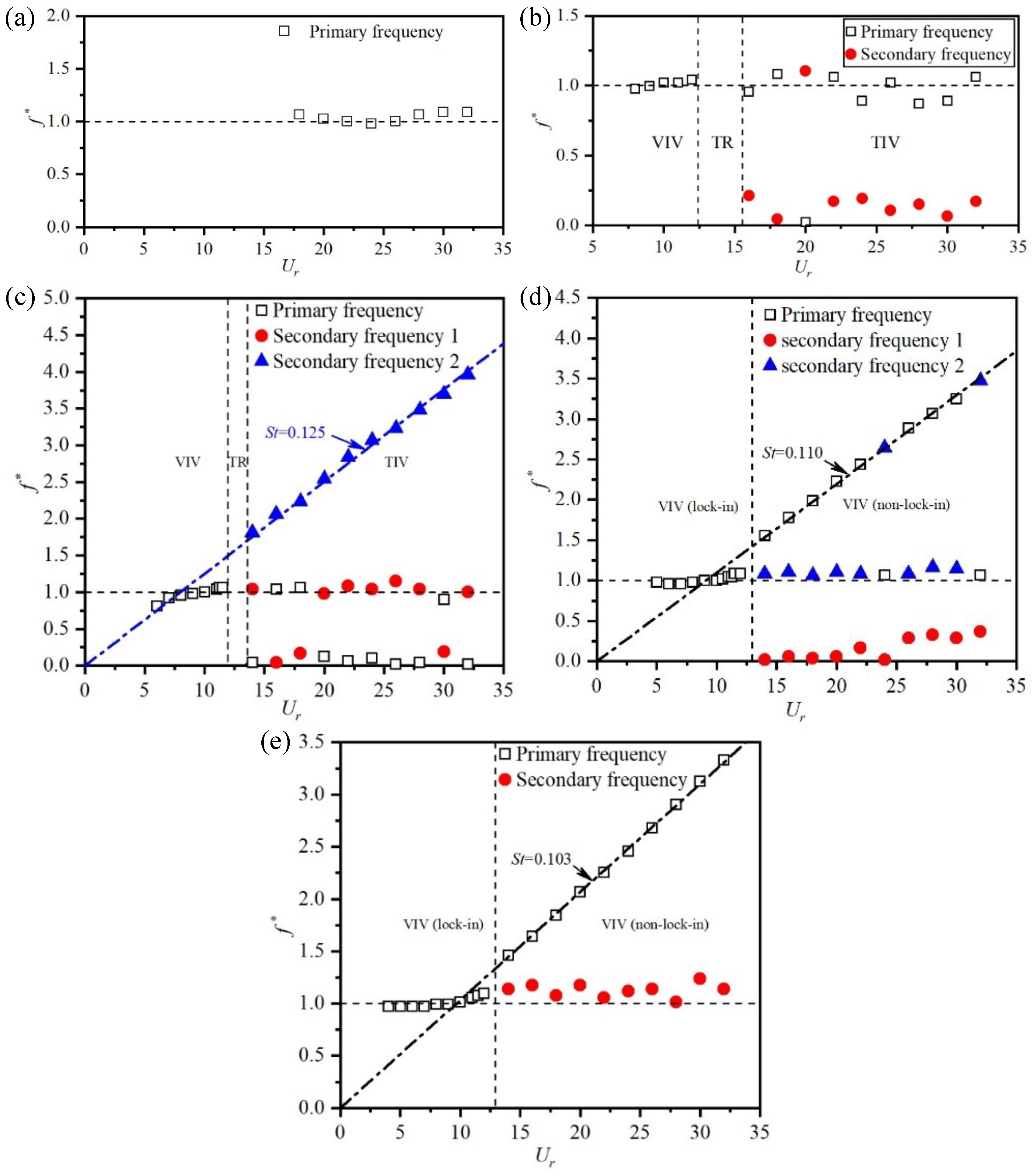
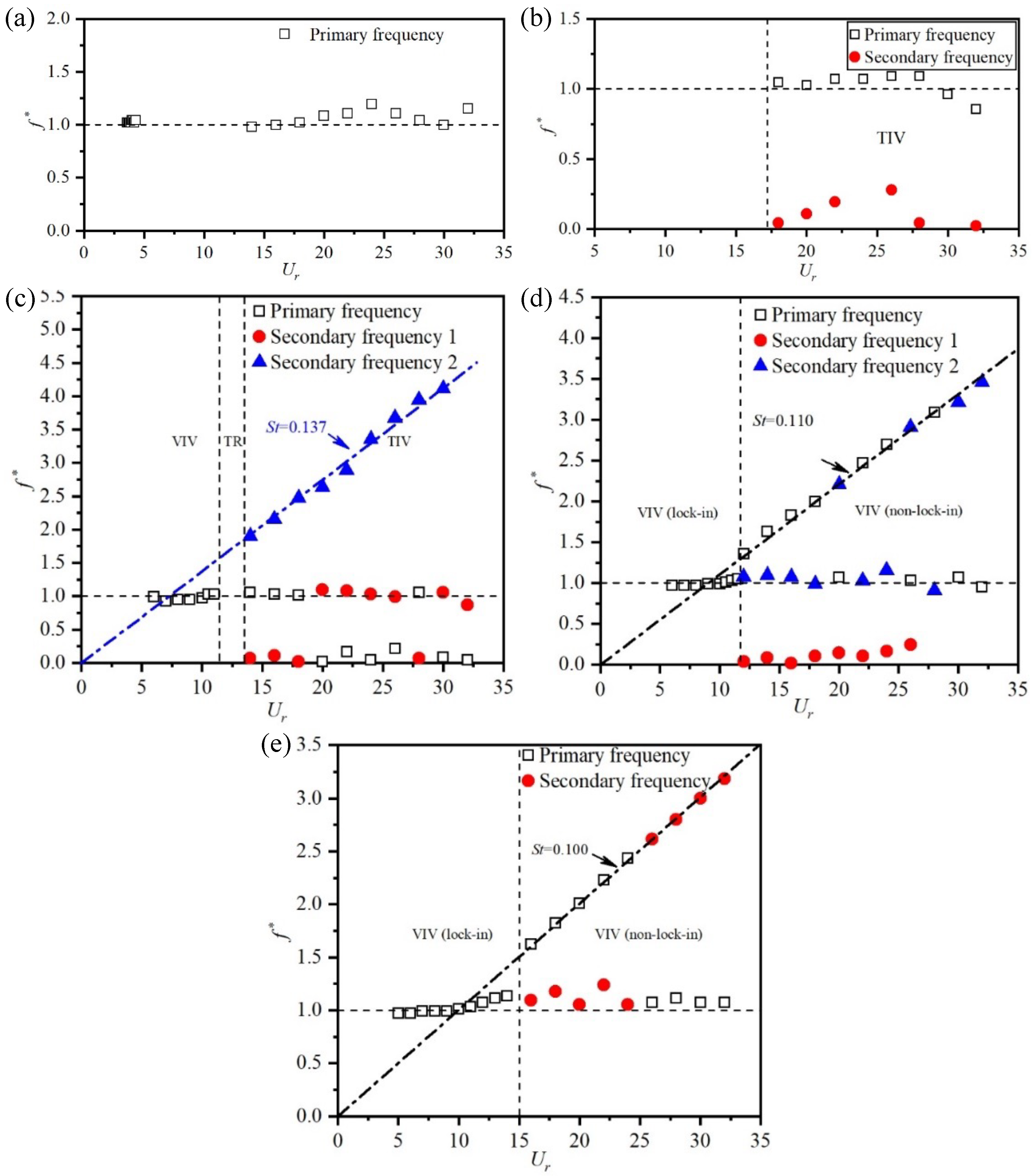
3.2. Vibration Frequency
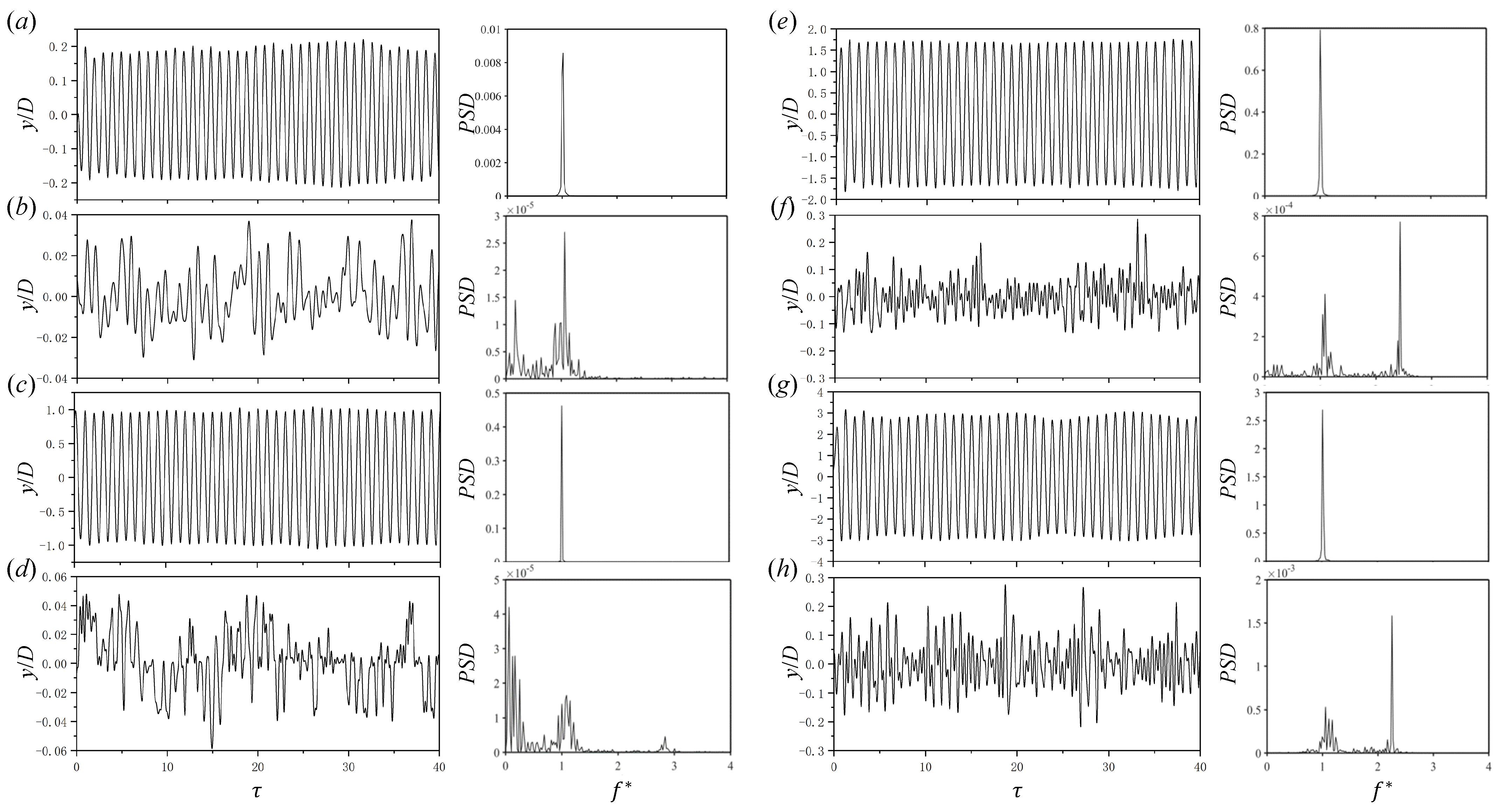
3.3. Displacement Time History and Vibration Spectra
4. Conclusions
- The vibration amplitude of the whisker model increases continuously with the angle of attack, reaching a maximum of = 2.9 at = 90.
- As the angle of attack increases, the reduced velocity at which the whisker model begins to vibrate decreases, and the lock-in regime range expands.
- The vibration response of the elliptical cylinder is similar to that of the whisker model under various angle-of-attack conditions, except at = 0 and 30.
- For = 30 and 45, the vibration response of the whisker model undergoes three vibration regimes as the reduced velocity increases: VIV, TR, and TIV.
- At = 60 and 90, the TR and TIV regimes disappear, and the vibration response of the whisker model is dominated by VIV.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Watkins, W.A.; Wartzok, D. Sensory biophysics of marine mammals. Mar. Mammal Sci. 1985, 1, 219–260. [Google Scholar] [CrossRef]
- Dehnhardt, G.; Kaminski, A. Sensitivity of the mystacial vibrissae of harbour seals (Phoca vitulina) for size differences of actively touched objects. J. Exp. Biol. 1995, 198, 2317–2323. [Google Scholar] [CrossRef]
- Dehnhardt, G.; Mauck, B.; Bleckmann, H. Seal whiskers detect water movements. Nature 1998, 394, 235–236. [Google Scholar] [CrossRef]
- Dehnhardt, G.; Mauck, B.; Hanke, W.; Bleckmann, H. Hydrodynamic trail-following in harbor seals (Phoca vitulina). Science 2001, 293, 102–104. [Google Scholar] [CrossRef]
- Wieskotten, S.; Dehnhardt, G.; Mauck, B.; Miersch, L.; Hanke, W. Hydrodynamic determination of the moving direction of an artificial fin by a harbour seal (Phoca vitulina). J. Exp. Biol. 2010, 213, 2194–2200. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schulte-Pelkum, N.; Wieskotten, S.; Hanke, W.; Dehnhardt, G.; Mauck, B. Tracking of biogenic hydrodynamic trails in harbour seals (Phoca vitulina). J. Exp. Biol. 2007, 210, 781–787. [Google Scholar] [CrossRef] [Green Version]
- Wieskotten, S.; Mauck, B.; Miersch, L.; Dehnhardt, G.; Hanke, W. Hydrodynamic discrimination of wakes caused by objects of different size or shape in a harbour seal (Phoca vitulina). J. Exp. Biol. 2011, 214, 1922–1930. [Google Scholar] [CrossRef] [Green Version]
- Hanke, W.; Witte, M.; Miersch, L.; Brede, M.; Oeffner, J.; Michael, M.; Hanke, F.; Leder, A.; Dehnhardt, G. Harbor seal vibrissa morphology suppresses vortex-induced vibrations. J. Exp. Biol. 2010, 213, 2665–2672. [Google Scholar] [CrossRef] [Green Version]
- Beem, H.R.; Triantafyllou, M.S. Wake-induced ‘slaloming’response explains exquisite sensitivity of seal whisker-like sensors. J. Fluid Mech. 2015, 783, 306–322. [Google Scholar] [CrossRef] [Green Version]
- Bunjevac, J.; Turk, J.; Rinehart, A.; Zhang, W. Wake induced by an undulating elephant seal whisker. J. Vis. 2018, 21, 597–612. [Google Scholar] [CrossRef]
- Hans, H.; Miao, J.; Weymouth, G.; Triantafyllou, M. Whisker-like geometries and their force reduction properties. In Proceedings of the 2013 MTS/IEEE OCEANS-Bergen, Bergen, Norway, 10–14 June 2013; pp. 1–7. [Google Scholar]
- Wang, S.; Liu, Y. Wake dynamics behind a seal-vibrissa-shaped cylinder: A comparative study by time-resolved particle velocimetry measurements. Exp. Fluids 2016, 57, 1–20. [Google Scholar] [CrossRef]
- Gläser, N.; Wieskotten, S.; Otter, C.; Dehnhardt, G.; Hanke, W. Hydrodynamic trail following in a California sea lion (Zalophus californianus). J. Comp. Physiol. A 2011, 197, 141–151. [Google Scholar] [CrossRef]
- Murphy, C.T.; Eberhardt, W.C.; Calhoun, B.H.; Mann, K.A.; Mann, D.A. Effect of angle on flow-induced vibrations of pinniped vibrissae. PLoS ONE 2013, 8, e69872. [Google Scholar] [CrossRef] [Green Version]
- Hans, H.; Miao, J.; Triantafyllou, M. Characterization of von Kármán street with seal whisker-like sensor. In Proceedings of the SENSORS, Taipei, Taiwan, 28–31 October 2012; pp. 1–4. [Google Scholar]
- y Alvarado, P.V.; Subramaniam, V.; Triantafyllou, M. Design of a bio-inspired whisker sensor for underwater applications. In Proceedings of the SENSORS, Taipei, Taiwan, 28–31 October 2012; pp. 1–4. [Google Scholar]
- Beem, H.; Hildner, M.; Triantafyllou, M. Calibration and validation of a harbor seal whisker-inspired flow sensor. Smart Mater. Struct. 2012, 22, 014012. [Google Scholar] [CrossRef]
- Beem, H.; Hildner, M.; Triantafyllou, M. Characterization of a harbor seal whisker-inspired flow sensor. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–4. [Google Scholar]
- Wang, S.; Liu, Y.Z. Flow structures behind a vibrissa-shaped cylinder at different angles of attack: Complication on vortex-induced vibration. Int. J. Heat Fluid Flow 2017, 68, 31–52. [Google Scholar] [CrossRef]
- Kim, H.; Yoon, H.S. Effect of the orientation of the harbor seal vibrissa based biomimetic cylinder on hydrodynamic forces and vortex induced frequency. AIP Adv. 2017, 7, 105015. [Google Scholar] [CrossRef] [Green Version]
- Zheng, X.; Kamat, A.M.; Cao, M.; Kottapalli, A.G.P. Creating underwater vision through wavy whiskers: A review of the flow-sensing mechanisms and biomimetic potential of seal whiskers. J. R. Soc. Interface 2021, 18, 20210629. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Shan, X.; Xie, T.; Miao, J.; Du, H.; Song, R. Harbor seal whisker inspired self-powered piezoelectric sensor for detecting the underwater flow angle of attack and velocity. Measurement 2021, 172, 108866. [Google Scholar] [CrossRef]
- Zheng, X.; Kamat, A.M.; Cao, M.; Kottapalli, A.G.P. Natural Frequency Measurements of Seal Whiskers Using A 3D-Printed MEMS Graphene-Based Cantilever Sensor. In Proceedings of the 2022 IEEE 35th International Conference on Micro Electro Mechanical Systems Conference (MEMS), Tokyo, Japan, 9–13 January 2022; pp. 714–717. [Google Scholar]
- Zheng, X.; Kamat, A.M.; Cao, M.; Kottapalli, A.G.P. Wavy Whiskers in Wakes: Explaining the Trail-Tracking Capabilities of Whisker Arrays on Seal Muzzles. Adv. Sci. 2023, 10, 2203062. [Google Scholar] [CrossRef] [PubMed]
- Khalak, A.; Williamson, C. Fluid forces and dynamics of a hydroelastic structure with very low mass and damping. J. Fluids Struct. 1997, 11, 973–982. [Google Scholar] [CrossRef]
- Zhao, J.; Leontini, J.S.; Jacono, D.L.; Sheridan, J. Fluid–structure interaction of a square cylinder at different angles of attack. J. Fluid Mech. 2014, 747, 688–721. [Google Scholar] [CrossRef]
- Zhao, J.; Hourigan, K.; Thompson, M.C. Dynamic response of elliptical cylinders undergoing transverse flow-induced vibration. J. Fluids Struct. 2019, 89, 123–131. [Google Scholar] [CrossRef]
- Hanke, W.; Wieskotten, S.; Marshall, C.; Dehnhardt, G. Hydrodynamic perception in true seals (Phocidae) and eared seals (Otariidae). J. Comp. Physiol. A 2013, 199, 421–440. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Present | K&W(1) | K&W(2) | Zhao et al. [26] | |
|---|---|---|---|---|
| 2.67 | 2.4 | 10.1 | 2.4 | |
| 5.08 | 4.50 | 1.34 | 2.91 |
| = 0 | = 30 | = 45 | = 60 | = 90 | |
|---|---|---|---|---|---|
| The whisker model | 0.767 | 0.785 | 0.799 | 0.815 | 0.821 |
| The elliptical cylinder | 0.769 | 0.779 | 0.790 | 0.809 | 0.822 |
| = 45 | = 60 | = 90 | |
|---|---|---|---|
| The whisker model | 0.125 | 0.110 | 0.103 |
| The elliptical cylinder | 0.137 | 0.110 | 0.100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Y.; Ji, C.; Yuan, D.; Song, L.; Xu, D. Experimental Study on the Effect of the Angle of Attack on the Flow-Induced Vibration of a Harbor Seal’s Whisker. Fluids 2023, 8, 206. https://doi.org/10.3390/fluids8070206
Wei Y, Ji C, Yuan D, Song L, Xu D. Experimental Study on the Effect of the Angle of Attack on the Flow-Induced Vibration of a Harbor Seal’s Whisker. Fluids. 2023; 8(7):206. https://doi.org/10.3390/fluids8070206
Chicago/Turabian StyleWei, Yuhan, Chunning Ji, Dekui Yuan, Liqun Song, and Dong Xu. 2023. "Experimental Study on the Effect of the Angle of Attack on the Flow-Induced Vibration of a Harbor Seal’s Whisker" Fluids 8, no. 7: 206. https://doi.org/10.3390/fluids8070206