
A Study on the Effectiveness of SCD Seeding Fog Dissipation Mechanism Using LiDAR Sensor
Abstract
:1. Introduction
2. Artificial Fog Dissipation Technique
2.1. Fog Dissipation Technology with Cooling Material
2.2. Fog Dissipation Technology with Evaporation
2.3. Fog Dissipation Technology with Hygroscopic Droplets Seeding
3. Experiment
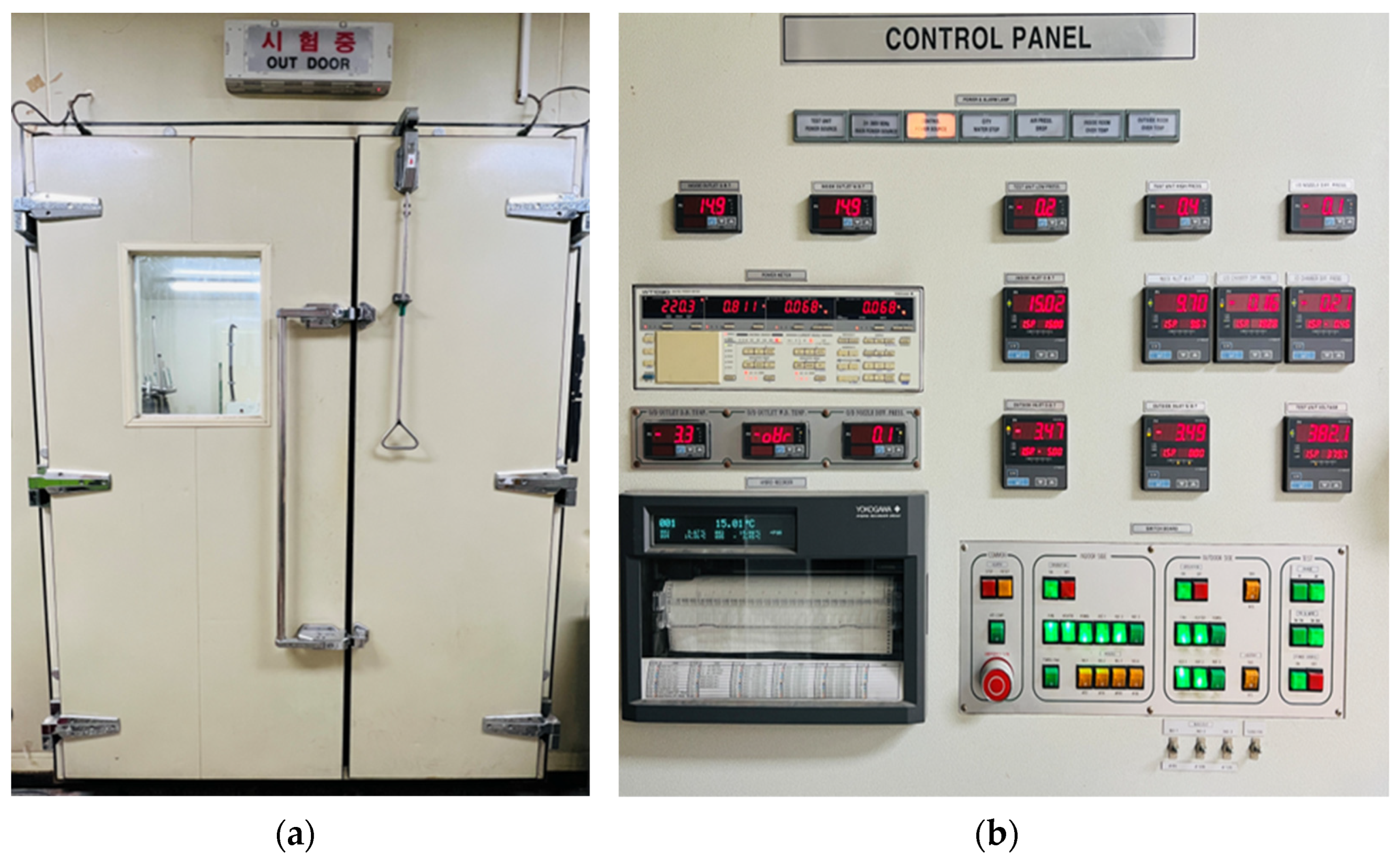
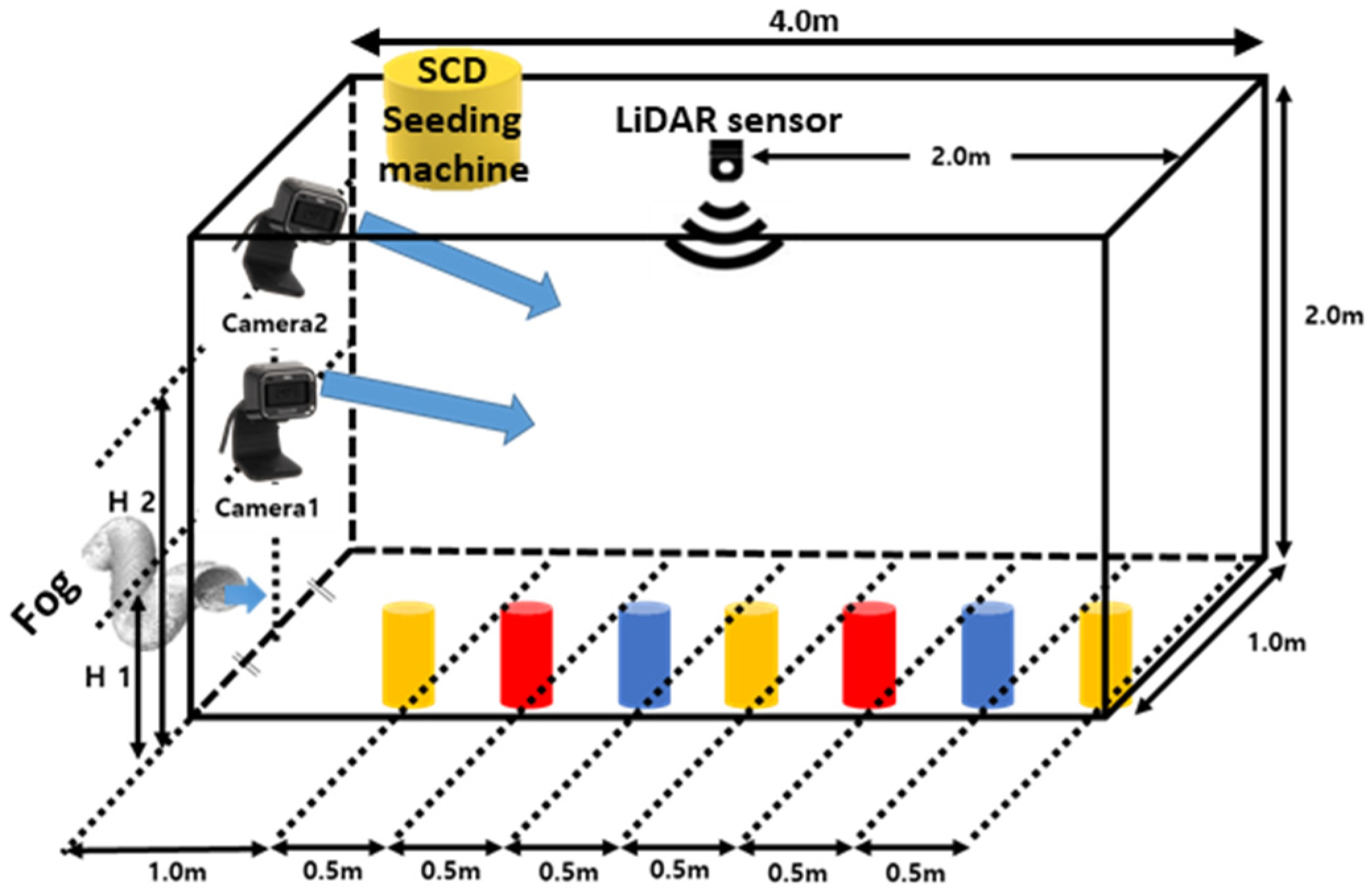
3.1. Experimental Apparatus
3.2. Experimental Procedure
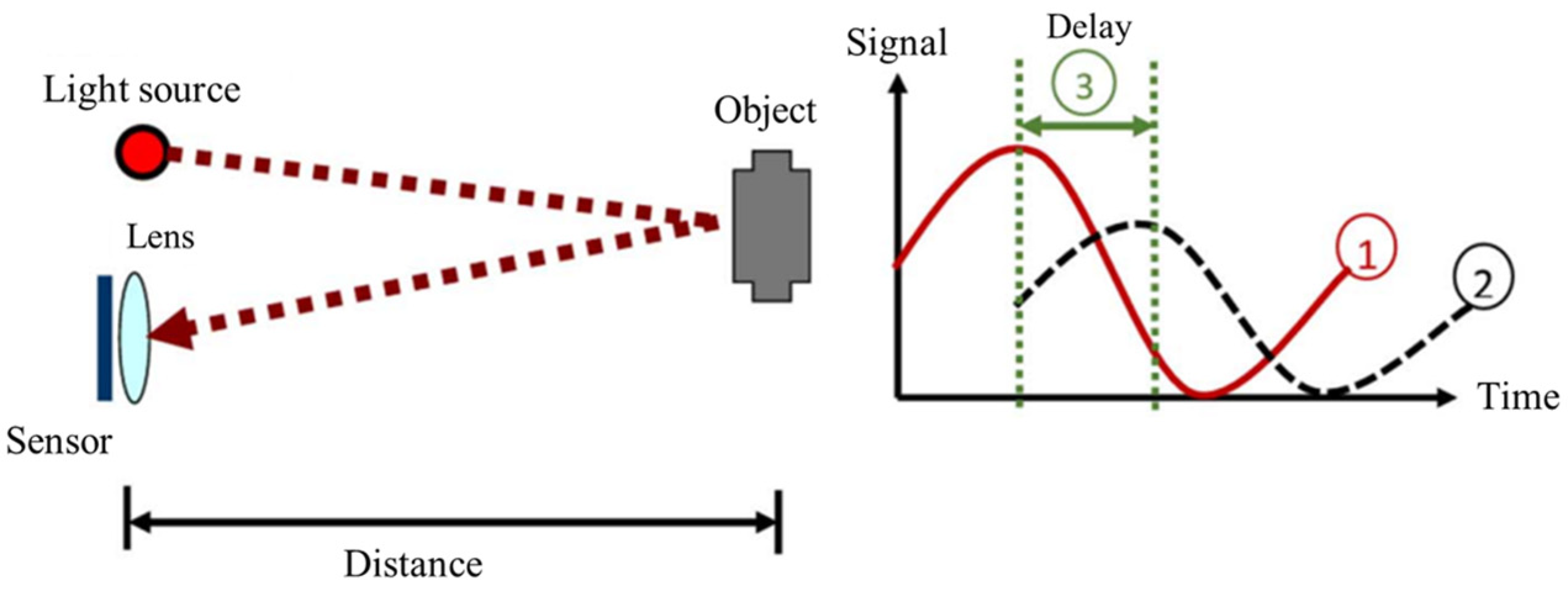
3.3. Method of Data Analysis
4. Results and Discussion
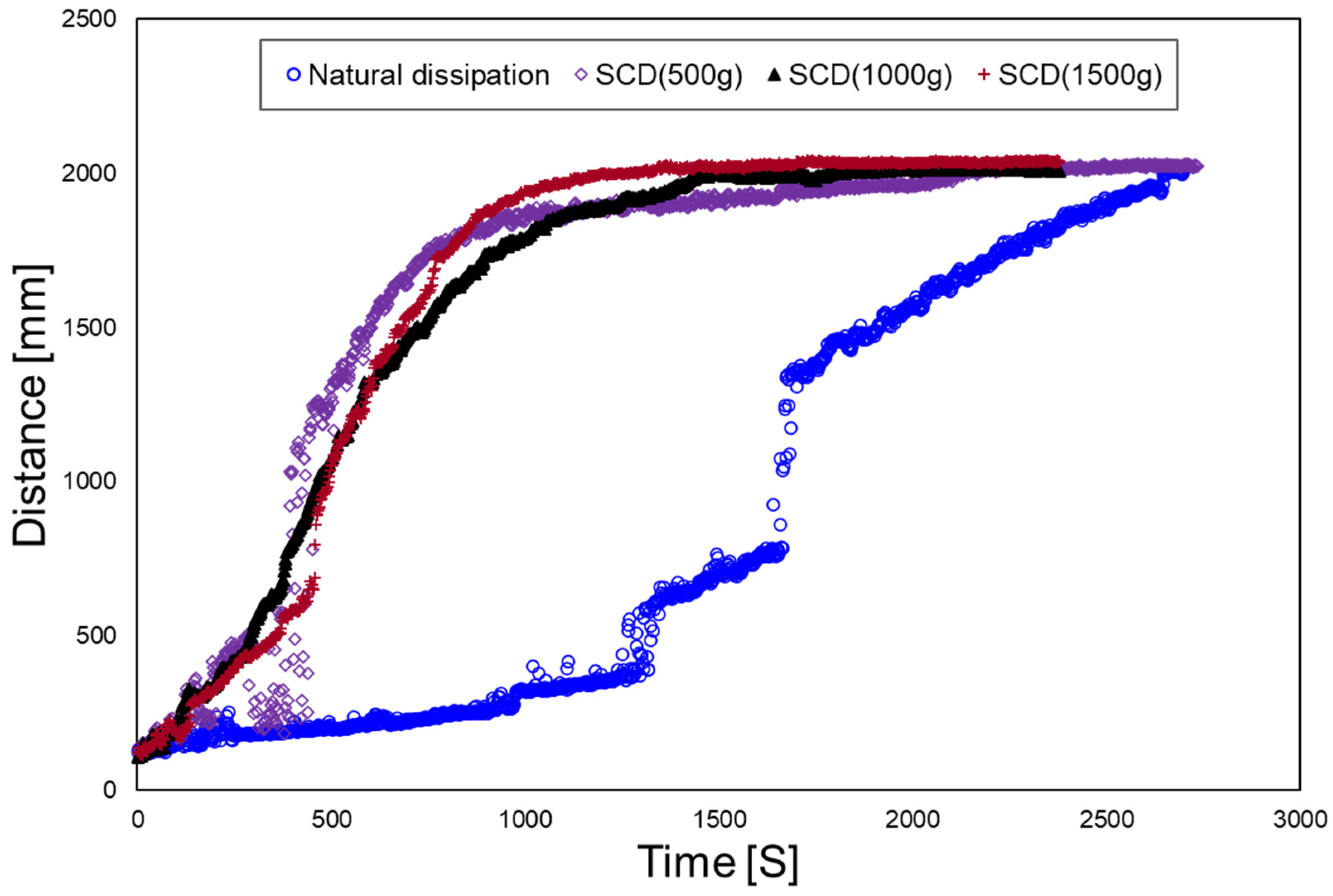
4.1. Results of LiDAR Sensor Experiment
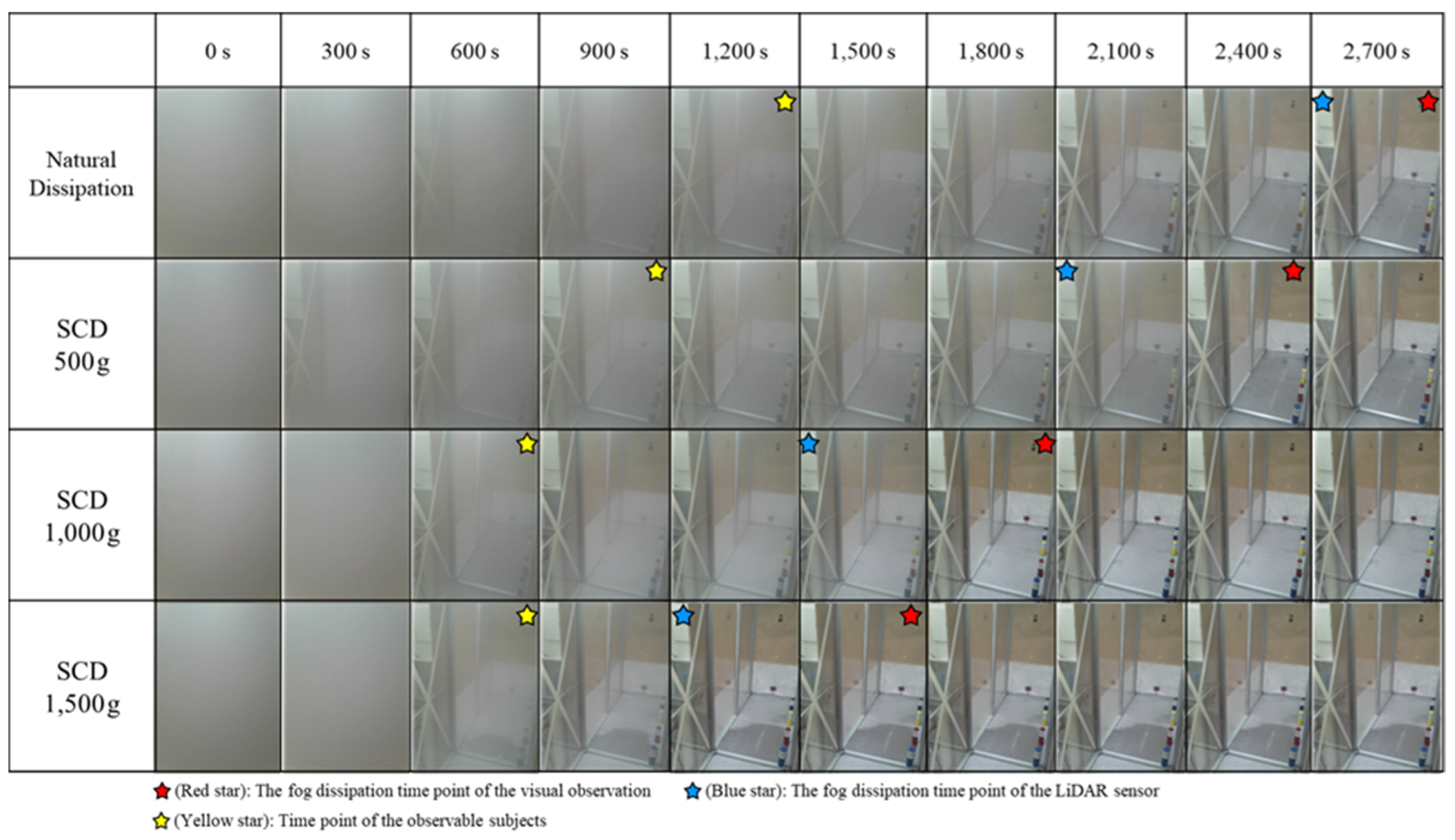
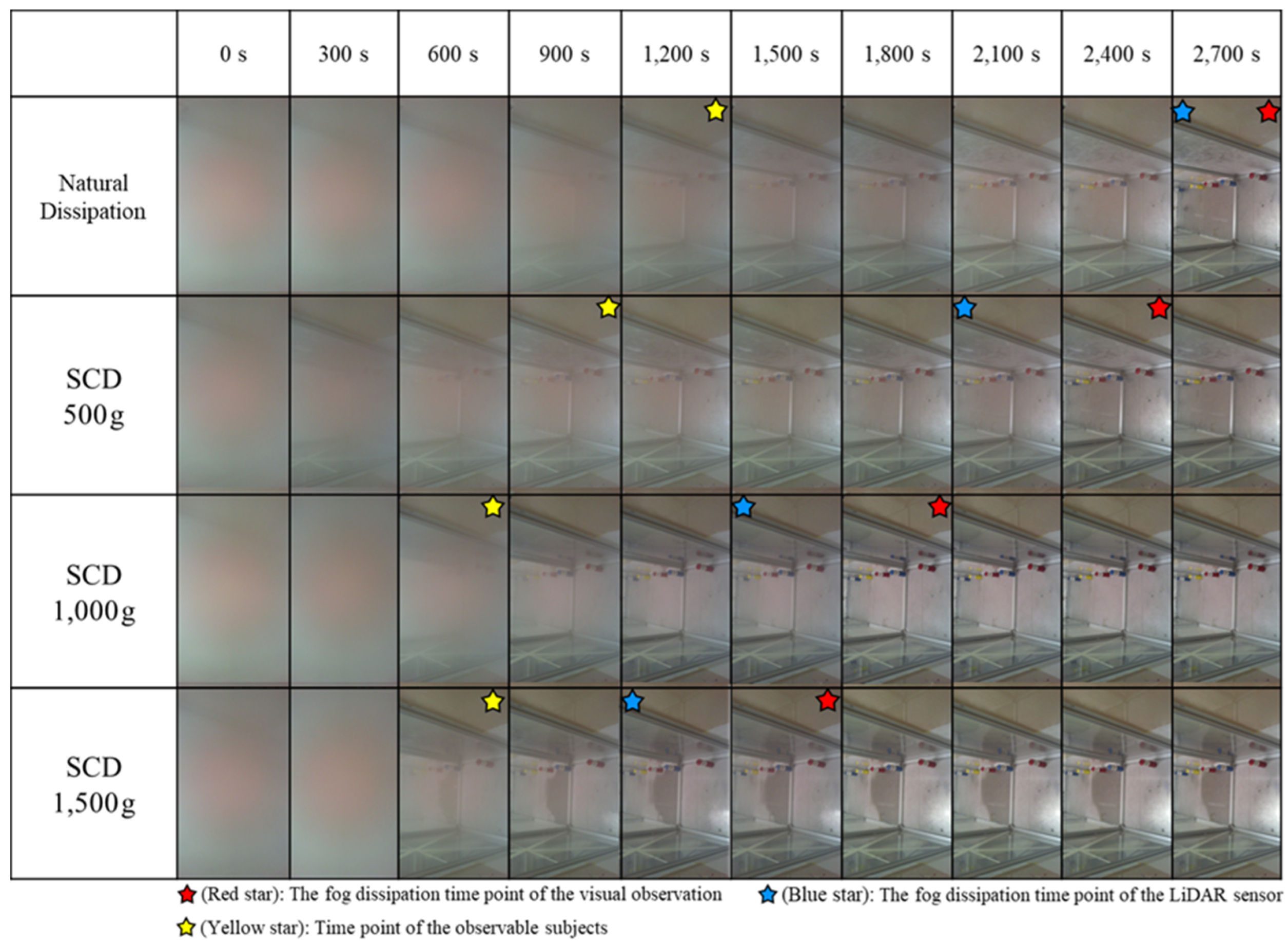
4.2. Results of Camera Experiment
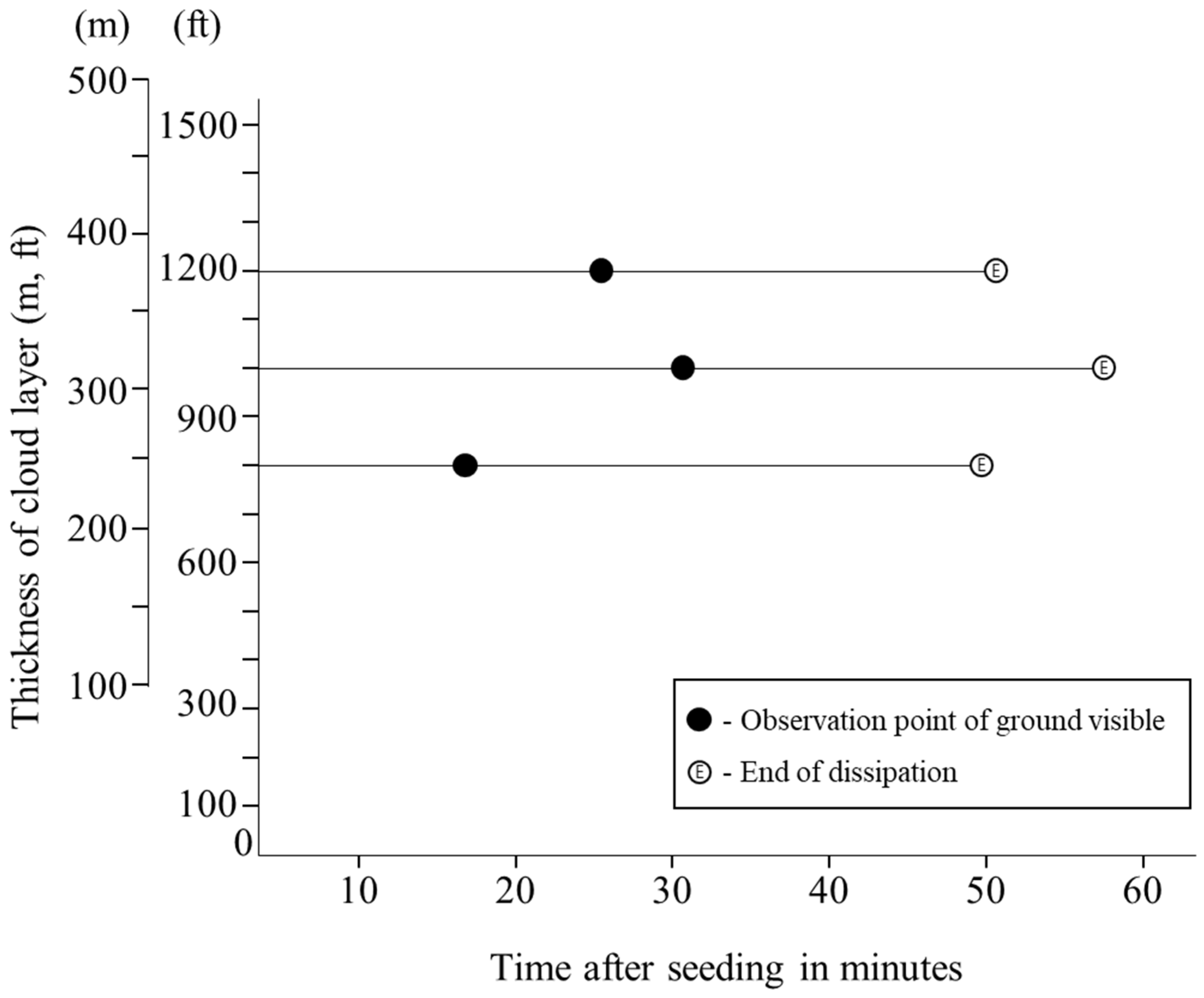
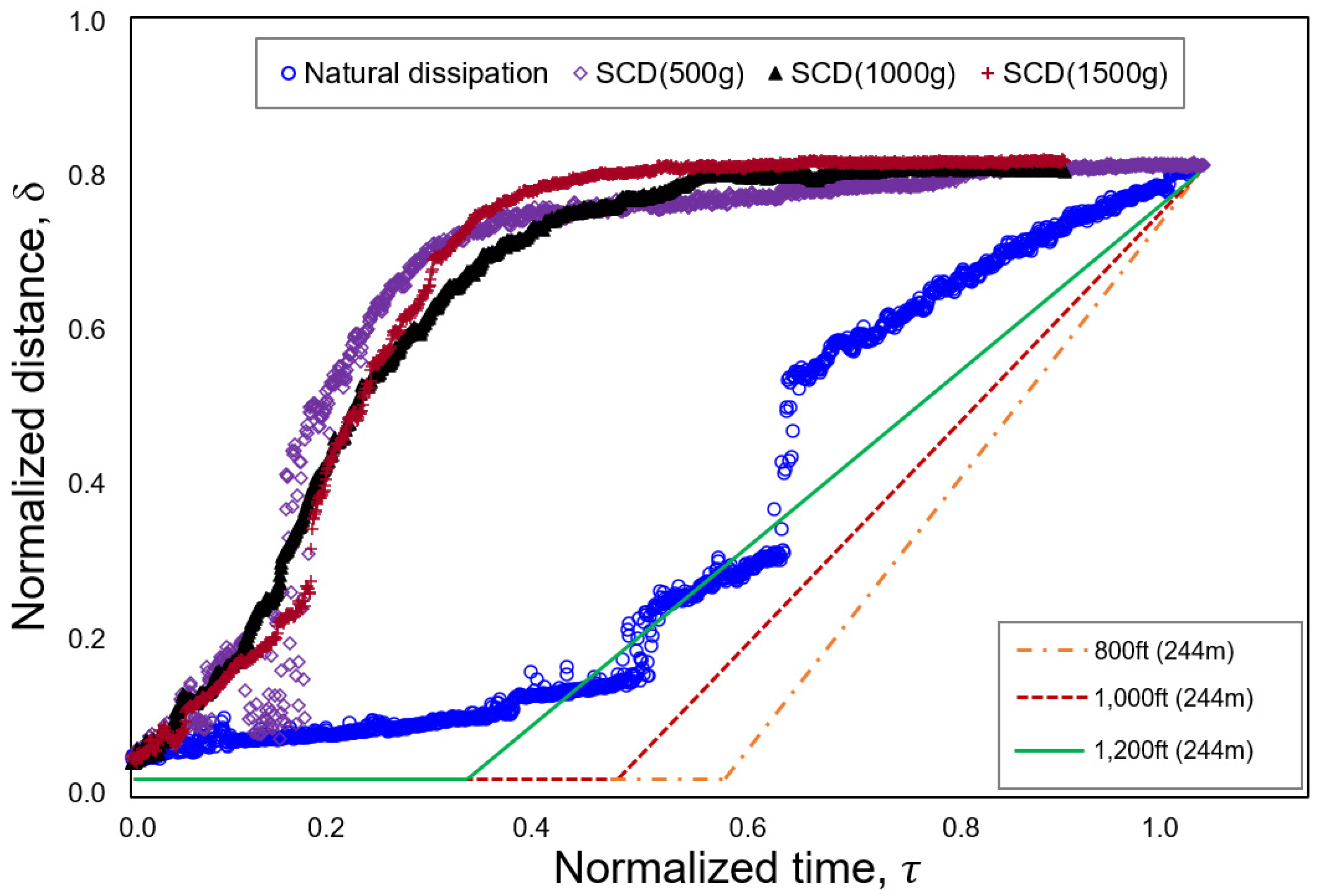
4.3. Verification
5. Conclusions
- Based on the results of the distance measurement data of the LiDAR sensor, it was confirmed that the effect of increasing the weight of SCD seeding and improving visibility was proportional, although non-directly proportional. Due to the space limitations of the lab-scale chamber, it was determined that the energy conversion was limited. Therefore, further studies are needed to optimize the amount of suitable SCD for fog dissipation in different sized spaces.
- Using LiDAR sensor measurement results and camera images, the tendency of the fog dissipation method with natural and SCD seeding dissipation was analyzed. As a consequence, the similarities between the LiDAR sensor distance measurement and the camera result were validated. As a consequence, the effect of SCD seeding on improving visibility when compared to natural dissipation under cold fog conditions was proven based on LiDAR sensor distance data and camera images.
- It is considered that the results of this study are available as basic data for developing new fog dissipation technology.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bang, C.H.; Lee, J.W.; Hong, S.Y. Predictability experiments of fog and visibility in local airports over Korea using the WRF model. J. Korean Soc. Atmos. Environ. 2008, 24, 92–101. [Google Scholar]
- Gultepe, I.; Tardif, R.; Michaelides, S.C.; Cermak, J.; Bott, A.; Bendix, J.; Müller, M.D.; Pagowski, M.; Hansen, B.; Ellrod, G.; et al. Fog research: A review of past achievements and future perspectives. Pure Appl. Geophys. 2007, 164, 1121–1159. [Google Scholar] [CrossRef]
- Niu, S.J.; Liu, D.Y.; Zhao, L.J.; Lu, C.S.; Lü, J.J.; Yang, J. Summary of a 4-year fog field study in northern Nanjing, Part 2: Fog microphysics. Pure Appl. Geophys. 2012, 169, 1137–1155. [Google Scholar] [CrossRef]
- Lee, Y.K.; Choi, J.S. A study on development of fog dissipating system using dry air. In Proceedings of the KAIS Fall Conference; Jeonbuk National University: Jeonju, Republic of Korea, 2011; pp. 276–279. [Google Scholar]
- Elbing, F.; Möller, D.; Ulbricht, M. Fog Dissipation by SCD Blasting: Technology and Applications. In Proceedings of the 2nd International Conference on Fog and Fog Coll, St. John’s, NL, Canada; 2011; pp. 485–488. [Google Scholar]
- Möller, D.; Wieprecht, W.; Hofmeister, J. Fog Dissipation by SCD Blasting: Process Mechanism. In Proceedings of the 2nd International Conference on Fog and Fog Coll, St. John’s, NL, Canada; 2011; pp. 489–491. [Google Scholar]
- Beckwith, W.B. Supercooled Fog Dispersal for Airport Operations. Bull. Am. Meteorol. Soc. 2011, 46, 323–327. [Google Scholar] [CrossRef] [Green Version]
- Kampe, H.J.; Kelly, J.J.; Weickmann, H.K. Seeding experiments in subcooled stratus clouds. In Cloud and Weather Modification; American Meteorological Society: Boston, MA, USA, 1957; pp. 86–111. [Google Scholar]
- Jung, J.I.; Kyu, S.S.; Park, Y.S.; Lee, S.Y.; Yang, H.Y. Verification of Corrective Improvement Effect of Cloud (Fog) Control Experiments by Hygroscopic Substances. In Proceedings of KOMES Spring Conference; Kyungpook National University: Daegu, Republic of Korea, 2014; pp. 176–177. [Google Scholar]
- Kim, T.Y.; Park, G.W.; Kang, H.G.; Lee, S.H. A Prediction for Fog Dissipation Using Artificial Neural Network. In Proceedings of KIISE, Fall Conference; Chung-Ang University: Seoul, Republic of Korea; Volume 35, pp. 316–319.
- Holmstrom, M.; Liu, D.; Vo, C. Machine Learning applied to Weather Forecasting. Meteorol. Appl. 2016, 10, 1–5. [Google Scholar]
- Choi, S.; Kim, Y.J.; Briceno, S.; Mavris, D. Prediction of Weather-induced Airline Delays based on Machine Learning Algorithms. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–29 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Sravanthi, N.; Venkat, M.L.; Harshini, S.; Ashesh, K. An ensemble Approach to Predict Weather Forecast Using Machine Learning. In Proceedings of the 2020 International Conference on Smart Electronics and Communication (ICOSEC), Trichy, India, 10–12 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 436–440. [Google Scholar]
- Schultz, M.G.; Betancourt, C.; Gong, B.; Kleinert, F.; Langguth, M.; Leufen, L.H.; Mozaffari, A.; Stadtler, S. Can Deep Learning Beat Numerical Weather Prediction? Philos. Trans. R. Soc. A 2021, 379, 2194. [Google Scholar] [CrossRef]
- Gusmão, G.F.; Barbosa, C.R.H.; Raposo, A.B. Development and Validation of LiDAR sensor Simulators based on Parallel Raycasting. Sensors 2020, 20, 7186. [Google Scholar] [CrossRef] [PubMed]
- Hahner, M.; Sakaridis, C.; Dai, D.; Van Gool, L. Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather. In Proceedings of the IEEE/CVF International Conference on Computer Vistion, Nashville, TN, USA, 20–25 June 2021; pp. 15283–15292. [Google Scholar]
- Li, Y.; Duthon, P.; Colomb, M.; Ibanez-Guzman, J. What Happens for a ToF LiDAR in Fog? IEEE Trans. Intell. Transp. Syst. 2020, 22, 6670–6681. [Google Scholar] [CrossRef]
- Findeisen, W.; Volken, E.; Giesche, A.M.; Brönnimann, S. Colloidal meteorological processes in the formation of precipitation. Meteorol. Z. 2015, 24, 443–454. [Google Scholar] [CrossRef]
- Song, T.L.; Xing, X.H.; Yang, Y.; Li, X.D.; Yang, R.J. Study on the Effect of Sodium Polyacrylate and its Compounds on Artificial Warm Fog Dissipation. In Advanced Materials Research; Trans Tech Publications Ltd.: Bäch, Switzerland, 2014; Volume 1052, pp. 226–230. [Google Scholar]
- Bamji, C.S.; O’Connor, P.; Elkhatib, T.; Mehta, S.; Thompson, B.; Prather, L.A.; Snow, D.; Akkaya, O.C.; Daniel, A.; Payne, A.D.; et al. A 0.13 μm CMOS System-on-chip for a 512 × 424 Time-of-Flight Image Sensor with Multi-frequency Photo-demodulation up to 130 MHz and 2 GS/s ADC. IEEE J. Solid-State Circuits 2014, 50, 303–319. [Google Scholar] [CrossRef]
- Momma, E.; Nakano, S.; Ono, T.; Okayasu, K.; Nemoto, M.; Ebata, H.; Mammoto, A. Detection of Fog and Smoke Particles with Discrete near Infrared Light. Electron. Commun. Jpn. 2018, 101, 3–9. [Google Scholar] [CrossRef]
- Liu, J.; Sun, Q.; Fan, Z.; Jia, Y. TOF Lidar Development in Autonomous Vehicle. In Proceedings of the 2018 IEEE 3rd Optoelectronics Global Conference (OGC), Shenzhen, China, 4–7 September 2018; pp. 185–190. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indoor | Outdoor | |
|---|---|---|
| Capacity (cooling) Capacity (heating) | 2000~15,000 kcal/h | |
| 2000~16,000 kcal/h | ||
| Range of hydrothermograph | 10~50 °C | −20~60 °C |
| 30~90% RH | 5~90% RH | |
| Range of air volume | 3~50 | 5.5~60 |
| Wind speed | 0.5 m/s | |
| Reproducibility | 2% | |
| Accuracy | 2% | |
| Air conditioner | 1 set | |
| 130 , 2.2 kW | ||
| Heater: 40 kW | ||
| Unit of refrigerator | 4 kW-1 set (Bitzer) | 5.5 kW-1 set (Bitzer) |
| 5.5 kW-2 set (Bitzer) Refrigerant: R-22 | 7.5 kW-2 set (Bitzer) Refrigerant: R-22 | |
| Detection Range (2D) | 200 mm~8000 mm |
| Measure | 1 mm |
| Distance accuracy | 1% |
| FOV (Field of view, ) | 0 < < 120 |
| Size (W D H) | 37.4 24.5 37.4 () |
| Weight | 28 g |
| Operating temperature | −10~50 °C |
| Natural dissipation | 1972.85 | 2701 |
| SCD (500 g) | 1969.75 | 2083 |
| SCD (1000 g) | 1951.68 | 1426 |
| SCD (1500 g) | 1973.65 | 1130 |
| SCD (500 g) | 0.553 | |
| SCD (1000 g) | 0.537 | |
| SCD (1500 g) | 0.469 | |
| Referenced paper [8] | 800 ft (244 m) | 0.660 |
| 1000 ft (305 m) | 0.431 | |
| 1200 ft (366 m) | 0.490 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, M.-G.; Kang, H.-S.; Kim, Y.-J. A Study on the Effectiveness of SCD Seeding Fog Dissipation Mechanism Using LiDAR Sensor. Fluids 2023, 8, 185. https://doi.org/10.3390/fluids8060185
Park M-G, Kang H-S, Kim Y-J. A Study on the Effectiveness of SCD Seeding Fog Dissipation Mechanism Using LiDAR Sensor. Fluids. 2023; 8(6):185. https://doi.org/10.3390/fluids8060185
Chicago/Turabian StylePark, Min-Gyun, Hyun-Su Kang, and Youn-Jea Kim. 2023. "A Study on the Effectiveness of SCD Seeding Fog Dissipation Mechanism Using LiDAR Sensor" Fluids 8, no. 6: 185. https://doi.org/10.3390/fluids8060185