1. Introduction
The exact measurement of mass flow of fluids is important in many branches of technology, for example, chemical, oil, and gas industries. It is needed to control processes and ensure safety, filling batches, inventory, and others. The Coriolis mass flow meter (CMF) is an accurate instrument, which is becoming increasingly important in various applications [
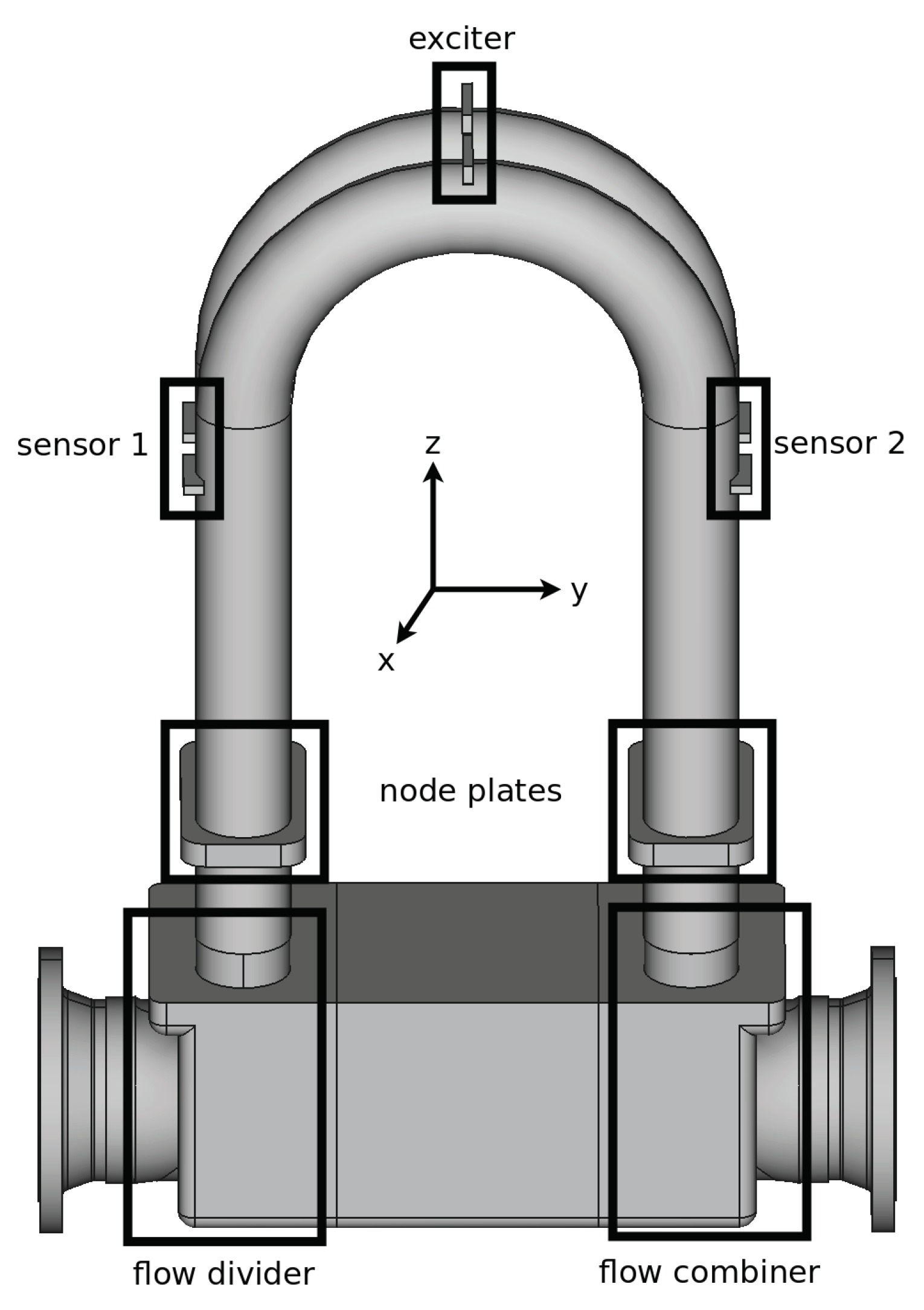
1]. It consists of one or multiple measuring tubes that are stimulated to vibrate by an electromagnetic pulse generator. The fluid to be investigated is directed through the tubes. Due to inertia, the Coriolis force causes a phase shift of the vibration, which is detected by sensors on both ends of the system. As the mass flow of the conveyed fluid is proportional to the Coriolis force, it can be determined directly.
CMFs have been widely described by analytical and structural models [
2,
3,
4,
5,
6,
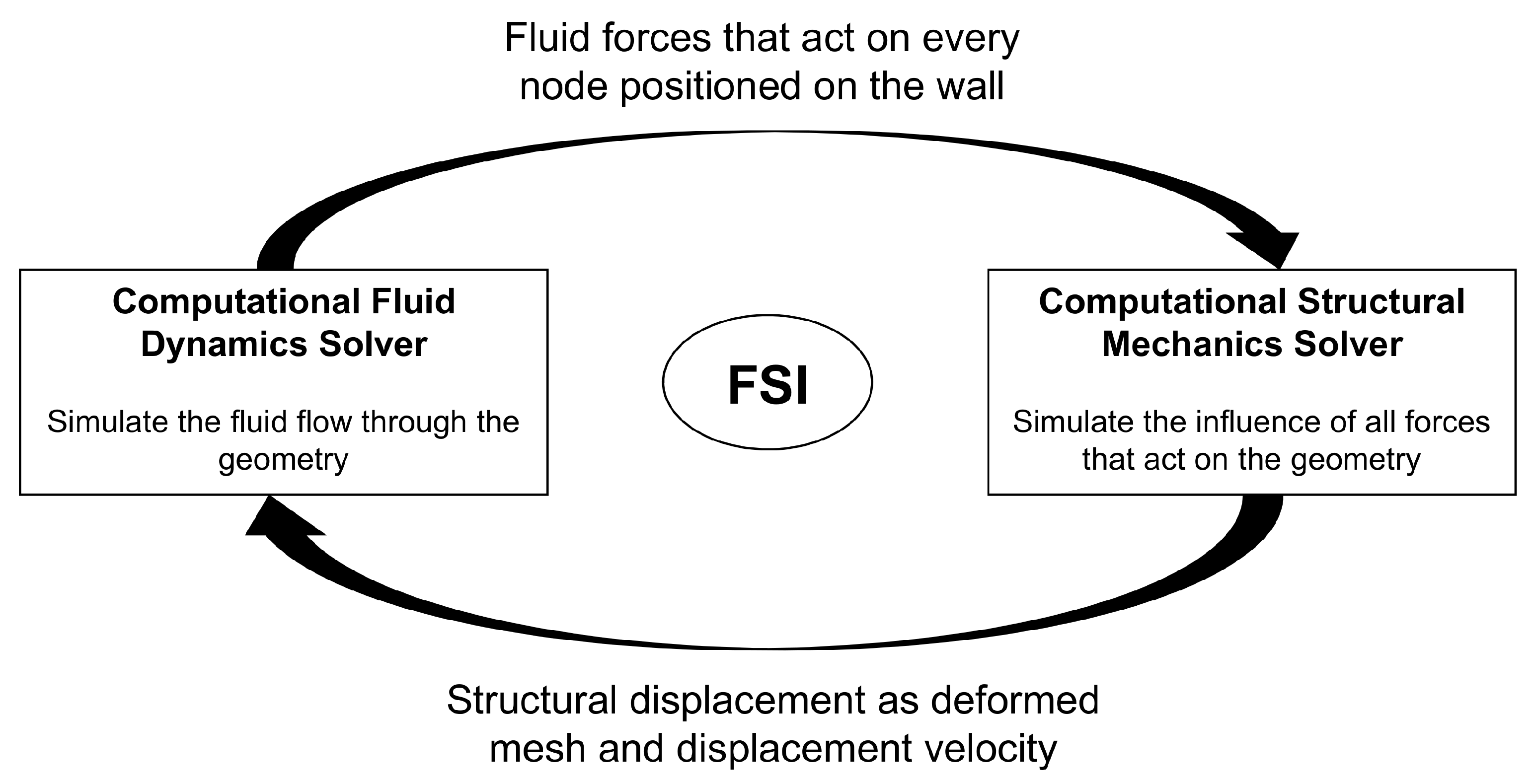
7]. These models have helped to understand the fundamental principle of CMF devices. Nevertheless, the influence of the fluid was greatly simplified and the practical operation could not be described completely. Therefore, fluid–structure interaction (FSI) models were developed to realize the operating principle, which means that the fluid motion is affected by the measuring pipe oscillation and the pipe motion in turn by the hydrodynamic forces. In recent years, iterative two-way FSI models, which consist of a separated computational fluid dynamics (CFD) solver and a computational structural mechanics (CSM) solver, were applied to simulate CMF.
Bobovnik et al. [
8] used two different solvers to simulate a straight tube. Commercially available finite volume code for three-dimensional turbulent fluid flow and finite element code for a shell structure were coupled. Five different tube lengths were studied simulating free tube vibration. The results for phase shift and frequency were similar to an analytical Flügge shell and potential flow model. In 2008, Mole et al. [
9] extended the three-dimensional numerical model of Bobovnik et al. [
8] to deal with forced vibration. The study comprises the investigation of meter sensitivity at different Reynolds numbers. A maximum decrease of
was observed for the lowest Reynolds number. This deviation is known as the low Reynolds number effect. The same numerical model was used by Bobovnik et al. [
10] to study the influence of the design parameters on the installation effects of a CMF. Installation effects are measured as change of meter sensitivities from fully developed to disturbed fluid flow. Considering a single straight tube, the errors vary with sensor positions and decrease with increasing tube length. In contrast, Kumar [
11] claimed that a CMF is not sensitive to flow profiles. The FSI model of ANSYS-CFX was used to consider a straight single tube. The results were quite similar for the shorter tube lengths in comparison to previous studies [
8]. In contrast, the longer tubes showed a higher deviation, which was attributed to the different resolution. By changing the viscosity, the Reynolds number was varied and the deviation in meter sensitivity could be captured. It was found that at low Reynolds numbers the oscillating viscous fluid forces become relatively strong and interact with the oscillating Coriolis force, which changes the measurement results. To further investigate the effect of the Reynolds numbers, Kumar and Anklin [
12] investigated a curved double tube CMF with an FSI simulation. The meter deviation at low Reynolds numbers were found in good agreement to measurement data. The low Reynolds number effect was indicated as correctable, if the viscosity of the examined fluid is known. Furthermore, Rongmo and Jian [
13] used the ANSYS-CFX FSI module to study the low Reynolds number effect in a U-tube CMF. They assumed that arising deviations may be due to those different damping factors. Damping influences the natural frequency of the tube and was expected to change the meter sensitivity.
The aforementioned studies employ traditional discretization methods like the finite volume method (FVM) for the fluid solver. Meanwhile, alternative approaches, such as the lattice Boltzmann method (LBM), have received increasing attention. Its highly efficient parallel algorithm [
14,
15], and its applicability to a wide range of flow phenomena, e.g., flows in complex geometry [
16,
17] or turbulent flows [
18,
19], offers a high potential.
One of the first approaches to couple LBM to a structural solver was by Scholz et al. [
20]. They propose an anisotropic
p-adaptive method for elastodynamic problems and show a higher convergence rate in comparison to a uniform
p-version. Especially, the load transfer between the fluid and structural mesh was discussed. Geller et al. [
21] used a partitioned approach to address the famous two-dimensional FSI benchmark case proposed by Turek and Hron [
22]. The proposed coupling approach by Geller et al. [
21] leads to consistent quantitative result. A further study to validate an LBM solver coupled to a
p-FEM solver with the Turek and Hron [
22] benchmark was published by Kollmannsberger et al. [
23]. The staggered coupling was shown to be sufficient for simulating the reference case due to the weaker impact of the additional mass effect at small time steps. In contrast, Li et al. [
24] claimed that the added mass effect has a major influence on accuracy and stability. They showed that the use of a non-staggered coupling approach based on subiterations reduced the effect of artificially added mass. Based on the previously mentioned studies [
20,
21,
23], Geller et al. [
25] extended the developed FSI approach to address three-dimensional benchmark problems.
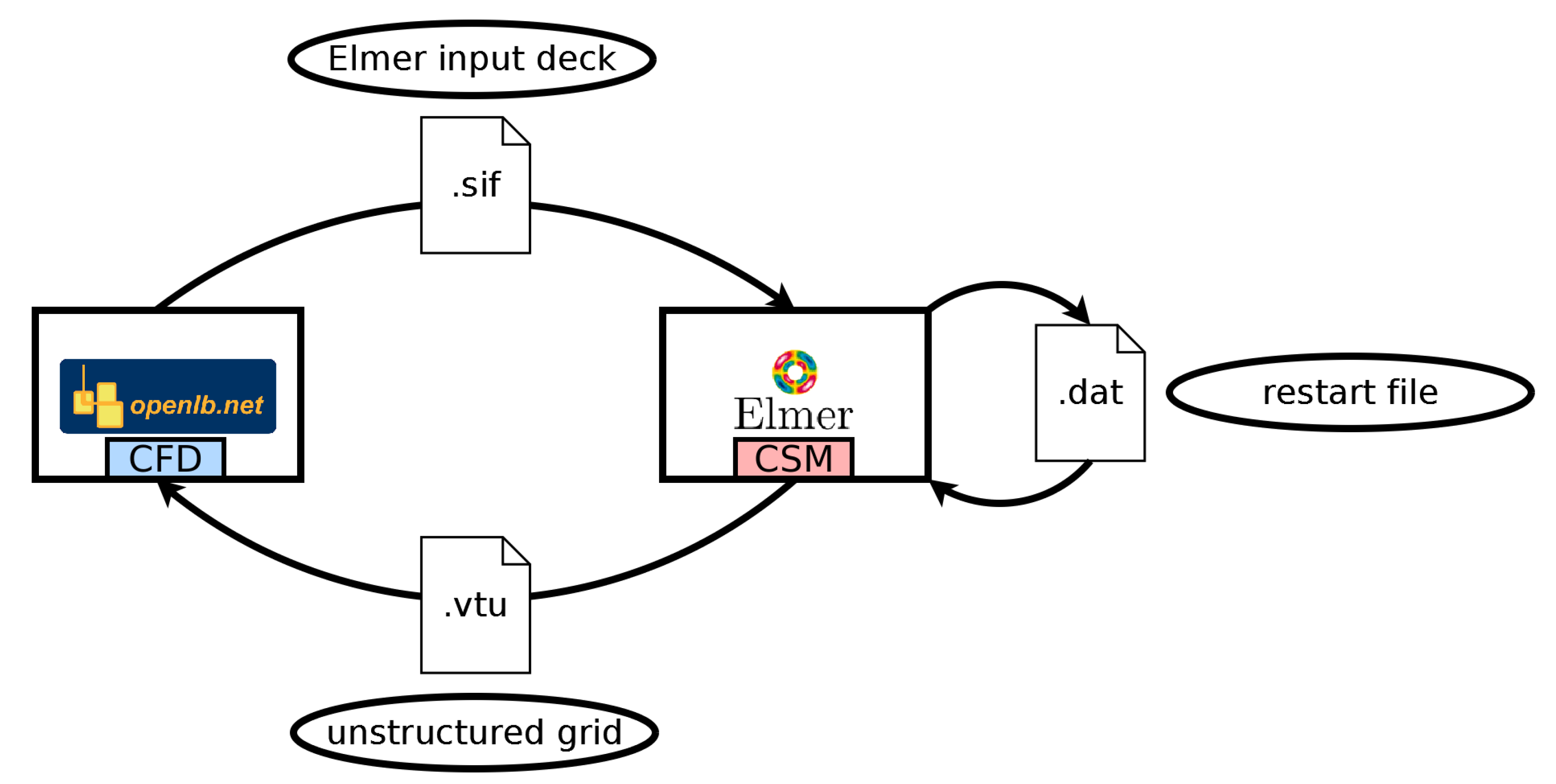
In contrast, this paper aims to demonstrate the feasibility of a complete open-source FSI workflow to simulate a CMF. Therefore, OpenLB [
26,
27], an open-source implementation of LBM, is coupled to the open-source FEM framework Elmer [
28]. The implemented coupling procedure uses a staggered approach. To the authors’ knowledge, this approach is the first attempt to describe an exterior FSI interface using a moving boundary method in combination with a structural solver. A modal analysis of the CMF geometry is executed to extract the excitation frequency. The obtained excitation frequency is applied in a frequency response test to evaluate the transient structural setting. The partitioned FSI approach is used to calculate the phase shift. Both the Eigenfrequencies and the phase shift values are compared to measurement data. The evaluation and validation of a complex engineering problem with a partitioned FSI approach using LBM is a novelty. As a further highlight, the new FSI workflow is built on open-source frameworks to ensure additional adaptions in the coupling interface.
The paper is structured as follows.
Section 2 introduces the applied FSI approach covering the fluid and structural models. In
Section 3, the CMF test case is depicted in detail. The related modal analysis and the subsequent phase shift calculation results, using the FSI approach, are presented and compared to the measurement data in
Section 4. Finally,
Section 5 summarizes the findings and draws a conclusion.
4. Results of the Coriolis Mass Flowmeter Test Case
After the mesh generation is completed, the Eigenfrequencies for the FEM mesh are calculated. The detection of the excitation frequency is a preliminary for the later phase shift calculation. Therefore, a modal analysis is performed with the structural solver Elmer.
4.1. Modal Analysis
The first modal analysis describes the condition for the measuring pipes filled with resting air. The structural parameters of steel are listed in
Table 1. Due to the low density of air compared to steel, the additional mass of air can be neglected.
Using the zero displacement boundary condition (see Equation (
25)), the first ten Eigenfrequencies of the FEM grid are calculated. The resulting values are shown in
Table 4.
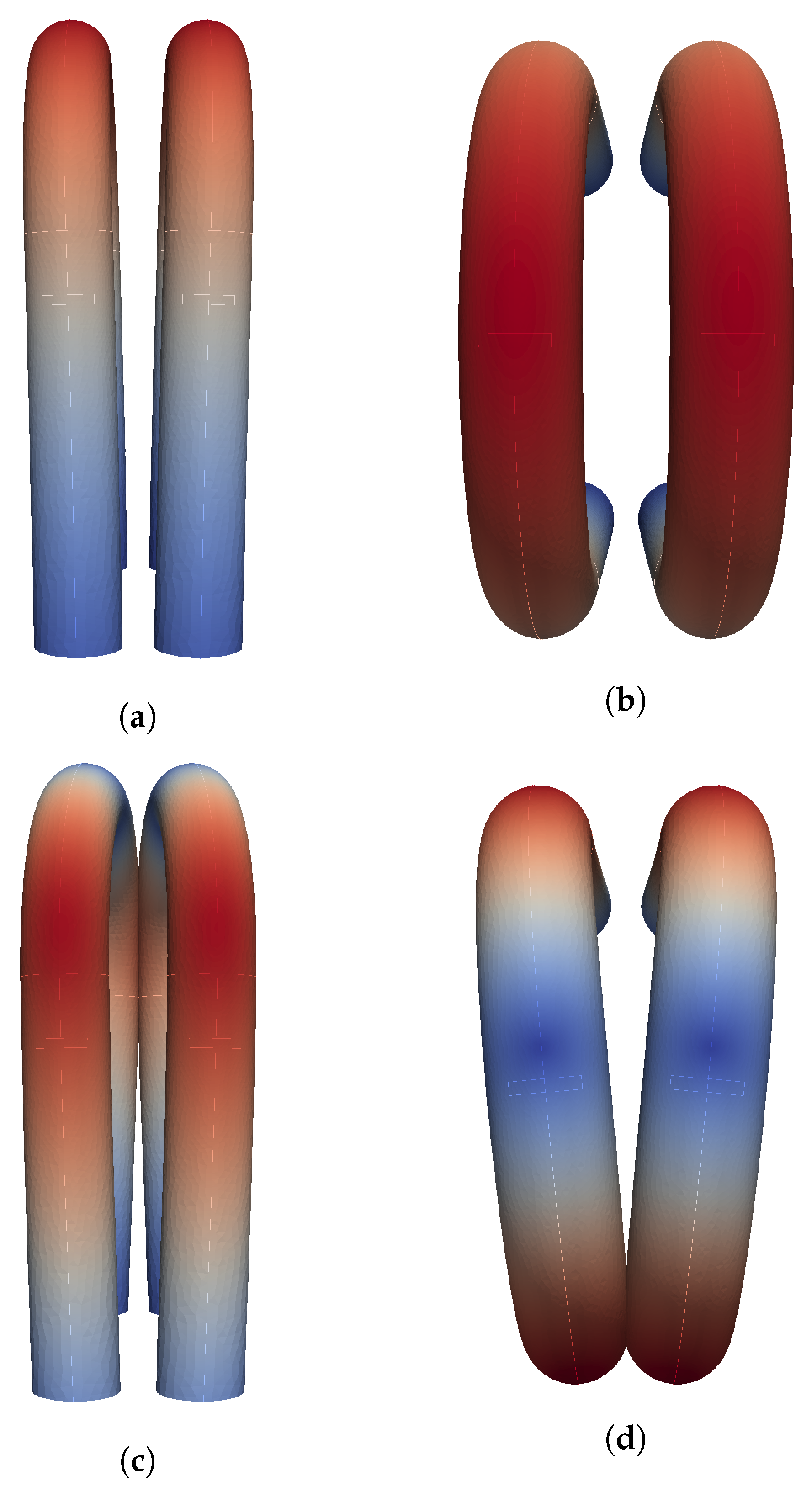
A closer look at each Eigenfrequency reveals the physical meaning. The searched excitation mode is found at mode number 2, and the Coriolis twist mode corresponds to mode number 8. The excitation mode is related to a parallel movement of the pipes towards and away from each other. On the contrary, the Coriolis twist introduces an additional twist of the pipes. For a better illustration, both modes are displayed in a front and top view in
Figure 9.
The next step is the test of the transient structural simulation. Two major aspects are investigated: on the one hand, the stability of the transient settings are estimated, and on the other hand, the resonant behavior are tested. The used structural boundary conditions are described in
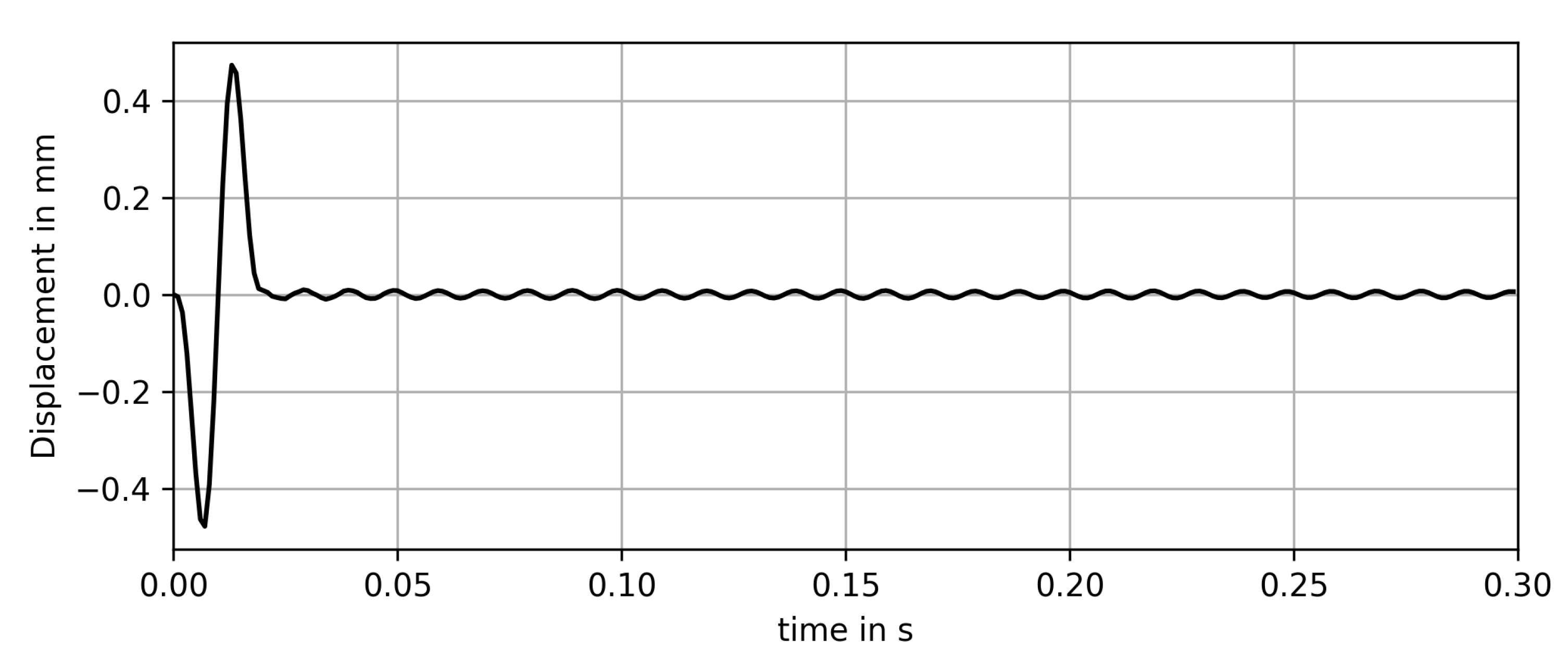
Section 3.1.1. In the first case, an excitation frequency different from the Eigenfrequency is selected to
. In
Figure 10, the structural response over time is plotted.
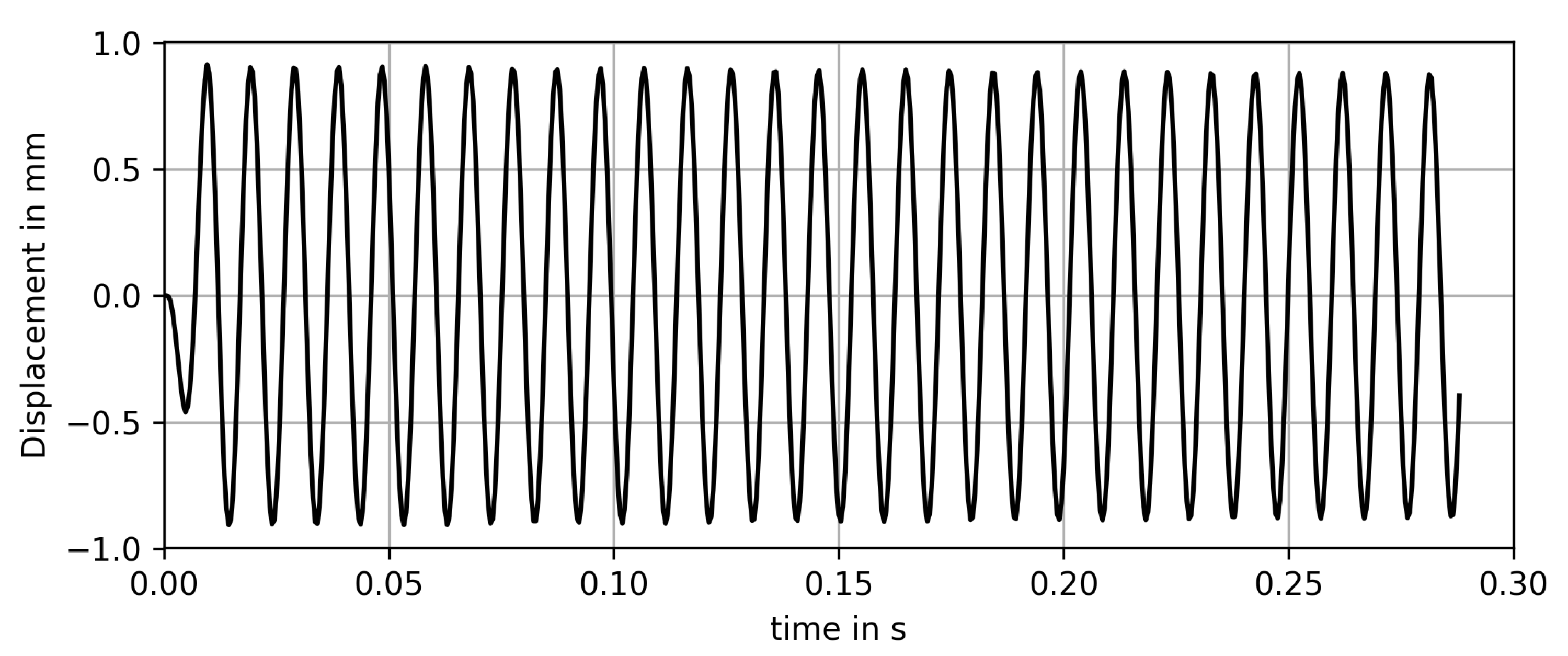
It can be seen that the amplitude is strongly decreasing after the first period and no resonance is observable. This behavior was expected, because the excitation frequency and the Eigenfrequency are mismatched. Nevertheless, the transient simulation is stable over the entire simulation time. In the second configuration, the excitation frequency is chosen with the Eigenfrequency to
. The displacement signal is depicted in
Figure 11.
The resonance is now clearly visible, which indicates that the results of the modal analysis are reliable and the transient simulation is also stable in the resonant case.
Additionally a further modal analysis is examined for water conveying tubes, which are used in the FSI case. Hereby, the additional mass of water cannot be neglected. The water filled tubes are approximated by a fictitious density of the tubes
= 12,319
, which is calculated by the total mass of the measuring pipes divided by the volume of the structural pipe domain. The results are summarized and compared to the measurement data in
Table 5.
The excitation frequencies for air and water are in good agreement to the measurement data (error ). The errors for the Coriolis frequency seems to be squared due to the higher mode.
4.2. Phase Shift Calculation
After the modal analysis has determined the Eigenfrequency of the pipes filled with water, the transient fluid structure simulation is used to extract the phase shift. First, the fluid field is initialized according to
Section 3.1.2. The simulation procedure, which is described in
Section 2.3.3, is executed in every coupling step
. The coupling period is chosen to the fluid time step
to minimize the time shift problem of the staggered approach. The simulation takes a total of 15 cycles which corresponds to approximately
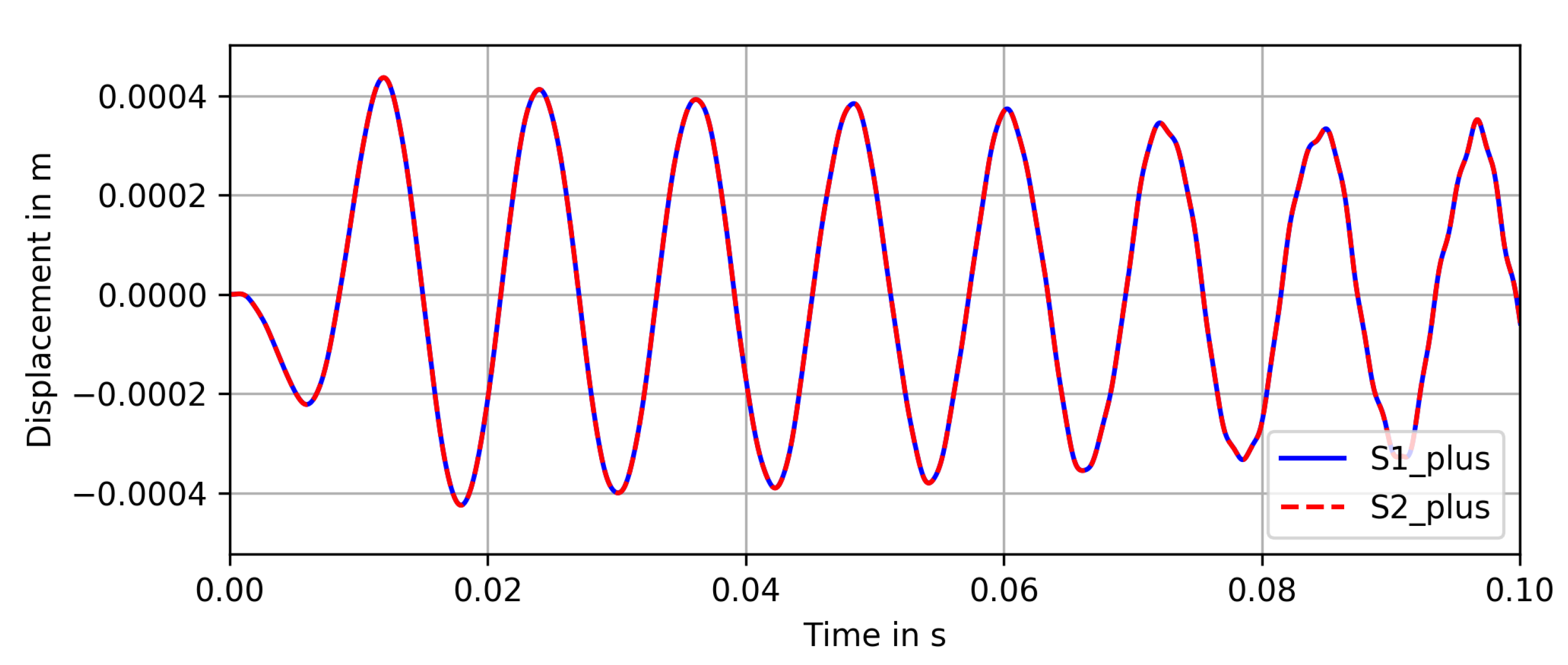
at the Eigenfrequency. Every cycle consists of 202 coupling steps. The displacement signal is extracted at the sensor positions S1_plus, S1_minus, S2_plus, and S2_minus, where plus and minus indicate the left and right measuring pipe, respectively. The written data files are postprocessed to extract the phase shift and the frequency of the displacement signals. The displacement signals of sensor S1_plus and S2_plus are depicted in
Figure 12.
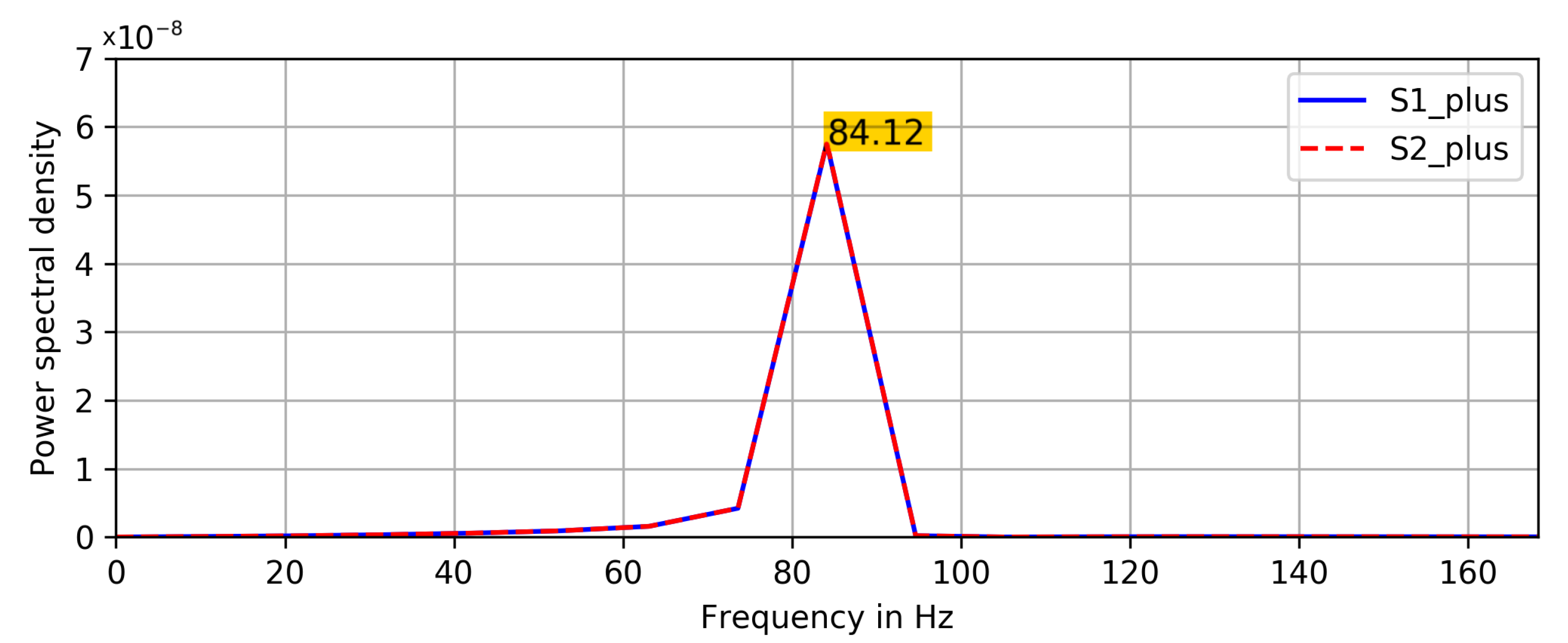
It can be seen that the signal is almost sinusoidal in the first 5 cycles and the amplitude slowly decays over time. The last depicted periods show irregularities and differ from the expected pure sinusoidal course of the displacement signal. Furthermore a frequency analysis is performed to estimate resonance frequency. The results can be seen in
Figure 13.
The highest peak at
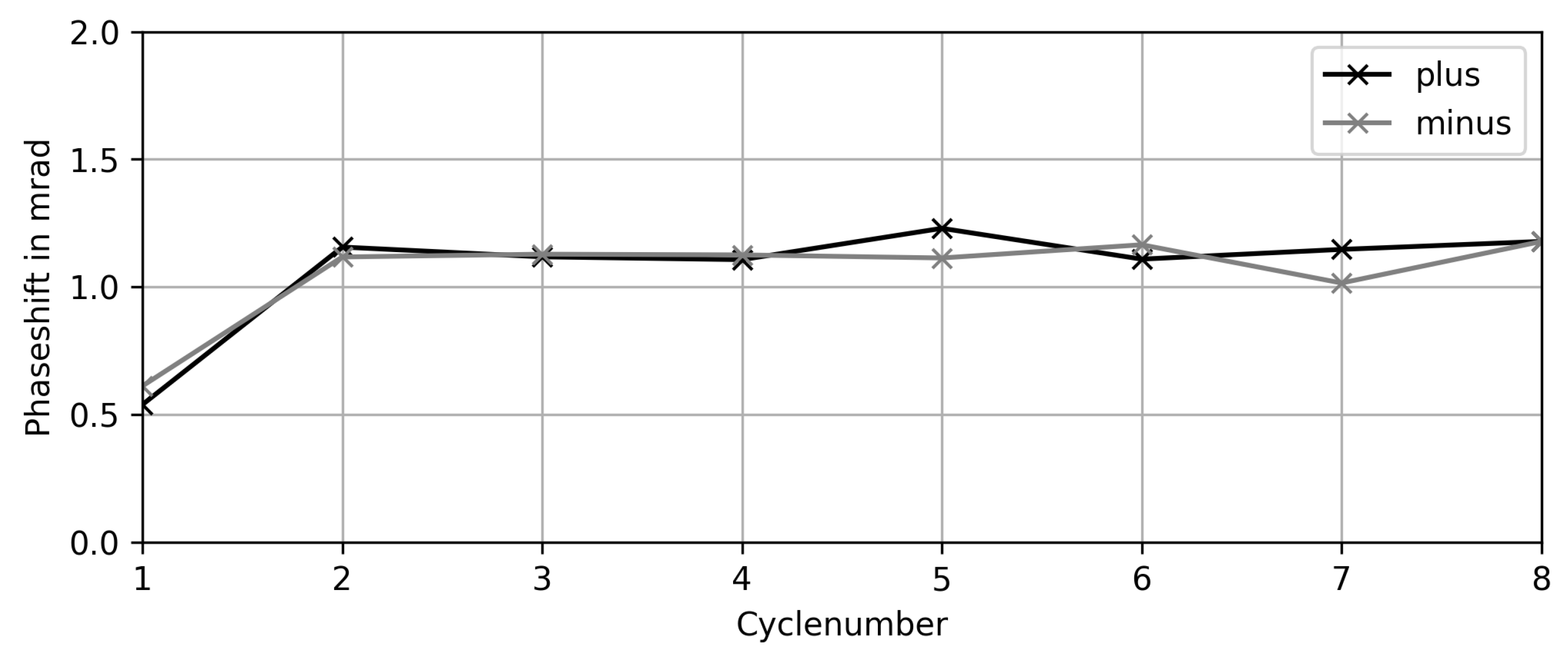
in the frequency analysis is in good agreement with the estimated excitation frequency. A discrete Hilbert transformation is applied on the displacement signal to calculate the phase shift, see
Figure 14.
The stability of the FSI system is given for the first 8 cycles of the simulation. The symmetry condition, which should be fulfilled due to a axial-symmetric geometry, is only slightly violated. The error of the averaged phase shift value
with respect to the experimental data
is smaller than 5%, which is shown in
Table 6.
The relative errors for a mass flow of 20,000 and 40,000 are less than 5%. Numerical experiments with fewer coupling steps are diverging in the first period, which indicates that the reduction of coupling steps does not lead to satisfactory results. Consequentially, 202 coupling periods are necessary to stabilize the simulation.
The simulation runtime was evaluated on a single node which consists of two deca-core Intel Xeon E5-2660 v3 processors. The comparison of the runtime to other numerical FSI simulations is depicted in
Table 7.
It can be seen that both computation time and calculated periods of the present study are comparable to literature values. The computation runtime is estimated as 65 h, and over 3000 coupling steps are performed. It is noticeable that the computing time has hardly changed over the years. This is a consequence of the segregated approach, if two solvers are involved in the FSI approach. The partitioning of the fluid and the solid domain differs due to the numerical method and geometrical constraints. This implies that the exchanged information are collected and communicated between the solvers, which is a time consuming step that is very difficult to parallelize.
5. Conclusions and Outlook
An FSI approach was presented for the simulation of a CMF. Thereby, the open source framework OpenLB and Elmer were used to create a segregated approach. The target equations of the structural and fluid domain were described. In addition, the coupling conditions and the implementation were outlined in detail. The FEM mesh generation process utilized the open source meshing tool Gmsh to ensure a complete open source workflow. A modal analysis was performed to extract the excitation frequency of water and air conveying pipes. The found excitation frequency was in good agreement to experimental measurements (error ). Afterwards, the FSI simulation, which uses the determined excitation frequency, was executed. The FSI simulation was stable for several cycles and allows to extract the phase shift with a sufficient precision (error ). Therefore, the presented FSI approach for CMF is able to describe the operating principle of a CMF. Furthermore, the runtime of the created FSI coupling was comparable to literature approaches using commercial software.
Nevertheless, certain issues should be addressed in future studies. The FSI simulation becomes unstable after several periods. The reasons for this upcoming instability could be diverse. First, the coupling time step could be decreased to reduce the time shift problem of the staggered coupling approach. Unfortunately this leads to an extended calculation time. Another possibility is the introduction of a subiteration scheme [
50], which reduces the added mass effect due to the time shift. Further improvements can be made by the calculation of the hydrodynamic force, because momentum exchange-based approaches suffer from inaccuracy if too few points are used for integration. Therefore, a stress-based calculation proposed in Geller et al. [
21] may be an alternative. Furthermore, the applied linear mapping method between the uniform Cartesian LBM grid and the unstructured FEM grid can be improved by using more complex mapping methods [
25].


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}