
Data-Driven Insights into Labor Progression with Gaussian Processes

Abstract
:1. Introduction
2. Methods
2.1. Data
2.2. Preprocessing
2.3. Gaussian Processes
2.4. GP Model Description and Kernel Selection
2.5. Model Implementation
2.6. Sparse Gaussian Process Regression Model Input Variables
2.7. Mixed-Effects Model
2.8. Performance Evaluation
3. Results
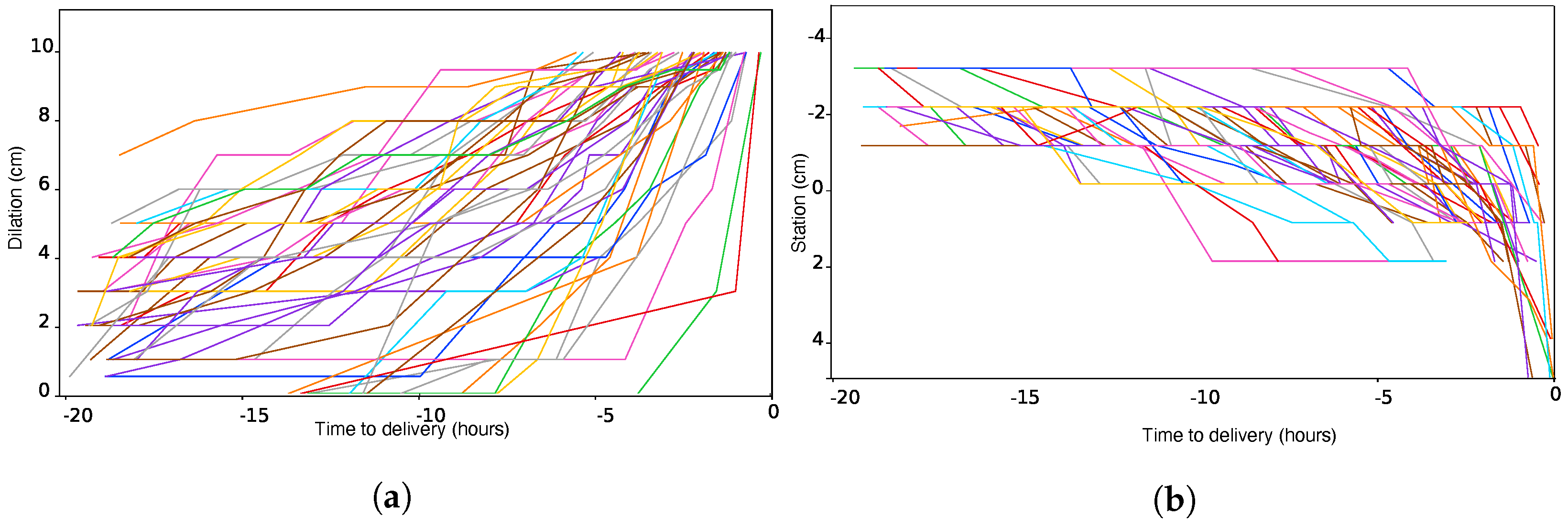
3.1. Observed Labor Progression Trajectories
3.2. Predictor Selection
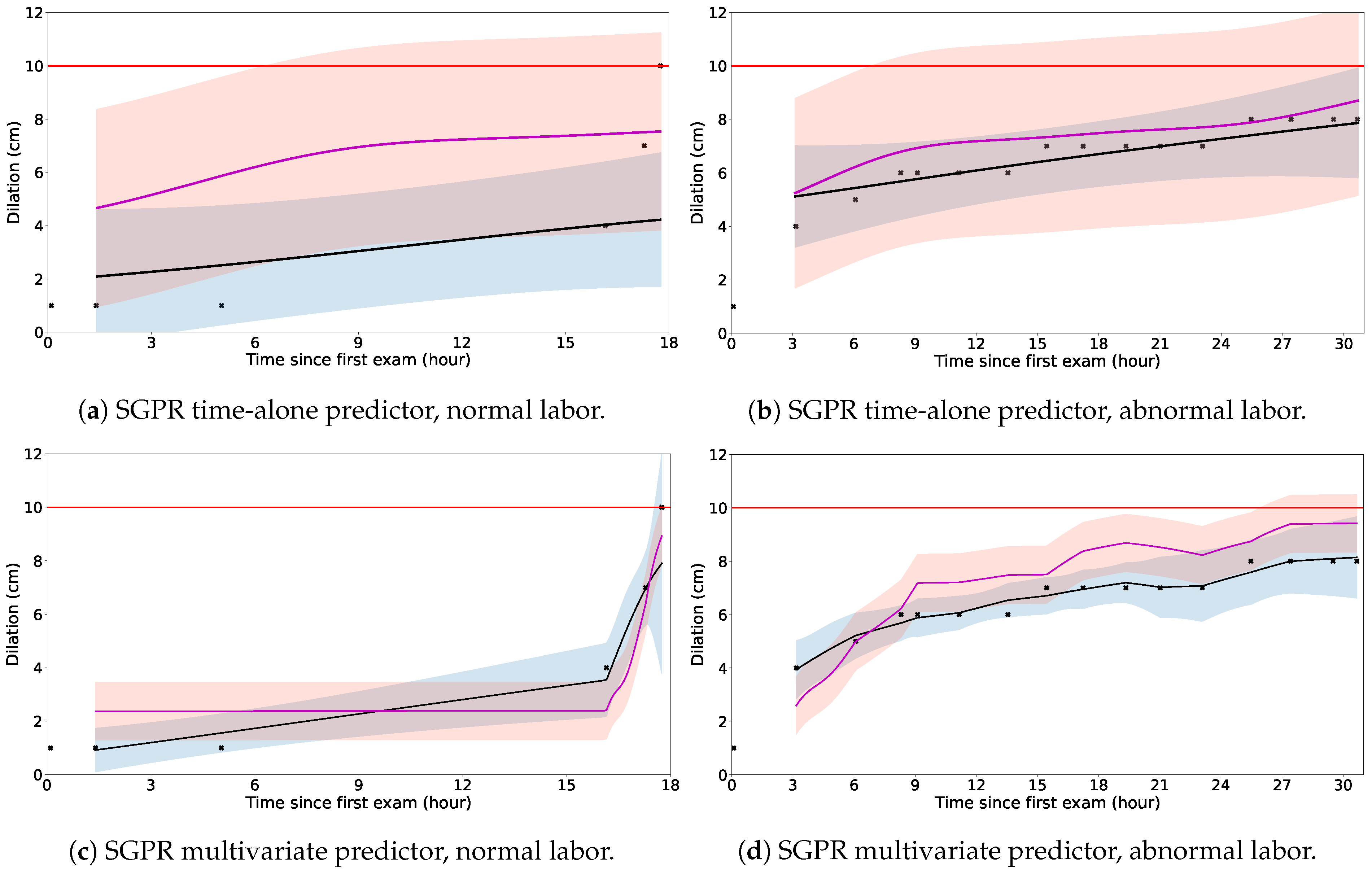
3.3. Sample Predicted Labor Progression
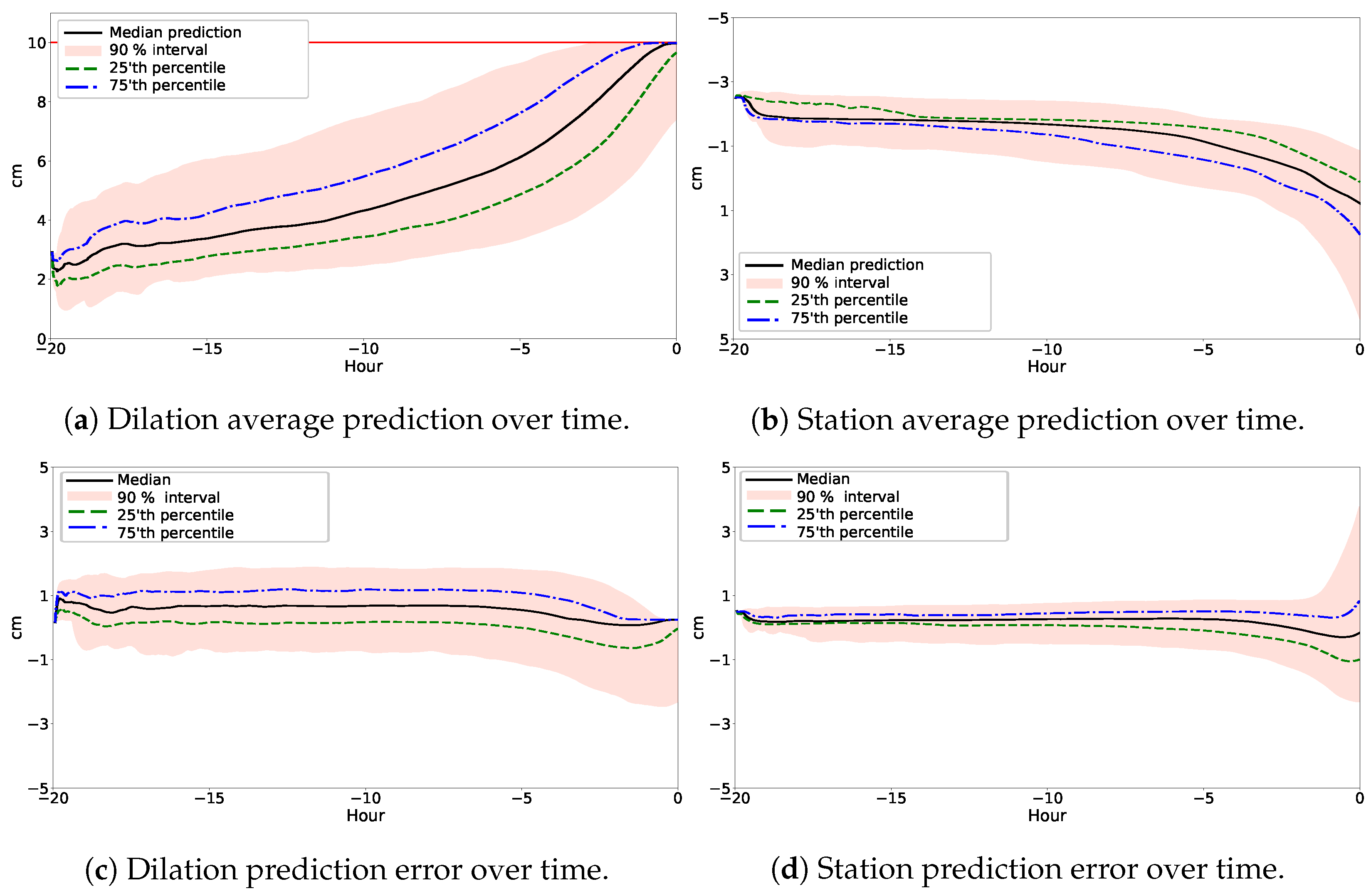
3.4. Population-Level Analysis of Labor Progression Prediction
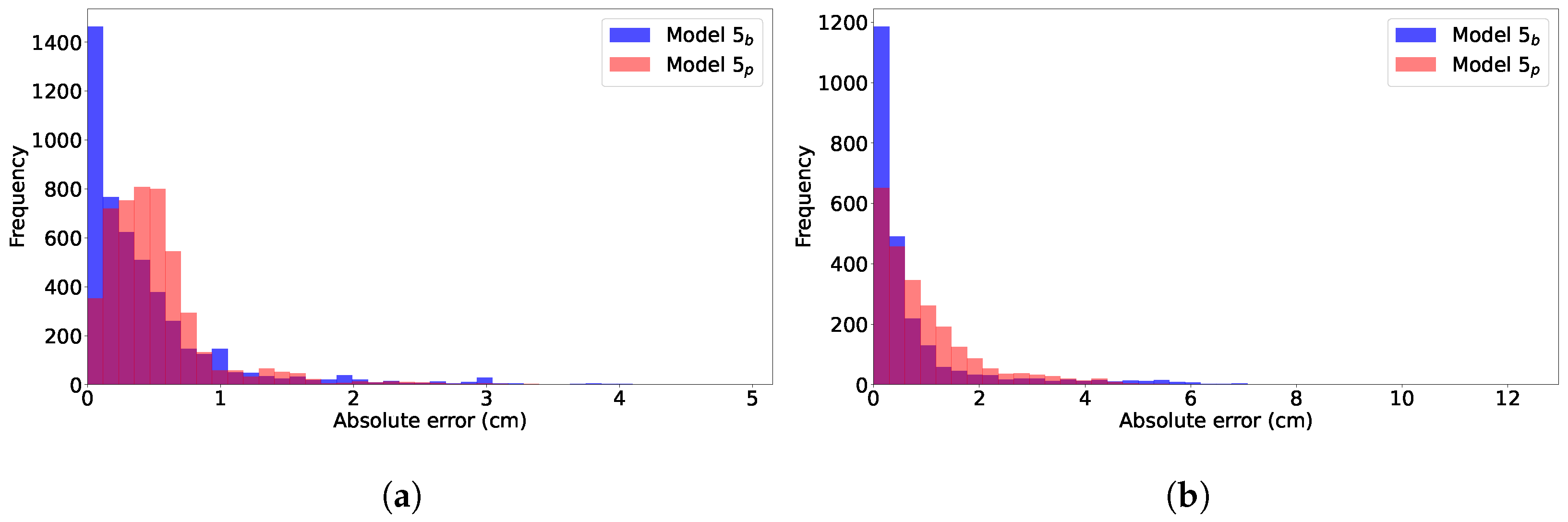
3.5. Evaluative Comparison of Predictive Models
3.6. Computational Load
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, J.; Troendle, J.; Reddy, U.M.; Laughon, S.K.; Branch, D.W.; Burkman, R.; Landy, H.J.; Hibbard, J.U.; Haberman, S.; Ramirez, M.M.; et al. Contemporary cesarean delivery practice in the United States. Am. J. Obstet. Gynecol. 2010, 203, 326.e1–326.e10. [Google Scholar] [CrossRef]
- American College of Obstetricians and Gynecologists (College); Society for Maternal-Fetal Medicine; Caughey, A.B.; Cahill, A.G.; Guise, J.M.; Rouse, D.J. Safe prevention of the primary cesarean delivery. Am. J. Obstet. Gynecol. 2014, 210, 179–193. [Google Scholar] [CrossRef]
- World Health Organization. WHO Labour Care Guide: User’s Manual. Geneva, 2023. Licence: CC BY-NC-SA 3.0 IGO. Available online: https://www.who.int/publications/i/item/9789240017566 (accessed on 10 December 2023).
- Friedman, E.A.; Kroll, B.H. Computer analysis of labour progression. J. Obstet. Gynaecol. Br. Commonw. 1969, 76, 1075–1079. [Google Scholar] [CrossRef]
- Zhang, J.; Troendle, J.; Grantz, K.L.; Reddy, U.M. Statistical aspects of modeling the labor curve. Am. J. Obstet. Gynecol. 2015, 212, 750.e1–750.e4. [Google Scholar] [CrossRef]
- Wood, S.; Skiffington, J.; Brant, R.; Crawford, S.; Hicks, M.; Mohammad, K.; Mrklas, K.J.; Tang, S.; Metcalfe, A.; Team, R.T. The REDUCED Trial: A Cluster Randomized Trial for REDucing the Utilization of CEsarean Delivery for Dystocia. Am. J. Obstet. Gynecol. 2023, 228, S1095–S1103. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; Adaptive computation and machine learning; MIT Press: Cambridge, MA, USA, 2006; pp. 1–248. [Google Scholar]
- Perez-Cruz, F.; Vaerenbergh, S.V.; Murillo-Fuentes, J.J.; Lazaro-Gredilla, M.; Santamaria, I. Gaussian Processes for Nonlinear Signal Processing: An Overview of Recent Advances. IEEE Signal Process. Mag. 2013, 30, 40–50. [Google Scholar] [CrossRef]
- Deisenroth, M.P.; Fox, D.; Rasmussen, C.E. Gaussian Processes for Data-Efficient Learning in Robotics and Control. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 408–423. [Google Scholar] [CrossRef]
- Pimentel, M.; Clifton, D.A.; Clifton, L.; Tarassenko, L. Modelling patient time-series data from electronic health records using Gaussian processes. In Proceedings of the Advances in Neural Information Processing Systems: Workshop on Machine Learning for Clinical Data Analysis, Stateline, NV, USA, 5–10 December 2013; pp. 1–4. [Google Scholar]
- Futoma, J.D. Gaussian Process-Based Models for Clinical Time Series in Healthcare. Ph.D. Thesis, Duke University, Durham, NC, USA, 2018. Available online: https://hdl.handle.net/10161/16871 (accessed on 10 December 2023).
- Chung, I.; Kim, S.; Lee, J.; Kim, K.J.; Hwang, S.J.; Yang, E. Deep Mixed Effect Model using Gaussian Processes: A Personalized and Reliable Prediction for Healthcare. arXiv 2019, arXiv:1806.01551. [Google Scholar] [CrossRef]
- Nemali, A.; Vockert, N.; Berron, D.; Maas, A.; Bernal, J.; Yakupov, R.; Peters, O.; Gref, D.; Cosma, N.; Preis, L.; et al. Gaussian Process-based prediction of memory performance and biomarker status in ageing and Alzheimer’s disease—A systematic model evaluation. Med. Image Anal. 2023, 90, 102913. [Google Scholar] [CrossRef] [PubMed]
- Feng, G.; Quirk, J.G.; Djurić, P.M. Inference About Causality from Cardiotocography Signals Using Gaussian Processes. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 2852–2856. [Google Scholar] [CrossRef]
- Cheng, L.F.; Darnell, G.; Dumitrascu, B.; Chivers, C.; Draugelis, M.E.; Li, K.; Engelhardt, B.E. Sparse multi-output Gaussian Processes for medical time series prediction. arXiv 2017, arXiv:1703.09112. [Google Scholar] [CrossRef] [PubMed]
- Quiñonero-Candela, J.; Rasmussen, C.E. A Unifying View of Sparse Approximate Gaussian Process Regression. J. Mach. Learn. Res. 2005, 6, 1939–1959. [Google Scholar]
- Snelson, E.; Ghahramani, Z. Sparse Gaussian Processes using pseudo-inputs. Adv. Neural Inf. Process. Syst. 2006, 18, 1259–1266. [Google Scholar]
- Hensman, J.; Fusi, N.; Lawrence, N.D. Gaussian Processes for Big Data. arXiv 2013, arXiv:1309.6835. [Google Scholar]
- Matthews, A.G.d.G.; Hensman, J.; Turner, R.E.; Ghahramani, Z. On Sparse variational methods and the Kullback-Leibler divergence between stochastic processes. arXiv 2015, arXiv:1504.07027. [Google Scholar]
- Hamilton, E.; Kimanani, E.K. Intrapartum prediction of fetal status and assessment of labour progress. Bailliere’s Clin. Obstet. Gynaecol. 1994, 8, 567–581. [Google Scholar] [CrossRef] [PubMed]
- Hamilton, E.F.; Zhoroev, T.; Warrick, P.A.; Romero, R.; Tarca, A.L.; Garite, T.J.; Caughey, A.B.; Melillo, J.; Prasad, M.; Neilson, D.; et al. New labor curves of dilation and station to improve the accuracy of predicting labor progress. Am. J. Obstet. Gynecol. 2023. under review. [Google Scholar]
- Langen, E.S.; Weiner, S.J.; Bloom, S.L.; Rouse, D.J.; Varner, M.W.; Reddy, U.M.; Ramin, S.M.; Caritis, S.N.; Peaceman, A.M.; Sorokin, Y.; et al. Association of Cervical Effacement With the Rate of Cervical Change in Labor Among Nulliparous Women. Obstet. Gynecol. 2016, 127, 489–495. [Google Scholar] [CrossRef]
- Quincy, M.M.; Weng, C.; Shafer, S.L.; Smiley, R.M.; Flood, P.D.; Mirza, F.G. Impact of Cervical Effacement and Fetal Station on Progress during the First Stage of Labor: A Biexponential Model. Am. J. Perinatol. 2014, 31, 745–751. [Google Scholar] [CrossRef]
- Roshanfekr, D.; Blakemore, K.J.; Lee, J.; Hueppchen, N.A.; Witter, F.R. Station at onset of active labor in nulliparous patients and risk of cesarean delivery. Obstet. Gynecol. 1999, 93, 329–331. [Google Scholar] [CrossRef]
- Fortuin, V.; Strathmann, H.; Rätsch, G. Meta-learning mean functions for Gaussian Processes. arXiv 2019, arXiv:1901.08098. [Google Scholar]
- Bonilla, E.V.; Chai, K.; Williams, C. Multi-task Gaussian Process Prediction. Adv. Neural Inf. Process. Syst. 2007, 20. Available online: https://papers.nips.cc/paper_files/paper/2007/hash/66368270ffd51418ec58bd793f2d9b1b-Abstract.html (accessed on 10 December 2023).
- Matthews, A.G.d.G.; van der Wilk, M.; Nickson, T.; Fujii, K.; Boukouvalas, A.; León-Villagrá, P.; Ghahramani, Z.; Hensman, J. GPflow: A Gaussian process library using TensorFlow. J. Mach. Learn. Res. 2017, 18, 1–6. [Google Scholar]
- Seabold, S.; Perktold, J. Statsmodels: Econometric and statistical modeling with Python. In Proceedings of the 9th Python in Science Conference, Austin, TX, USA, 28 June–3 July 2010. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Coefficient | Standard Error | p-Value |
|---|---|---|---|
| Fixed Effects () | |||
| Previous Dilation () | 0.734 | 0.004 | <0.001 |
| Previous Station ( ) | 0.077 | 0.007 | <0.001 |
| Previous Effacement ( ) | 0.026 | 0.000 | <0.001 |
| Cumulative Contraction Count () | 0.001 | 0.000 | <0.001 |
| Epidural () | 0.613 | 0.015 | <0.001 |
| Random Effects () | |||
| Group Variance (Delivery ID) | 0.140 | 0.011 | – |
| Model variance () | 2.035 | – | – |
| Model | Name | Dilation RMSE (cm) | vs. Model | p-Value | Station RMSE (cm) | vs. Model | p-Value |
|---|---|---|---|---|---|---|---|
| 1 | GP(t) | 2.504 ± 2.382 × 10 | - | - | - | - | - |
| 2 | ME | 1.176 ± 1.252 × 10 | 1 | <1 × 10 * | - | - | - |
| 3 | GP | 1.168 ± 1.163 × 10 | 2 | 0.141 | - | - | - |
| 4 | GP | - | - | - | 0.6625 ± 1.535 × 10 | - | - |
| 5 | GP | 1.126 ± 1.057 × 10 | 3 | <1 × 10 * | 0.6601 ± 7.518 × 10 | 4 | 0.7474 |
| 5 | GP | 1.093 ± 3.51 × 10 | 5 | 1.3 × 10 * | 0.7276 ± 1.05 × 10 | 5 | <1 × 10 * |
| Model | Name | Dilation RMSE (cm) | vs. Model | p-Value | Station RMSE (cm) | vs. Model | p-Value |
|---|---|---|---|---|---|---|---|
| 1 | GP(t) | 2.661 ± 8.120 × 10 | - | - | - | - | - |
| 2 | ME | 1.382 ± 1.015 × 10 | 1 | <1 × 10 * | - | - | - |
| 3 | GP | 1.424 ± 1.699 × 10 | 2 | <1 × 10 * | - | - | - |
| 4 | GP | - | - | - | 0.8687 ± 4.70 × 10 | - | - |
| 5 | GP | 1.354 ± 1.469 × 10 | 3 | <1 × 10 * | 0.8499 ± 4.46 × 10 | 4 | <1 × 10 * |
| 5 | GP | 1.400 ± 1.310 × 10 | 5 | <1 × 10 * | 0.9004 ± 4.50 × 10 | 5 | <1 × 10 * |
| Data | Model | Name | Dilation MAE (cm) | vs. Model | p-Value | Station MAE (cm) | vs. Model | p-Value |
|---|---|---|---|---|---|---|---|---|
| O | 5 | GP | 0.826 ± 8.68 × 10 | - | - | 0.512 ± 4.55 × 10 | - | - |
| O | 5 | GP | 0.602 ± 1.83 × 10 | 5 | <1 × 10 * | 0.446 ± 7.70 × 10 | 5 | <1 × 10 * |
| I | 5 | GP | 0.947 ± 3.77 × 10 | 3 | <1 × 10 * | 0.627 ± 4.96 × 10 | - | - |
| I | 5 | GP | 0.729 ± 5.70 × 10 | 5 | <1 × 10 * | 0.544 ± 6.40 × 10 | 5 | <1 × 10 * |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhoroev, T.; Hamilton, E.F.; Warrick, P.A. Data-Driven Insights into Labor Progression with Gaussian Processes. Bioengineering 2024, 11, 73. https://doi.org/10.3390/bioengineering11010073
Zhoroev T, Hamilton EF, Warrick PA. Data-Driven Insights into Labor Progression with Gaussian Processes. Bioengineering. 2024; 11(1):73. https://doi.org/10.3390/bioengineering11010073
Chicago/Turabian StyleZhoroev, Tilekbek, Emily F. Hamilton, and Philip A. Warrick. 2024. "Data-Driven Insights into Labor Progression with Gaussian Processes" Bioengineering 11, no. 1: 73. https://doi.org/10.3390/bioengineering11010073