1. Introduction
Based on current projections, flood frequencies will increase significantly on a global scale [
1,
2]. Global flood frequency has increased 42% in land areas, and in areas near rivers, a 100-year flood will occur every 10–50 years [
3]. Another study concluded that 48% of the world’s land area, 52% of the global population, and 46% of global assets will be at risk of flooding by 2100 [
4]. They estimate that 68% of these new floods will be caused by tides and storm events. Near-real-time emergency response and post-event damage mitigation both require flood-extent mapping and corresponding water-depth information [
5]. There are several proposed methods for monitoring water levels during a flood, including the utilization of ground-based sensors with self-calibration capabilities, especially with the latest advancement of machine-learning techniques and the Internet of Things [
6,
7,
8,
9,
10]. However, the sensing option is still limited by the deployment process and the limited spatial coverage.
Due to the cost of purchasing, deploying, and maintaining a large network of sensors, other methods that retrieve flood data from pre-existing sources have been practiced. Crowdsourcing images from readily available sources online were utilized with R-CNN networks in several studies to derive the flood extent [
11]. However, this method requires images to be taken of the same area when dry, meaning that data cannot be provided in real time. Unfortunately, since these images are posted by unaffiliated users, emergency services and government organizations cannot request scans of a particular area. Surveillance cameras, even those empowered by the latest artificial intelligence technologies for water and object detection, are limited in coverage and often in fixed positions and angles [
12]. On the other hand, flood-depth calculation methods are generally based on hydraulic modeling or terrain-derived approaches [
13]. These methods often require the utilization of data from ground-based sensors, thus necessitating detailed meteorological and hydrological information for model initiation and flood analysis [
14], which can hinder their application in near-real-time emergency responses, particularly in data-sparse regions [
15].
Both coarse-resolution optical satellite images, such as those derived from MODIS and NOAA AVHRR, and medium-resolution images from Landsat, Sentinel-2, and radar Sentinel-1 offer invaluable perspectives for capturing flood dynamics at local and national scales, respectively [
16,
17]. Peng et al. [
18] proposed a self-supervised learning framework for patch-wise urban flood mapping using bitemporal multispectral satellite imagery. Psomiadis et al. [
19] found that combining multi-temporal remote-sensing data and hydraulic modeling can provide timely and useful flood observations during and immediately after flood disasters, and such a combination is applicable in a large part of the world where instrumental hydrological data are scarce. Schumann et al. [
20] showed that remotely sensed imagery, particularly from the new TerraSAR-X radar, can reproduce dynamics adequately and support flood modeling in urban areas. Heimhuber et al. [
21] addressed spatiotemporal resolution constraints in Landsat and MODIS-based mapping of large-scale floodplain inundation dynamics and found that both series provided new and temporally consistent information about changes in the inundation extent throughout the flooding cycles.
The use of satellite imagery to identify flooded areas has been widely adopted with different data-processing approaches [
22,
23]. Many water extraction models make use of the Normalized Difference Water Index (NDWI), which is given as the difference of reflectance between green and NIR, divided by the summation of green and NIR [
24]. The performance of NDWI for water extraction also tends to decrease for turbid waters and is also sensitive to human-built structures, thus limiting its effectiveness in urban environments [
25,
26]. A good balance between the static ground-based sensors and the satellites includes low-flying aerial systems. The rise of drones has created the availability of low cost, rapidly deployable monitoring solutions, with the cost of a surveillance drone as low as USD 1500, while the cost of traditional surveillance methods is more than USD 10,000. In addition, the drone-based scans can be performed in half the time it would take for the same scan to be performed traditionally while offering a significantly lower cost.
Unmanned aerial vehicles (UAVs) are highly advantageous when trying to monitor flood conditions and have recently become popular for flood monitoring due to their ability to provide high-resolution data over large areas in a short amount of time. UAVs are bridging the gap between lower resolution satellite methods and high-resolution land-based measurements with better accuracy with respect to inundation mapping [
27,
28] and water depth estimation [
29]. In addition, they can also be used to quickly search for damage after a disaster has passed. The primary disadvantage of UAVs, however, is the smaller coverage area (a few square kilometers) due to the limitations of energy reserves, regulations on flying height and speed, and regulations to protect air traffic, safety of people and property on the ground, as well as privacy [
30,
31,
32]. UAVs are also limited by the climate condition [
30,
33,
34,
35]. Another disadvantage of UAVs is the pre-processing time required to produce multispectral orthomosaics which may take up to 24 h in some instances. While UAVs provide the advantages of flexibility and ease-of-use, additional uncertainties with respect to data processing may be introduced, including initial calibration procedures, the camera angle, or potential issues encountered during flight [
33,
36,
37]. On the other hand, satellites such as NASA’s Land, Atmosphere Near real-time Capability for Earth Observing Systems (LANCE) leverages existing satellite-data-processing systems in order to provide data and imagery available from select EOS instruments (currently AIRS, AMSR2, ISS LIS, MISR, MLS, MODIS, MOPITT, OMI, OMPS, and VIIRS) within 3 h of satellite overpass [
20].
Despite the promise of quick and cheap surveillance, there are still more limitations to overcome when using UAVs for water level measurement. First, because UAVs are relatively new, there is a lack of pre-existing data available for training the AI that will be used to identify water depth where data augmentation is generally needed for a wide variety of images resembling different conditions (lighting levels, image quality, and alternate viewing angles) [
31]. In addition, because the newly generated images are already annotated, it is not necessary to spend time reviewing the dataset. Another issue is that the AIs used most frequently in flood detection, CNNs, are primarily trained with ground-based images. As such, they are incapable of accurately identifying objects from an aerial perspective [
31,
38]. While a large magnitude of training and data-preparing process requirements may limit applications in near-real-time flood detection, a variety of approaches have been tested to increase accuracy in a wider range of scenarios [
39,
40,
41,
42].
Compared with studies using other computationally intense methods, this study sought to transform the conventional methodology of inundation prediction by devising a inexpensive non-contact UAV-derived observational system capable of providing near-real-time inundation extent and depth mapping for flooding events. The goal was achieved by both utilizing and generating digital elevation models and building a detection algorithm upon them. The study was completed for Hurricane Zeta during the 2020 Atlantic hurricane season in Elkin, North Carolina. Zeta formed on October 19 from a low-pressure system in the Western Caribbean Sea and made landfall as a Category 3 hurricane in Southeast Louisiana on 28 October. Zeta traveled northeast through the entire state of North Carolina, where it transitioned to a post-tropical cyclone. The outer bands of the storm brought high winds and heavy rainfall to Surry County on 28 October. By 29 October, the rainfall ceased, and the wind had weakened enough to deploy a UAV, with moderate flooding still forecasted for later that day on the Yadkin River at Elkin, North Carolina.
2. Materials and Methods
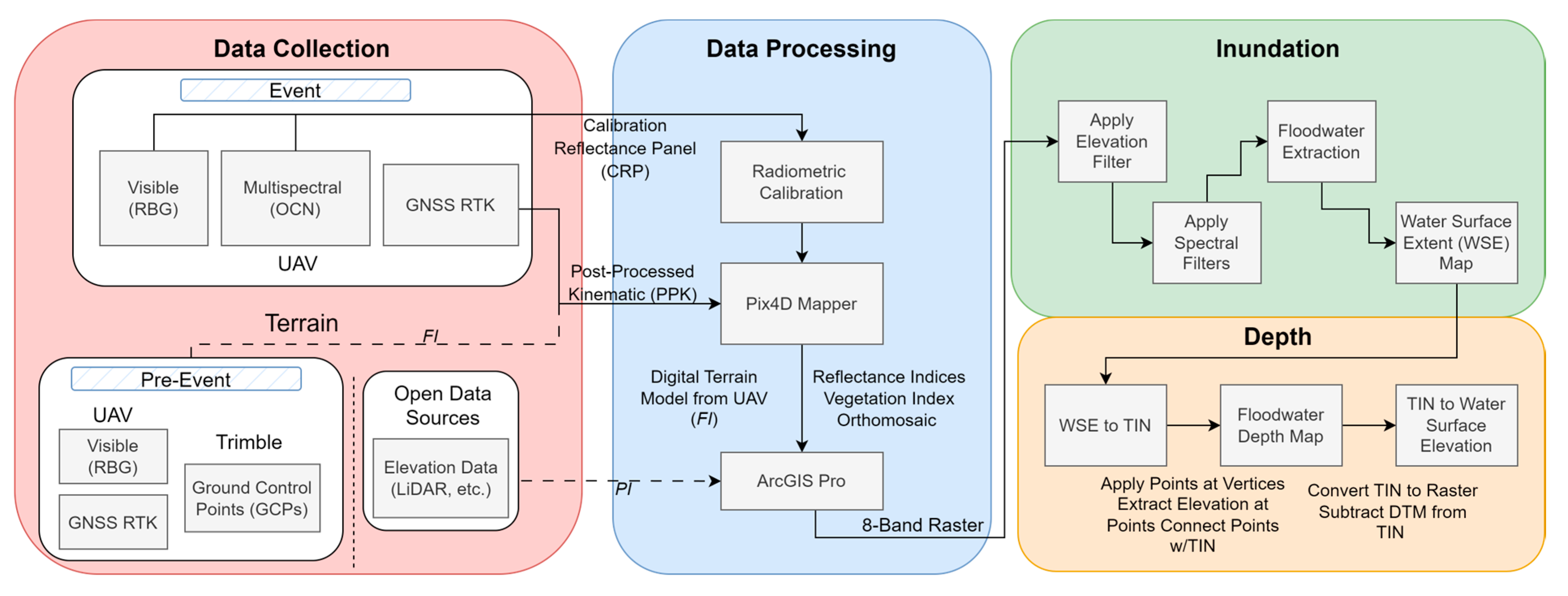
This paper introduces a novel, rapidly deployable UAV water surface detection method referred to as UAV–Floodwater Inundation and Depth Mapper (FIDM). The methodology is summarized in
Figure 1. The three major components are (1) aerial data collection, (2) data processing, and (3) floodwater inundation (water surface extent) mapping and depth mapping. UAV-FIDM is carried out for two modes, namely a partial (LiDAR-derived) integration (PI) and full (UAV-DEM-derived) integration (FI). The PI makes use of any existing elevation data from publicly available sources, such as from the US Geological Society (USGS), while the FI generates elevation from data obtained by the UAV and further utilizes them in deriving the final surface extent and depth products.
2.1. Study Area
The study area is located in the Town of Elkin, Surry County, North Carolina, USA (
Figure 2). The Yadkin River flows just south of the Historic Elkin Downtown District. With headwaters originating in the Blue Ridge Mountain foothills, it forms the northernmost part of the Pee Dee drainage basin. The Yadkin River is regulated upstream of the project site at the W. Kerr Scott Dam and Reservoir in Wilkesboro, North Carolina. The region is characterized by forests of mixed hardwoods, including hickory, sycamore, and poplar. The project site was selected due to ease-of-access, combined with the high likelihood of riverine flooding induced by Hurricane Zeta. The study area consists of the Downtown District at U.S. 21 Business and the Yadkin River and includes six road closures due to flooding at U.S. 21 Business, Commerce St., Elk St., Standard St., and Yadkin St. The total project area is approximately 0.39 km
2 (100 acres) and is bounded by WGS 84 coordinates of 36°14′40″ N, 80°51′15″ W (northwest), 36°14′40″ N, 80°50′45″ W (northeast), 36°14′15″ N, 80°50′45″ W (southeast), and 36°14′15″ N, 80°51′15″ W.
2.2. UAV Platform and Sensors
The UAV used in this study is a customized DJI Phantom 4 Pro quadcopter (P4P). The P4P is equipped with a 1-inch, 20-Megapixel CMOS camera. The lens is 8 mm × 24 mm with a field of view (FOV) of 84°. The image size is 5472 × 3648 pixels with output in JPEG and DNG format. A GNSS receiver (rover) is linked to the camera’s shutter signal to record precise time marks and coordinates for every photo taken. A second RTK GNSS receiver (base) is installed on a survey monument and records a fixed position for the duration of the flight. The GPS measurements from the base are used to apply corrections to the rover, using a Post-Processed Kinematic (PPK) workflow, providing survey-grade positioning. The sensor dataset associated with the UAV’s primary camera is herein referred to as RGB.
The UAV is also equipped with a Mapir Survey 3W (3W) multispectral sensor, with an external GPS used for geotagging. The sensor is a Bayer color filter array with 12 Megapixels and an image size of 4000 × 3000 pixels in TIFF format. The 3W records on three channels, namely orange, cyan, and near-infrared, with spectral peaks at 490 nm, 615 nm, and 808 nm, respectively. The 3W reflectance values are radiometrically calibrated to compensate for day-to-day variations in ambient light, using a calibrated reflectance panel (CRP). The CRP contains four diffuse scattering panels in black, dark gray, light gray, and white that are lab-measured for reflectance between 350 nm and 1100 nm. A unique reflectance profile is established for each panel, which converts an established wavelength to reflectance percent. An image of the CRP is captured on the 3W immediately before and after each flight. The CRP images are then used in post-processing to convert each pixel from bit depth to reflectance percent, using the panel profiles and metadata (gain/bias settings for each channel), allowing for a reflectance calibration of less than 1.0% error in most cases (MAPIR CAMERA, San Diego, CA, USA). The sensor dataset associated with the 3W is herein referred to as OCN.
2.3. Flooding Event and Aerial Data Collection
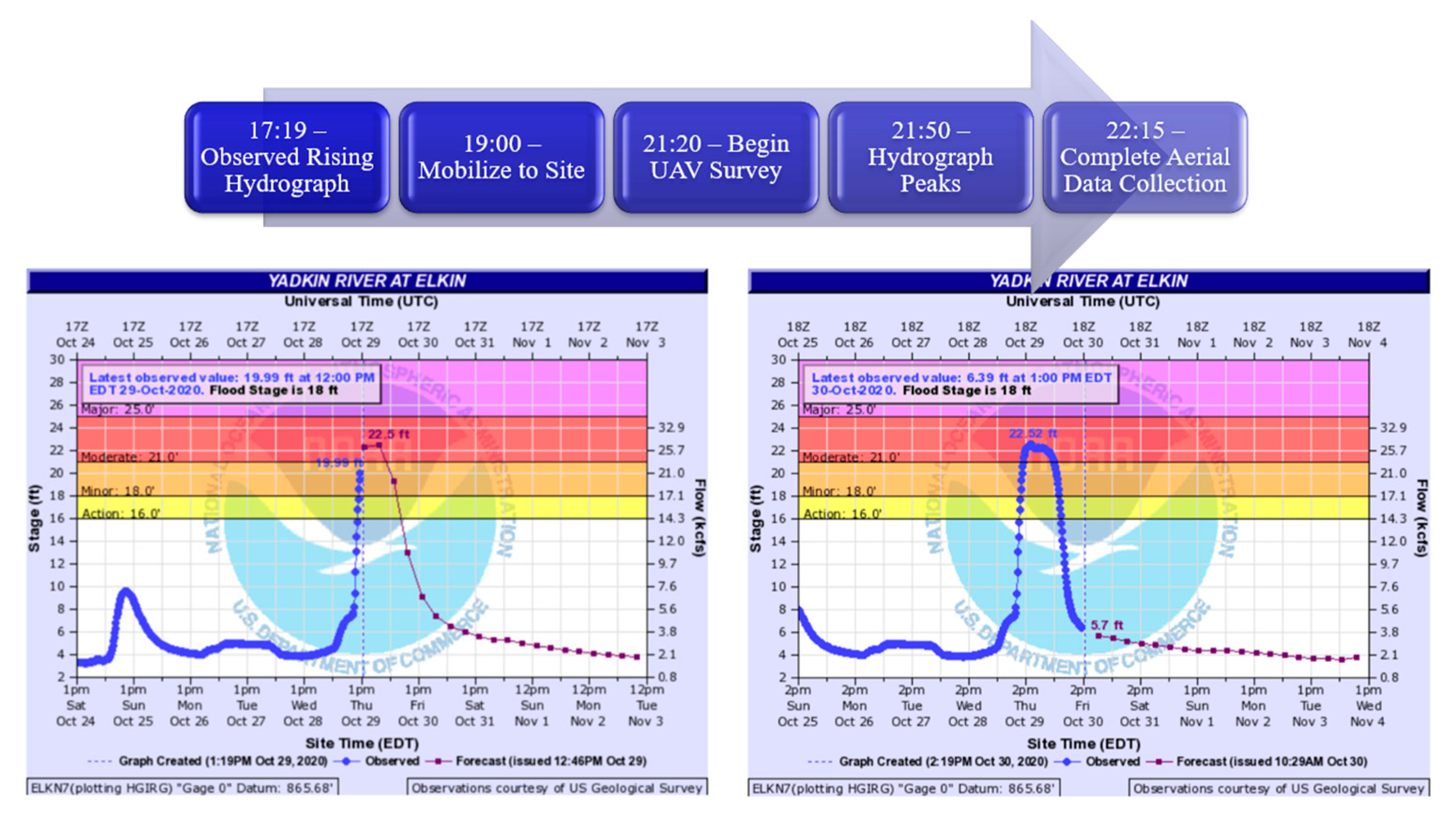
More than a dozen locations throughout the Carolinas during the 2020 hurricane season were monitored by the UAV data collection team, using the National Weather Service (NWS) River Forecast Center and NWS precipitation products. The Hurricane Zeta event and study area were finalized based on accessibility and data availability. The finalized aerial survey location was selected based on real-time correspondence with first responders of the Town of Elkin Police Department during the event. USGS gauge 02112250, located at 36°14′27.73″ N, 80°50′56.86″ W, was consulted to estimate the flood stage and time-to-peak (
Figure 3). The team arrived on-site during the rising limb of the hydrograph (
Figure 3) on 29 October 2020, at 20:00 UTC.
Prior to mobilizing to the site, two flight plans were created to automate UAV data collection to ensure optimal coverage and to minimize human error, using a flight-planning app created by Litchi. The flying height was set to 118.9 m above ground level (AGL) or 395.0 m above mean sea level (AMSL). The forward speed was set to 23.4 kph. The percent forward and side overlap were both set to 80%. The exposure time was set to 300/s to avoid image blurring for both the RGB and OCN datasets. Aerial data collection was conducted over two 25-min flights. The first flight commenced at 21:20 UTC and concluded at 21:45 UTC. The second flight commenced at 21:50 UTC and concluded at 22:15 UTC. Representatives from the United States Geological Survey (USGS) were also on-site monitoring the velocity, peak flow, and stage (
Figure 4). The UAV team coordinated with the USGS to determine an approximate time-to-peak of 21:50 UTC. Using the recorded conditions at the gauge and field-verified measurements from the USGS, it was confirmed that the peak stage elevation of 270.72 m (888.20 ft) was concurrent with the time of the aerial data collection. The resulting nominal ground sample distance (GSD) was 3.3 cm for RGB and 5.5 cm for OCN.
On 29 November 2022, the same UAV and sensor configuration were deployed using the same flight plans. This second aerial dataset was used to generate a digital elevation model (DEM) during non-flooding conditions, as well as to provide a post-event multispectral dataset. It should be noted that the supporting dataset should ideally be collected prior to the flooding event. However, capturing data after the event produces identical results but has the disadvantage of not being able to provide near-real-time information. The DEM data are further utilized in the FI model for the final results.
2.4. Ground Truthing Data
Two sets of ground-truthing data were collected for the study. The first set was collected during the flooding event on 29 October 2020 and consisted of ten geolocated floodwater depth measurements. A Trimble R10 RTK GNSS system and TSC5 data collector (Trimble, Sunnyvale, CA, USA) were used to collect position and elevation data for two ground-truthing datasets. For this process, Trimble Access was used to create a general survey in NAD 1983 State Plane North Carolina FIPS 3200 coordinates, and the RTKNet was used to establish a VRS session. The floodwater depth measurements were taken using a fiberglass grade rod after the second and final UAV flight. After depth was recorded, the position was recorded using the Trimble. An occupation time of 90 s was chosen to achieve the desired accuracy (approx. 1 cm horizontal and 3 cm vertical). The measurements were uniformly spaced within the downtown district, primarily in flooded roadways. These depth measurements were used for model validation and are discussed in
Section 4.3.
For the second set, twelve Ground Control Points (GCPs) were collected on 29 November 2020. The 29 October 2020 dataset was initially used to identify potential GCP locations by identifying objects or structures in the true-color orthomosaic that were present during flooding conditions, such as roadway paint markings, cracks in the sidewalk, centers of manholes, etc. The potential GCPs were further identified in the field on November 29, and their position was recorded using the Trimble, with an occupation time of 180 s. All twelve GCP positions each recorded three different times throughout the day. The final positions of the GCPs were calculated as the average of the three measurements to achieve the desired accuracy of approx. 1 cm horizontal and ≤3 cm vertical. The GCPs were then used to composite the 29 October 2022 dataset for generating the final results. The GCPs were also used to generate a digital elevation model (DEM) for the 29 November 2020 dataset during “leaf-off” conditions. The data processing is discussed in the following section.
2.5. Data Processing
Two types of data were processed in this study. The first type was two-dimensional multispectral data, including orthomosaics (RGB and OCN), and the second was three-dimensional elevation data (DEM). Both types were processed with the software Pix4DMapper Ver 4.5.12. All images taken by the UAV were processed with a Structure-from-Motion (SfM) and multi-view stereo approach [
43,
44]. These approaches allow the geometric constraints of camera position, orientation, and GCPs to be solved simultaneously from many overlapping images through a photogrammetry workflow. Twelve steps were required to generate the orthomosaics and DEM:
The RGB and OCN image datasets were acquired using a UAV platform on a gridded automated flight plan;
GCPs were collected as Trimble survey points with an accuracy of ±1 cm horizontal and ±3 cm vertical;
PPK processing was performed to provide RGB images with geotagged locations with an accuracy of ±5 cm;
OCN images were preprocessed to provide reflectance calibration;
RGB images were imported into Pix4DMapper, together with the information about acquisition locations (coordinates), including the roll, pitch, and yaw of the UAV platform. The information was used for the preliminary image orientation;
“Matching” in Pix4D comprised three steps: First, a feature-detection algorithm was applied to detect features (or “key points”) on every image. The number of detected key points depends on the image resolution, image texture, and illumination. Second, matching key points were identified, and inconsistent matches were removed. Third, a bundle-adjustment algorithm was used to simultaneously solve the 3D geometry of the scene, the different camera positions, and the camera parameters (focal length, coordinates of the principal point and radial lens distortions). The output of this step was a sparse point cloud.
The GCP coordinates were imported and manually identified on the images. The GCP coordinates were used to refine the camera calibration parameters and to re-optimize the geometry of the sparse point cloud.
Multi-view stereo image-matching algorithms were applied to increase the density of the sparse point cloud into a dense point cloud.
A digital surface model (DSM), which consists of a textured map, was derived from all images and applied to the polygon mesh that was used to create an orthomosaic.
The DSM and orthomosaics for RGB and OCN were exported from Pix4DMapper into ArcGIS Pro.
A digital elevation model (DEM) generated from the RGB point cloud and exported from Pix4DMapper into ArcGIS Pro. Alternatively, a DEM can be generated using LiDAR data for faster results. Both UAV-DEM-derived and LiDAR-derived results are explored in the following sections and are referred to as the full-integration (FI) mode and partial-integration (PI) mode, respectively.
RGB, OCN, and DEM were combined into a single raster file in ArcGIS Pro for analysis.
2.5.1. Model Data
The extraction model utilizes an 8-band raster dataset composited from three datasets: (1) very high resolution imagery (RGB), (2) multispectral imagery (OCN), and (3) topographic data (DEM/LiDAR). The RGB and OCN cameras record data in JPEG and TIFF format, respectively. The values are converted to reflectance percent by dividing the pixel values by the bit depth of the image format. RGB data are in raster format with reflectance stored as 8-bit digital numbers (DNs) ranging from 0 to 255. The data are decomposed into separate bands for red, green, and blue. The RGB DNs are normalized to values ranging from 0.00 to 1.00 by dividing by 255:
OCN data are also in raster format, with reflectance stored as 16-bit DNs ranging from 0 to 65,535. The data are provided on separate bands for orange, cyan, and near-infrared (NIR). The OCN data are also normalized by dividing by 65,535:
NDVI is a unitless fraction given as the difference of reflectance between NIR and red, divided by the summation of NIR and red [
45]. The authors theorized that the delineation of floodwater is enhanced in densely vegetated areas due to the low NDVI values of floodwater and high NDVI values of live green vegetation. In this study, orange was substituted for red to reduce the pixel noise associated with the high red reflectance of soil [
46]. NDVI is given, then, as follows:
The required topographic data depend on whether the fully integrated (FI) or partially integrated (PI) model is employed. The FI model utilizes a DEM derived from photogrammetry (UAV-DEM-derived), while the PI model utilizes a DEM derived from the LiDAR (LiDAR-derived). Finally, RGB, OCN, NDVI, and DEM/LiDAR are composited into a single raster dataset with 8 bands by the proposed algorithm explained in the following section.
2.5.2. Water Surface Extent Algorithm
Inundation, or water surface extent (WSE) mapping, is performed using a two-step algorithm based on the 8-band orthomosaic. Step one is optional and is used for riverine floods in which the user defines an elevation above mean seal level (AMSL) which eliminates pixels above the estimated flood stage. This step should be skipped for flash floods in which inundation is highly localized and may be independent of river stage. In this study, the flooding of the Yadkin River at Elkin, North Carolina, was the result of flood routing as opposed to direct precipitation. All flooding, then, was the result of overbank flow, in which the floodwater depth was directly correlated with the river stage. As such, a maximum elevation corresponding to the peak stage of 270.72 m (888.20 ft) AMSL was utilized from the forecasted conditions at the local USGS gauge 02112250. Band-8 pixels corresponding to elevations above 270.72 m were automatically annotated as non-floodwater and eliminated prior to step two. It should be noted that the user must consider the hydraulic profile of the river when selecting an elevation threshold. For smaller study areas (up to 1 km2), using an elevation threshold corresponding to a local stream gage should suffice; however, for larger study areas (over 1 km2), the elevation threshold should not be used or must be defined by the maximum potential WSE (most upstream cross-section) for the study reach. For the full model and partial model, the DEM and LiDAR were used to determine the maximum elevation threshold, respectively.
In step two, the user defines a spectral profile to extract floodwater pixels from the remaining dataset. The spectral profile is constructed from two or more spectral reflectance curves by manually sampling pixel values for area(s) of interest, using a lasso drawing tool. In this study, visual inspection was used to identify major color variations within the flooded areas. This led to establishing four spectral reflectance curves, as shown in
Figure 5, corresponding with (1) overbank flooding, (2) channel flooding, (3) overbank flooding covered in shadow, and (4) riverine flooding covered in shadow. Overbank flooding corresponds to inundation outside of the main channel banks. Overbank flooding appears in the model as sheet flow with a laminar surface. The flow is generally shallow (0–2 m deep), with little to no debris present. Channel flooding, on the other hand, appears in the model ranging from laminar to turbulent flow. Perturbations and debris are present throughout the floodwater surface. Both overbank and channel flooding appear in the true-color orthomosaic as reddish brown due to the iron-rich loamy soil typical of the region. The channel flooding is generally more consistent with higher values of red, green, and blue. Overbank flooding has higher values in orange, cyan, and near-infrared, likely due to the relatively shallow flow, in which grass, asphalt, and concrete are sometimes partially exposed. The shadows have the effect of uniformly lowering the brightness values across the spectrum for both overbank and channel flooding. NDVI values are invariably low across all four curves due to the lack of photosynthetic material in the water. The minimum and maximum pixel values extracted for each band are also presented in the box and whisker plots for
Figure 5. The complete spectral profile is provided in
Table 1 in the column “Extraction Range”. It should be noted that the distribution of data is less for OCN due to the narrow-filtered bands of the multispectral sensors.
After the maximum elevation and spectral profile are defined, the water extraction model works by masking or eliminating pixels outside the specified ranges, as specified in
Table 1, chronologically. First, DEM/LiDAR values greater than 270.72 m (888.20 ft) AMSL are eliminated, followed by the pixels with NDVI less than 0.2 and within the extraction range for each band. Any pixels not eliminated are automatically annotated as floodwater pixels. The model output includes a binary raster file, with 0 representing non-floodwater pixels and 1 representing floodwater pixels. The result is a water surface extent (WSE), or inundation map. It should be noted that, while the model will extract floodwater pixels, it will not extract non-floodwater pixels unless a spectral reflectance curve is generated specific to non-floodwater. For example, a wet detention pond, which is generally free from sediment, will have a significantly different profile from sediment-rich floodwaters and will not be extracted. The output layers are shown in
Figure 6.
2.5.3. Water Depth Algorithm
A water depth map is generated from the WSE (inundation) map and a bare-earth topographic dataset (DEM/LiDAR), using a 6-step process, which is illustrated by
Figure 7.
Step (1): Non-floodwater pixels are removed from the raster dataset by setting 0 values to null.
Step (2): The raster is converted into a feature layer; this procedure generates polygons for contiguous patches of floodwater, including individual floodwater pixels. Polygons with an area below a user-defined threshold are removed. In this study, a minimum area of 3 m2 was used to remove smaller patches.
Step (3): Points are generated at a user-defined interval along the edges of the polygons or the edge of the floodwater extent where depth is assumed to be 0.00 m. For this study, points were generated every 3 m. Elevation data are extracted from the DEM at each point, representing the floodwater elevation at that point.
Step (4): Points are connected to form a triangulated irregular network (TIN), using linear interpolation. Each triangle forms a plane representing the floodwater elevation, capturing variations in the water surface profile.
Step (5): The TIN is converted to a raster format, depicting a floodwater elevation map.
Step (6): Finally, the DEM is subtracted from the floodwater elevation map to provide a floodwater depth map.
Figure 8 illustrates the TIN-to-depth process for a selected portion of the model.
2.6. Model Output
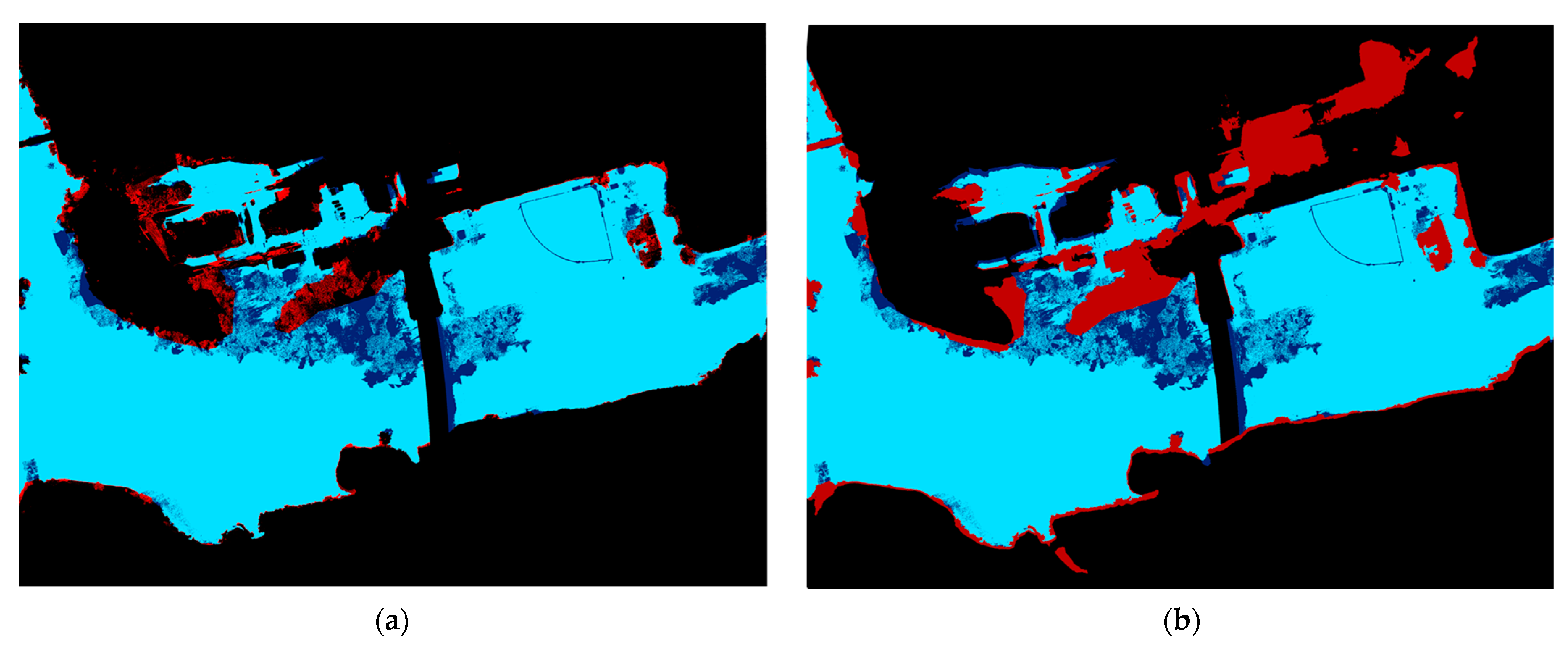
The final output for both the FI and PI models consists of a single raster file containing the modeled inundation and depth with a resolution of 3.3 cm, and the output results summarized in
Table 2. For the FI model, the input raster was reduced from 396,158,137 total pixels to 101,462,379 floodwater pixels (25.6%); thus, 74.4% of the total pixels were eliminated. For the PI model, the input raster was reduced from 396,158,137 total pixels to 129,453,581 floodwater pixels (32.7%); thus, 67.3% of the total pixels were eliminated. For both models, inundation is represented by the spatial distribution of the remaining pixels, while depth is stored as the pixel value. While the models have no inherent limitations for inundation mapping, depth calculations are generally limited to floodwaters outside of the main channel due to the inability of photogrammetry and most LiDAR devices to penetrate water, with the exception of green LiDAR [
47]. The bathymetric surface, therefore, cannot be mapped, and the area within the wetted width of the channel is clipped prior to analysis. After removal, the FI model depth ranges from 0.00 m to 9.14 m, with a mean depth of 2.25 m. The PI model depth ranges from 0.00 m to 5.76 m, with a mean depth of 1.25 m. It should be noted that the mean depth of the PI model is significantly lower due to a higher commission error, which is discussed in
Section 3.2.
5. Conclusions
This study introduces a novel method, referred to as UAV-FIDM, for near-real-time inundation extent and depth mapping for flooded events, using an inexpensive, UAV-based multispectral remote-sensing platform. The study proposes two methods including a fully integrated (FI) model that utilizes the UAV sensors to create an elevation dataset versus a partially integrated (PI) model that leverages existing datasets such publicly available LiDAR. The trade-offs between the full and partial models were evaluated. The advantages of the FI model include temporal currency of the pre-event elevation dataset and greater accuracy with respect to inundation and depth mapping due to higher spatial resolution and increased density of ground control points. The main disadvantage of the full model is that, in order to operate it in near-real-time, a pre-event elevation dataset must be collected. This requires additional sensors, planning, and foresight to collect the requisite level of data within the study area before flooding occurs. The PI model, on the other hand, provides greater flexibility and applicability because it does not require the user to anticipate where flooding may occur provided that the elevation data are readily available for the flooded area. The disadvantage is that pre-existing elevation data sources may not be available or recent and may be of lower quality than UAV-derived elevation datasets. The implications of such trade-offs are provided for the consideration of researchers.
UAV-FIDM is designed to be applicable for urban environments under a wide range of atmospheric conditions, including light precipitation and winds up to 50 km/h. It has an advantage over traditional remote-sensing platforms because it can fly beneath cloud cover while providing highly detailed maps for areas up to 3 square kilometers with a resolution of 6 cm or better. The limitations of UAV-FIDM include a processing time of up to 6 h, a relatively small coverage area, and the requirement of an operator to be on-site during the flooding event. The performance varies with land use, with the best performance being associated with lightly vegetated areas, including cropland and grassland, and the worst performance being associated with heavily wooded areas, such as forests or dense scrublands. This work reveals the shortcomings of UAV-FIDM in areas of dense vegetation or shadows and puts forth multiple suggestions to mitigate these issues.
Overall, UAV-FIDM is suggested as a supportive tool for mapping flood extent and depth in various fields, including hydrology and water management. Future studies will include the use of a thermal sensor to overcome the challenges presented by shadows and mitigate the errors associated with dense vegetation by adding a decision-making structure. Additionally, a detailed hydrographic survey will be used for validating the depth model. The methodology was tested and applied during an actual flooding event for Hurricane Zeta during the 2020 Atlantic hurricane season and shows that the UAV platform is capable of predicting inundation with a reasonably low total error of 15.8% and yields flooding depth estimates accurate enough to be actionable by decision-makers and first responders.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}