2.2. The RORB Model
The history of the Australian runoff routing model dates back to the 1960s with the introduction of the Laurenson runoff routing model (LRRM) by Laurenson, in 1964 [
14]. The primary objective of the model was to simulate the surface runoff hydrograph of a catchment using rainfall excess while considering the catchment’s lag and its variation with discharge.
Laurenson’s runoff routing model was a groundbreaking innovation because it introduced the concept of nonlinearity in catchment response. This was a significant departure from earlier models, which assumed that the catchment lag and response time were constant and linearly related to flow. Laurenson’s model recognized that catchment response was more complex than previously thought and could vary with catchment flow. As a result, his model was able to capture more accurately the nonlinearities inherent in catchment hydrology, making it a valuable tool for predicting flood flows and designing infrastructure. The LRRM model did not consider the baseflow process in the model.
Following on from Laurenson’s initial model, a series of other models with a similar structure were developed, with the calculation of rainfall excess and nonlinear routing of this excess through a series of non-linear conceptual storages. The first version of the RORB program was released as RORT in 1975 [
15]. Many further versions have been released since then, but the basic difference between all these and the LRRM model is that the catchment is represented by a distributed network of sub-catchments and channel reaches rather than by isochrones. A detailed description of the RORB model is given in the user manual [
6].
Australian Rainfall and Runoff 2019 [
3] recommends the use of the Lyne and Hollick filter to extract baseflow from the total observed hydrograph before the RORB modelling. The filtered baseflow is then added to the estimated quickflow hydrograph to obtain the total design hydrograph.
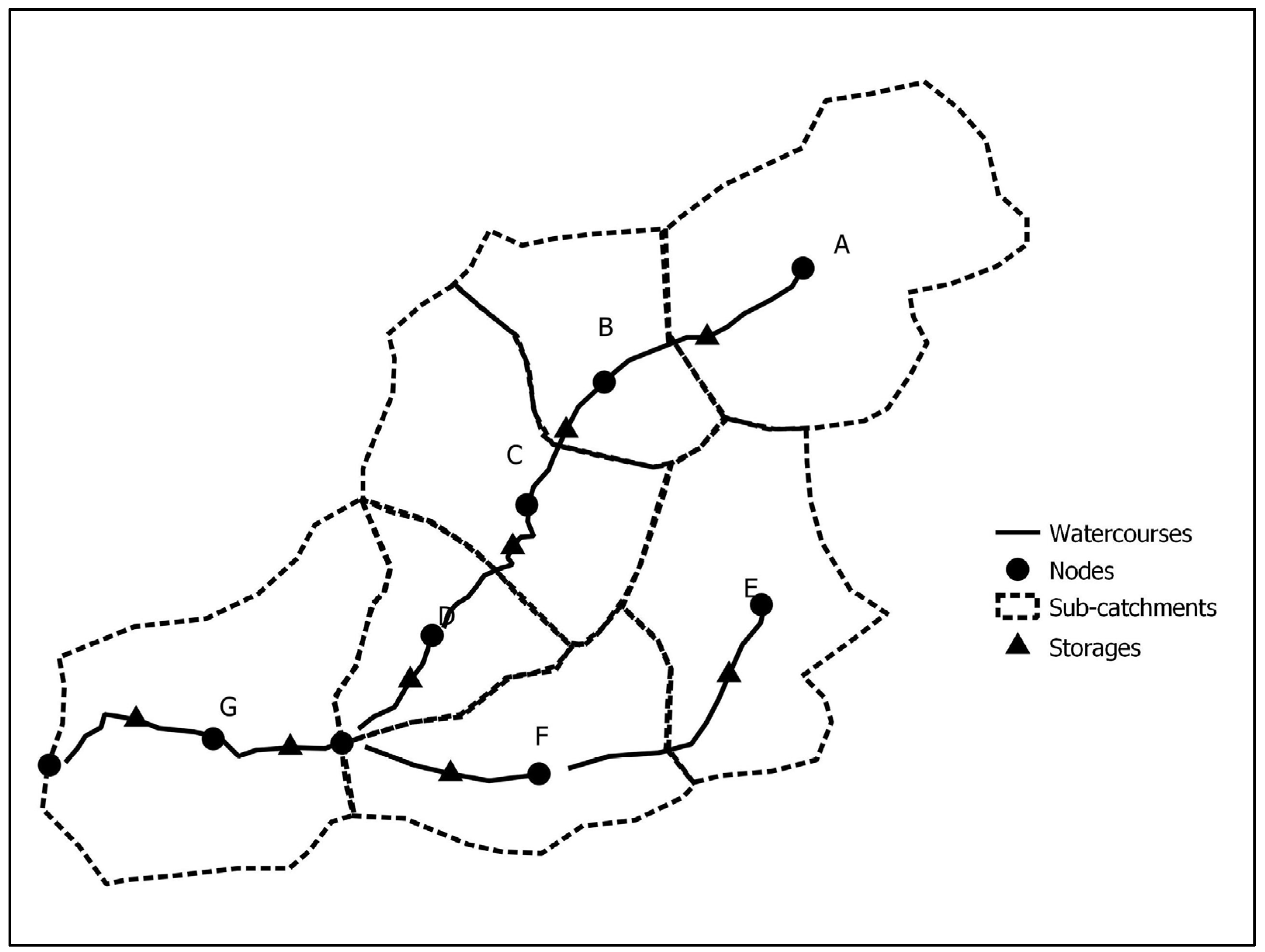
Rainfall is applied at the centroid of each sub-catchment (at A, B, C, D, E, F, and G in
Figure 1), and runoff is then calculated by subtracting losses. The losses can be accounted for by using two types of loss models: the initial loss–constant continuing loss (IL-CL) model and the initial loss–proportional loss (IL-PL) model.
The resultant hydrograph is then routed through each channel reach storage (
S) where
S is in the form of
, and the value of
k is determined as
kc, an empirical coefficient assigned to the overall catchment, multiplied by the relative delay time
where
d is the length of the individual storage reach, and
dav is the mean flow distance in the catchment.
where
S is the storage (m3);
k is a dimensional empirical coefficient (related to the storage delay time);
Q is the outflow discharge (m3/s);
m is a dimensionless exponent;
d is the length of the individual storage reach (km);
dav is the mean flow distance within the catchment (km).
For this study, we used the initial loss–proportional loss model based on prior research by Kemp and Hewa [
16] that demonstrated its superior performance compared to the initial loss–continuing loss model.
2.3. The RRR Model
The RRR (rainfall-runoff routing) model was developed in the 1990s [
13] but has not been widely used, as no dedicated software was developed until recently. The model represents the catchment as a series of conceptual storages to simulate the flow of water through the catchment. It has ten equal sub-areas with ten equal linear storages representing channel flow. The rainfall excess of each sub-area is added as an input at the sub-area centroids. It is assumed that multiple processes occurring in the catchment can be represented by a separate series of 10 equal sub-areas and 10 non-linear storages representing the hillside runoff processes contributing to each of the 10 channel inflow points. Each runoff process is assumed to follow a different path. For each process, losses are extracted from the total rainfall to provide rainfall excess. An initial loss (IL) is used followed by a proportional loss (PL).
Kemp [
13] found that there were generally up to three runoff processes in evidence, and it can be assumed that these represented the following:
Baseflow. This is the traditional concept of baseflow and is what is generally referred to as the steady-state regional groundwater runoff; it is the slowest flow process contributing to the hydrograph. It is known that the lag between rainfall and groundwater runoff to the stream discharge can be substantial, due to the long flow path length in the groundwater system.
Slowflow, being interflow or throughflow, which can also be labelled as capillary fringe flow. This mechanism acts with a lag from rainfall to stream flow that is less than that of the baseflow, due to the quicker response time from rainfall to runoff into the stream.
Fastflow, most probably similar to Hortonian overland flow, either from a part of the catchment area or the full catchment area. The response time of this mechanism is short compared with the two above, as no infiltration and flow through the soil and rock flow is involved.
Each storage process path has a series of ten equal areas and ten equal storages with an excess rainfall input of the form:
where
S is the storage (m3);
kp is a dimensional empirical coefficient (related to the storage delay time);
Q is the outflow discharge (m3/s);
m is a dimensionless exponent.
There will be a separate value of kp for each process, and these will be labelled by a process number as above. For example, for three processes they are labelled kp1, kp2 and kp3, and losses are also labelled by process number. Each process can have an initial loss (IL1, IL2, and IL3) and a proportional loss (PL1, PL2, and PL3).
At each channel inflow point, there is a storage in the channel of the form:
where
S is the storage (m3);
k is a dimensional empirical coefficient (related to the storage delay time);
Q is the outflow discharge (m3/s).
The channel storage is thus linear (storage delay time not varying with the flow).
2.5. Case-Study Catchments
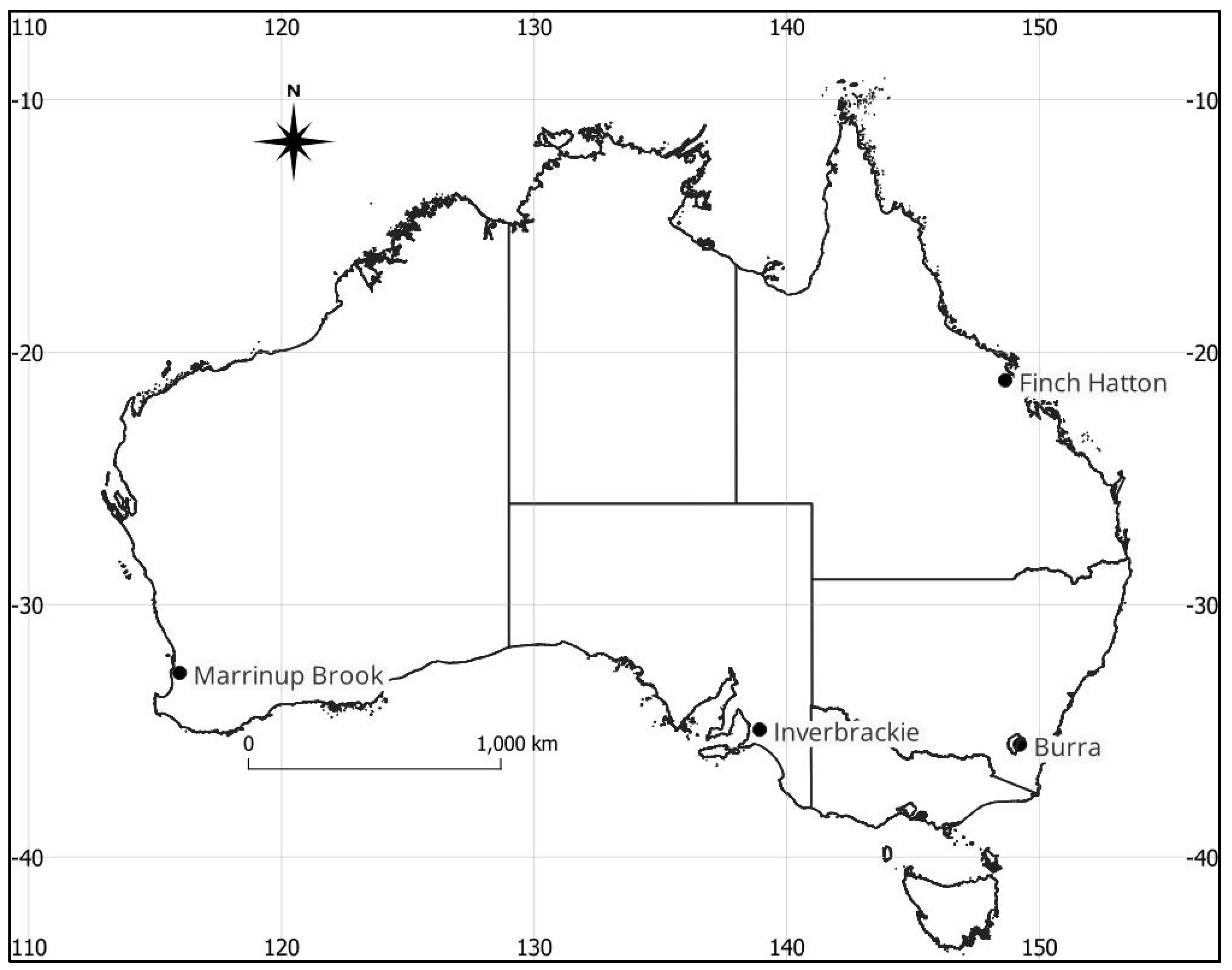
Four catchments were selected for this study to represent different climatic conditions across Australia, and thus test the models on a wide range of catchments. To ensure that catchment size did not affect the results, the selected catchments were ideally less than 40 km
2 in size. In addition, the pluviometer and flow records were examined to ensure that the chosen catchments had reliable data. The selected catchments included Inverbrackie Creek in South Australia, Finch Hatton Creek in Queensland, Marrinup Brook in Western Australia, and Burra Creek in southern New South Wales. For each catchment, where possible, approximately 12 storm events (6 for calibration and 6 for validation) that produced the highest flows within the period of record were identified and extracted. An exception was made for the Marrinup Brook catchment in Western Australia, where only winter storms were selected. This is because south-west Western Australia catchments have a significant change in response between winter and summer storms [
17] and choosing only winter storms ensured consistency in the modelling.
The catchment locations are shown in
Figure 2, and the attributes are summarised in
Table 1. Though all these catchments had good pluviometer and flow records and represented different climate zones, the catchment areas of two of the selected catchments are slightly over the upper limit of 40 km
2.
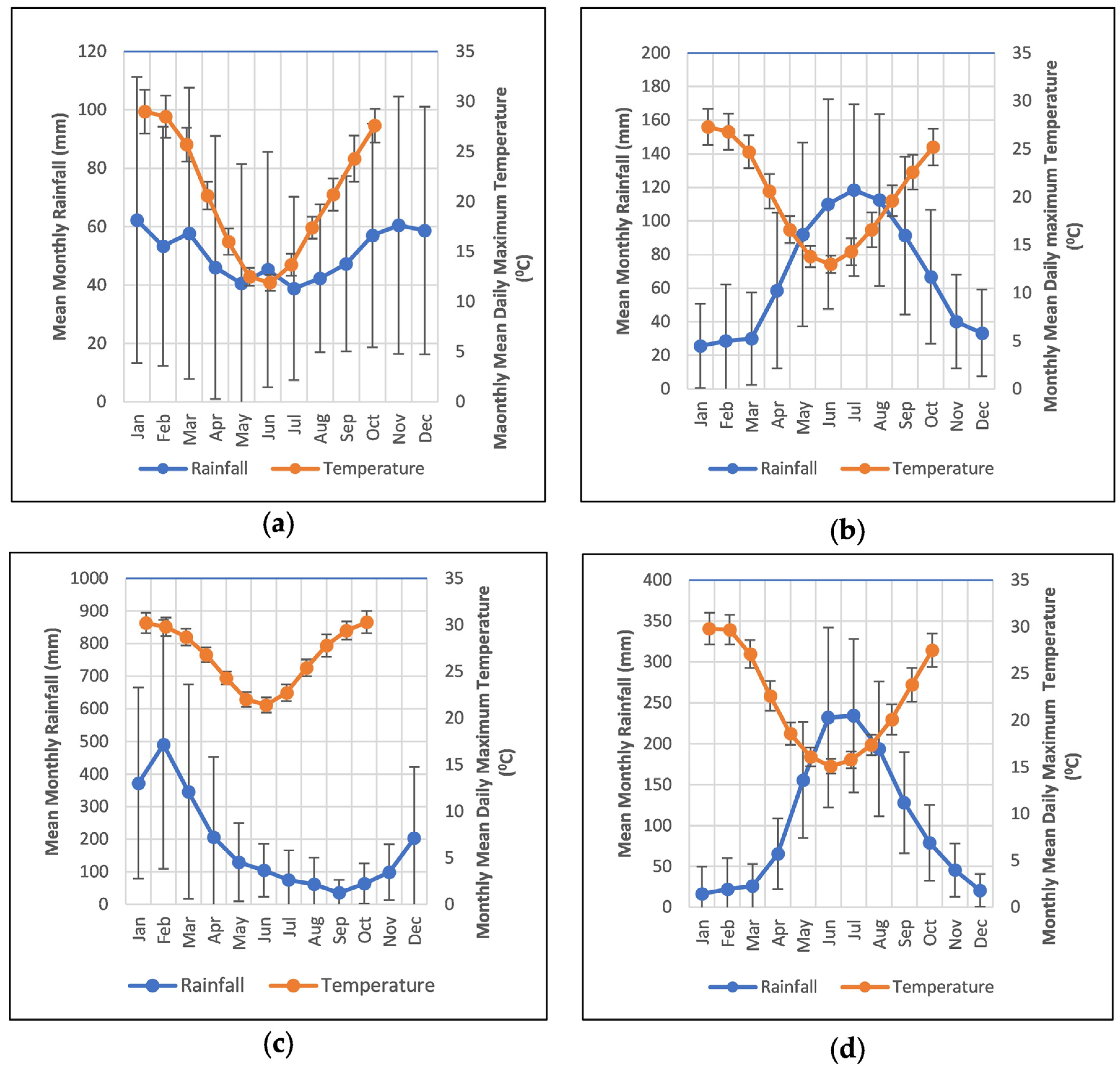
Figure 3 shows the mean monthly rainfall and mean daily maximum temperature for each catchment, together with the standard deviation of both.
A summary of the features of each catchment is given next, including a climate classification in accordance with Stern [
18]. Land use descriptions are in accordance with the Australian Agricultural and Resource Economics and Sciences classification [
19].
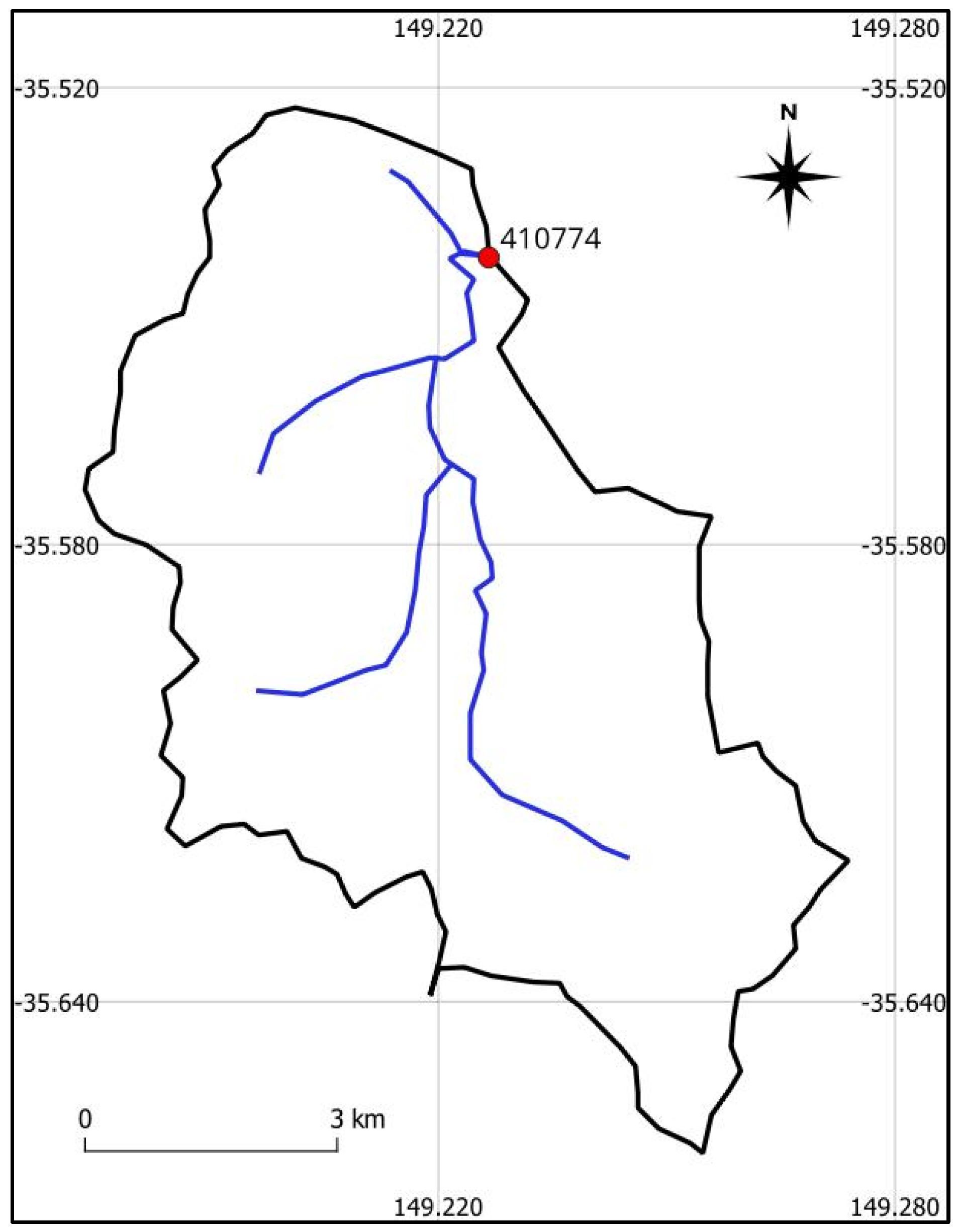
Figure 4 shows the Burra Creek catchment. Burra Creek is a tributary of the Murrumbidgee River, located in south-eastern New South Wales, just south of Canberra. The catchment covers 68.7 square kilometres, encompassing a landscape of gently rolling hills, a mix of open grazing land, and native forest. The creek flows through the catchment, serving as a crucial source of water for agricultural irrigation and supporting the local ecosystems. The catchment is characterised by around 40% hilly and forested (nature conservation) terrain, with the remaining land primarily utilised for grazing. Elevations range from 850 m to 1100 m. The region is classified as having a temperate climate with no dry season.
For the investigation, 12 flood events were extracted from the streamflow records from 1998 to 1995. The extracted events have an average recurrence interval (ARI) varying from 1.5 years to 12.5 years. Seven events were used for calibration, and five for verification. The highest ARI of the calibration events was 9 years, while the highest ARI of the verification events was 12.5 years.
The catchment has a mean annual rainfall of 604 mm, runoff of 63.9 mm, and potential evapotranspiration of 1090 mm.
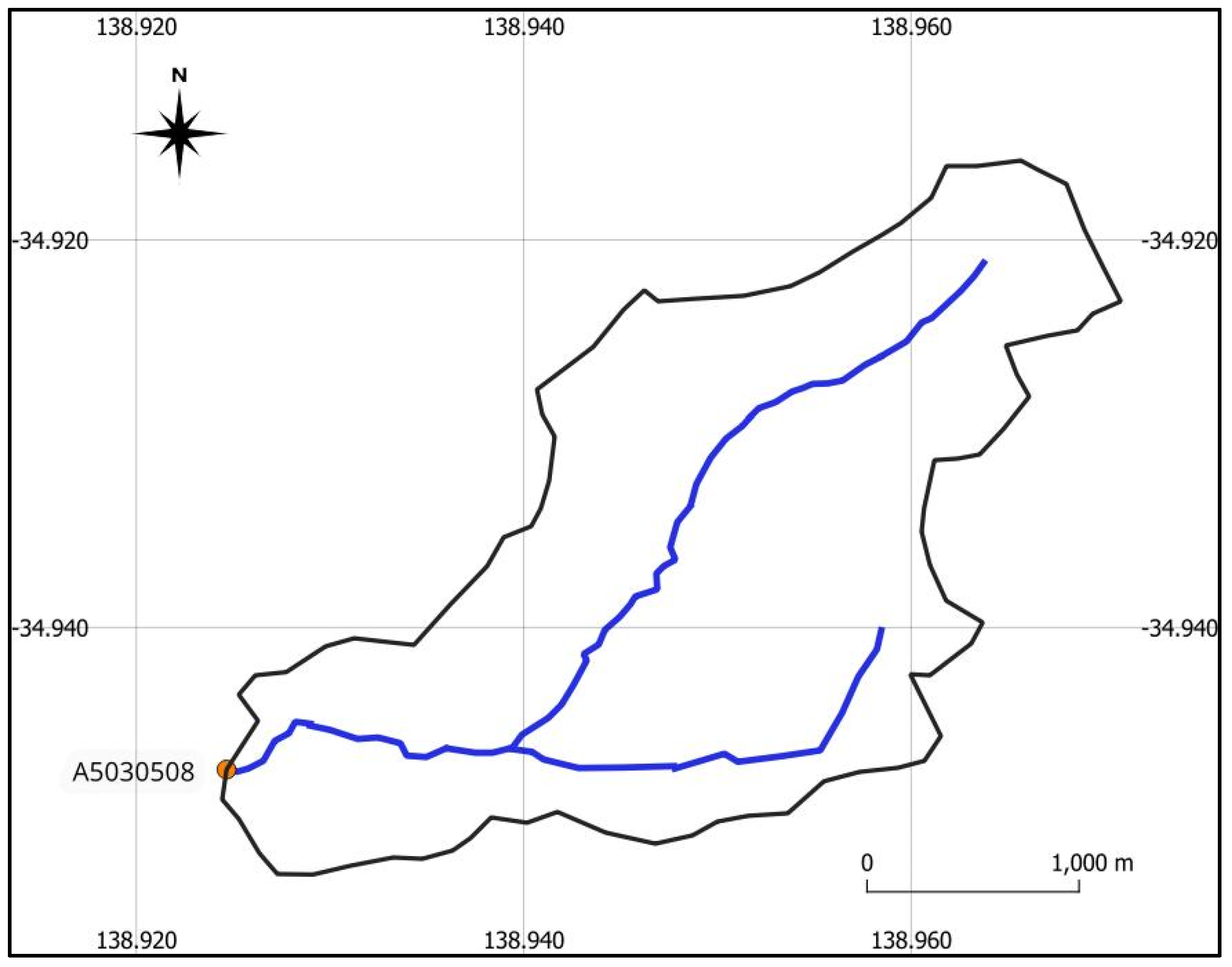
Figure 5 shows the Inverbrackie Creek catchment. Inverbrackie Creek rises to the north and east of Woodside in the southern Mount Lofty Ranges of South Australia and flows west into the Onkaparinga River south of Woodside. The catchment covers 8.44 square kilometres and has a single station recording both rainfall and stream flow. The region is moderately hilly, with an elevation range from 430 m to 530 m. The main land use in this small catchment is livestock grazing (44%), with dairying (24%) and horticulture, mainly vineyards (18%), being the other significant land uses, along with vineyards, urban living areas, forests, and areas of remnant native vegetation.
For this investigation, a total of 12 flood events were extracted from the streamflow records spanning from 1987 to 1996. The extracted events have an average recurrence interval (ARI) ranging from 0.4 years to 11.3 years. Six events were used for calibration, and the remaining ones were used for verification. The highest ARI of the calibration events was 11.3 years, while the highest ARI of the verification events was 4.7 years. The region has a temperate climate with a distinct dry summer season.
The catchment has a mean annual precipitation of 807 mm, runoff of 9.3 mm, and potential evapotranspiration of 1106 mm.
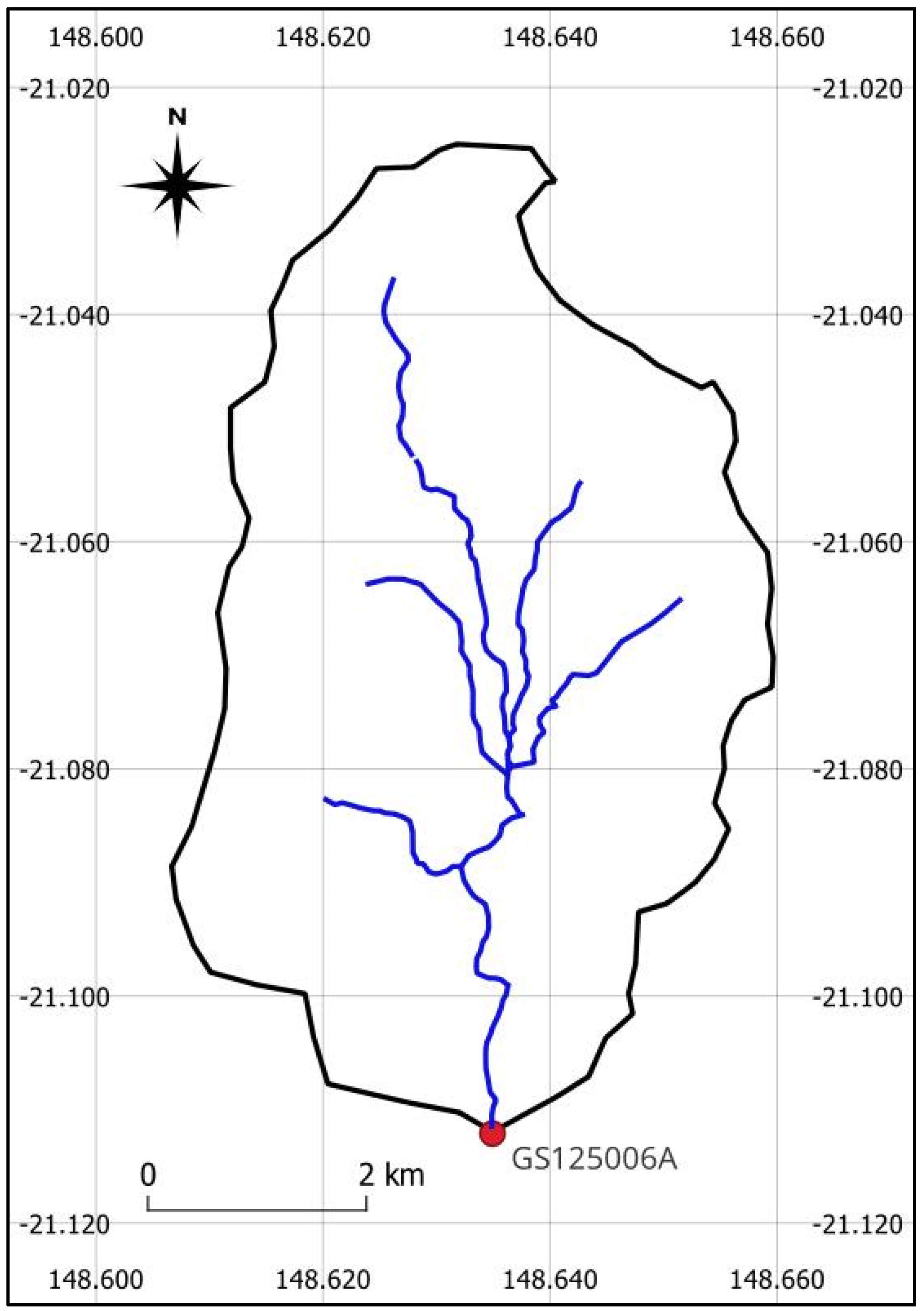
Figure 6 shows the Finch Hatton catchment. The Finch Hatton catchment lies within tropical north Queensland and covers an area of 35.7 km
2, with a single station measuring stream flow and rainfall. With steep terrain, the catchment has an elevation range from 100 m to 1150 m within the catchment length of 10 km. The annual rainfall varies significantly within the catchment, with the top of the catchment receiving an estimated 2180 mm compared to 1660 mm at the gauging station. The catchment has some grazing, but the majority is nature conservation, managed resource protection, or other minimal use. The region has a subtropical climate with no distinct dry season.
For the investigation, a total of 12 flood events were extracted from the streamflow records spanning from 1990 to 2017. Six flood events were used for calibration, ranging from a 5-year ARI to a 150-year ARI. Five events were used for verification, ranging from a 3.8-year ARI to a 7-year ARI.
The catchment has a mean annual runoff of 1508 mm and potential evapotranspiration of 1755 mm.
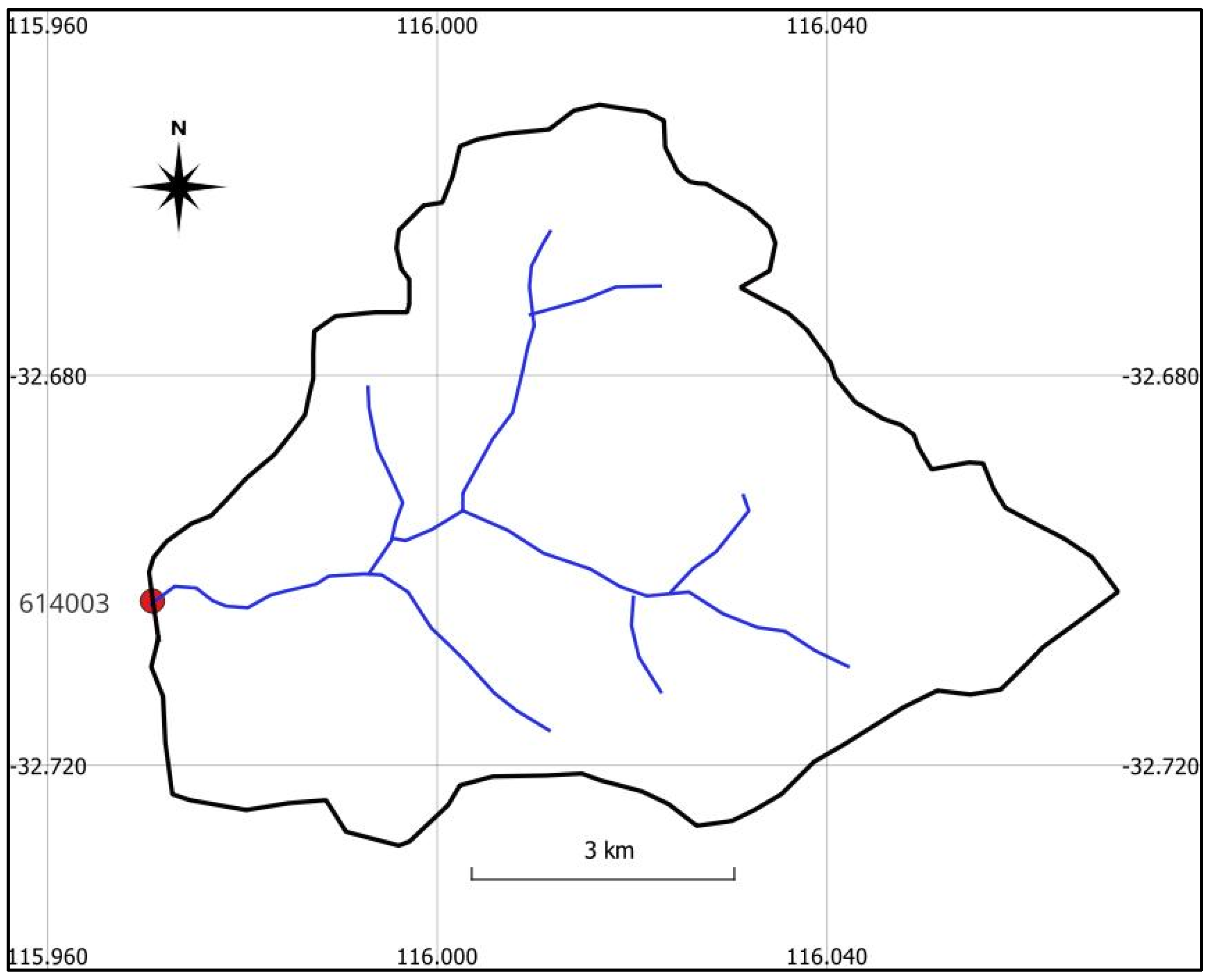
Figure 7 shows the Marrinup Brook catchment. The Marrinup Brook catchment is in the south-western region of Western Australia, covering an area of 45.6 km
2. A single station measures both flow and rainfall within the catchment. The catchment is undulating, with elevations ranging from 80 m to 320 m, and is primarily covered with forests.
The catchment has a small amount of dryland cropping but is mainly production native forest and other minimal use. The catchment is known for its diverse flora and fauna, including various wetland and riparian habitats and several threatened or endangered species, such as the Western Swamp Tortoise and Carnaby’s Black-Cockatoo. For the investigation, six flood events between 1978 and 1992 were used for calibration, ranging from a 9-year ARI to a 23-year ARI. Additionally, six events were used from the same period for verification, ranging from a 1.8-year ARI to an 11.7-year ARI. The region has a temperate climate with a distinct dry summer season.
The catchment has a mean annual rainfall of 1225 mm, runoff of 24.4 mm, and potential evapotranspiration of 1321 mm.
2.6. Statistical Analysis
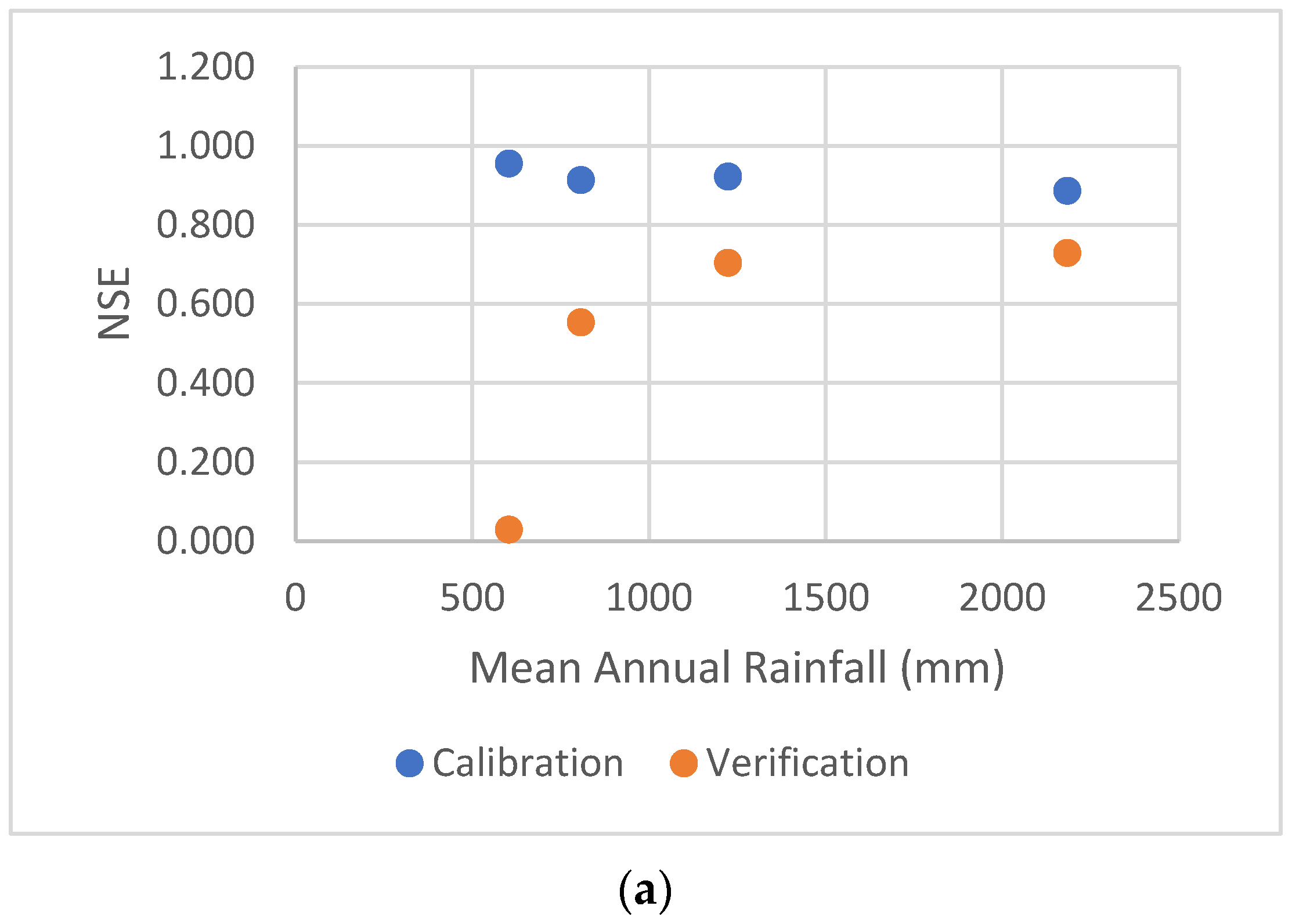
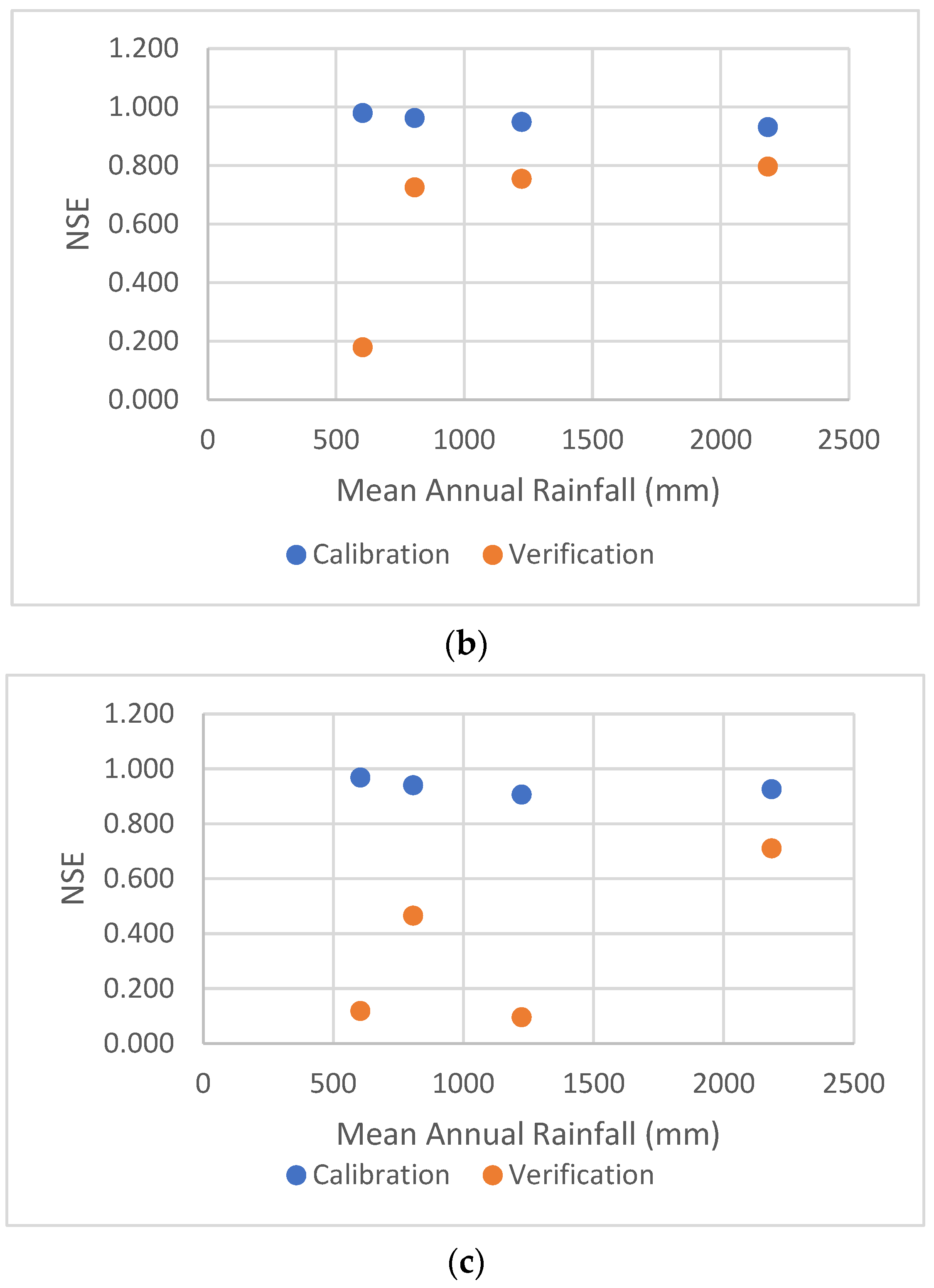
We have chosen the Nash–Sutcliffe efficiency (NSE) [
20] and the absolute peak flow error (APFE) to assess the performance of the models. The NSE is defined by Equation (4).
where
is the mean of observed discharges during the period;
is the modelled discharge at time t;
is the observed discharge at time t.
The percentage absolute peak flow error (APFE) is defined as the absolute value of the ratio of the estimated to measured peak flow, given as a percentage.
These two measures were chosen because they are dimensionless, allowing for comparison of the level of fit across different events. This is not achievable using statistical indicators such as RMSE (root mean square error), MBE (mean bias error), and MAE (mean absolute error).
2.7. Baseflow Extraction and Model Calibration
As mentioned earlier, RORB is a single-process model that focuses solely on surface runoff (quickflow). Consequently, effectively addressing baseflow becomes a significant concern during the calibration and verification. In this study, the approach recommended in Australian Rainfall and Runoff 2019 [
3] was adopted, involving the separation of baseflow from the total hydrograph before the RORB modelling. The separation was achieved using a 9-pass Lyne and Hollick filter [
21], as described in Hill et al. [
22].
For most catchments and events, a 15 min time step was utilized along with a Lyne and Hollick filter parameter value of 0.981. This value corresponds to a filter parameter of 0.925 when considering an hourly time step, aligning with the ARR 2019 recommendation. However, due to Marrinup Brook’s considerably longer response time, a 1 h time step was employed when modelling this catchment.
The RRR and RORB models were calibrated to achieve the best fit to the observed hydrographs. In the RRR model calibration, the least-squares difference between the predicted and observed hydrographs was minimized, while in the RORB model calibration, the average absolute ordinate error was minimized as it was given as an output for model runs. Both RRR and RORB aimed to maximize the Nash–Sutcliffe efficiency (NSE). By contrast, the HEC-HMS model integrates the objective function to maximize the NSE, eliminating the need for users to define it as required in RORB and RRR.
2.8. Model Verification
After calibrating the models for a series of events, a mean value for storage and loss parameters was required to be applied with the models for verification events.
To enable greater weight for better calibration hydrograph fit, the individual event parameter values were weighted by a measure for the goodness of fit for each individual event (a weighting factor) before the mean parameter values were determined. The NSE could not be used for this, as the range was only from 0 to 1.0. Instead, a weighting factor (WF) was calculated for each event by dividing the event observed peak flow by the calibration root mean square error, as defined by Equation (5). The error in the hydrograph fit is thus normalized. A better fit will give a higher weighting factor. Note however that a perfect fit (zero error) will yield an undefined WF. This did not happen in this study.
This approach enabled the calculation of weighted mean values for both the storage and loss parameters. Subsequently, model verification was carried out using the weighted mean parameter values on a set of independent events.
where
WF Is the weighting factor for the calibration event;
q0 is the observed flow at each time step;
qc is the calculated flow at the time step;
n is the number of time steps or observations;
Qop is the observed peak flow.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}