
Single-View Measurement Method for Egg Size Based on Small-Batch Images
 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
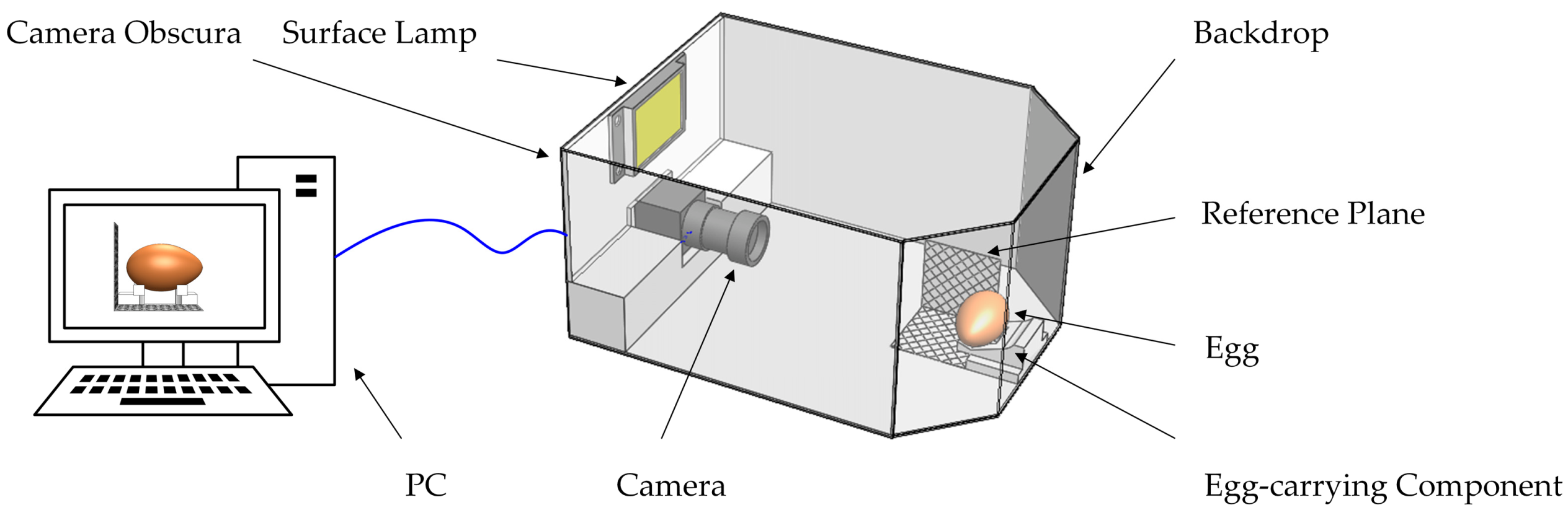
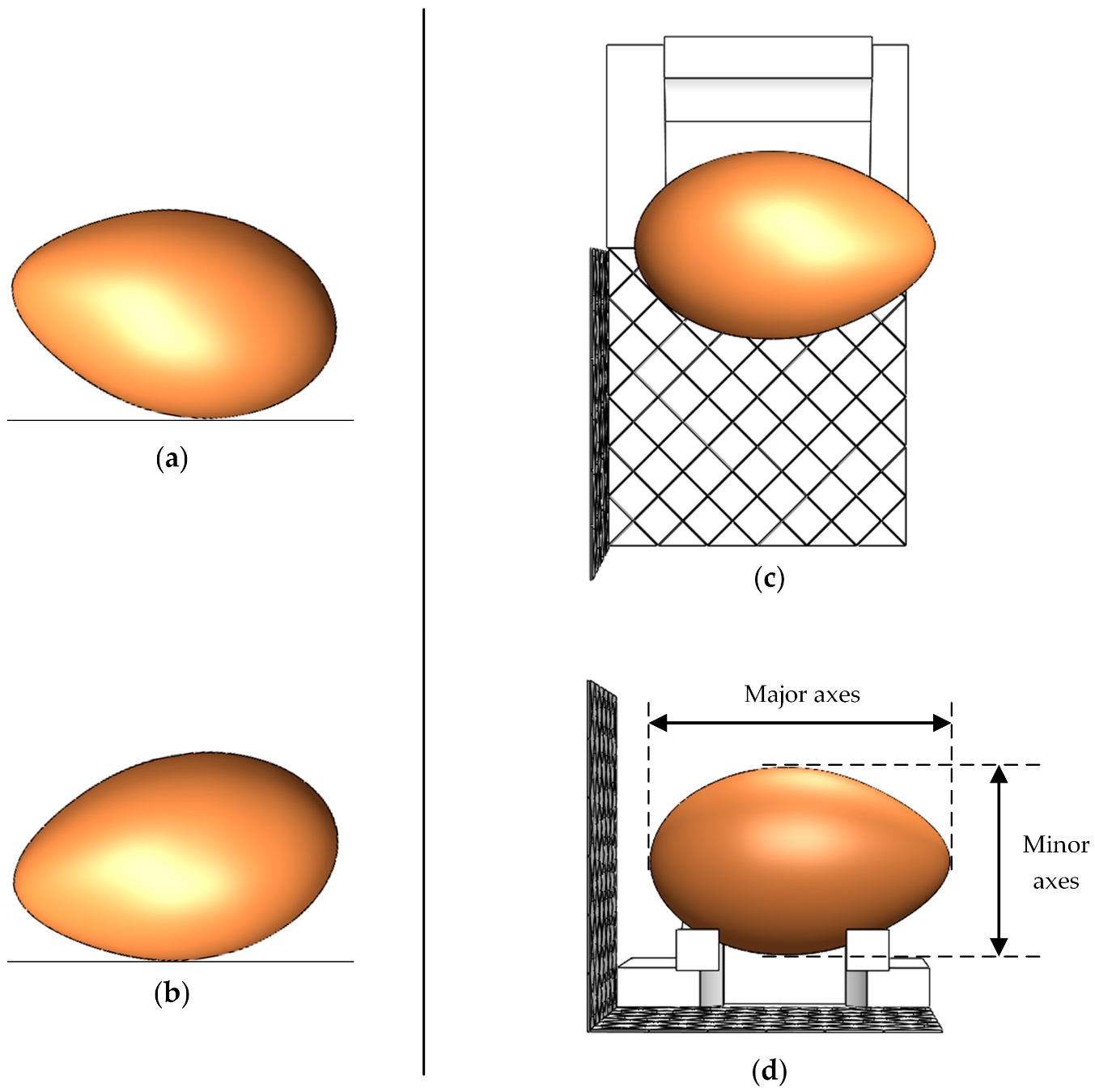
2.1. Experimental Materials
2.2. Single-View Measurement for Eggs
- (1)
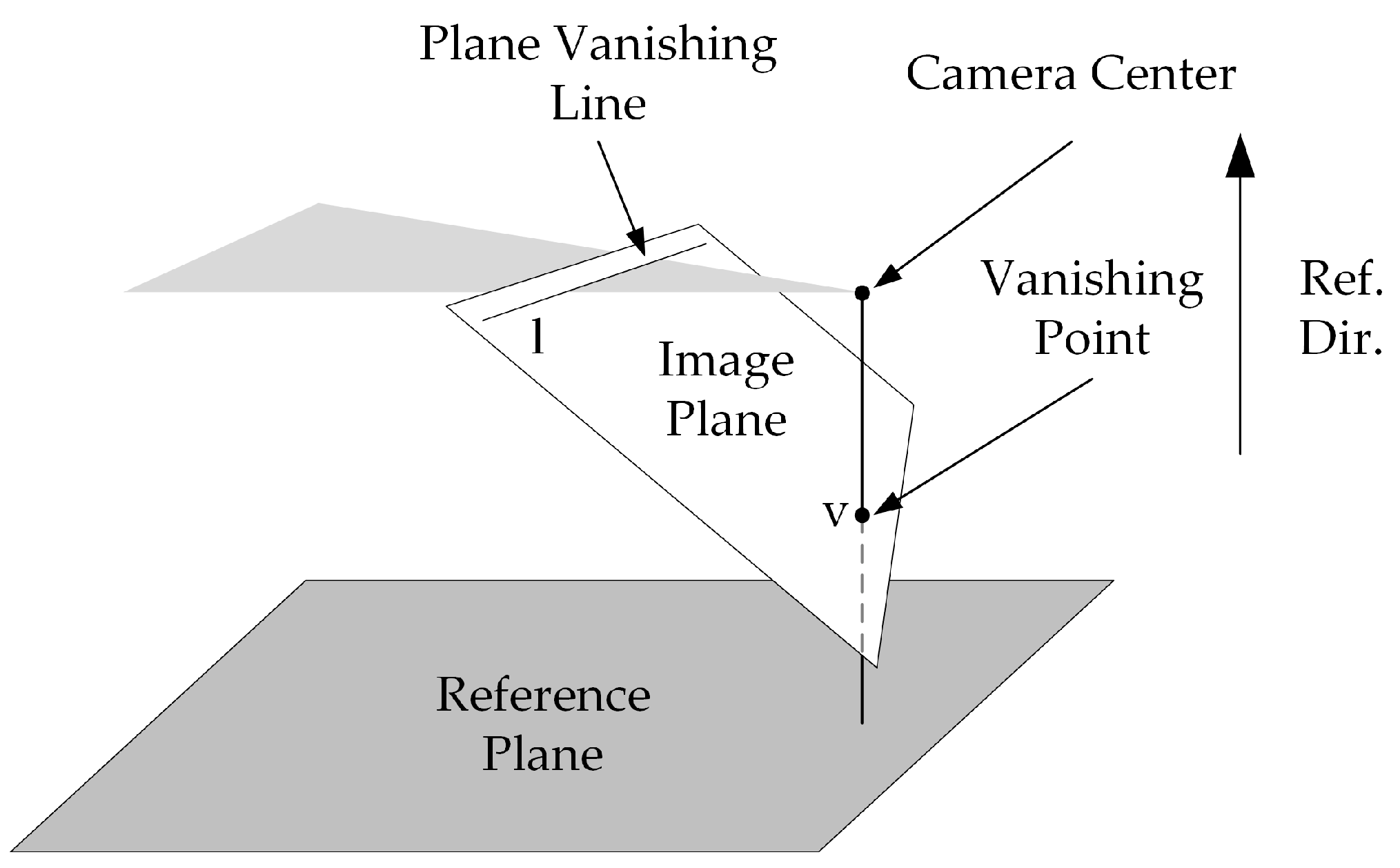
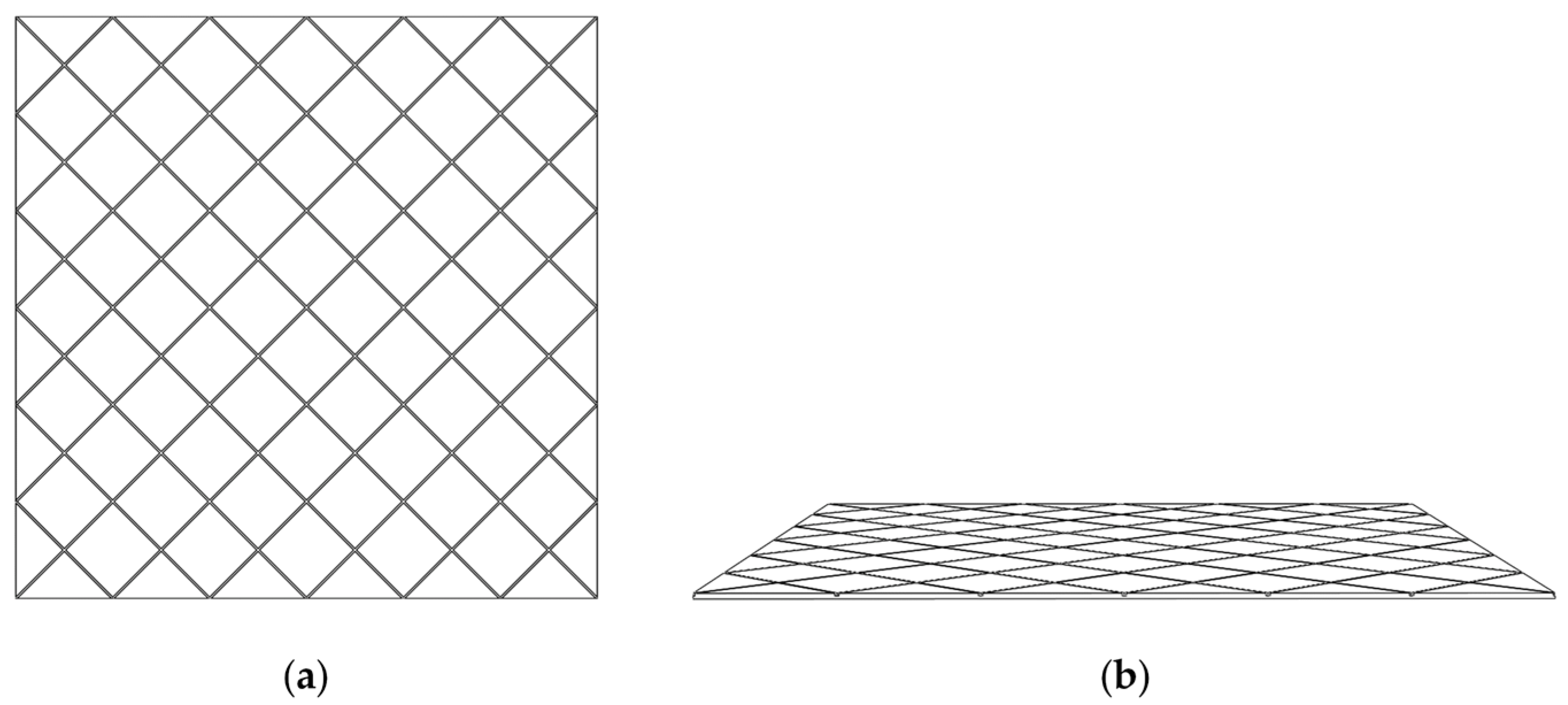
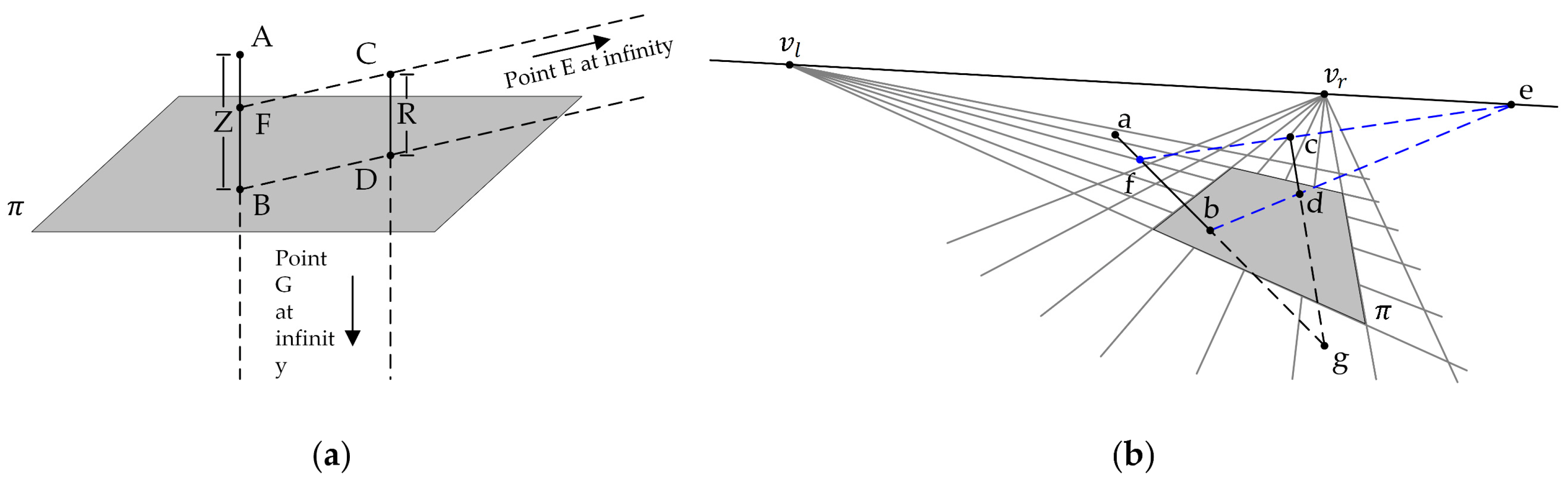
- Single-View measurement principle
- (2)
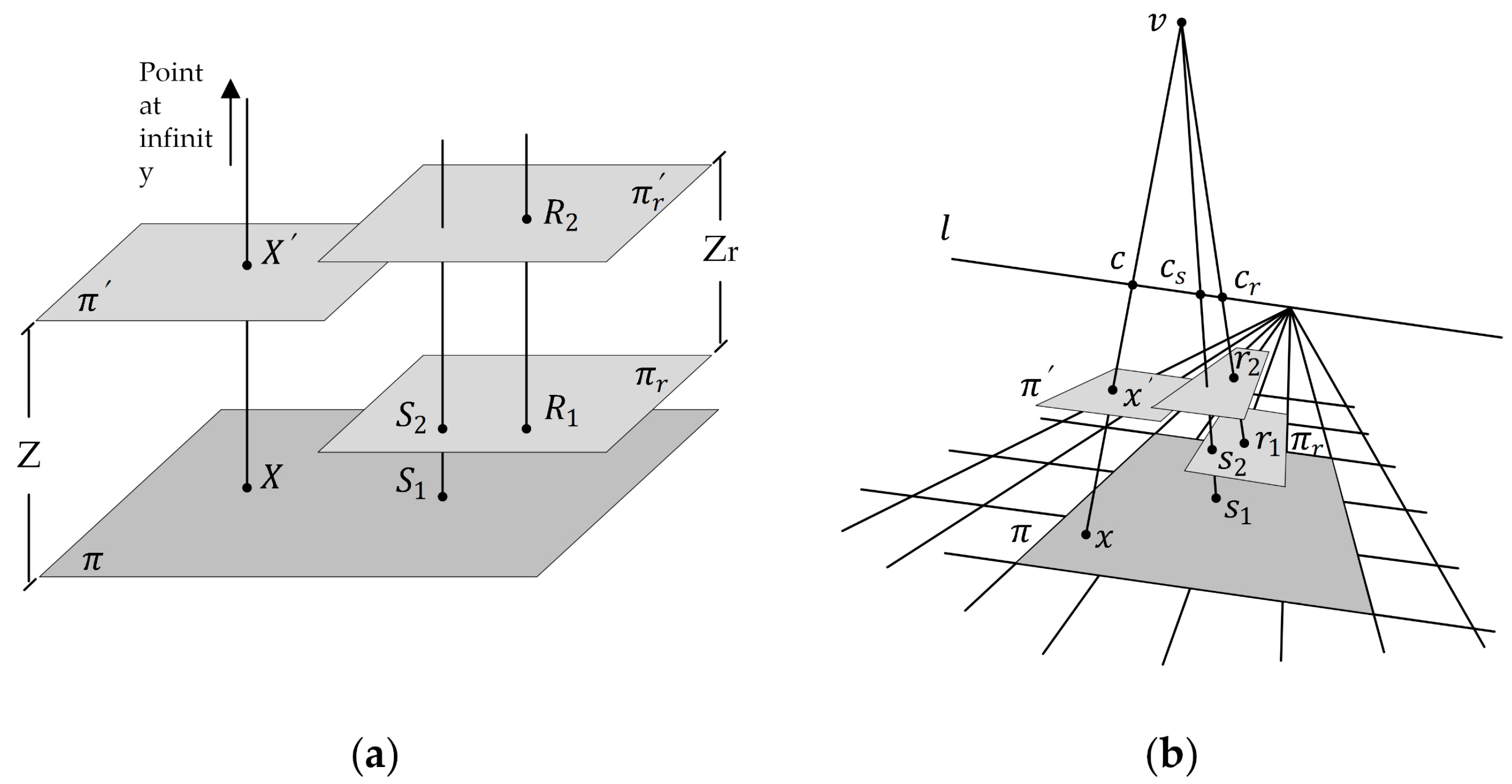
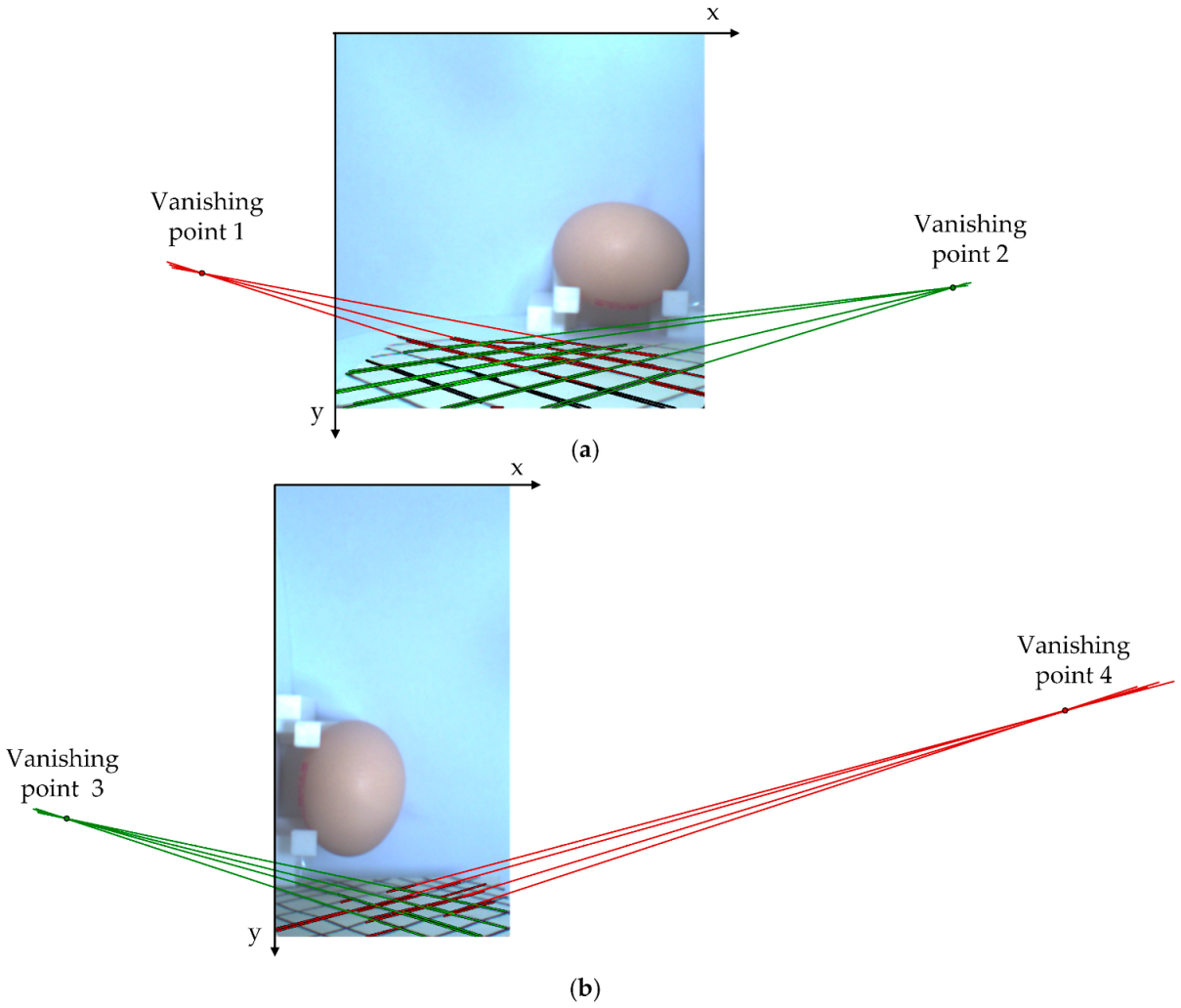
- Vanishing point determination and measurement principle of egg images
2.3. Egg Image Segmentation in Small Batches
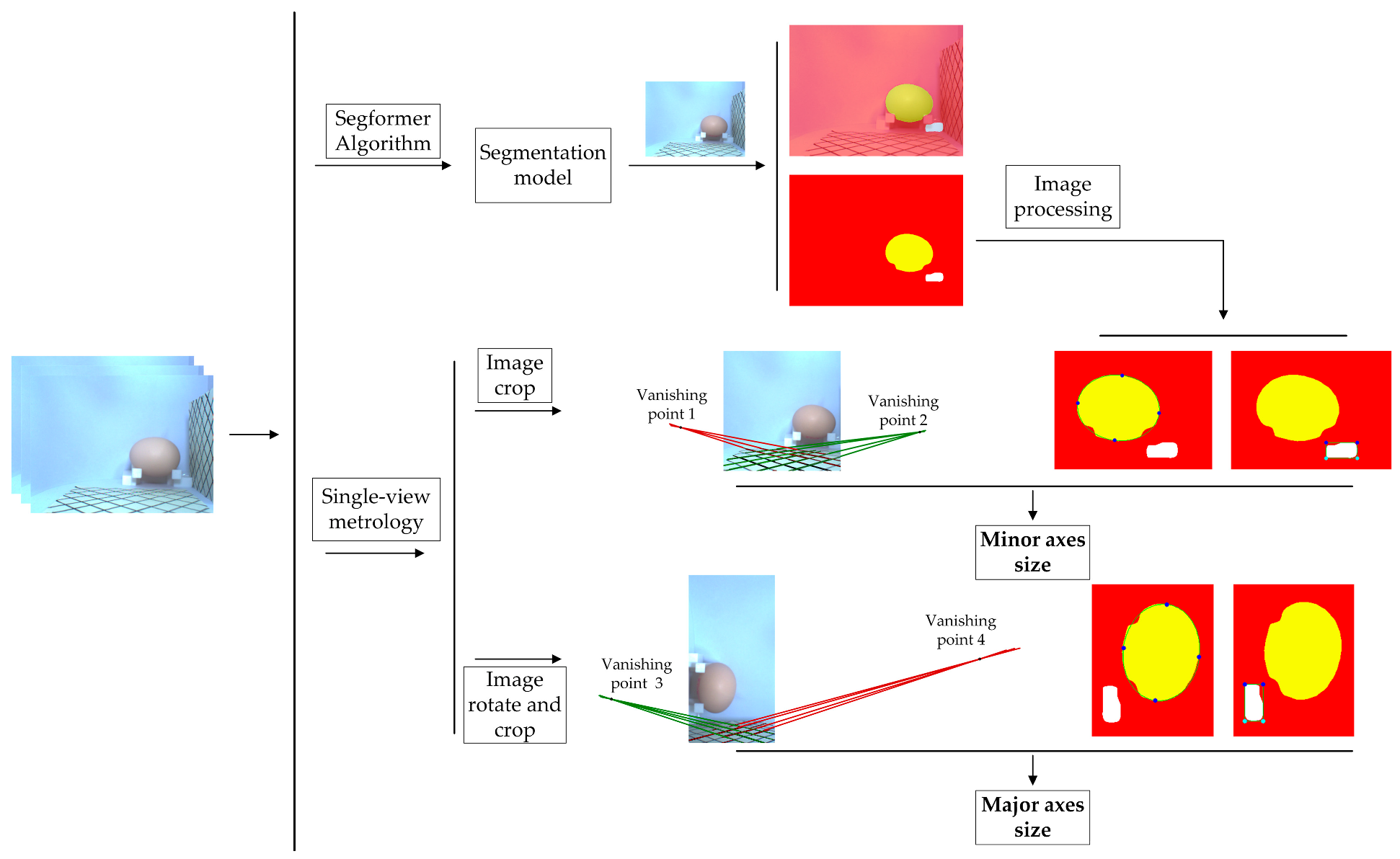
2.4. Single-View Measurement Framework and Evaluation Metrics
3. Results
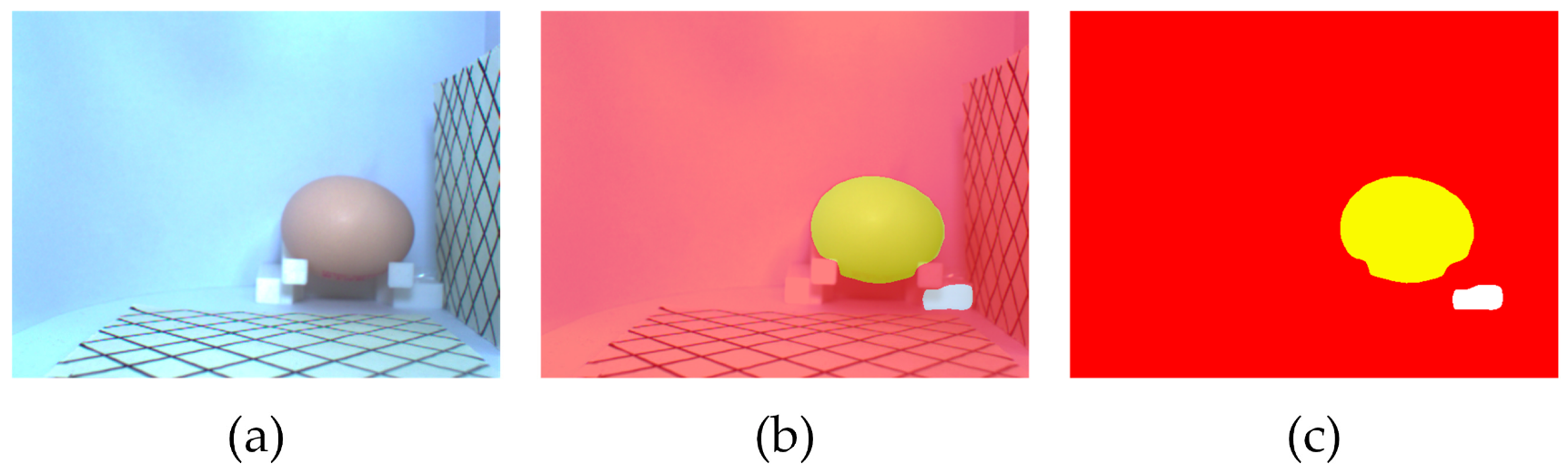
3.1. Segmentation Result of Egg Images
3.2. Vanishing Point Image
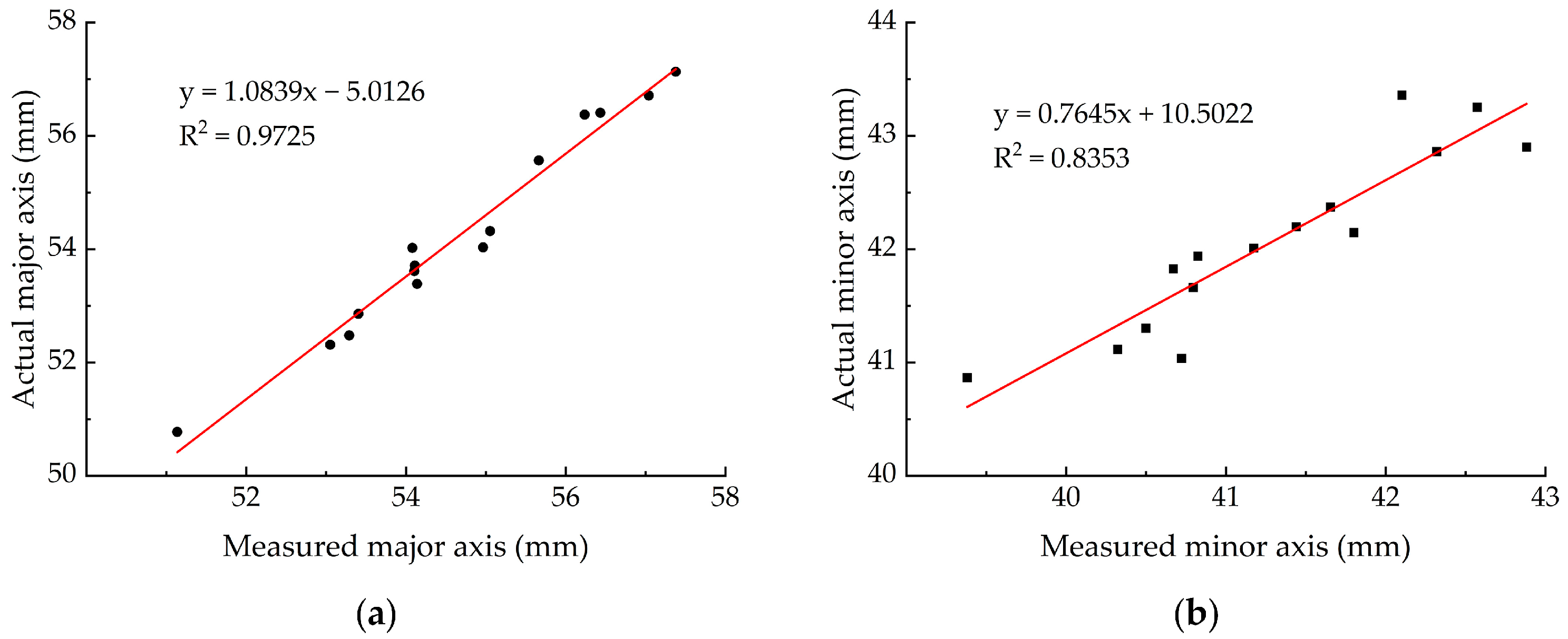
3.3. Single-View Measurement Result of Egg Size
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deng, H.; Liu, Y.M.; Wen, Y.X.; Wang, S.C. Research on method of detecting egg size by machine vision. J. Huazhong Agric. Univ. 2006, 25, 452–454. [Google Scholar] [CrossRef]
- Zhou, W.Z.; Feng, X.H. Shape identification of fertile eggs by using computer vision. Trans. CSAE 2000, 16, 126–130. [Google Scholar] [CrossRef]
- Omid, M.; Soltani, M.; Dehrouyeh, M.H.; Mohtasebi, S.S.; Ahmadi, H. An expert egg grading system based on machine vision and artificial intelligence techniques. J. Food Eng. 2013, 118, 70–77. [Google Scholar] [CrossRef]
- Vasileva, A.V.; Gorbunova, E.V.; Vasilev, A.S.; Peretyagin, V.S.; Chertov, A.N.; Korotaev, V.V. Assessing exterior egg quality indicators using machine vision. Br. Poult. Sci. 2018, 59, 636–645. [Google Scholar] [CrossRef]
- Soltani, M.; Omid, M.; Alimardani, R. Egg volume prediction using machine vision technique based on pappus theorem and artificial neural network. J. Food Sci. Technol. 2015, 52, 3065–3071. [Google Scholar] [CrossRef] [Green Version]
- Erwin, P.Q.; Delfin, C.S.; Pepito, M.B. Single-line automated sorter using mechatronics and machine vision system for Philippine table eggs. Afr. J. Agric. Res. 2018, 13, 918–926. [Google Scholar] [CrossRef] [Green Version]
- Harnsoongnoen, S.; Jaroensuk, N. The grades and freshness assessment of eggs based on density detection using machine vision and weighing sensor. Sci. Rep. 2021, 11, 16640. [Google Scholar] [CrossRef]
- Ma, X.L.; Yi, S.J. Unfertilized eggs verification system before hatching based on embedded system and machine vision. Trans. Chin. Soc. Agric. Mach. 2011, 42, 187–192. [Google Scholar]
- Okinda, C.; Sun, Y.; Nyalala, I.; Korohou, T.; Opiyo, S.; Wang, J.; Shen, M. Egg volume estimation based on image processing and computer vision. J. Food Eng. 2020, 283, 110041. [Google Scholar] [CrossRef]
- Nasiri, A.; Omid, M.; Taheri-Garavand, A. An automatic sorting system for unwashed eggs using deep learning. J. Food Eng. 2020, 283, 110036. [Google Scholar] [CrossRef]
- Aboonajmi, M.; Mostafaei, Z. Non-destructive quality assessment of table eggs for online sorting. In Informatics in Poultry Production; Khaliduzzaman, A., Ed.; Springer: Singapore, 2022; pp. 35–51. [Google Scholar]
- Narushin, V.G.; Romanov, M.N.; Griffin, D.K. Egg and math: Introducing a universal formula for egg shape. Ann. N. Y. Acad. Sci. 2021, 1505, 169–177. [Google Scholar] [CrossRef]
- Liao, H.B. Egg shape standard curve and its piecewise function equation. J. Math. Discov. 2022, 2, 1–31. [Google Scholar] [CrossRef]
- Criminisi, A. Single-view metrology: Algorithms and applications. In Proceedings of the Pattern Recognition: 24th DAGM Symposium, Zurich, Switzerland, 16–18 September 2002. [Google Scholar]
- Wang, G.; Wu, Y.; Hu, Z. A novel approach for single view based plane metrology. In Proceedings of the 2002 International Conference on Pattern Recognition, Quebec City, QC, Canada, 11–15 August 2002. [Google Scholar]
- Peng, K.; Hou, L.; Ren, R.; Ying, X.H.; Zha, H.B. Single view metrology along orthogonal directions. In Proceedings of the 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010. [Google Scholar]
- Mendonca, P.R.S.; Kaucic, R. Single view metrology: A practical example. In Proceedings of the 2008 IEEE Workshop on Applications of Computer Vision, Copper Mountain, CO, USA, 7–9 January 2008. [Google Scholar]
- Chen, Y.; IP, H.H.S. Single view metrology of wide-angle lens images. Vis. Comput. 2006, 22, 445–455. [Google Scholar] [CrossRef]
- Wang, G.H.; Hu, Z.Y.; Wu, F.C.; Tsui, H.T. Single view metrology from scene constraints. Image Vis. Comput. 2005, 23, 831–840. [Google Scholar] [CrossRef]
- Hoo, J.E.; Lim, K.C. Accuracy and error study of horizontal and vertical measurements with single view metrology for road surveying. ARPN J. Eng. Appl. Sci. 2016, 11, 7872–7876. [Google Scholar]
- Ali, A.; Hassan, A.; Ali, A.R.; Khan, H.U.; Kazmi, W.; Zaheer, A. Real-time vehicle distance estimation using single view geometry. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Snowmass Village, CO, USA, 1–5 March 2020. [Google Scholar] [CrossRef]
- Díaz, E.; Arguello, H. An algorithm to estimate building heights from Google street-view imagery using single view metrology across a representational state transfer system. In Dimensional Optical Metrology and Inspection for Practical Applications V; SPIE: Baltimore, MD, USA, 2016. [Google Scholar] [CrossRef]
- Kansal, S.; Mukherjee, S. Automatic single-view monocular camera calibration-based object manipulation using novel dexterous multi-fingered delta robot. Neural Comput. Appl. 2019, 31, 2661–2678. [Google Scholar] [CrossRef]
- Criminisi, A.; Reid, I.; Zisserman, A. Single view metrology. Int. J. Comput. Vis. 2000, 40, 123–148. [Google Scholar] [CrossRef]
- Nieto, M.; Salgado, L. Real-time robust estimation of vanishing points through nonlinear optimization. In Real-Time Image and Video Processing 2010; SPIE: Brussels, Belgium, 2010. [Google Scholar]
- Xie, E.; Wang, W.; Yu, Z.; Anandkumar, A.; Alvarez, J.M.; Luo, P. SegFormer: Simple and efficient design for semantic segmentation with transformers. Adv. Neural Inf. Process. Syst. 2021, 34, 12077–12090. [Google Scholar] [CrossRef]
- Zhang, S.Q.; Tu, J.; Sun, L.; Cai, J.R.; Gu, H.F.; Gu, H. Online detection method of eggs major-minor-axis and mass. Trans. Chin. Soc. Agric. Mach. 2014, 45, 204–209. [Google Scholar] [CrossRef]
- Widiasri, M.; Santoso, L.P.; Siswantoro, J. Computer vision system in measurement of the volume and mass of egg using the disc method. IOP Conf. Ser. Mater. Sci. Eng. 2019, 703, 012050. [Google Scholar] [CrossRef]
- Zhu, Z.H.; Ye, Z.F.; Tang, Y. Nondestructive identification for gender of chicken eggs based on GA-BPNN with double hidden layers. J. Appl. Poult. Res. 2021, 30, 100203. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Egg-Carrying Method | Design Innovation | Advantages | |
|---|---|---|---|
| Mahmoud Soltani [5] |  | The tangency between the cross-sectional circle of the fresh egg and the triangle of the component is used to obtain the true profile of the fresh egg. The design idea of this component can be used for the adjustment of the fresh egg posture of the production line. | The components designed in this paper allow for a single view to obtain the real outline of the egg and for the adjustment of the egg’s attitude using gravity. |
| Erwin [6] |  | ||
| Harnsoongnoen [7] |  | ||
| This paper |  |
| Parameter or Resource | Value or Model |
|---|---|
| Checkpoint_file | pspnet_r50-d8_512×1024_40k_cityscapes_20200605_003338-2966598c.pth |
| Optimizer | SGD |
| Batch size | 8 |
| Initial learning rate | 0.01 |
| Train, validate, and test images | 60, 15 and 15 images |
| Total iterations | 5000 |
| Backend | Pytorch 1.7 |
| Python | 3.6 |
| Operation system | Windows 10 |
| GPU | NVIDIA RTX 2080 Ti |
| Class | (‘background’, ‘egg’, ‘ref’) |
| Palette | (255, 0, 0), (250, 250, 0), (255,255, 255) |
| Class | IoU (%) | PA (%) |
|---|---|---|
| Background | 99.72 | 99.88 |
| Egg | 97.11 | 98.34 |
| Reference | 89.22 | 93.71 |
| Serial Number | Minor Axis Size (mm) | Major Axis Size (mm) | ||||
|---|---|---|---|---|---|---|
| Measured Value | Actual Value | Error | Measured Value | Actual Value | Error | |
| 1 | 39.329 | 40.866 | 1.537 | 51.136 | 50.774 | 0.362 |
| 2 | 40.668 | 41.036 | 0.368 | 57.040 | 56.713 | 0.327 |
| 3 | 40.770 | 41.939 | 1.169 | 53.405 | 52.856 | 0.549 |
| 4 | 40.742 | 41.661 | 0.919 | 54.140 | 53.388 | 0.752 |
| 5 | 40.617 | 41.828 | 1.211 | 53.291 | 52.478 | 0.813 |
| 6 | 42.825 | 42.902 | 0.077 | 54.966 | 54.033 | 0.933 |
| 7 | 40.445 | 41.302 | 0.857 | 55.053 | 54.321 | 0.732 |
| 8 | 41.599 | 42.373 | 0.774 | 54.111 | 53.712 | 0.400 |
| 9 | 41.746 | 42.147 | 0.401 | 57.377 | 57.132 | 0.245 |
| 10 | 42.517 | 43.253 | 0.736 | 56.433 | 56.407 | 0.026 |
| 11 | 42.046 | 43.360 | 1.314 | 56.237 | 56.376 | 0.139 |
| 12 | 40.270 | 41.115 | 0.845 | 55.663 | 55.566 | 0.097 |
| 13 | 41.385 | 42.198 | 0.813 | 53.052 | 52.312 | 0.740 |
| 14 | 41.119 | 42.011 | 0.892 | 54.079 | 54.024 | 0.055 |
| 15 | 42.264 | 42.862 | 0.598 | 54.105 | 53.613 | 0.492 |
| Regression Models | Significance Level | F-Value | |
|---|---|---|---|
| Major axis | 0.01 | 552.999 | P{F ≥ 98.503} = 0.01 |
| Minor axis | 72.320 | P{F ≥ 34.116} = 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Wang, Q.; Ma, M.; Zhu, Z.; Lin, W.; Liu, S.; Fan, W. Single-View Measurement Method for Egg Size Based on Small-Batch Images. Foods 2023, 12, 936. https://doi.org/10.3390/foods12050936
Liu C, Wang Q, Ma M, Zhu Z, Lin W, Liu S, Fan W. Single-View Measurement Method for Egg Size Based on Small-Batch Images. Foods. 2023; 12(5):936. https://doi.org/10.3390/foods12050936
Chicago/Turabian StyleLiu, Chengkang, Qiaohua Wang, Meihu Ma, Zhihui Zhu, Weiguo Lin, Shiwei Liu, and Wei Fan. 2023. "Single-View Measurement Method for Egg Size Based on Small-Batch Images" Foods 12, no. 5: 936. https://doi.org/10.3390/foods12050936