Absolute and Precise Terahertz-Wave Radar Based on an Amplitude-Modulated Resonant-Tunneling-Diode Oscillator


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Principle
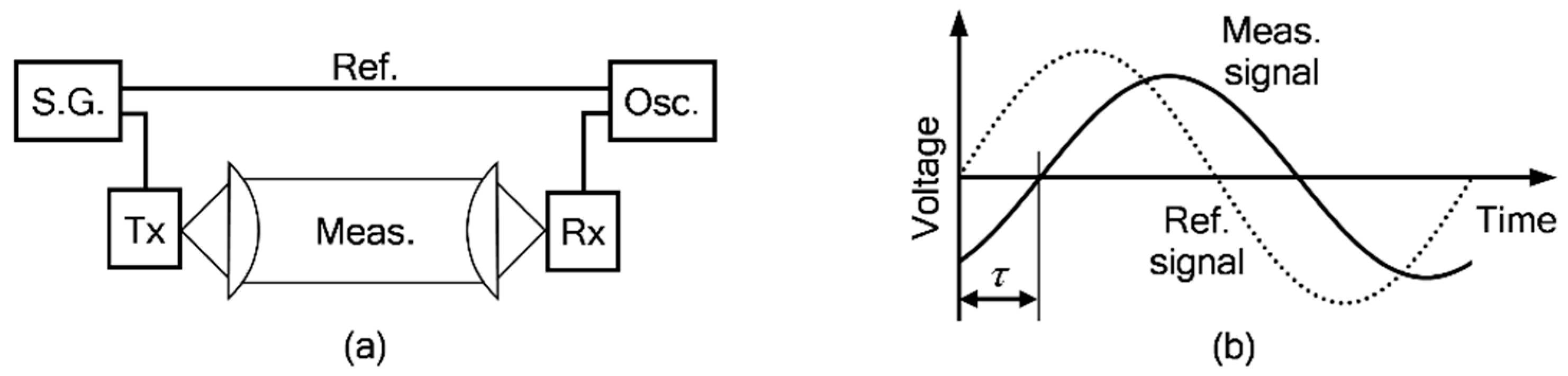
2.1. Step 1: Absolute Propagation Time Difference
2.2. Error Estimation for Step 1
2.3. Step 2: Improved Precision
3. Verification
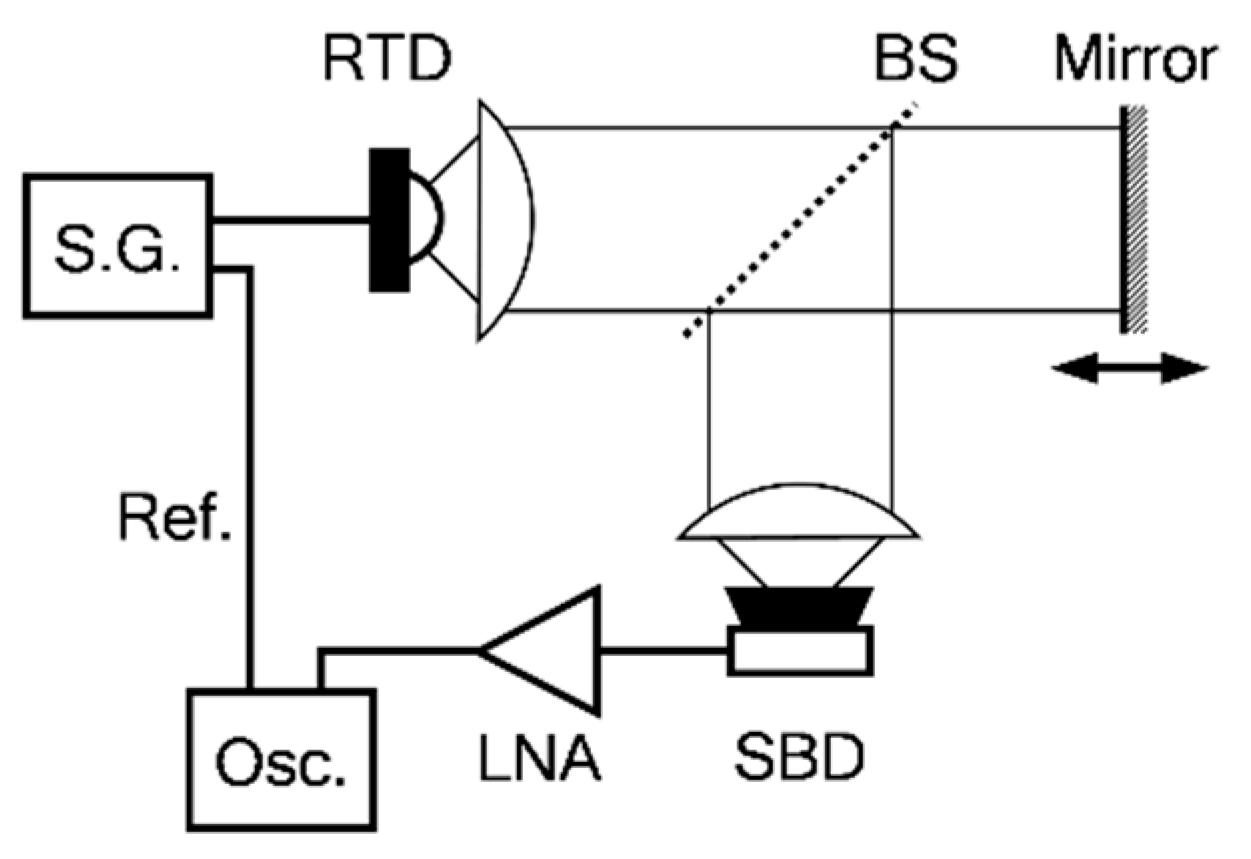
3.1. Experimental Setup
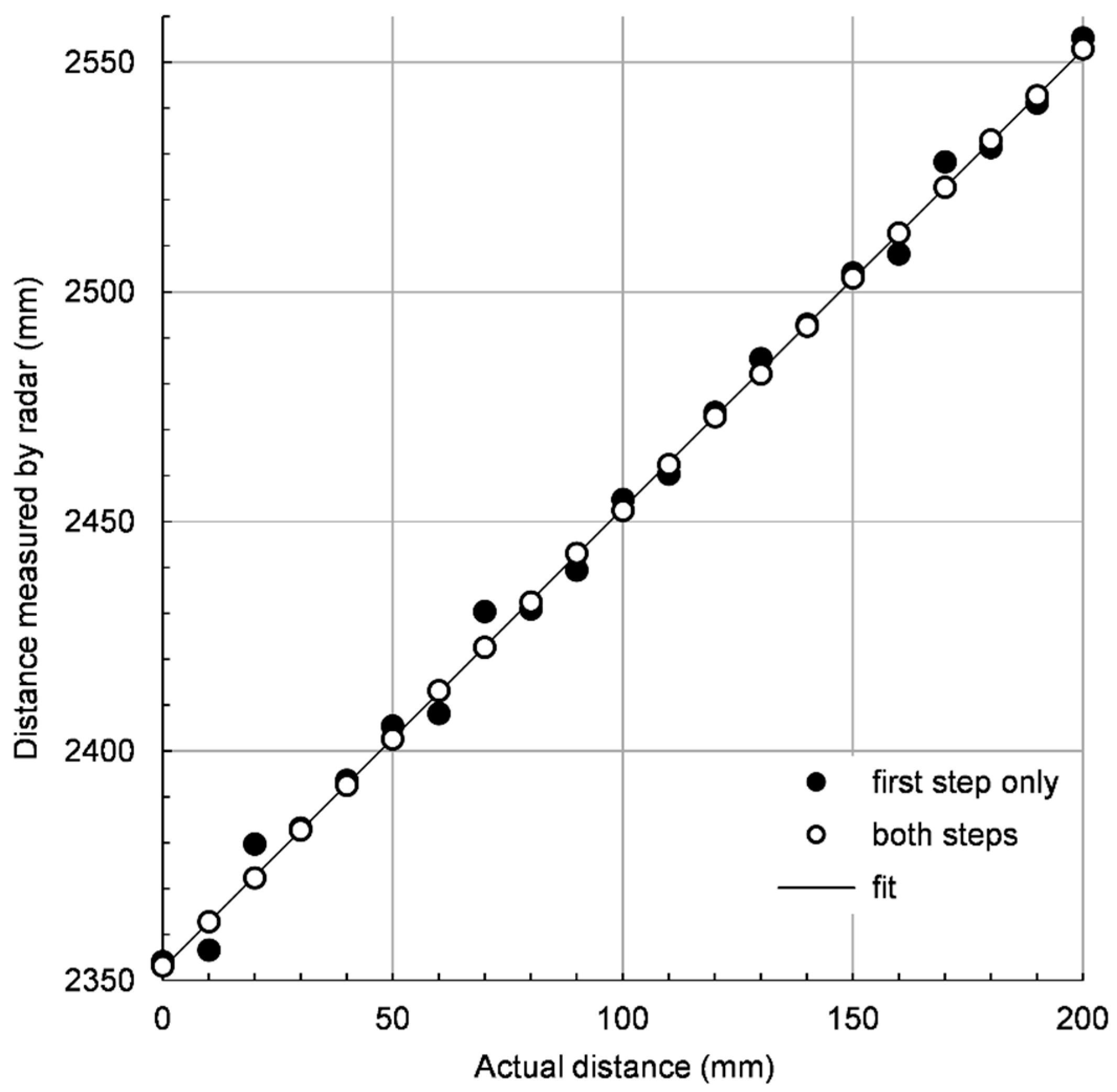
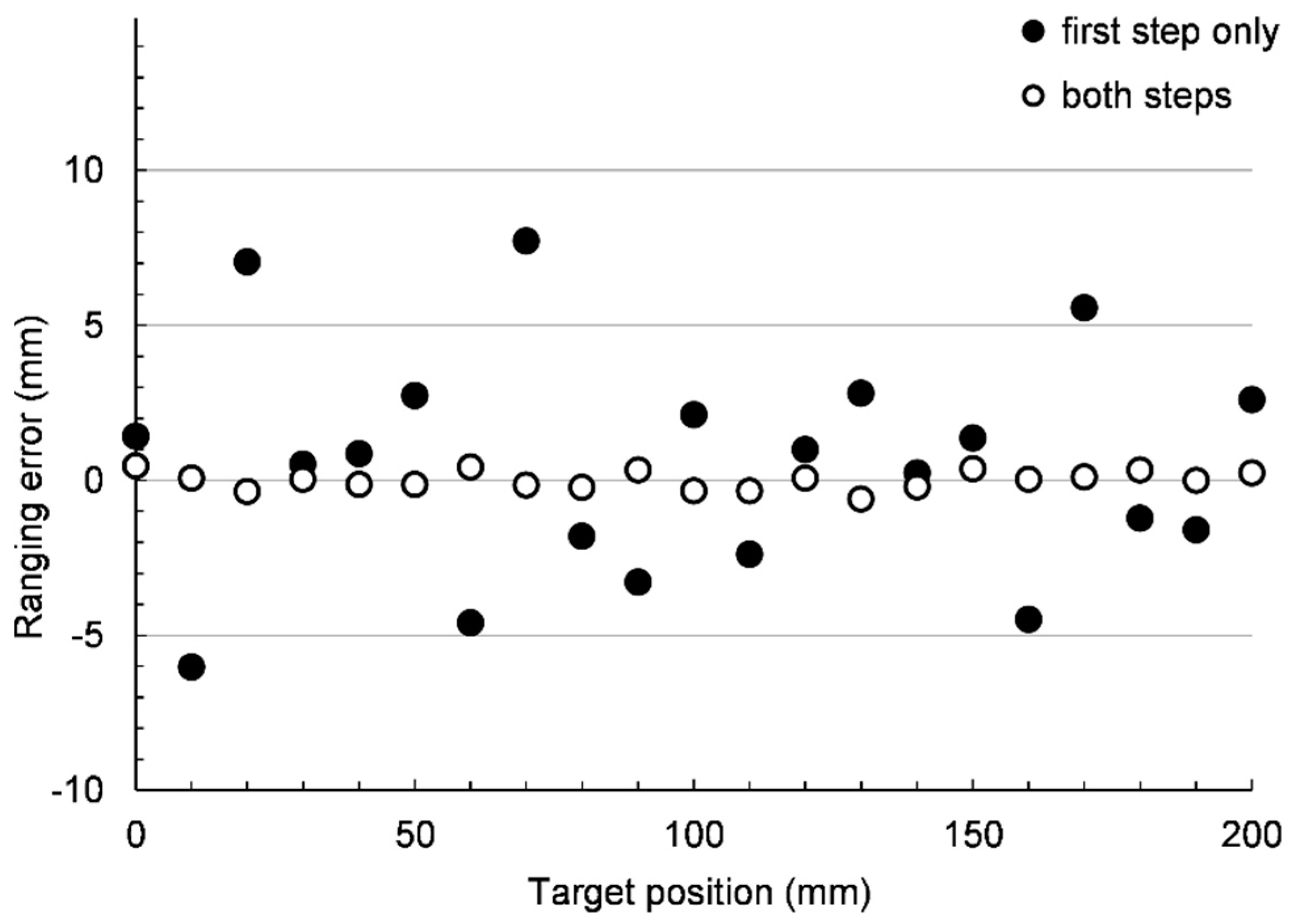
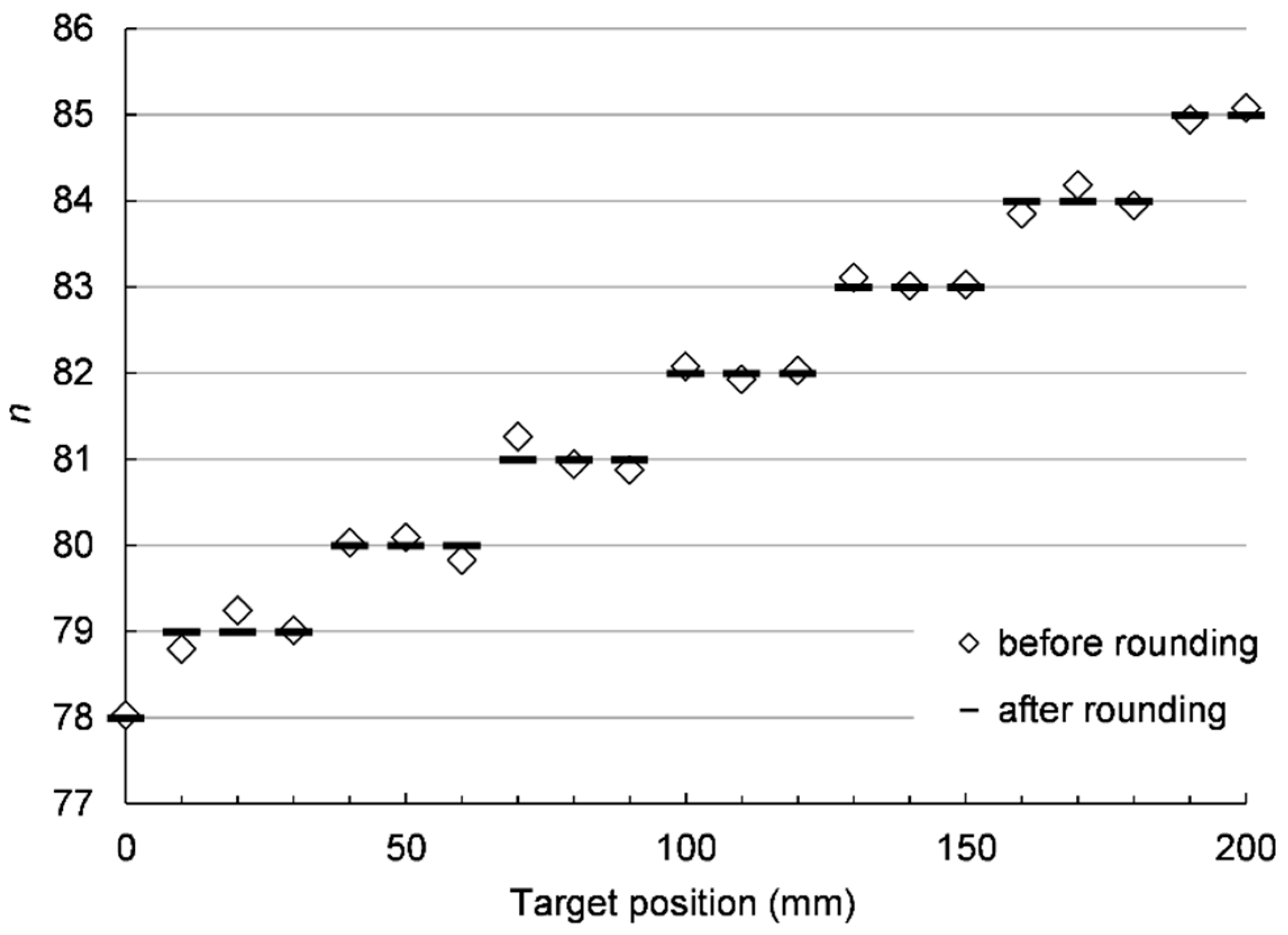
3.2. Measurement Results
3.3. Improvement Ideas
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dobroiu, A.; Otani, C.; Kawase, K. Terahertz-wave sources and imaging applications. Meas. Sci. Technol. 2006, 17, R161–R174. [Google Scholar] [CrossRef]
- Song, H.-J.; Nagatsuma, T. Handbook of Terahertz Technologies: Devices and Applications; Pan Stanford Publishing: Singapore, 2015; ISBN 978-981-4613-08-8. [Google Scholar]
- Asada, M.; Suzuki, S. Resonant tunneling diodes for terahertz sources. In Handbook of Terahertz Technologies: Devices and Applications; Song, H.-J., Nagatsuma, T., Eds.; Pan Stanford Publishing: Singapore, 2015; pp. 151–185. ISBN 978-981-4613-08-8. [Google Scholar]
- Suzuki, S.; Shiraishi, M.; Shibayama, H.; Asada, M. High-power operation of terahertz oscillators with resonant tunneling diodes using impedance-matched antennas and array configuration. IEEE J. Sel. Top. Quantum Electron. 2013, 19, 8500108. [Google Scholar] [CrossRef]
- Kasagi, K.; Suzuki, S.; Asada, M. Large-element array of resonant-tunneling-diode terahertz oscillator for high output power at 1 THz region. In Proceedings of the Compound Semiconductor Week (CSW2018), Cambridge, MA, USA, 29 May–1 June 2018. [Google Scholar]
- Nuss, M.C.; Orenstein, J. Terahertz time-domain spectroscopy. In Millimeter and Submillimeter Wave Spectroscopy of Solids; Grüner, G., Ed.; Springer: Berlin/Heidelberg, Germany, 1998; ISBN 978-3-662-30953-7. [Google Scholar]
- Cooper, K.B.; Dengler, R.J.; Llombart, N.; Thomas, B.; Chattopadhyay, G.; Siegel, P.S. THz imaging radar for standoff personnel screening. IEEE Trans. Terahertz Sci. Technol. 2011, 1, 169–182. [Google Scholar] [CrossRef]
- Caris, M.; Stanko, S.; Wahlen, A.; Sommer, R.; Wilcke, J.; Pohl, N.; Leuther, A.; Tessman, A. Very high resolution radar at 300 GHz. In Proceedings of the 44th European Microwave Conference, Rome, Italy, 6–9 October 2014; pp. 1797–1799. [Google Scholar]
- Jaeschke, T.; Bredendiek, C.; Pohl, N. A 240 GHz ultra-wideband FMCW radar system with on-chip antennas for high resolution radar imaging. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest, Seattle, WA, USA, 2–7 June 2013. [Google Scholar] [CrossRef]
- Wang, X.; Hou, L.; Zhang, Y. Continuous-wave terahertz interferometry with multiwavelength phase unwrapping. Appl. Opt. 2010, 49, 5095–5102. [Google Scholar] [CrossRef] [PubMed]
- Nilssen, O.K.; Boyer, W.D. Amplitude modulated CW radar. IRE Trans. Aerosp. Navig. Electron. 1962, 4, 250–254. [Google Scholar] [CrossRef]
- Hu, J.; Wakasugi, R.; Suzuki, S.; Asada, M. Amplitude-modulated continuous wave ranging system with resonant-tunneling-diode terahertz oscillator. In Proceedings of the 2018 43rd International Conference on Infrared, Millimeter, and Terahertz Waves (IRMMW-THz), Nagoya Aichi, Japan, 9–14 September 2018. [Google Scholar]
- Ikeda, Y.; Kitagawa, S.; Okada, K.; Suzuki, S.; Asada, M. Direct intensity modulation of resonant-tunneling-diode terahertz oscillator up to ~30 GHz. IEICE Electron. Express 2015, 12, 20141161. [Google Scholar] [CrossRef]
- Izumi, R.; Suzuki, S.; Asada, M. 1.98 THz resonant-tunneling-diode oscillator with reduced conduction loss by thick antenna electrode. In Proceedings of the 2017 42nd International Conference on Infrared, Millimeter, and Terahertz Waves (IRMMW-THz), Quintana Roo, Mexico, 27 August–1 September 2017. [Google Scholar]
- Asada, M.; Suzuki, S. Theoretical analysis of external feedback effect on oscillation characteristics of resonant-tunneling-diode terahertz oscillators. Jpn. J. Appl. Phys. 2015, 54, 070309. [Google Scholar] [CrossRef]
- Manh, L.D.; Diebold, S.; Nishio, K.; Nishida, Y.; Kim, J.; Mukai, T.; Fujita, M.; Nagatsuma, T. External feedback effect in terahertz resonant tunneling diode oscillators. IEEE Trans. Terahertz Sci. Technol. 2018, 8, 455–464. [Google Scholar] [CrossRef]







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dobroiu, A.; Wakasugi, R.; Shirakawa, Y.; Suzuki, S.; Asada, M. Absolute and Precise Terahertz-Wave Radar Based on an Amplitude-Modulated Resonant-Tunneling-Diode Oscillator. Photonics 2018, 5, 52. https://doi.org/10.3390/photonics5040052
Dobroiu A, Wakasugi R, Shirakawa Y, Suzuki S, Asada M. Absolute and Precise Terahertz-Wave Radar Based on an Amplitude-Modulated Resonant-Tunneling-Diode Oscillator. Photonics. 2018; 5(4):52. https://doi.org/10.3390/photonics5040052
Chicago/Turabian StyleDobroiu, Adrian, Ryotaka Wakasugi, Yusuke Shirakawa, Safumi Suzuki, and Masahiro Asada. 2018. "Absolute and Precise Terahertz-Wave Radar Based on an Amplitude-Modulated Resonant-Tunneling-Diode Oscillator" Photonics 5, no. 4: 52. https://doi.org/10.3390/photonics5040052