A Review on Image Sensor Communication and Its Applications to Vehicles


Abstract
:1. Introduction
2. Research Trend
2.1. Research Trend of VLC
2.2. Research Status of ISC
2.3. Image-Sensor-Communication-Based Intelligent Transportation System (ITS-ISC)
3. Basic Concept and Architecture of an ITS-ISC
3.1. Vehicle-to-Everything (V2X) Communications Using Image Sensors and LEDs
3.2. Optical Channel Characteristic and Modulation Schemes
3.3. Advantages and Limitations in Image Sensor Receivers
4. Isc Receivers
4.1. Rolling-Shutter Camera
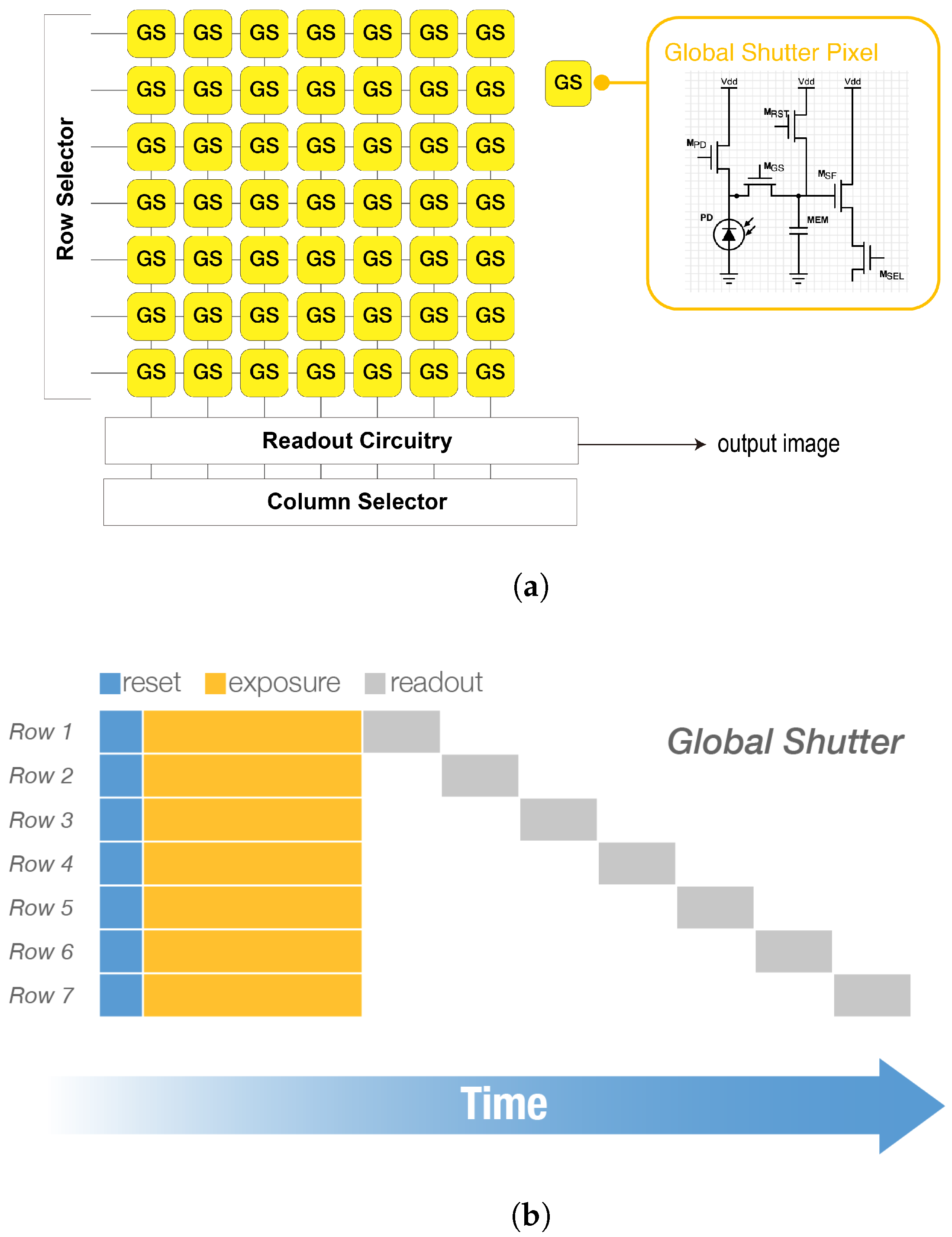
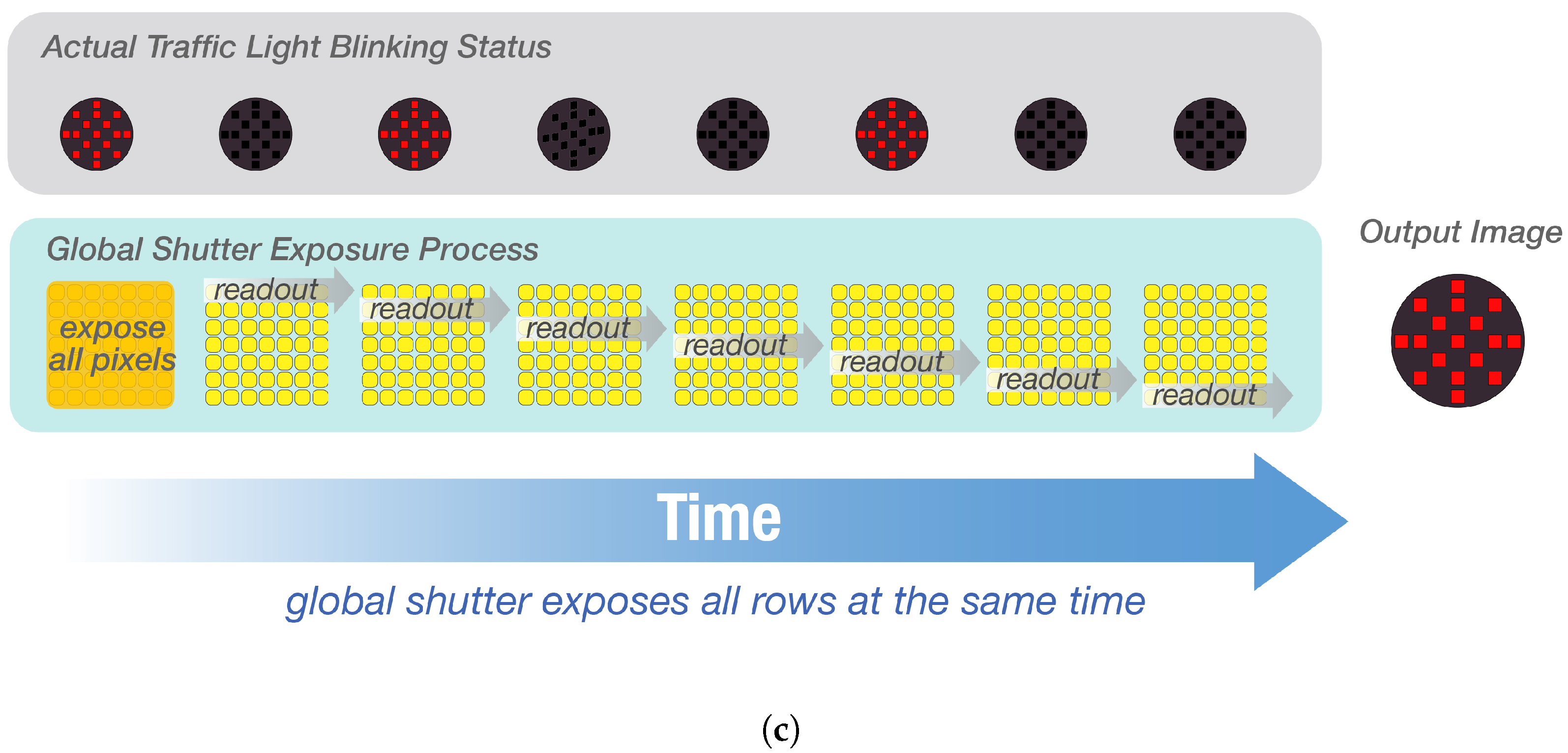
4.2. Global-Shutter High-Speed Camera
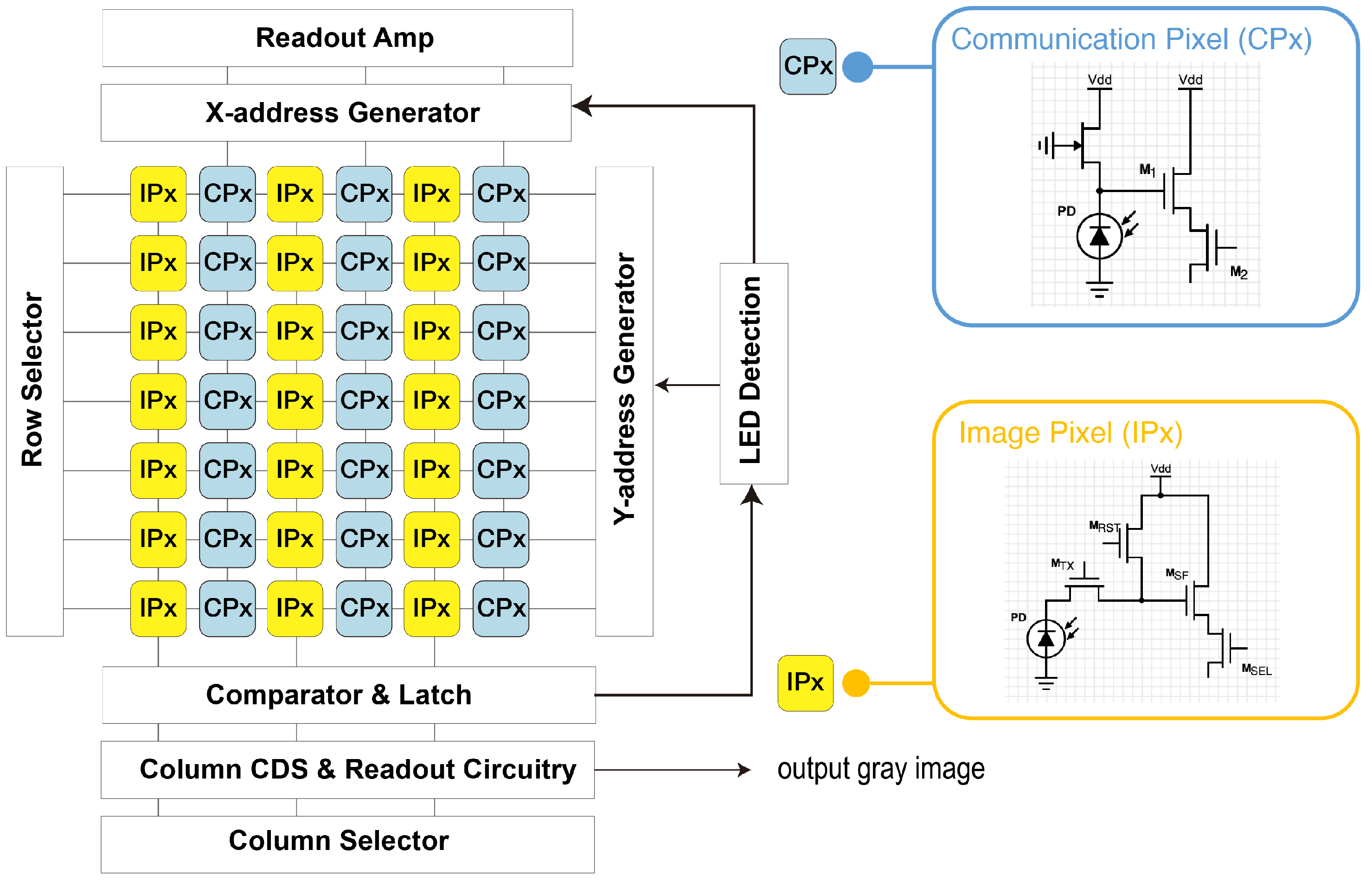
4.3. Optical Communication Image Sensor (OCI)
4.4. Event Camera (Dynamic Vision Sensor)
4.5. Summary of ISC Receivers
5. Range Estimation Using LEDs and Image Sensors
5.1. Stereo Vision-Based Range Estimation
5.2. Range Estimation Based on Monocular Vision
5.3. Range Estimation Using Machine Learning
5.4. Simultaneous Ranging and Communication
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 4T-APS | four-transistor active pixel sensor |
| BER | Bit-error-rate |
| CCD | Charge-coupled device |
| CMOS | Complementary metal–oxide–semiconductor |
| CPx | Communication pixel |
| DSRC | Dedicated short-range communication |
| ETC | Electronic toll collection |
| FD | floating diffusion |
| fps | frame per second |
| GPS | Global positioning system |
| I2V | Infrastructure to vehicle |
| ISC | Image sensor communication |
| IPx | Image pixel |
| ITS | Intelligent transportation system |
| LED | Light-emitting diode |
| LiFi | Light fidelity |
| LiDAR | Light detection and ranging |
| LOS | Line-of-sight |
| MEM | memory |
| NLOS | Non-line-of-sight |
| OCC | Optical camera communication |
| OCI | Optical communication image sensor |
| OFDM | Orthogonal frequency division multiplexing |
| OOK | On-off keying |
| PD | Photodiode |
| POC | Phase-only correlation |
| S2-PSK | spatial-2 phase shift keying |
| V2V | Vehicle to vehicle |
| V2I | Vehicle to infrastructure |
| V2X | Vehicle to everything |
| VLC | Visible light communication |
References
- Pathak, P.; Feng, X.; Hu, P.; Mohapatra, P. Visible Light Communication, Networking, and Sensing: A Survey, Potential and Challenges. IEEE Commun. Surv. Tutor. 2015, 17, 2047–2077. [Google Scholar] [CrossRef]
- Jovicic, A.; Li, J.; Richardson, T. Visible light communication: Opportunities, challenges and the path to market. IEEE Commun. Mag. 2013, 51, 26–32. [Google Scholar] [CrossRef]
- Karunatilaka, D.; Zafar, F.; Kalavally, V.; Parthiban, R. LED based indoor visible light communications: State of the art. IEEE Commun. Surv. Tutor. 2015, 17, 1649–1678. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Haas, H.; Yin, L.; Wang, Y.; Chen, C. What is LiFi? J. Light. Technol. 2016, 34, 1533–1544. [Google Scholar] [CrossRef]
- Bell, A.G. On the production and reproduction of sound by light. Am. J. Sci. 1880, s3-20, 305–324. [Google Scholar] [CrossRef]
- Vanderwater, D.; Tan, I.H.; Hofler, G.; Defevere, D.; Kish, F. High-brightness AlGaInP light emitting diodes. Proc. IEEE 1997, 85, 1752–1764. [Google Scholar] [CrossRef]
- Tanaka, Y.; Haruyama, S.; Nakagawa, M. Wireless optical transmissions with white colored LED for wireless home links. In Proceedings of the 11th IEEE International Symposium on Personal Indoor and Mobile Radio Communications, PIMRC 2000. Proceedings (Cat. No. 00TH8525), London, UK, 18–21 September 2000; Volume 2, pp. 1325–1329. [Google Scholar] [CrossRef]
- Pang, G.; Kwan, T.; Chan, C.H.; Liu, H. LED traffic light as a communications device. In Proceedings of the 199 IEEE/IEEJ/JSAI International Conference on Intelligent Transportation Systems (Cat. No. 99TH8383), Tokyo, Japan, 5–8 October 1999; pp. 788–793. [Google Scholar] [CrossRef]
- Pang, G.K.H.; Liu, H.H.S. LED location beacon system based on processing of digital images. IEEE Trans. Intell. Transp. Syst. 2001, 2, 135–150. [Google Scholar] [CrossRef]
- Haruyama, S.; Yamazato, T. Image sensor based visible light communication. In Visible Light Communication; Cambridge University Press: Cambridge, UK, 2015; pp. 181–205. [Google Scholar] [CrossRef]
- Kamakura, K. Image Sensors Meet LEDs. IEICE Trans. Commun. 2017, E100.B, 917–925. [Google Scholar] [CrossRef]
- Nguyen, T.; Islam, A.; Yamazato, T.; Jang, Y.M. Technical Issues on IEEE 802.15.7m Image Sensor Communication Standardization. IEEE Commun. Mag. 2018, 56, 213–218. [Google Scholar] [CrossRef]
- Nguyen, T.; Islam, A.; Hossan, T.; Jang, Y.M. Current Status and Performance Analysis of Optical Camera Communication Technologies for 5G Networks. IEEE Access 2017, 5, 4574–4594. [Google Scholar] [CrossRef]
- Hasan, M.K.; Ali, M.O.; Rahman, M.H.; Chowdhury, M.Z.; Jang, Y.M. Optical Camera Communication in Vehicular Applications: A Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6260–6281. [Google Scholar] [CrossRef]
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Lei, A.; Cruickshank, H.; Cao, Y.; Asuquo, P.; Ogah, C.P.A.; Sun, Z. Blockchain-Based Dynamic Key Management for Heterogeneous Intelligent Transportation Systems. IEEE Internet Things J. 2017, 4, 1832–1843. [Google Scholar] [CrossRef]
- ETSI TR 102 863 V1.1.1 (2011-06); Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Local Dynamic Map (LDM); Rationale for and Guidance on Standardization. European Telecommunications Standards Institute: Sophia Antipolis, France, 2011. Available online: https://www.etsi.org/deliver/etsi_tr/102800_102899/102863/01.01.01_60/tr_102863v010101p.pdf (accessed on 25 May 2023).
- Yamazato, T.; Takai, I.; Okada, H.; Fujii, T.; Yendo, T.; Arai, S.; Andoh, M.; Harada, T.; Yasutomi, K.; Kagawa, K.; et al. Image-sensor-based visible light communication for automotive applications. IEEE Commun. Mag. 2014, 52, 88–97. [Google Scholar] [CrossRef]
- Danakis, C.; Afgani, M.; Povey, G.; Underwood, I.; Haas, H. Using a CMOS camera sensor for visible light communication. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1244–1248. [Google Scholar] [CrossRef]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Bian, R.; Tavakkolnia, I.; Haas, H. 15.73 Gb/s Visible Light Communication With Off-the-Shelf LEDs. J. Light. Technol. 2019, 37, 2418–2424. [Google Scholar] [CrossRef]
- Tsonev, D.; Videv, S.; Haas, H. Towards a 100 Gb/s visible light wireless access network. Opt. Express 2015, 23, 1627–1637. [Google Scholar] [CrossRef]
- Yang, S.H.; Kim, H.S.; Son, Y.H.; Han, S.K. Three-Dimensional Visible Light Indoor Localization Using AOA and RSS With Multiple Optical Receivers. J. Light. Technol. 2014, 32, 2480–2485. [Google Scholar] [CrossRef]
- IEEE Std 802.15.7-2011; IEEE Standard for Local and Metropolitan Area Networks–Part 15.7: Short-Range Wireless Optical Communication Using Visible Light. IEEE: Piscataway, NJ, USA, 2011; pp. 1–309. [CrossRef]
- IEEE Std 802.15.7-2018 (Revision of IEEE Std 802.15.7-2011); IEEE Standard for Local and metropolitan area networks–Part 15.7: Short-Range Optical Wireless Communications. IEEE: Piscataway, NJ, USA, 2019. [CrossRef]
- ISO 14296:2016; Intelligent Transport Systems—Extension of Map Database Specifications for Applications of Cooperative ITS. ISO: Geneva, Switzerland, 2016. Available online: https://www.iso.org/standard/54587.html (accessed on 25 May 2023).
- ISO 22738:2020; Intelligent Transport Systems—Localized Communications— Optical Camera Communication. ISO: Geneva, Switzerland, 2020. Available online: https://www.iso.org/standard/73769.html (accessed on 25 May 2023).
- Yamazato, T.; Ohmura, A.; Okada, H.; Fujii, T.; Yendo, T.; Arai, S.; Kamakura, K. Range estimation scheme for integrated I2V-VLC using a high-speed image sensor. In Proceedings of the 2016 IEEE International Conference on Communications Workshops (ICC), Kuala Lumpur, Malaysia, 23–27 May 2016; pp. 326–330. [Google Scholar] [CrossRef]
- Yamazato, T.; Kinoshita, M.; Arai, S.; Souke, E.; Yendo, T.; Fujii, T.; Kamakura, K.; Okada, H. Vehicle Motion and Pixel Illumination Modeling for Image Sensor Based Visible Light Communication. IEEE J. Sel. Areas Commun. 2015, 33, 1793–1805. [Google Scholar] [CrossRef]
- Kinoshita, M.; Yamazato, T.; Okada, H.; Fujii, T.; Arai, S.; Yendo, T.; Kamakura, K. Motion modeling of mobile transmitter for image sensor based I2V-VLC, V2I-VLC, and V2V-VLC. In Proceedings of the Globecom Workshops (GC Wkshps), Austin, TX, USA, 8–12 December 2014; pp. 450–455. [Google Scholar] [CrossRef]
- Griffiths, A.D.; Herrnsdorf, J.; Strain, M.J.; Dawson, M.D. Scalable visible light communications with a micro-LED array projector and high-speed smartphone camera. Opt. Express 2019, 27, 15585–15594. [Google Scholar] [CrossRef] [PubMed]
- Chavez-Burbano, P.; Vitek, S.; Teli, S.; Guerra, V.; Rabadan, J.; Perez-Jimenez, R.; Zvanovec, S. Optical camera communication system for Internet of Things based on organic light emitting diodes. Electron. Lett. 2019, 55, 334–336. [Google Scholar] [CrossRef]
- Arisue, T.; Yamazato, T.; Okada, H.; Fujii, T.; Kinoshita, M.; Kamakura, K.; Arai, S.; Yendo, T. BER Measurement for Transmission Pattern Design of ITS Image Sensor Communication Using DMD Projector. In Proceedings of the 2020 IEEE 17th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Ahmed, F.; Conde, M.H.; Martinez, P.L.; Kerstein, T.; Buxbaum, B. Pseudo-Passive Time-of-Flight Imaging: Simultaneous Illumination, Communication, and 3D Sensing. IEEE Sens. J. 2022, 22, 21218–21231. [Google Scholar] [CrossRef]
- Zhong, S.; Zhu, Y.; Chi, X.; Shi, H.; Sun, H.; Wang, S. Optical Lensless-Camera Communications Aided by Neural Network. Appl. Sci. 2019, 9, 3238. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Grand View Research. Smart Transportation Market Size, Share & Trends Analysis Report By Solution (Ticketing Management System, Parking Management System, Integrated Supervision System), by Service, by Region, and Segment Forecasts, 2023–2030. 2023. Available online: https://www.grandviewresearch.com/industry-analysis/smart-transportation-market (accessed on 25 May 2023).
- Hu, J.W.; Zheng, B.Y.; Wang, C.; Zhao, C.H.; Hou, X.L.; Pan, Q.; Xu, Z. A survey on multi-sensor fusion based obstacle detection for intelligent ground vehicles in off-road environments. Front. Inf. Technol. Electron. Eng. 2020, 21, 675–692. [Google Scholar] [CrossRef]
- Hassan, N.B.; Ghassemlooy, Z.; Zvánovec, S.; Biagi, M.; Vegni, A.M.; Zhang, M.; Huang, Y. Interference cancellation in MIMO NLOS optical-camera-communication-based intelligent transport systems. Appl. Opt. 2019, 58, 9384–9391. [Google Scholar] [CrossRef]
- Kahn, J.; Barry, J. Wireless infrared communications. Proc. IEEE 1997, 85, 265–298. [Google Scholar] [CrossRef]
- Nagura, T.; Yamazato, T.; Katayama, M.; Yendo, T.; Fujii, T.; Okada, H. Improved Decoding Methods of Visible Light Communication System for ITS Using LED Array and High-Speed Camera. In Proceedings of the 2010 IEEE 71st Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Arai, S.; Shiraki, Y.; Yamazato, T.; Okada, H.; Fujii, T.; Yendo, T. Multiple LED arrays acquisition for image-sensor-based I2V-VLC using block matching. In Proceedings of the 2014 IEEE 11th Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2014; pp. 605–610. [Google Scholar] [CrossRef]
- Tram, V.T.B.; Yoo, M. Vehicle-to-Vehicle Distance Estimation Using a Low-Resolution Camera Based on Visible Light Communications. IEEE Access 2018, 6, 4521–4527. [Google Scholar] [CrossRef]
- Ohta, J. Smart CMOS Image Sensors and Applications; CRC Press: Boca Raton, FL, USA, 2020; p. 157. [Google Scholar] [CrossRef]
- Apple. iPhone 14 Specifications. 2023. Available online: https://www.apple.com/iphone-14/specs/ (accessed on 25 May 2023).
- Kamegawa, S.; Kinoshita, M.; Yamazato, T.; Okada, H.; Fujii, T.; Kamakura, K.; Yendo, T.; Arai, S. Performance Evaluation of Precoded Pulse Width Modulation for Image Sensor Communication. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018. [Google Scholar]
- Huang, R.; Kinoshita, M.; Yamazato, T.; Okada, H.; Kamakura, K.; Arai, S.; Yendo, T.; Fujii, T. Performance Evaluation of Range Estimation for Image Sensor Communication Using Phase-only Correlation. In Proceedings of the 2020 IEEE Globecom Workshops (GC Wkshps), Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Chow, C.W.; Chen, C.Y.; Chen, S.H. Visible light communication using mobile-phone camera with data rate higher than frame rate. Opt. Express 2015, 23, 26080–26085. [Google Scholar] [CrossRef]
- Ziehn, J.R.; Roschani, M.; Ruf, M.; Bruestle, D.; Beyerer, J.; Helmer, M. Imaging vehicle-to-vehicle communication using visible light. Adv. Opt. Technol. 2020, 9, 339–348. [Google Scholar] [CrossRef]
- Nguyen, H.; Nguyen, V.L.; Tran, D.H.; Jang, Y.M. Rolling Shutter OFDM Scheme for Optical Camera Communication Considering Mobility Environment Based on Deep Learning. Appl. Sci. 2022, 12, 8269. [Google Scholar] [CrossRef]
- Liu, Y.; He, W. Signal Detection and Identification in an Optical Camera Communication System in Moving State. J. Phys. Conf. Ser. 2021, 1873, 012015. [Google Scholar] [CrossRef]
- Liu, Z.; Guan, W.; Wen, S. Improved Target Signal Source Tracking and Extraction Method Based on Outdoor Visible Light Communication Using an Improved Particle Filter Algorithm Based on Cam-Shift Algorithm. IEEE Photonics J. 2019, 11, 7907520. [Google Scholar] [CrossRef]
- Kamiya, S.; Tang, Z.; Yamazato, T. Visible Light Communication System Using Rolling Shutter Image Sensor for ITS. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022; pp. 640–645. [Google Scholar] [CrossRef]
- Islam, A.; Hossan, M.T.; Jang, Y.M. Convolutional neural networkscheme–based optical camera communication system for intelligent Internet of vehicles. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718770153. [Google Scholar] [CrossRef]
- Roberts, R. A MIMO protocol for camera communications (CamCom) using undersampled frequency shift ON-OFF keying (UFSOOK). In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1052–1057. [Google Scholar] [CrossRef]
- Halawi, S.; Yaacoub, E.; Kassir, S.; Dawy, Z. Performance Analysis of Circular Color Shift Keying in VLC Systems With Camera-Based Receivers. IEEE Trans. Commun. 2019, 67, 4252–4266. [Google Scholar] [CrossRef]
- Ji, P.; Tsai, H.M.; Wang, C.; Liu, F. Vehicular Visible Light Communications with LED Taillight and Rolling Shutter Camera. In Proceedings of the 2014 IEEE 79th Vehicular Technology Conference (VTC Spring), Seoul, Republic of Korea, 18–21 May 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Nguyen, T.; Islam, A.; Jang, Y.M. Region-of-Interest Signaling Vehicular System Using Optical Camera Communications. IEEE Photonics J. 2017, 9, 7900720. [Google Scholar] [CrossRef]
- Tsai, T.T.; Chow, C.W.; Chang, Y.H.; Jian, Y.H.; Liu, Y.; Yeh, C.H. 130-m Image sensor based Visible Light Communication (VLC) using under-sample modulation and spatial modulation. Opt. Commun. 2022, 519, 128405. [Google Scholar] [CrossRef]
- Takahashi, K.; Kamakura, K.; Kinoshita, M.; Yamazato, T. Nonlinear Transform for Parallel Transmission for Image-Sensor-based Visible Light Communication. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Kibe, S.; Kamakura, K.; Yamazato, T. Parallel Transmission Using M-Point DFT for Image-Sensor-Based Visible Light Communication. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Nagura, T.; Yamazato, T.; Katayama, M.; Yendo, T.; Fujii, T.; Okada, H. Tracking an LED array transmitter for visible light communications in the driving situation. In Proceedings of the 2010 7th International Symposium on Wireless Communication Systems (ISWCS), York, UK, 19–22 September 2010; pp. 765–769. [Google Scholar] [CrossRef]
- Usui, S.; Yamazato, T.; Arai, S.; Yendo, T.; Fujii, T.; Okada, H. Utilization of Spatio-temporal image for LED array acquisition in Road to Vehicle Visible Light Communication. In Proceedings of the 20th World Congress on Intelligent Transport Systems, Tokyo, Japan, 14–18 October 2013. [Google Scholar]
- Nakamura, K.; Huang, R.; Yamazato, T.; Kinoshita, M.; Kamakura, K.; Arai, S.; Yendo, T.; Fujii, T. Roadside LED array acquisition for road-to-vehicle visible light communication using spatial-temporal gradient values. IEICE Commun. Express 2022, 11, 462–467. [Google Scholar] [CrossRef]
- Arai, S.; Mase, S.; Yamazato, T.; Endo, T.; Fujii, T.; Tanimoto, M.; Kidono, K.; Kimura, Y.; Ninomiya, Y. Experimental on Hierarchical Transmission Scheme for Visible Light Communication using LED Traffic Light and High-Speed Camera. In Proceedings of the 2007 IEEE 66th Vehicular Technology Conference, Baltimore, MD, USA, 30 September–3 October 2007; pp. 2174–2178. [Google Scholar] [CrossRef]
- Nishimoto, S.; Nagura, T.; Yamazato, T.; Yendo, T.; Fujii, T.; Okada, H.; Arai, S. Overlay coding for road-to-vehicle visible light communication using LED array and high-speed camera. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC 2011), Washington, DC, USA, 5–7 October 2011; pp. 1704–1709. [Google Scholar] [CrossRef]
- Nishimoto, S.; Yamazato, T.; Okada, H.; Fujii, T.; Yendo, T.; Arai, S. High-speed transmission of overlay coding for road-to-vehicle visible light communication using LED array and high-speed camera. In Proceedings of the IEEE Globecom Workshops (OWC 2012), Anaheim, CA, USA, 3–7 December 2012; pp. 1234–1238. [Google Scholar] [CrossRef]
- Oike, Y.; Ikeda, M.; Asada, K. A smart image sensor with high-speed feeble ID-beacon detection for augmented reality system. In Proceedings of the ESSCIRC 2004—29th European Solid-State Circuits Conference (IEEE Cat. No. 03EX705), Estoril, Portugal, 16–18 September 2003; pp. 125–128. [Google Scholar] [CrossRef]
- Itoh, S.; Takai, I.; Sarker, M.; Hamai, M.; Yasutomi, K.; Andoh, M.; Kawahito, S. A CMOS image sensor for 10Mb/s 70m-range LED-based spatial optical communication. In Proceedings of the IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC’10), San Francisco, CA, USA, 7–11 February 2010; pp. 402–403. [Google Scholar] [CrossRef]
- Takai, I.; Ito, S.; Yasutomi, K.; Kagawa, K.; Andoh, M.; Kawahito, S. LED and CMOS Image Sensor Based Optical Wireless Communication System for Automotive Applications. IEEE Photonics J. 2013, 5, 6801418. [Google Scholar] [CrossRef]
- Takai, I.; Harada, T.; Andoh, M.; Yasutomi, K.; Kagawa, K.; Kawahito, S. Optical Vehicle-to-Vehicle Communication System Using LED Transmitter and Camera Receiver. IEEE Photonics J. 2014, 6, 7902513. [Google Scholar] [CrossRef]
- Goto, Y.; Takai, I.; Yamazato, T.; Okada, H.; Fujii, A.; Kawahito, S.; Arai, S.; Yendo, T.; Kamakura, K. BER characteristic of optical-OFDM using OCI. In Proceedings of the 2014 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Ishigaki, Japan, 17–20 November 2014; pp. 328–331. [Google Scholar] [CrossRef]
- Goto, Y.; Takai, I.; Yamazato, T.; Okada, H.; Fujii, T.; Kawahito, S.; Arai, S.; Yendo, T.; Kamakura, K. A New Automotive VLC System Using Optical Communication Image Sensor. IEEE Photonics J. 2016, 8, 6802716. [Google Scholar] [CrossRef]
- Gallego, G.; Delbrück, T.; Orchard, G.; Bartolozzi, C.; Taba, B.; Censi, A.; Leutenegger, S.; Davison, A.J.; Conradt, J.; Daniilidis, K.; et al. Event-Based Vision: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 154–180. [Google Scholar] [CrossRef]
- Shen, W.H.; Chen, P.W.; Tsai, H.M. Vehicular Visible Light Communication with Dynamic Vision Sensor: A Preliminary Study. In Proceedings of the 2018 IEEE Vehicular Networking Conference (VNC), Taipei, Taiwan, 5–7 December 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Chen, G.; Chen, W.; Yang, Q.; Xu, Z.; Yang, L.; Conradt, J.; Knoll, A. A Novel Visible Light Positioning System With Event-Based Neuromorphic Vision Sensor. IEEE Sensors J. 2020, 20, 10211–10219. [Google Scholar] [CrossRef]
- Tang, Z.; Yamazato, T.; Arai, S. A Preliminary Investigation For Event Camera-Based Visible Light Communication Using The Propeller-type Rotary LED Transmitter. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022; pp. 646–650. [Google Scholar] [CrossRef]
- Kaehler, A.; Bradski, G. Learning OpenCV 3: Computer Vision in C++ with the OpenCV Library, 1st ed.; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2016. [Google Scholar]
- Kinoshita, M.; Kamakura, K.; Yamazato, T.; Okada, H.; Fujii, T.; Arai, S.; Yendo, T. Stereo Ranging Method Using LED Transmitter for Visible Light Communication. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Ifthekhar, M.S.; Saha, N.; Jang, Y.M. Stereo-vision-based cooperative-vehicle positioning using OCC and neural networks. Opt. Commun. 2015, 352, 166–180. [Google Scholar] [CrossRef]
- Do, T.; Yoo, M. Visible light communication based vehicle positioning using LED street light and rolling shutter CMOS sensors. Opt. Commun. 2018, 407, 112–126. [Google Scholar] [CrossRef]
- Kim, B.W.; Jung, S.Y. Vehicle Positioning Scheme Using V2V and V2I Visible Light Communications. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Hossan, M.T.; Chowdhury, M.Z.; Hasan, M.K.; Shahjalal, M.; Nguyen, T.; Le, N.T.; Jang, Y.M. A New Vehicle Localization Scheme Based on Combined Optical Camera Communication and Photogrammetry. Mob. Inf. Syst. 2018, 2018, 8501898. [Google Scholar] [CrossRef]
- He, J.; Tang, K.; He, J.; Shi, J. Effective vehicle-to-vehicle positioning method using monocular camera based on VLC. Opt. Express 2020, 28, 4433–4443. [Google Scholar] [CrossRef]
- He, J.; Zhou, B. A Deep Learning-Assisted Visible Light Positioning Scheme for Vehicles With Image Sensor. IEEE Photonics J. 2022, 14, 1–7. [Google Scholar] [CrossRef]
- Huang, R.; Kinoshita, M.; Yamazato, T.; Okada, H.; Kamakura, K.; Arai, S.; Yendo, T.; Fujii, T. Simultaneous Visible Light Communication and Ranging Using High-Speed Stereo Cameras Based on Bicubic Interpolation Considering Multi-Level Pulse-Width Modulation (Advance Publication). IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2023, E106-A. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receiver Type | Reference | Data Rate | Communication Distance | Vehicle Speed |
|---|---|---|---|---|
| Rolling shutter | [55] | 600∼1000 bps | 5∼70 m | 15∼20 km/h |
| [61] | 720 bps | 100 m | N/A | |
| High-speed camera (global shutter) | [19] | 32 kbps | 30∼65 m | 30 km/h |
| [43] | 128 kbps | 10∼120 m | N/A | |
| [69] | 40 kbps | 20∼70 m | N/A | |
| Optical communication image sensor (OCI) | [19] | 10 Mbps | 20 m | 25 km/h |
| [72] | 20 Mbps | N/A | N/A | |
| [75] | 55 Mbps | 1.5 m | N/A | |
| Event camera | [77] | 16 kbps | 8 m | N/A |
| Ranging Method | Reference | Ranging Error | Communication Distance | Receiver | Vehicle Speed | Simultaneous Communication |
|---|---|---|---|---|---|---|
| Monocular Ranging | [30] | 0.3 m | 30∼60 m | high-speed camera | 30 km/h | No |
| [73] | N/A | around 8 m | OCI | 12.6∼14.0 km/h | Yes | |
| [84] | 1 m | 0∼60 m | N/A | N/A | No | |
| Stereo Ranging | [88] | 0.5 m | 20∼60 m | high-speed camera | N/A | Yes |
| [83] | 0.1∼1.5 m | 0∼100 m | rolling shutter camera | 0∼100 km/h | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, R.; Yamazato, T. A Review on Image Sensor Communication and Its Applications to Vehicles. Photonics 2023, 10, 617. https://doi.org/10.3390/photonics10060617
Huang R, Yamazato T. A Review on Image Sensor Communication and Its Applications to Vehicles. Photonics. 2023; 10(6):617. https://doi.org/10.3390/photonics10060617
Chicago/Turabian StyleHuang, Ruiyi, and Takaya Yamazato. 2023. "A Review on Image Sensor Communication and Its Applications to Vehicles" Photonics 10, no. 6: 617. https://doi.org/10.3390/photonics10060617