Estimation Method Based on Extended Kalman Filter for Uncertain Phase Shifts in Phase-Measuring Profilometry



Abstract
:1. Introduction
2. Principle
2.1. The Phase Estimation Model
2.2. Phase Shift Estimation Based on Extended Kalman Filter
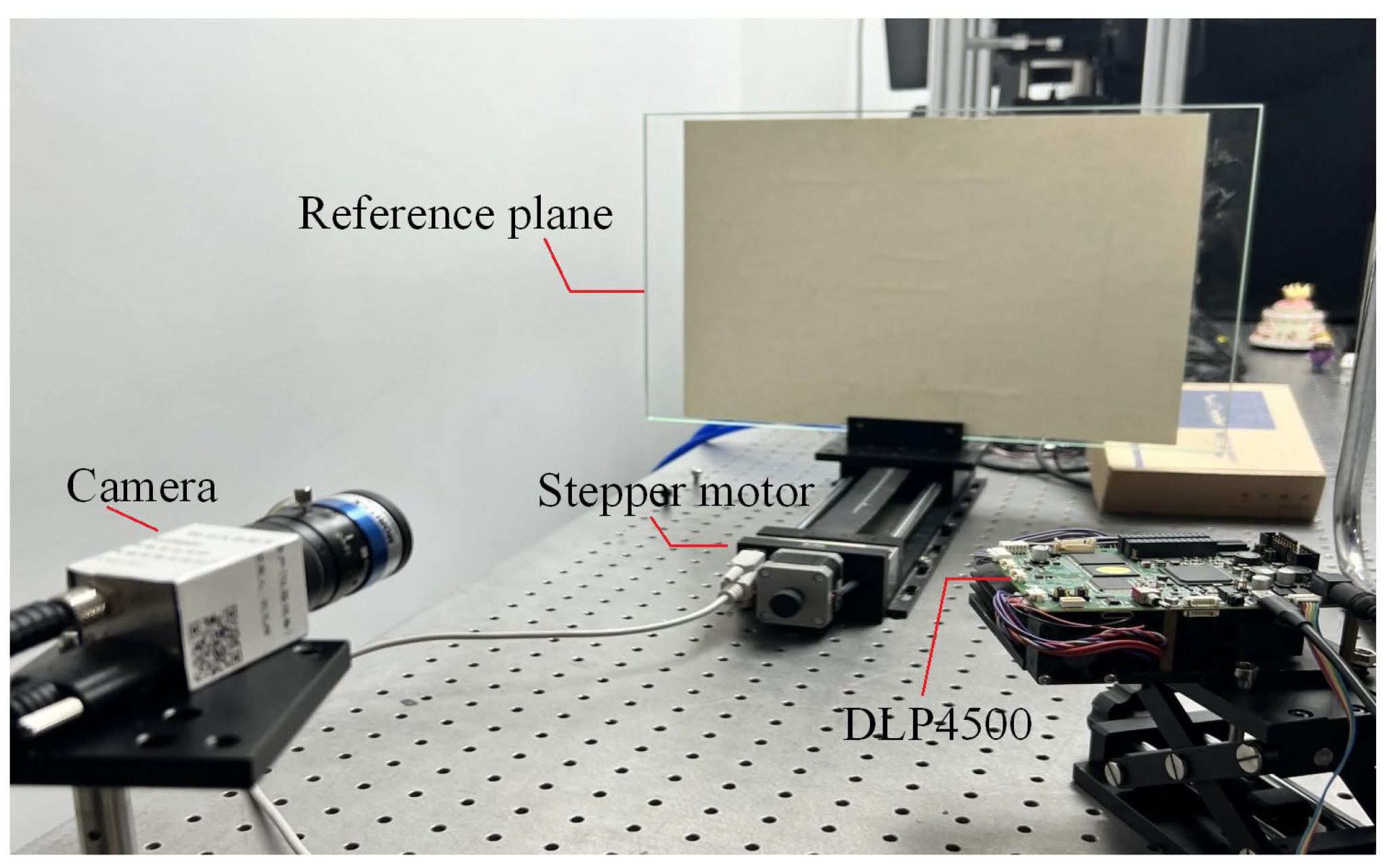
3. Experimental Results and Analysis
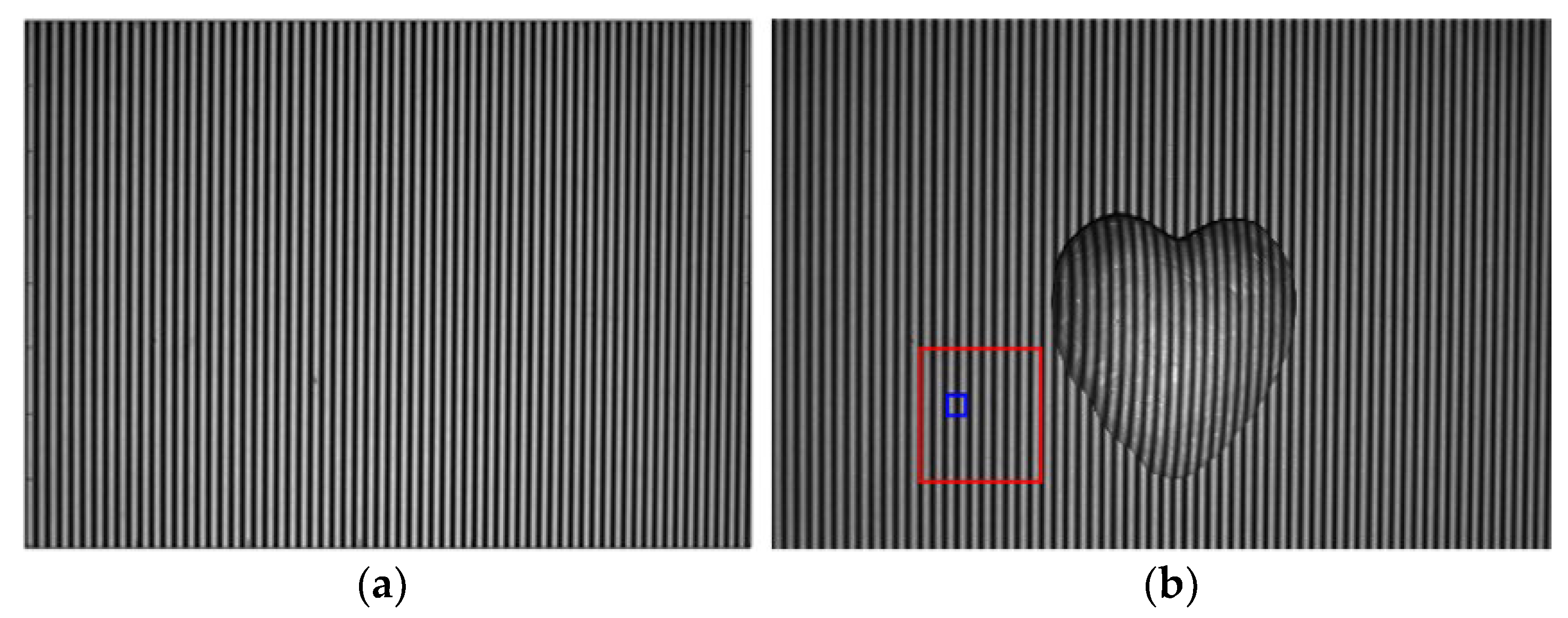
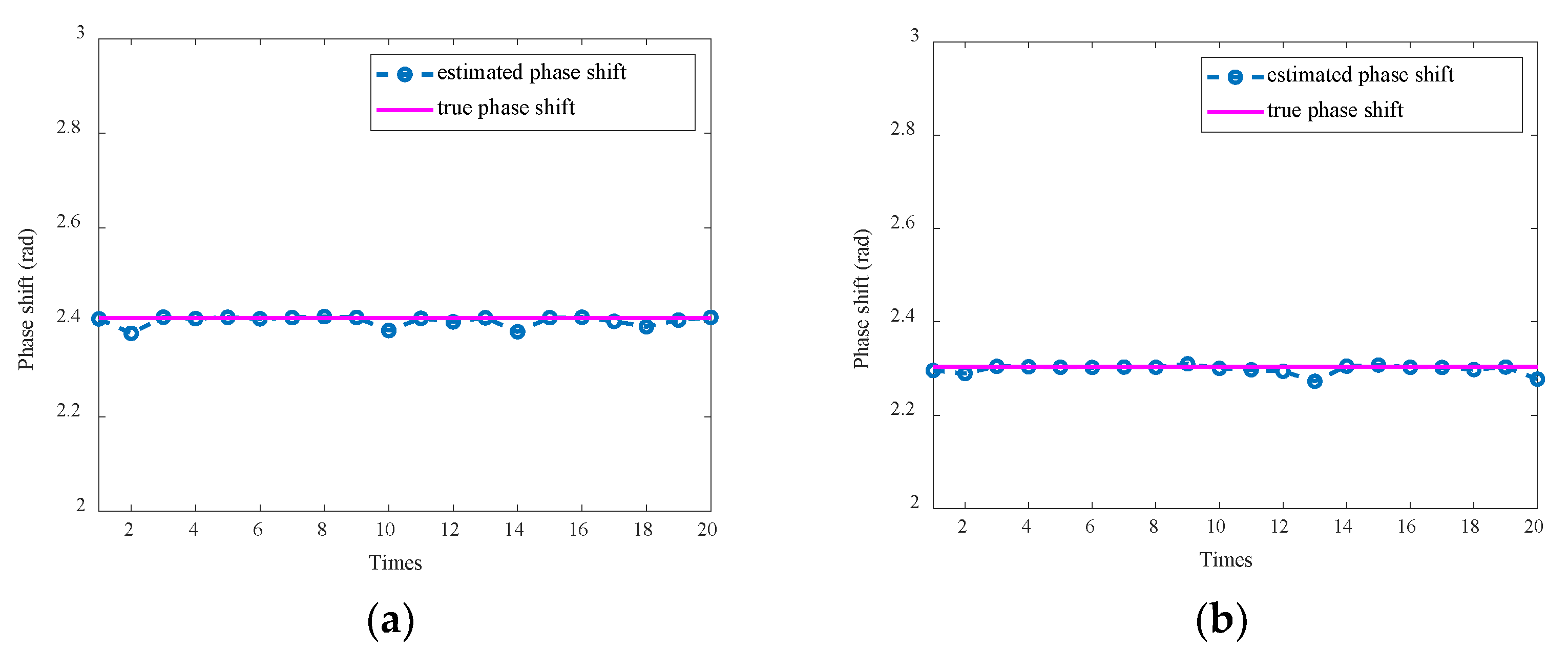
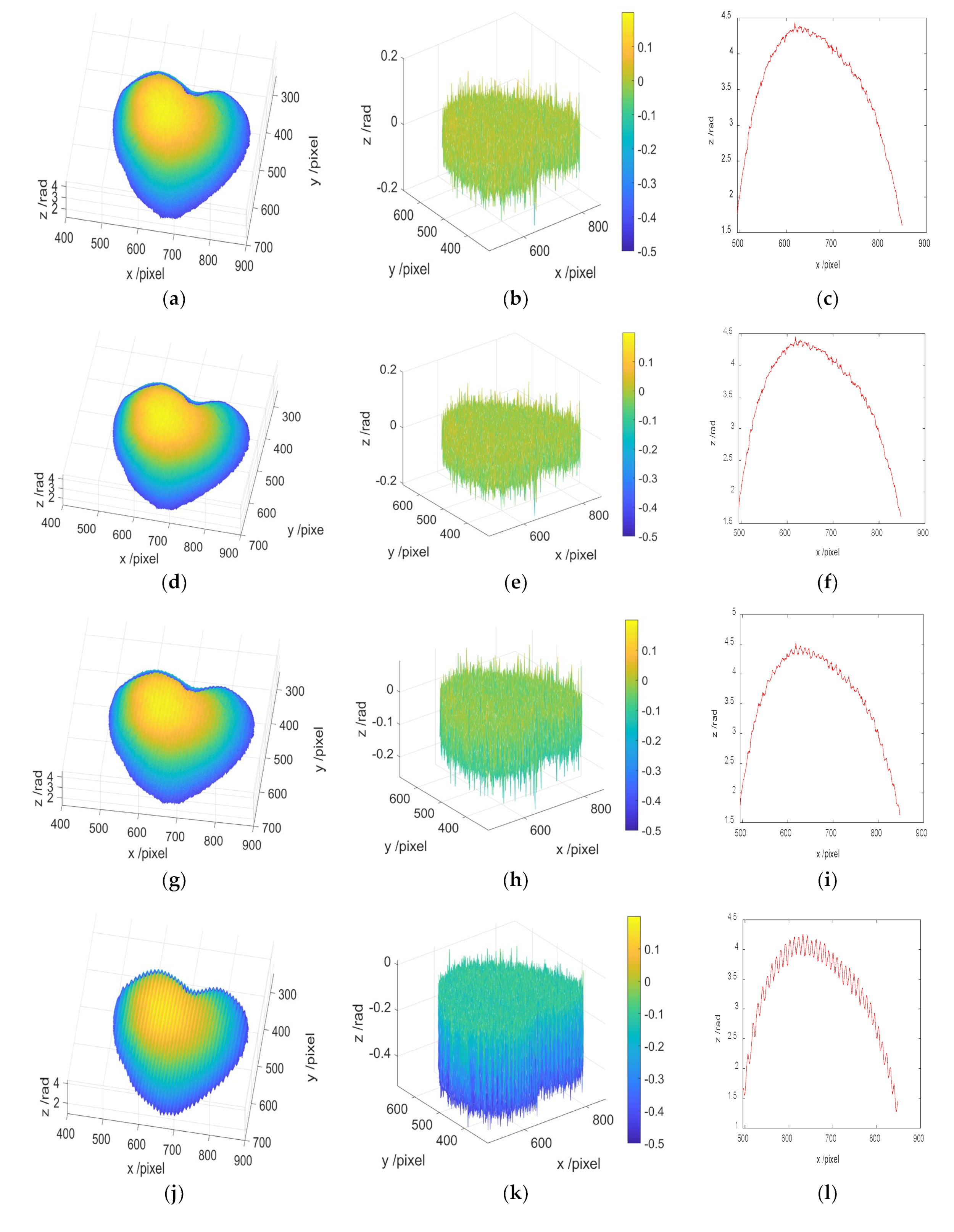
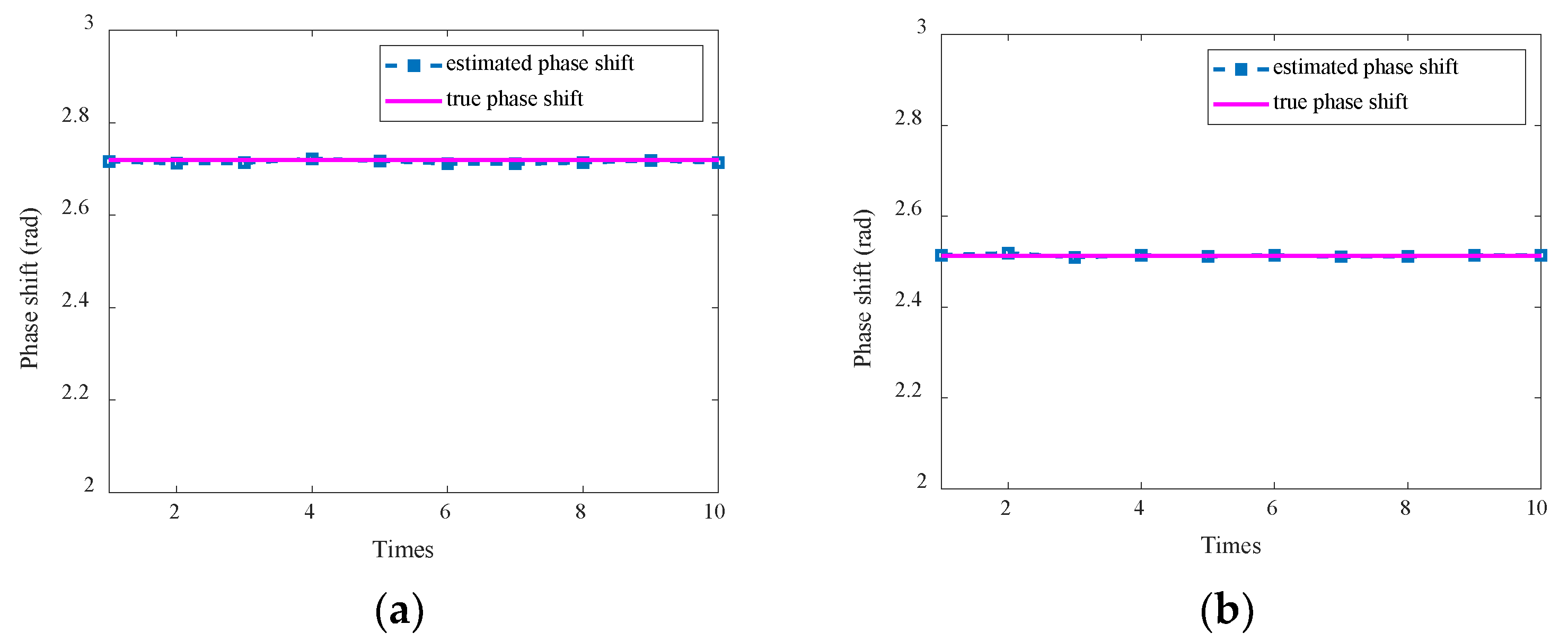
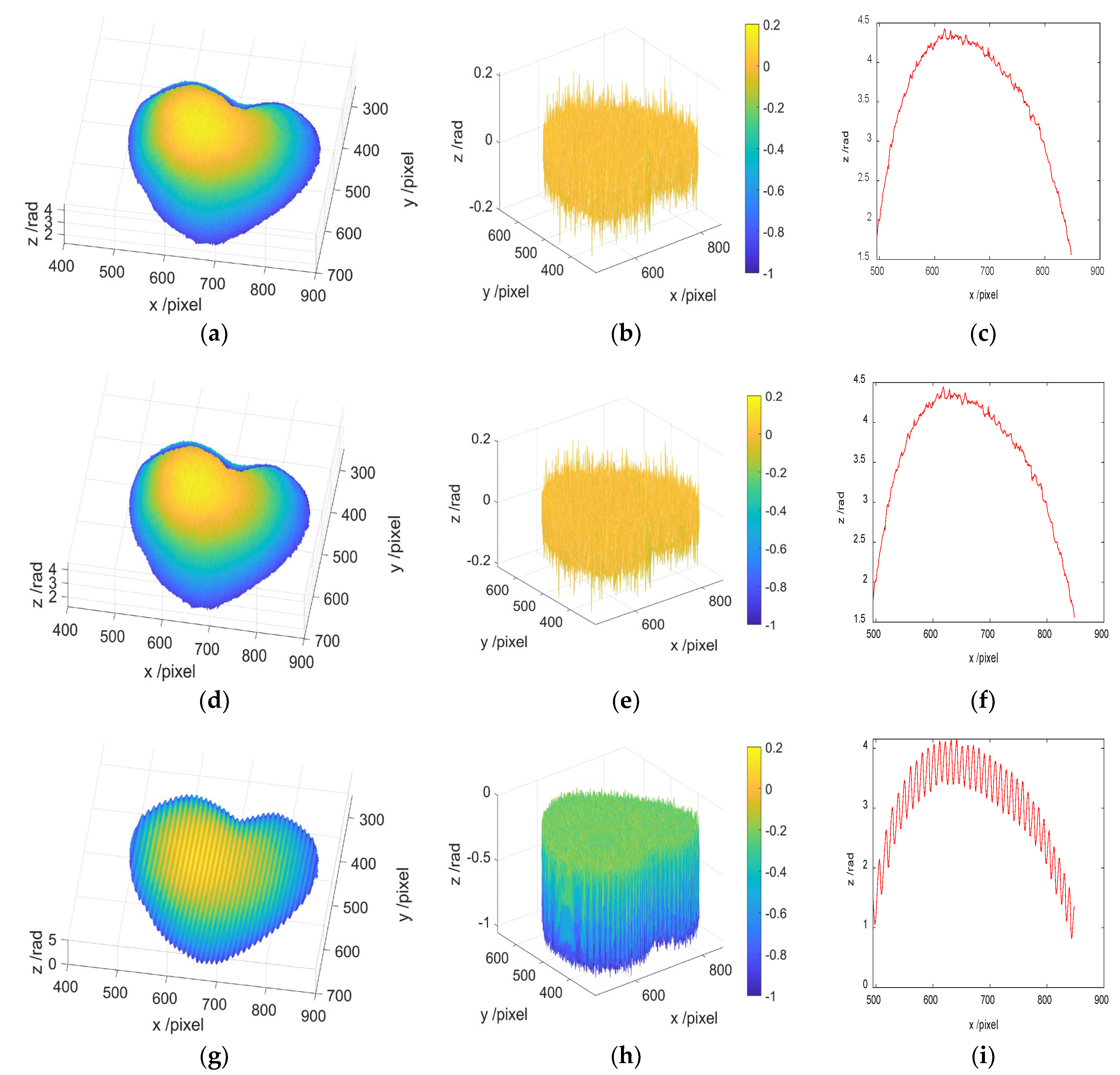
3.1. Experiment on Static Object with Preset Phase Shift Errors
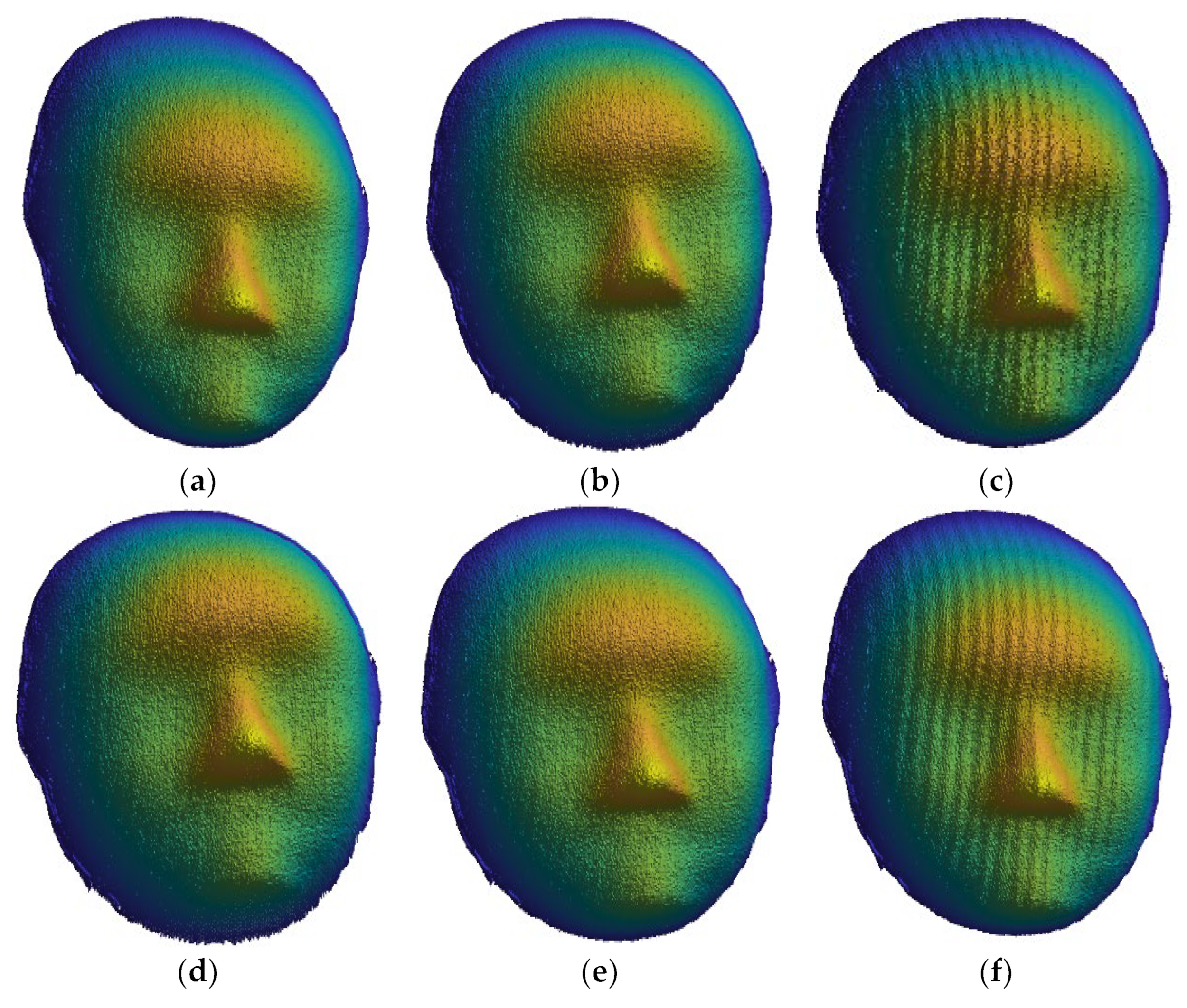
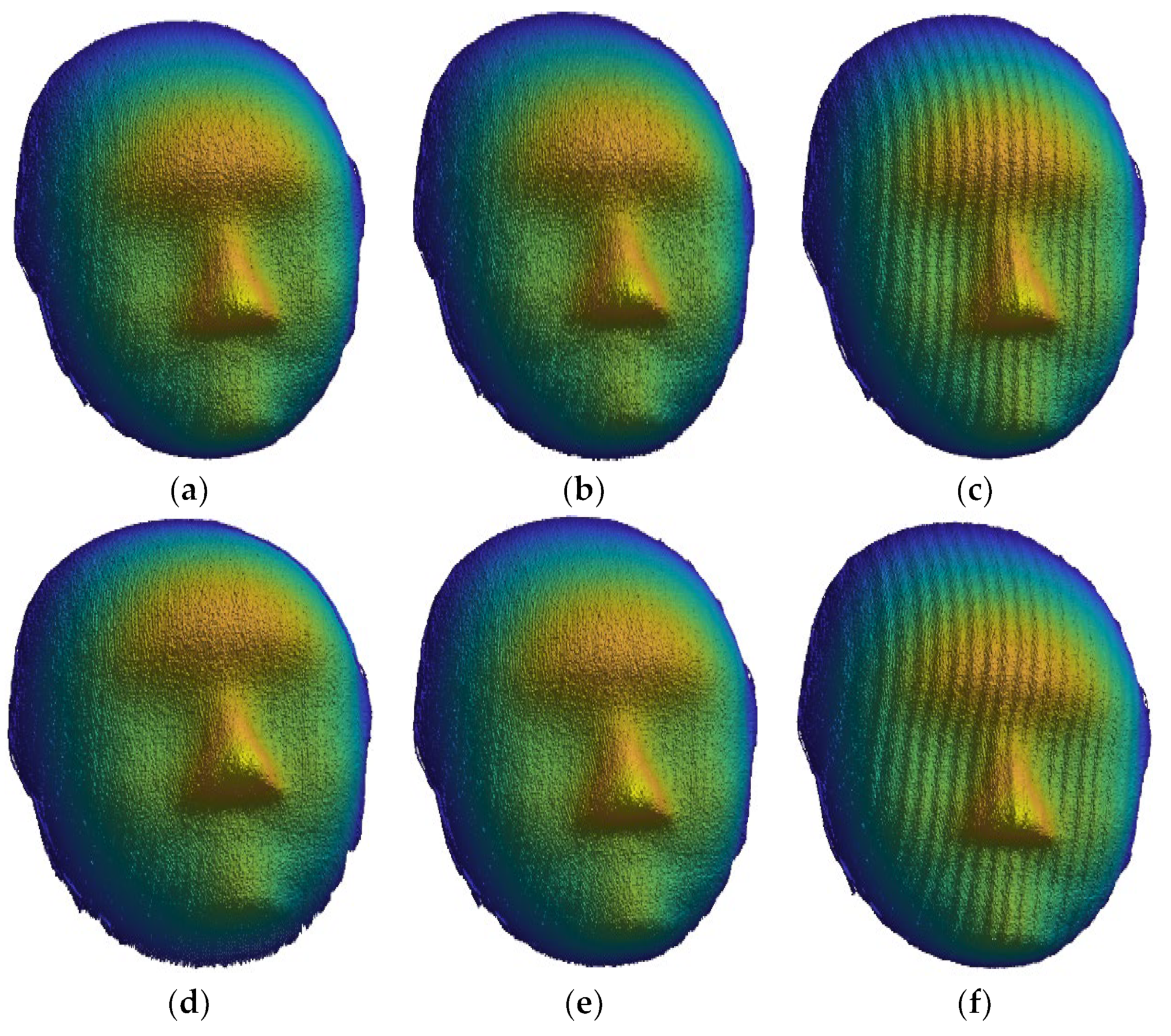
3.2. Experiment on Dynamic Scene with Uncertain Phase Shift Errors
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, F.; Brown, G.M.; Song, M.M. Overview of three-dimensional shape measurement using optical methods. Opt. Eng. 2000, 39, 10–22. [Google Scholar]
- Takeda, M.; Mutoh, K. Fourier-transform profilometry for the automatic-measurement of 3-d object shapes. Appl. Opt. 1983, 22, 3977–3982. [Google Scholar] [CrossRef]
- Zuo, C.; Feng, S.; Huang, L.; Tao, T.; Yin, W.; Chen, Q. Phase shifting algorithms for fringe projection profilometry: A review. Opt. Lasers Eng. 2018, 109, 23–59. [Google Scholar] [CrossRef]
- Kulkarni, R.; Rastogi, P. Single and Multicomponent Digital Optical Signal Analysis; Estimation of Phase and Its Derivatives; IOP Publishing: Bristol, UK, 2017. [Google Scholar]
- Zhang, S. High-speed 3D shape measurement with structured light methods: A review. Opt. Lasers Eng. 2018, 106, 119–131. [Google Scholar] [CrossRef]
- Cheng, Y.-Y.C.; Wyant, J.C. Two-wavelength phase shifting interferometry. Appl. Opt. 1984, 23, 4539–4543. [Google Scholar] [CrossRef]
- Lu, L.; Suresh, V.; Zheng, Y.; Wang, Y.; Xi, J.; Li, B. Motion induced error reduction methods for phase shifting profilometry: A review. Opt. Lasers Eng. 2021, 141, 106573. [Google Scholar] [CrossRef]
- Li, B.; Liu, Z.; Zhang, S. Motion-induced error reduction by combining Fourier transform profilometry with phase-shifting profilometry. Opt. Express 2016, 24, 23289–23303. [Google Scholar] [CrossRef]
- Lu, L.; Jia, Z.; Luan, Y.; Xi, J. Reconstruction of isolated moving objects with high 3D frame rate based on phase shifting profilometry. Opt. Commun. 2019, 438, 61–66. [Google Scholar] [CrossRef]
- Schwider, J. Phase shifting interferometry: Reference phase error reduction. Appl. Opt. 1989, 28, 3889–3892. [Google Scholar] [CrossRef]
- Hyun, J.-S.; Chiu, G.T.-C.; Zhang, S. High-speed and high-accuracy 3D surface using a mechanical projector. Opt. Express 2018, 26, 1474–1487. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Q.; Liu, Y.; Yu, X.; Hou, Y.; Chen, W. High-speed 3D shape measurement using a rotary mechanical projector. Opt. Express 2021, 29, 7885–7903. [Google Scholar] [CrossRef]
- Guo, Y.; Da, F.; Yu, Y. High-quality defocusing phase-shifting profilometry on dynamic objects. Opt. Eng. 2018, 57, 105105. [Google Scholar] [CrossRef]
- Wu, K.; Li, M.; Lu, L.; Xi, J. Reconstruction of Isolated Moving Objects by Motion-Induced Phase Shift Based on PSP. Appl. Sci. 2021, 12, 252. [Google Scholar] [CrossRef]
- Cong, P.; Xiong, Z.; Zhang, Y.; Zhao, S.; Wu, F. Accurate dynamic 3d sensing with fourier-assisted phase shifting. IEEE J. Select. Top Sig. Process. 2014, 9, 396–408. [Google Scholar] [CrossRef]
- Guo, W.; Wu, Z.; Li, Y.; Liu, Y.; Zhang, Q. Real-time 3D shape measurement with dual-frequency composite grating and motion-induced error reduction. Opt. Express 2020, 28, 26882–26897. [Google Scholar] [CrossRef]
- Wang, Z.; Han, B. Advanced iterative algorithm for phase extraction of randomly phase-shifted interferograms. Opt. Lett. 2004, 29, 1671–1673. [Google Scholar] [CrossRef]
- Lu, L.; Jiangtao, X.; Yanguang, Y.; Qinghua, G. Improving the accuracy performance of phase-shifting profilometry. Opt. Express 2020, 28, 26882–26897. [Google Scholar]
- Guo, W.; Wu, Z.; Zhang, Q.; Wang, Y. Real-time motion-induced error compensation for 4-step phase-shifting profilometry. Opt. Express 2021, 29, 23822–23834. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Jiang, C.; Zhang, S. Motion induced phase error reduction using a Hilbert transform. Opt. Express 2018, 26, 34224–34235. [Google Scholar] [CrossRef]
- Feng, S.; Zuo, C.; Tao, T.; Hu, Y.; Zhang, M.; Chen, Q.; Gu, G. Robust dynamic 3-D measurements with motion-compensated phase-shifting profilometry. Opt. Lasers Eng. 2018, 103, 127–138. [Google Scholar] [CrossRef]
- Su, W.; Tan, J.; He, Z. A Deep Learning-Based Approach for Motion-Induced Error Reduction in Fringe Projection Profilometry. In Proceedings of the SPIE, Eighth Symposium on Novel Photoelectronic Detection Technology and Applications, Kunming, China, 7–9 December 2021; Volume 12169. [Google Scholar]
- Yu, H.; Chen, X.; Zhang, Z.; Zuo, C.; Zhang, Y.; Zheng, D.; Han, J. Dynamic 3-D measurement based on fringe-to-fringe transformation using deep learning. Opt. Express 2020, 28, 9405–9418. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Guo, W.; Shen, J.; Wu, Z.; Zhang, Q. Motion-Induced Phase Error Compensation Using Three-Stream Neural Networks. Appl. Sci. 2022, 12, 8114. [Google Scholar] [CrossRef]
- Han, L.; Li, Z.; Zhong, K.; Cheng, X.; Luo, H.; Liu, G.; Shang, J.; Wang, C.; Shi, Y. Vibration detection and motion compensation for multi-frequency phase-shifting-based 3D sensors. Sensors 2019, 19, 1368. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; ZIBLEY, P.C.; Zhang, S. Motion-induced error compensation for phase shifting profilometry. Opt. Express 2018, 26, 12632–1263762. [Google Scholar] [CrossRef]
- Wu, Z.; Guo, W.; Zhang, Q. Two-frequency phase-shifting method vs. Gray-coded-based method in dynamic fringe projection profilometry: A comparative review. Opt. Lasers Eng. 2022, 153, 106995. [Google Scholar] [CrossRef]
- Choi, H.; Park, J.; Yang, Y.-M. A Novel Quick-Response Eigenface Analysis Scheme for Brain and Computer Interfaces. Sensors 2022, 22, 5860. [Google Scholar] [CrossRef]
- Lai, X.; Zhu, G.; Chambers, J. A fuzzy adaptive extended Kalman filter exploiting the Student’s t distribution for mobile robot tracking. Meas. Sci. Technol. 2021, 32, 105017. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley and Sons: Hoboken, NJ, USA, 2006. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase Shift (rad) | δ1 (rad) | δ2 (rad) | ε1 (rad) | ε2 (rad) | ε3 (rad) | ε2 − ε1 (rad) | ε3 − ε2 (rad) | |
|---|---|---|---|---|---|---|---|---|
| Case I | 2π/3 | π/10 | π/6 | 0 | 2π/3 + π/10 | 4π/3 + π/6 | 23π/30 ≈ 2.4086 | 11π/15 ≈ 2.3038 |
| Case II | 2π/3 | π/5 | π/3 | 0 | 2π/3 + π/5 | 4π/3 + π/3 | 13π/15 ≈ 2.7189 | 4π/5 ≈ 2.5133 |
| Uniform Motion | Designed Phase Shifts between Two Frames | ||||
|---|---|---|---|---|---|
| 26th Frame | 30th Frame | ||||
| Proposed | AIA | Proposed | AIA | ||
| Phase shift | 2.0420 | 2.0392 | 2.0424 | 2.0398 | 2π/3 ≈ 2.0944 |
| Phase shift | 2.0422 | 2.0388 | 2.0353 | 2.0463 | 2π/3 ≈ 2.0944 |
| Non-Uniform Motion | Designed Phase Shifts between Two Frames | ||||
|---|---|---|---|---|---|
| 22th Frame | 30th Frame | ||||
| Proposed | AIA | Proposed | AIA | ||
| Phase shift | 1.9872 | 1.9880 | 2.0414 | 2.0391 | 2π/3 ≈ 2.0944 |
| Phase shift | 2.0494 | 2.0479 | 1.9796 | 1.9943 | 2π/3 ≈ 2.0944 |
| Stage | Time Cost (s) | |
|---|---|---|
| Window Size 31 | Window Size 35 | |
| Phase shift estimation (region-wise) | 0.746 | 0.911 |
| Wrapping phase (full-field) | 6.456 | 6.562 |
| Unwrapping phase (full-field) | 2.073 | 2.128 |
| Total | 9.275 | 9.601 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, X.; Li, Y.; Li, X.; Chen, Z.; Zhang, Q. Estimation Method Based on Extended Kalman Filter for Uncertain Phase Shifts in Phase-Measuring Profilometry. Photonics 2023, 10, 207. https://doi.org/10.3390/photonics10020207
Lai X, Li Y, Li X, Chen Z, Zhang Q. Estimation Method Based on Extended Kalman Filter for Uncertain Phase Shifts in Phase-Measuring Profilometry. Photonics. 2023; 10(2):207. https://doi.org/10.3390/photonics10020207
Chicago/Turabian StyleLai, Xin, Yueyang Li, Xunren Li, Zhengdong Chen, and Qican Zhang. 2023. "Estimation Method Based on Extended Kalman Filter for Uncertain Phase Shifts in Phase-Measuring Profilometry" Photonics 10, no. 2: 207. https://doi.org/10.3390/photonics10020207