Demodulation of Fiber Specklegram Curvature Sensor Using Deep Learning


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
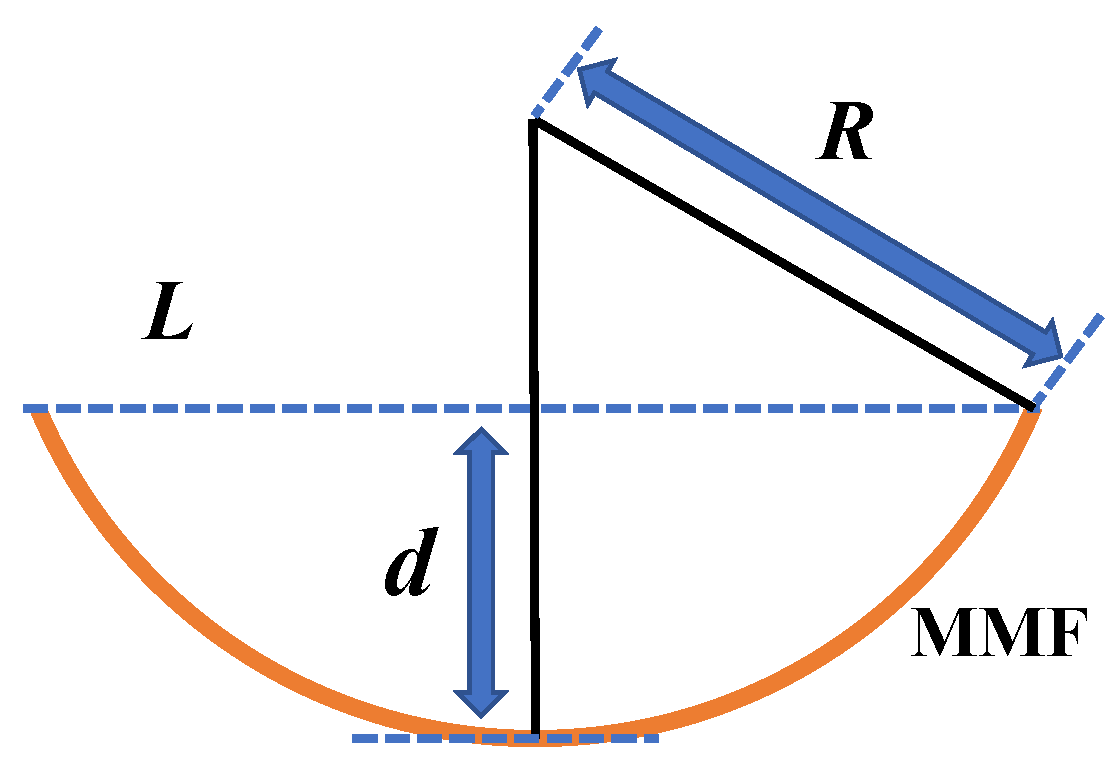
2.1. Principle of Operation
2.2. Convolutional Neural Network
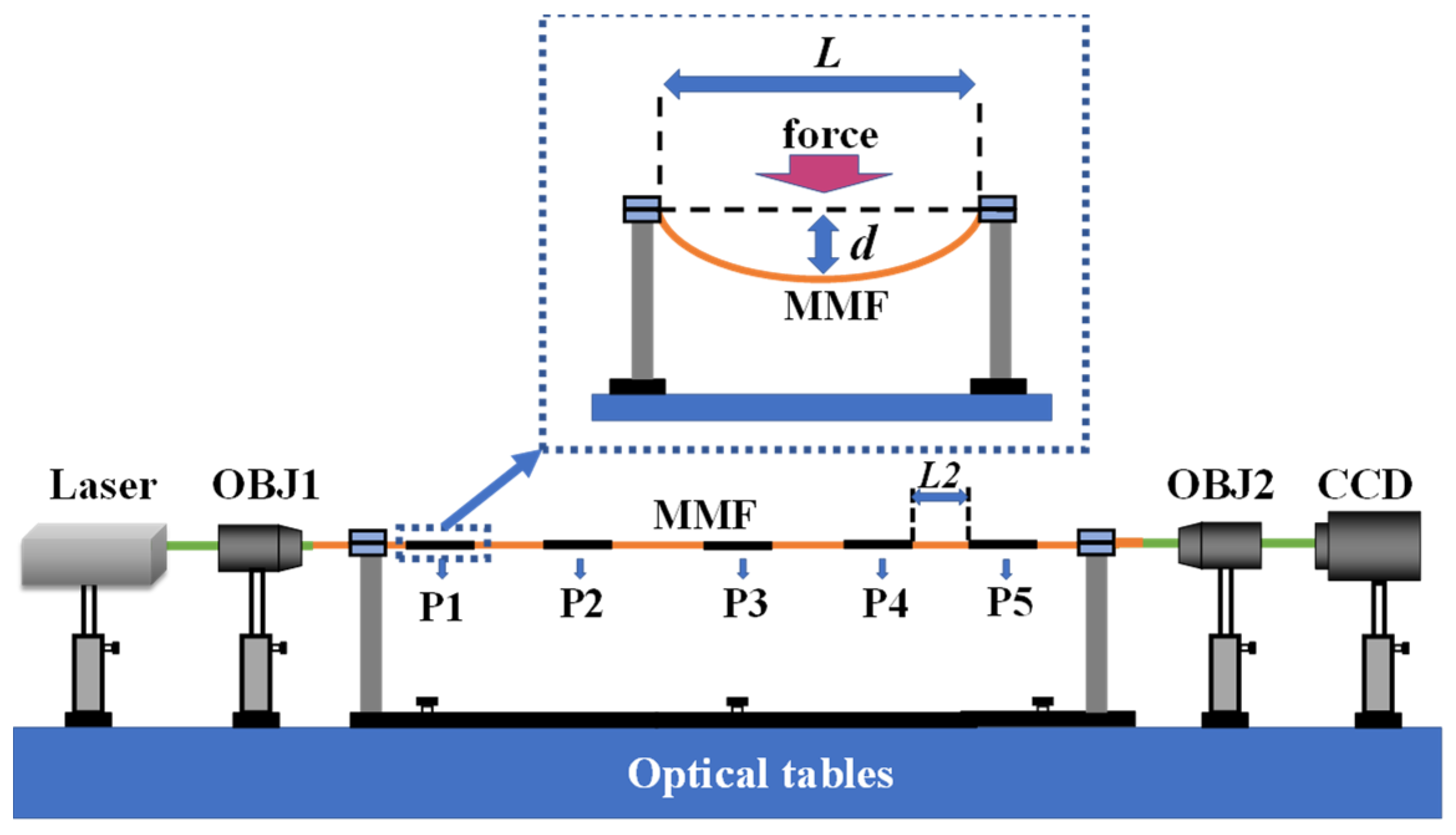
2.3. Experimental Setup
2.4. Data Preparation
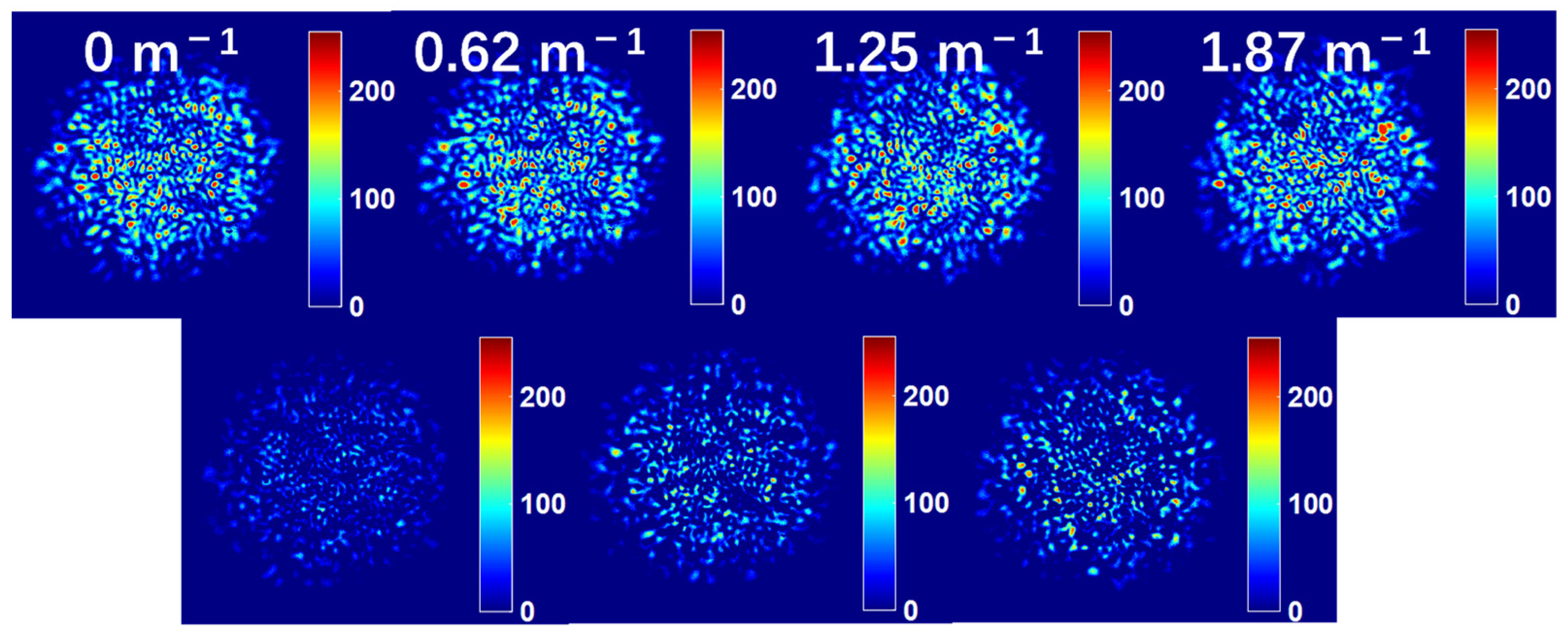
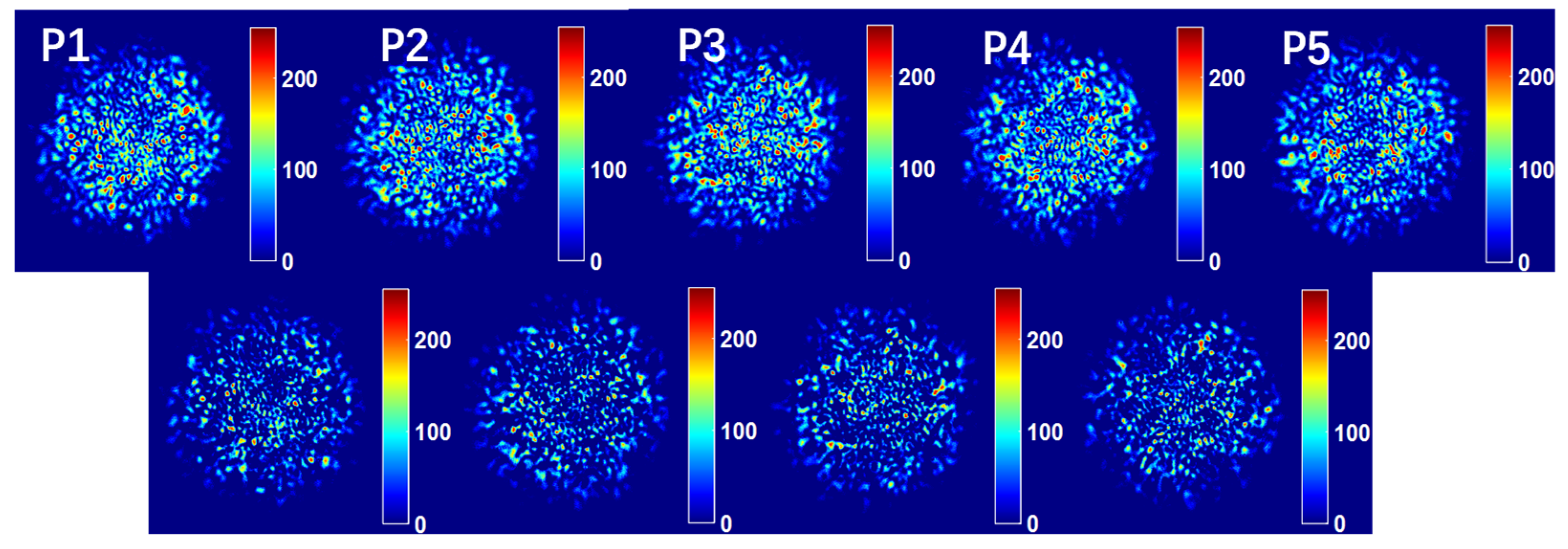
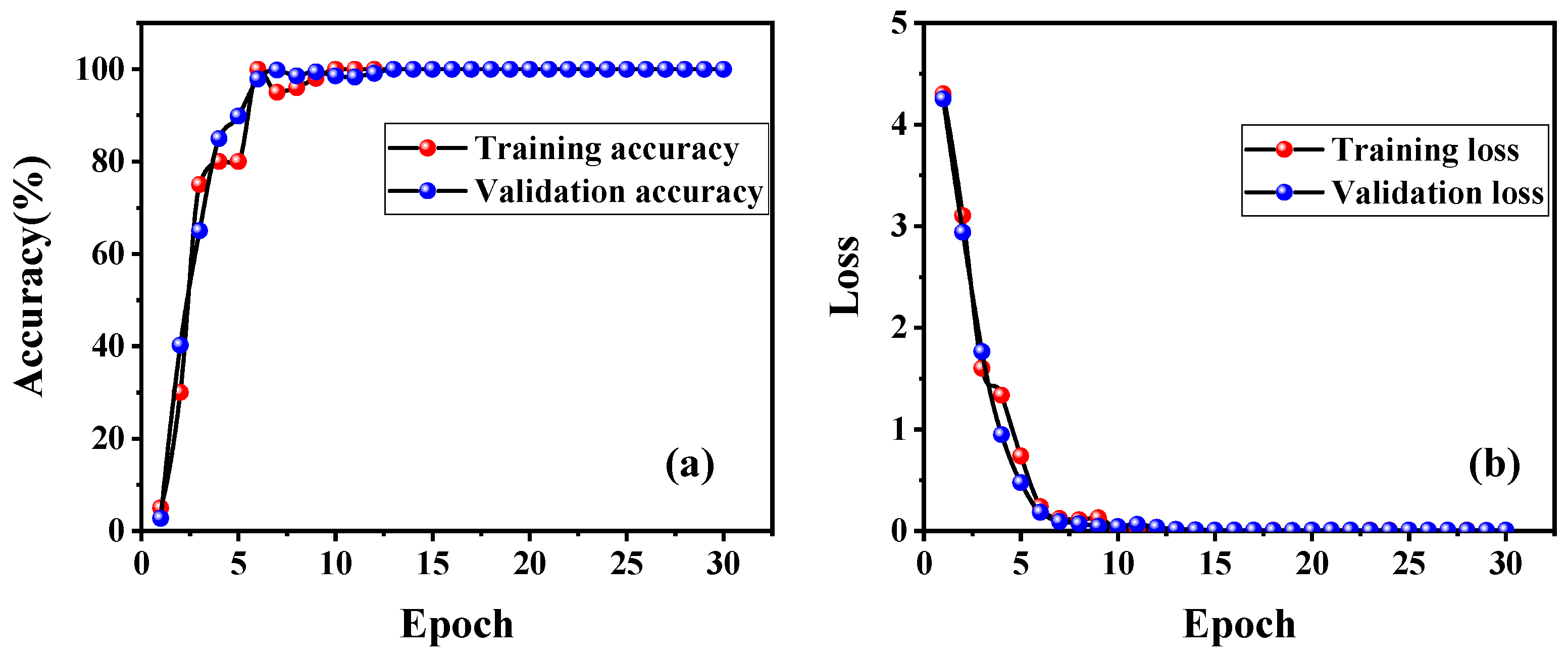
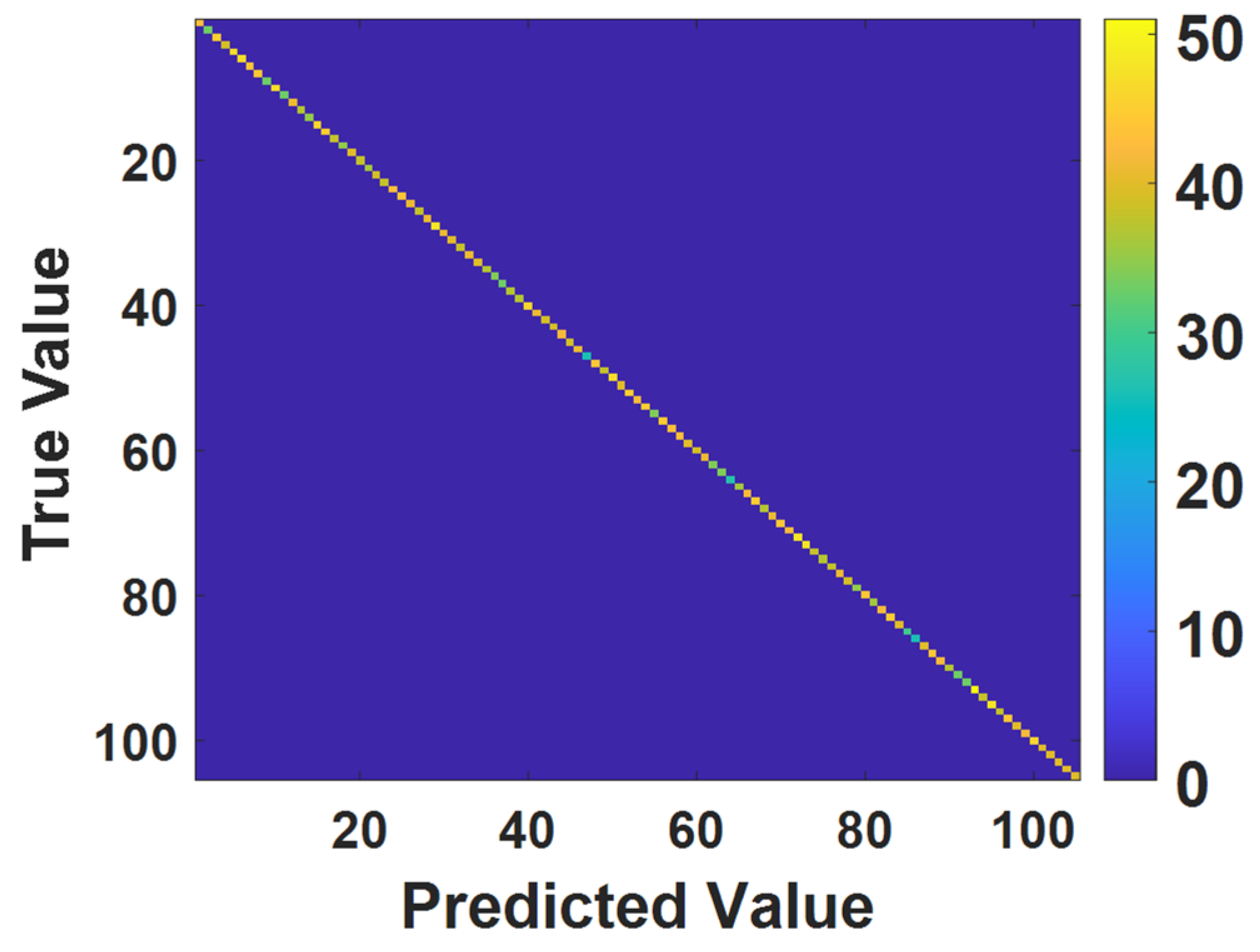
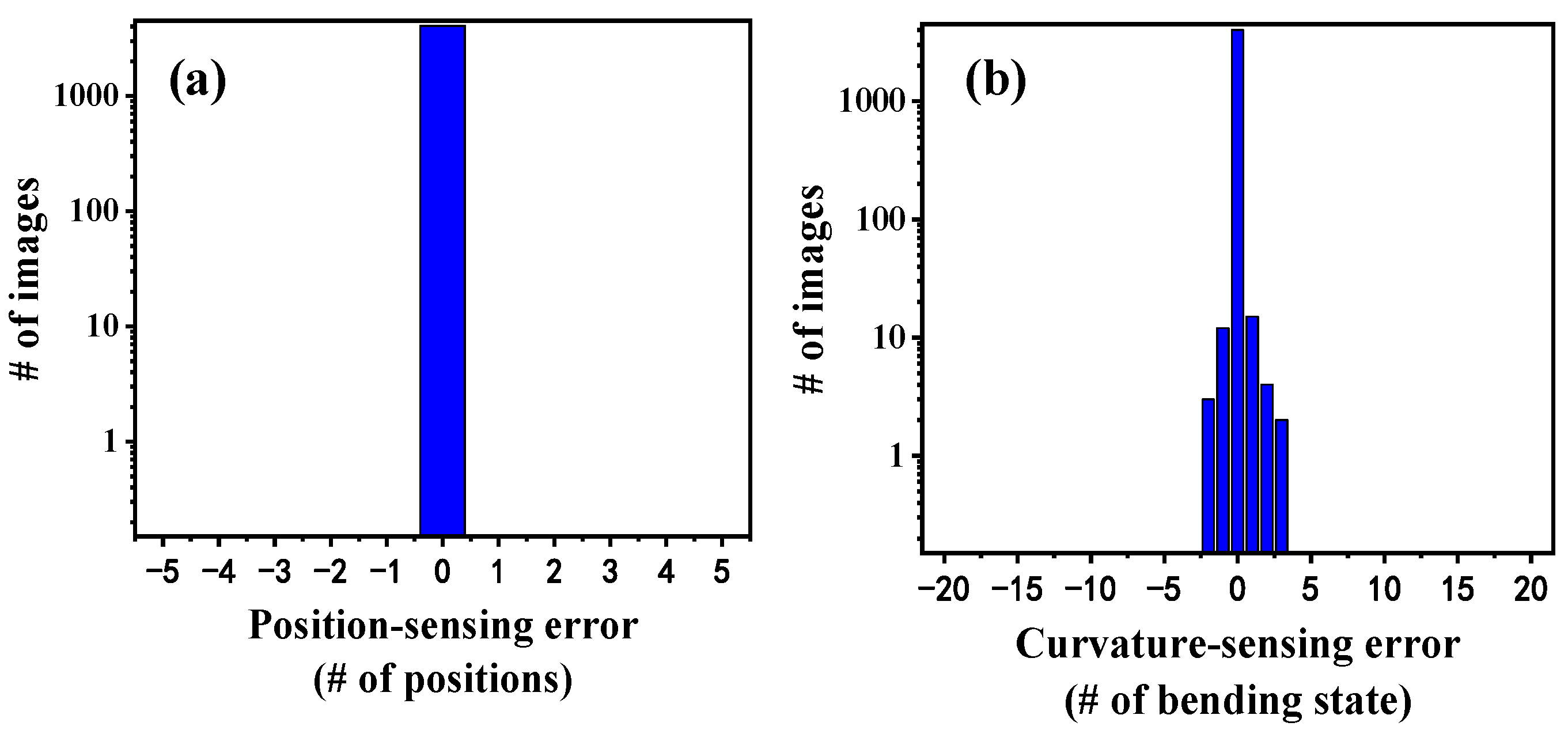
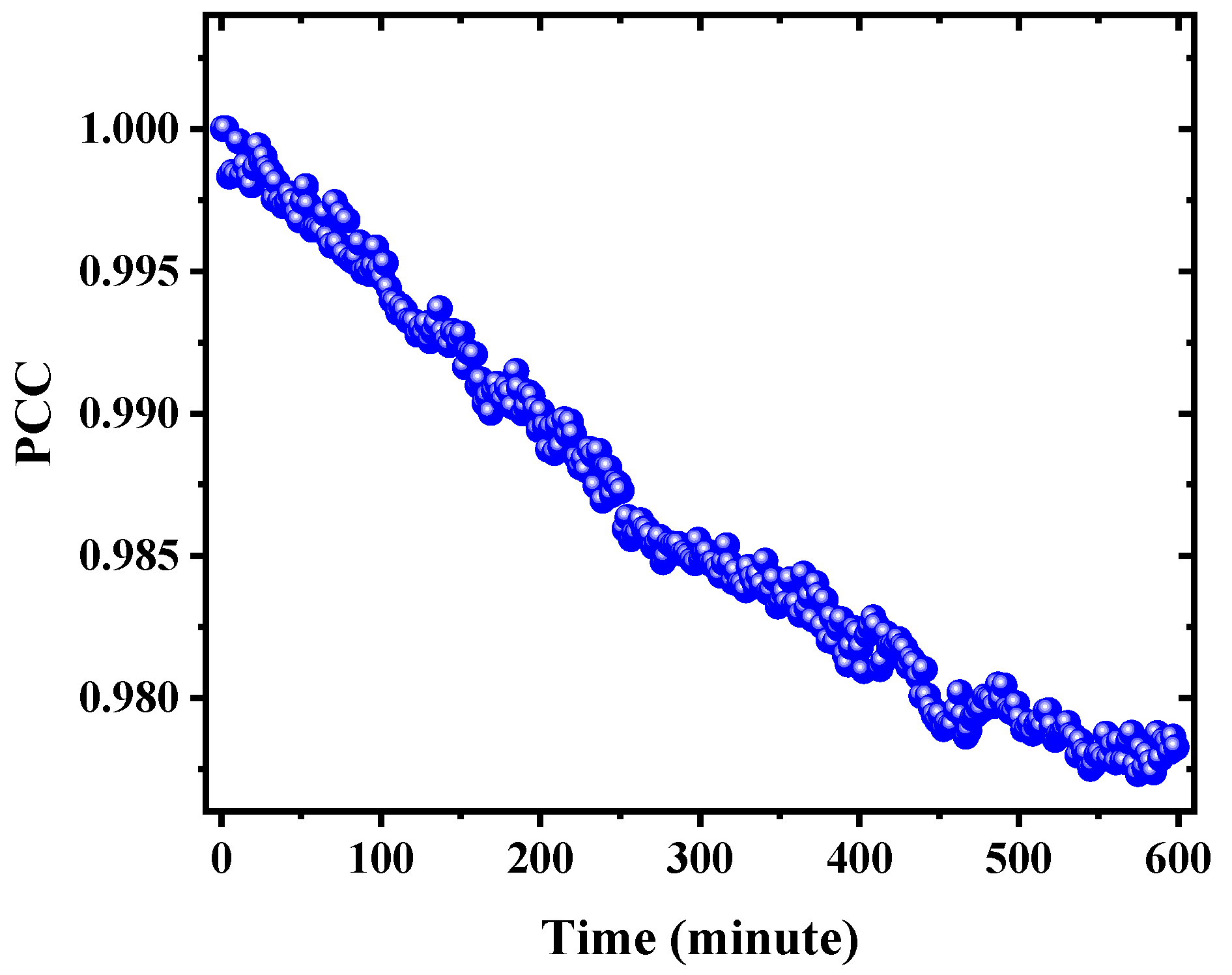
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, S.; Shan, C.; Jiang, J.; Liu, K.; Zhang, X.; Han, Q.; Lei, J.; Xiao, H.; Liu, T. Temperature-insensitive curvature sensor based on anti-resonant reflection guidance and Mach–Zehnder interferometer hybrid mechanism. Appl. Phys. Express 2019, 12, 106503. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.X.; Zhang, W.G.; Geng, P.C.; Yan, T.Y.; Chen, L.; Li, Y.P.; Hu, W. Two-Dimensional Bending Vector Sensor Based on the Multimode-3-Core-Multimode Fiber Structure. IEEE Photonics Technol. Lett. 2017, 29, 822–825. [Google Scholar] [CrossRef]
- Tian, K.; Xin, Y.; Yang, W.; Geng, T.; Ren, J.; Fan, Y.-X.; Farrell, G.; Lewis, E.; Wang, P. A Curvature Sensor Based on Twisted Single-Mode–Multimode–Single-Mode Hybrid Optical Fiber Structure. J. Light. Technol. 2017, 35, 1725–1731. [Google Scholar] [CrossRef]
- Wei, Y.; Jiang, T.; Liu, C.; Zhao, X.; Li, L.; Wang, R.; Shi, C.; Liu, C. Sawtooth Fiber MZ Vector Bending Sensor Available for Multi Parameter Measurement. J. Light. Technol. 2022, 40, 6037–6044. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhou, A.; Guo, H.; Zheng, Z.; Xu, Y.; Zhou, C.; Yuan, L. An Integrated Fiber Michelson Interferometer Based on Twin-Core and Side-Hole Fibers for Multiparameter Sensing. J. Light. Technol. 2018, 36, 993–997. [Google Scholar] [CrossRef]
- Wu, Y.; Pei, L.; Jin, W.; Jiang, Y.; Yang, Y.; Shen, Y.; Jian, S. Highly sensitive curvature sensor based on asymmetrical twin core fiber and multimode fiber. Opt. Laser Technol. 2017, 92, 74–79. [Google Scholar] [CrossRef]
- Zhao, Y.; Cai, L.; Li, X.-G. In-fiber modal interferometer for simultaneous measurement of curvature and temperature based on hollow core fiber. Opt. Laser Technol. 2017, 92, 138–141. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y.X.; Zhang, W.G.; Kong, L.X.; Yue, Y.; Yan, T.Y. Parallelized fiber Michelson interferometers with advanced curvature sensitivity plus abated temperature crosstalk. Opt. Lett. 2020, 45, 4996. [Google Scholar] [CrossRef]
- Li, Y.-P.; Zhang, W.G.; Wang, S.; Chen, L.; Zhang, Y.X.; Wang, B.; Yan, T.Y.; Li, X.Y.; Hu, W. Bending Vector Sensor Based on a Pair of Opposite Tilted Long-Period Fiber Gratings. IEEE Photonics Technol. Lett. 2017, 29, 224–227. [Google Scholar] [CrossRef]
- Wang, Y.P.; Rao, Y.J. A novel long period fiber grating sensor measuring curvature and determining bend-direction simultaneously. IEEE Sens. J. 2005, 5, 839–843. [Google Scholar] [CrossRef]
- Zhang, Y.X.; Zhang, W.G.; Zhang, Y.S.; Wang, S.; Bie, L.J.; Kong, L.X.; Geng, P.C.; Yan, T.Y. Bending Vector Sensing Based on Arch-Shaped Long-Period Fiber Grating. IEEE Sens. J. 2018, 18, 3125–3130. [Google Scholar] [CrossRef]
- Barrera, D.; Madrigal, J.; Sales, S. Long Period Gratings in Multicore Optical Fibers for Directional Curvature Sensor Implementation. J. Light. Technol. 2018, 36, 1063–1068. [Google Scholar] [CrossRef]
- Li, Z.; Liu, S.; Bai, Z.; Fu, C.; Zhang, Y.; Sun, Z.; Liu, X.; Wang, Y. Residual-stress-induced helical long period fiber gratings for sensing applications. Opt. Express 2018, 26, 24114–24123. [Google Scholar] [CrossRef] [PubMed]
- Lai, M.; Zhang, Y.; Li, Z.; Zhang, W.; Gao, H.; Ma, L.; Ma, H.; Yan, T. High-sensitivity bending vector sensor based on γ-shaped long-period fiber grating. Opt. Laser Technol. 2021, 142, 107255. [Google Scholar] [CrossRef]
- Zhang, Y.S.; Zhang, W.G.; Chen, L.; Zhang, Y.-X.; Wang, S.; Yu, L.; Li, Y.P.; Geng, P.-C.; Yan, T.-Y.; Li, X.-Y.; et al. Concave-lens-like long-period fiber grating bidirectional high-sensitivity bending sensor. Opt. Lett. 2017, 42, 3892–3895. [Google Scholar] [CrossRef]
- Yang, K.; He, J.; Liao, C.; Wang, Y.; Liu, S.; Guo, K.; Zhou, J.; Li, Z.; Tan, Z. Femtosecond Laser Inscription of Fiber Bragg Grating in Twin-Core Few-Mode Fiber for Directional Bend Sensing. J. Light. Technol. 2017, 35, 4670–4676. [Google Scholar] [CrossRef]
- Koo, B.; Kim, D.H. Directional bending sensor based on triangular shaped fiber Bragg gratings. Opt. Express 2020, 28, 6572–6581. [Google Scholar] [CrossRef]
- Yi, X.; Chen, X.; Fan, H.; Shi, F.; Cheng, X.; Qian, J. Separation method of bending and torsion in shape sensing based on FBG sensors array. Opt. Express 2020, 28, 9367–9383. [Google Scholar] [CrossRef]
- Zhu, F.; Zhang, Y.; Qu, Y.; Jiang, W.; Su, H.; Guo, Y.; Qi, K. Stress-insensitive vector curvature sensor based on a single fiber Bragg grating. Opt. Fiber Technol. 2020, 54, 102133. [Google Scholar] [CrossRef]
- Fujiwara, E.; da Silva, L.E.; Cabral, T.D.; de Freitas, H.E.; Wu, Y.T.; Cordeiro, C.M.D.B. Optical Fiber Specklegram Chemical Sensor Based on a Concatenated Multimode Fiber Structure. J. Light. Technol. 2019, 37, 5041–5047. [Google Scholar] [CrossRef]
- Rodríguez-Cuevas, A.; Peña, E.R.; Rodríguez-Cobo, L.; Lomer, M.; López-Higuera, J.M. Low-cost fiber specklegram sensor for noncontact continuous patient monitoring. J. Biomed. Opt. 2017, 22, 037001. [Google Scholar] [CrossRef]
- Hu, S.; Liu, H.; Liu, B.; Lin, W.; Zhang, H.; Song, B.; Wu, J. Self-temperature compensation approach for fiber specklegram magnetic field sensor based on polarization specklegram analysis. Meas. Sci. Technol. 2022, 33, 115101. [Google Scholar] [CrossRef]
- Gómez, J.A.; Lorduy, H.; Salazar, Á. Improvement of the dynamic range of a fiber specklegram sensor based on volume speckle recording in photorefractive materials. Opt. Lasers Eng. 2011, 49, 473–480. [Google Scholar] [CrossRef]
- Gómez, J.A.; Salazar, Á. Self-correlation fiber specklegram sensor using volume characteristics of speckle patterns. Opt. Lasers Eng. 2012, 50, 812–815. [Google Scholar] [CrossRef]
- Chen, W.; Feng, F.; Chen, D.; Lin, W.; Chen, S.-C. Precision non-contact displacement sensor based on the near-field characteristics of fiber specklegrams. Sens. Actuators A Phys. 2019, 296, 1–6. [Google Scholar] [CrossRef]
- Rodriguez-Cobo, L.; Lomer, M.; Cobo, A.; Lopez-Higuera, J.M. Optical fiber strain sensor with extended dynamic range based on specklegrams. Sens. Actuators A Phys. 2013, 203, 341–345. [Google Scholar] [CrossRef]
- Feng, F.; Chen, W.; Chen, D.; Lin, W.; Chen, S.-C. In-situ ultrasensitive label-free DNA hybridization detection using optical fiber specklegram. Sens. Actuators B Chem. 2018, 272, 160–165. [Google Scholar] [CrossRef]
- Gao, H.; Chen, Z.; Zhang, Y.-X.; Zhang, W.-G.; Hu, H.-F.; Yan, T.-Y. Rapid Mode Decomposition of Few-Mode Fiber By Artificial Neural Network. J. Light. Technol. 2021, 39, 6294–6300. [Google Scholar] [CrossRef]
- Gao, H.; Hu, H.; Zhao, Y.; Li, J. A real-time fiber mode demodulation method enhanced by convolution neural network. Opt. Fiber Technol. 2019, 50, 139–144. [Google Scholar] [CrossRef]
- Li, H.; Liang, H.; Hu, Q.; Wang, M.; Wang, Z. Deep learning for position fixing in the micron scale by using convolutional neural networks. Chin. Opt. Lett. 2020, 18, 050602. [Google Scholar] [CrossRef]
- Fujiwara, E.; Wu, Y.T.; Santos, M.F.M.; Schenkel, E.A.; Suzuki, C.K. Optical Fiber Specklegram Sensor for Measurement of Force Myography Signals. IEEE Sens. J. 2017, 17, 951–958. [Google Scholar] [CrossRef]
- Li, G.; Liu, Y.; Qin, Q.; Zou, X.; Wang, M.; Yan, F. Deep learning based optical curvature sensor through specklegram detection of multimode fiber. Opt. Laser Technol. 2022, 149, 107873. [Google Scholar] [CrossRef]
- Liu, Y.; Li, G.; Qin, Q.; Tan, Z.; Wang, M.; Yan, F. Bending recognition based on the analysis of fiber specklegrams using deep learning. Opt. Laser Technol. 2020, 131, 106424. [Google Scholar] [CrossRef]
- Liang, Q.; Li, Y.; Tao, J.; Wang, X.; Wang, T.; Gao, X.; Zhou, P.; Xu, B.; Zhao, C.; Kang, J.; et al. Demodulation of Fabry-Pérot sensors using random speckles. Opt. Lett. 2022, 47, 4806–4809. [Google Scholar] [CrossRef] [PubMed]
- Ma, W.; Liu, Z.; Kudyshev, Z.A.; Boltasseva, A.; Cai, W.; Liu, Y. Deep learning for the design of photonic structures. Nat. Photonics 2020, 15, 77–90. [Google Scholar] [CrossRef]
- Yang, C.; Chen, J.; Li, Z.; Huang, Y. Structural Crack Detection and Recognition Based on Deep Learning. Appl. Sci. 2021, 11, 2868. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Wang, X.; Wang, Y.; Zhang, K.; Althoefer, K.; Su, L. Learning to sense three-dimensional shape deformation of a single multimode fiber. Sci. Rep. 2022, 12, 12684. [Google Scholar] [CrossRef] [PubMed]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Gu, L.; Gao, H.; Hu, H. Demodulation of Fiber Specklegram Curvature Sensor Using Deep Learning. Photonics 2023, 10, 169. https://doi.org/10.3390/photonics10020169
Yang Z, Gu L, Gao H, Hu H. Demodulation of Fiber Specklegram Curvature Sensor Using Deep Learning. Photonics. 2023; 10(2):169. https://doi.org/10.3390/photonics10020169
Chicago/Turabian StyleYang, Zihan, Liangliang Gu, Han Gao, and Haifeng Hu. 2023. "Demodulation of Fiber Specklegram Curvature Sensor Using Deep Learning" Photonics 10, no. 2: 169. https://doi.org/10.3390/photonics10020169