
Preconditioning Technique for an Image Deblurring Problem with the Total Fractional-Order Variation Model

Abstract
:1. Introduction
- We propose two block triangular preconditioners and study the bounds of the eigenvalues of the preconditioned matrices. In addition, we demonstrate the effectiveness of our algorithm in the numerical results by starting with the fixed point iteration (FPI) Method as in [28] to linearize the nonlinear primal system , then we use the preconditioned conjugate gradient (PCG) method [29] for the inner iterations. After that, we use FGMRES method for the outer iterations. We illustrate the performance of our approach by calculating the peak signal-to-noise ratio (PSNR), CPU-time, residuals and the number of iterations. Finally, we calculate the PSNR for different values of the order of the fractional derivative, , to show the impact of using the TFOV model.
2. Problem Setup
- Tikhonov regularization [32] is used to stabilize the problem (2) and also called as penalized least squares. In this case, the problem is then to find a u that minimize the functionalwith a small positive parameter called the regularization parameter that controls the trade-off between the data fitting term (the first term) and the regularization term (the second term). denotes the norm in . The functional J has to be known. Common choices for the functional J arethe above functional gives what is known as Tikhonov regularization with the identity, andwhere denotes Euclidean norm, and . When u is discontinuous, the functional in (5) often induces either oscillations or ringing. However, in the functional (6), we need to assume that u is a smooth function. Although, this model is easy to use and simple to calculate, it cannot preserve image edges. Hence, both the above choices are unsuitable for image processing applications when we need to recover sharp contrasts modeled by discontinuities in u [28].
- Total Variation (TV): One of the most commonly used regularization models is the TV. It was introduced for the first time [33] in edge-preserving image denoising by Rudin, Osher and Fatemi (ROF) and it has improved in recent years for image de-noising, de-blurring, in-painting, blind de-convolution, and processing [1,2,3,4,34,35,36,37,38,39]. When using the TV model, the problem is then to find a u that minimizes the functionalwhereNote that, we do not require the continuity of u. Hence, (8) is a good regularization in image processing. However, the Euclidean norm, , is not differentiable at zero. Common modification is to add a small positive parameter . The resulting is in the modified functional:The well-posedness of the above minimization problem (7) with the functional given in (9) is studied and analyzed in the literature, such as in [1]. The success of using TV regularization is that TV gives a balance between the ability to describe piecewise smooth images and the complexity of the resulting algorithms. Moreover, the TV regularization performs very well for removing noise/blur while preserving edges. Despite the good contributions of the TV regularization mentioned above, it favors a piecewise constant solution in the bounded variation (BV) space which often leads to the staircase effect. Thus, stair casing remains one of the drawbacks of the TV regularization. To remove the stair case effects, two modifications to the TV regularization model have been used in the literature. The first approach is to higher the order of the derivatives in the TV regularization term, such as the mean curvature or a nonlinear combination of the first and second derivatives [40,41,42,43,44,45]. These modifications remove/reduce the staircase effects and they are effective but they are computationally expensive due to the increasing the order of the derivatives or due to the nonlinearity terms. The second approach is to use the fractional-order derivatives in the TV regularization terms as shown in [46,47].
2.1. Fractional-Order Derivative in Image Deblurring
2.2. The TFOV-Model
2.3. Fractional-Order Derivatives
- Riemann–Liouville (RL) definitions: The left- and right-sided RL derivatives of order of a function are given as follows:andwhere is the gamma function, defined by
- Grünwald–Letnikov (GL) definitions: The left- and right-sided GL derivatives are defined byandwhere
- Caputo (C) definitions: The left- and right-sided Caputo derivatives are defined byandwhere denotes the -order derivative of function .
2.4. Euler-Lagrange Equations
2.5. Discretization of the Fractional Derivative
- (1)
- (2)
- .
2.6. Difficulties in TFOV-Model Compared to TV-Model
3. Preconditioning Technique
4. Preconditioned GMRES Algorithm
| Algorithm 1 Preconditioned GMRES Algorithm |
|
| Algorithm 2 -Conjugate Gradient Method Algorithm |
|
| Algorithm 3 -Conjugate Gradient Method Algorithm |
|
Eigenvalues Estimates
5. Numerical Results
5.1. The Parameters and Selecting
5.2. GMRES versus FGMRES
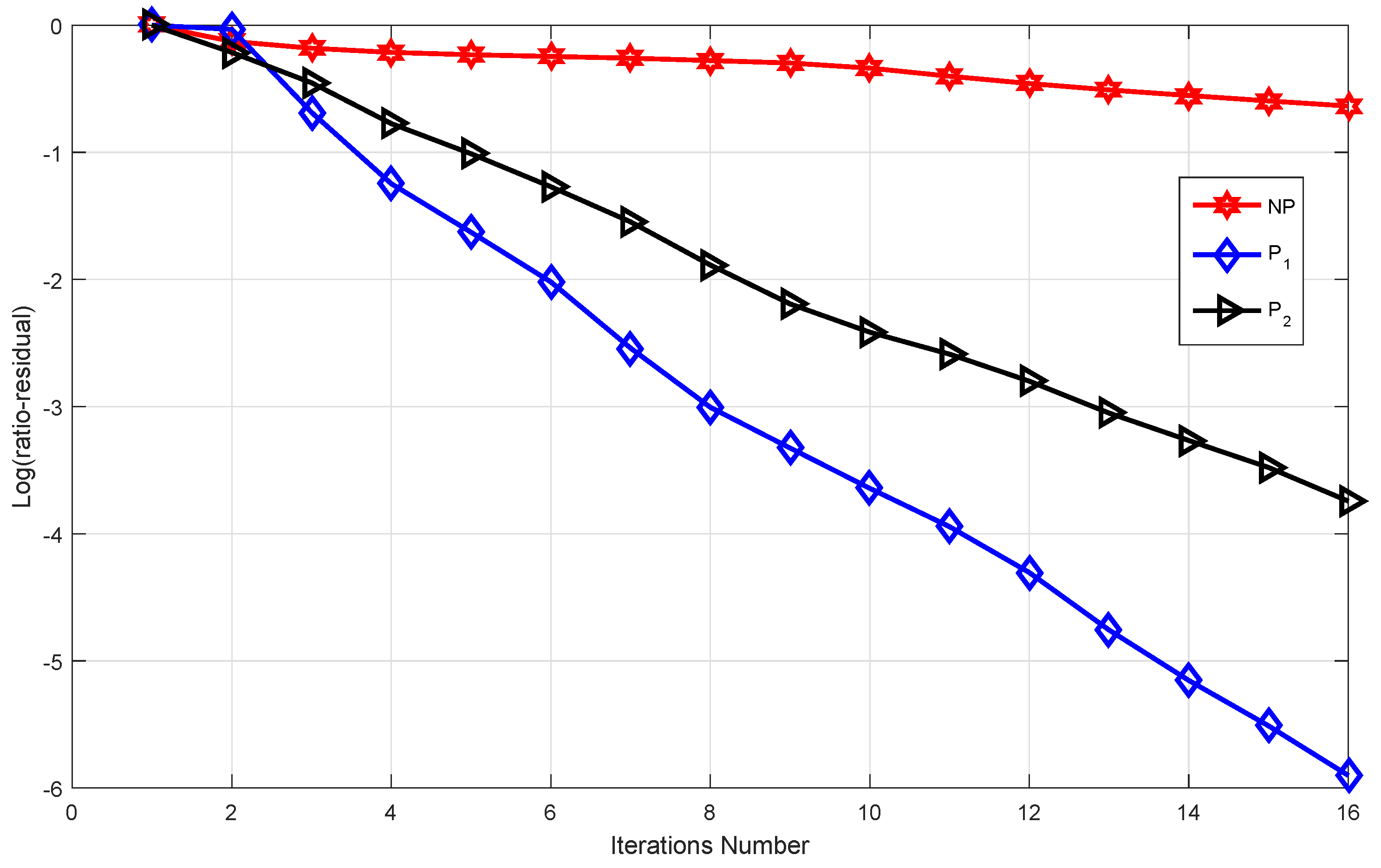
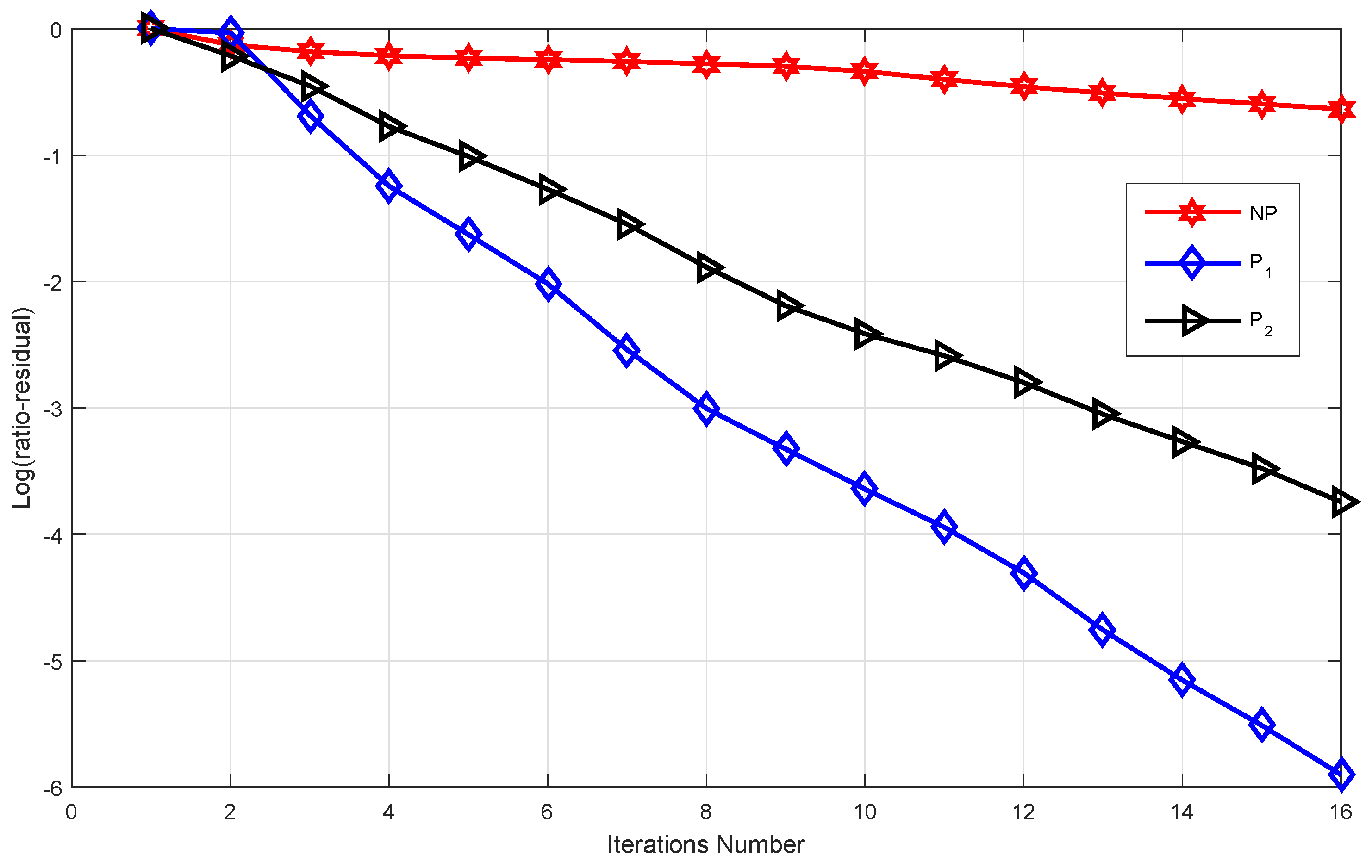
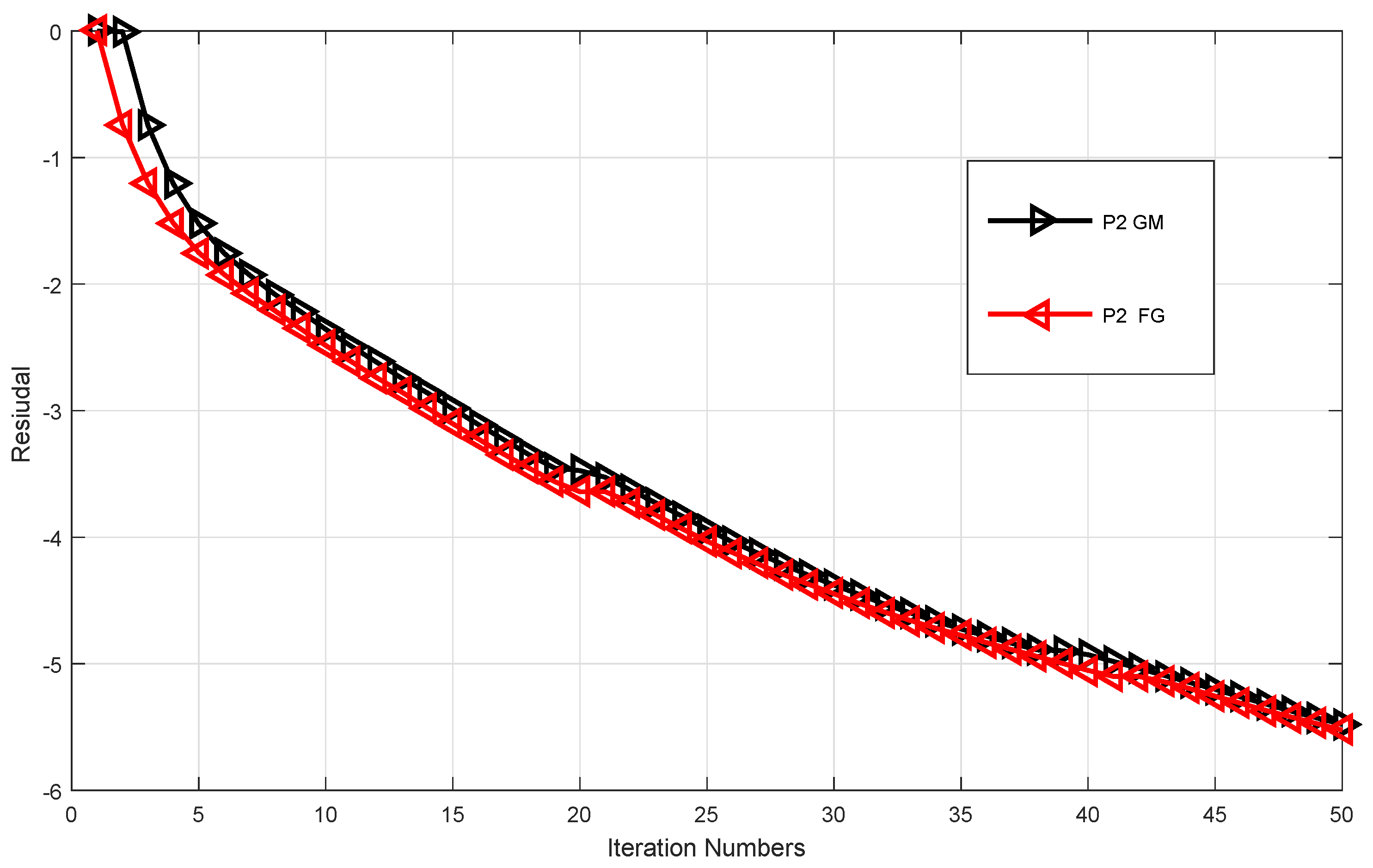
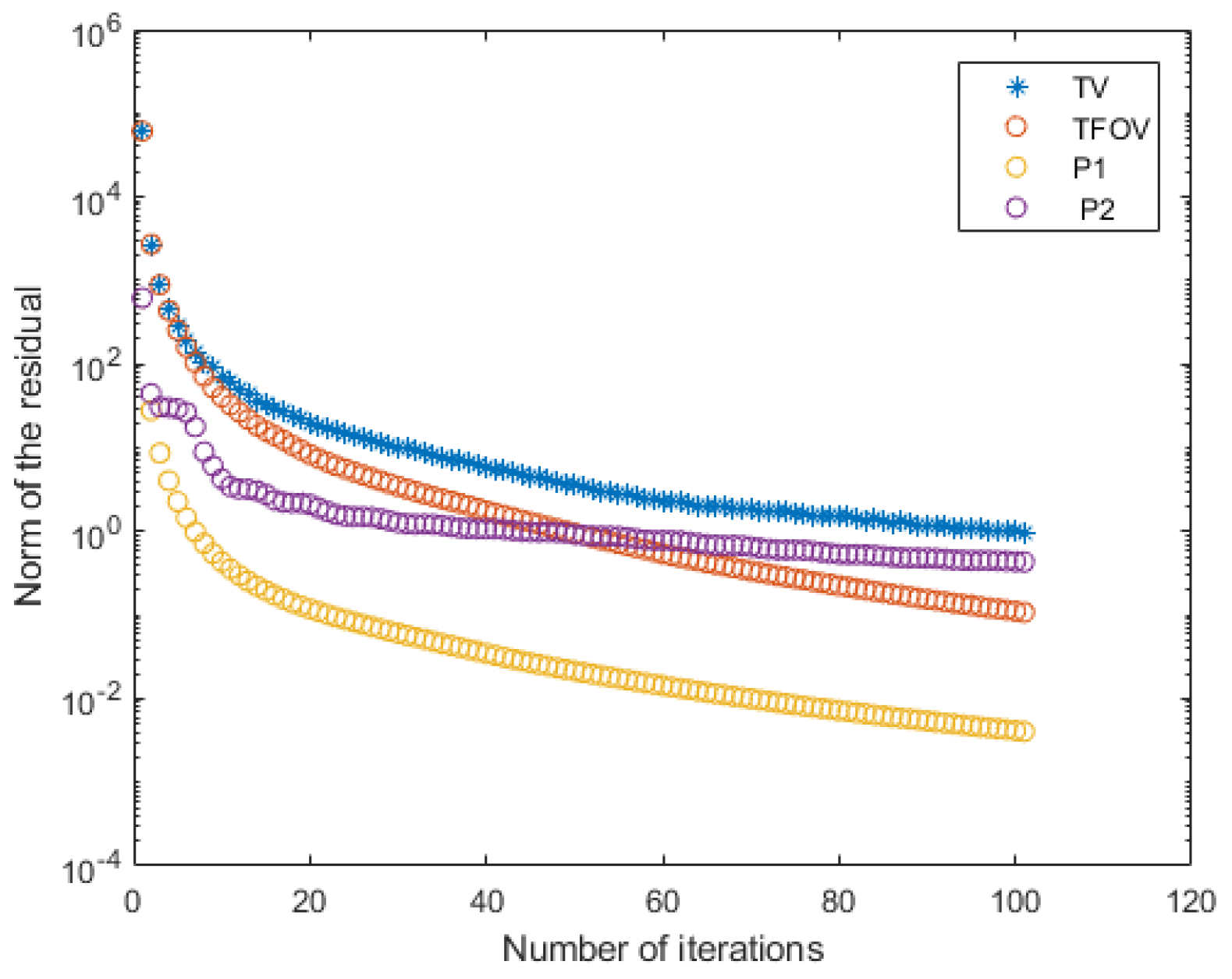
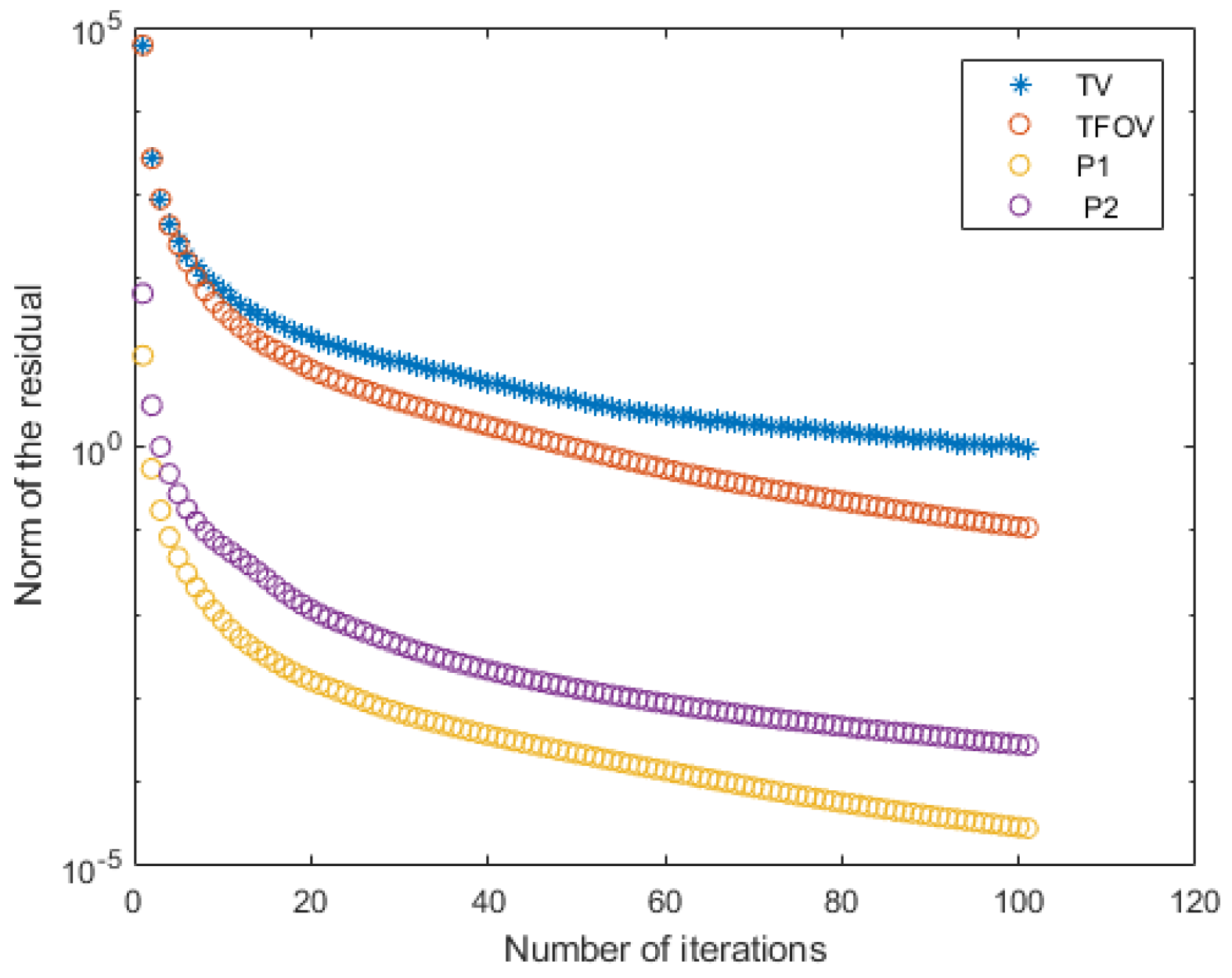
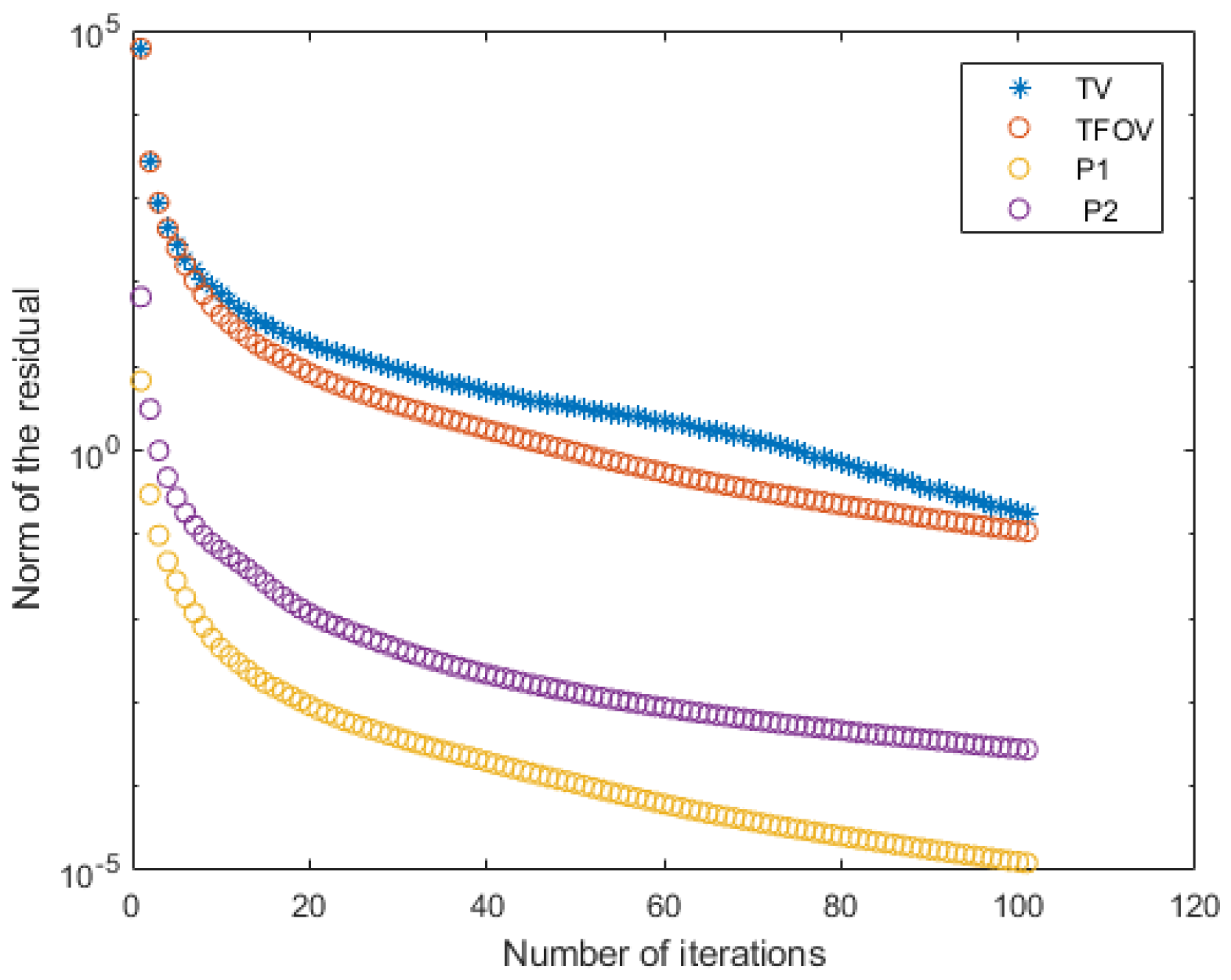
- From Figure 31, Figure 32 and Figure 33, we can clearly see the effectiveness of preconditioning. For all values of N, the number of and iterations is much lower than the number of TFOV-based NP and TV-based iterations to reach the required accuracy . The later fixed-point iterations also have similar results.
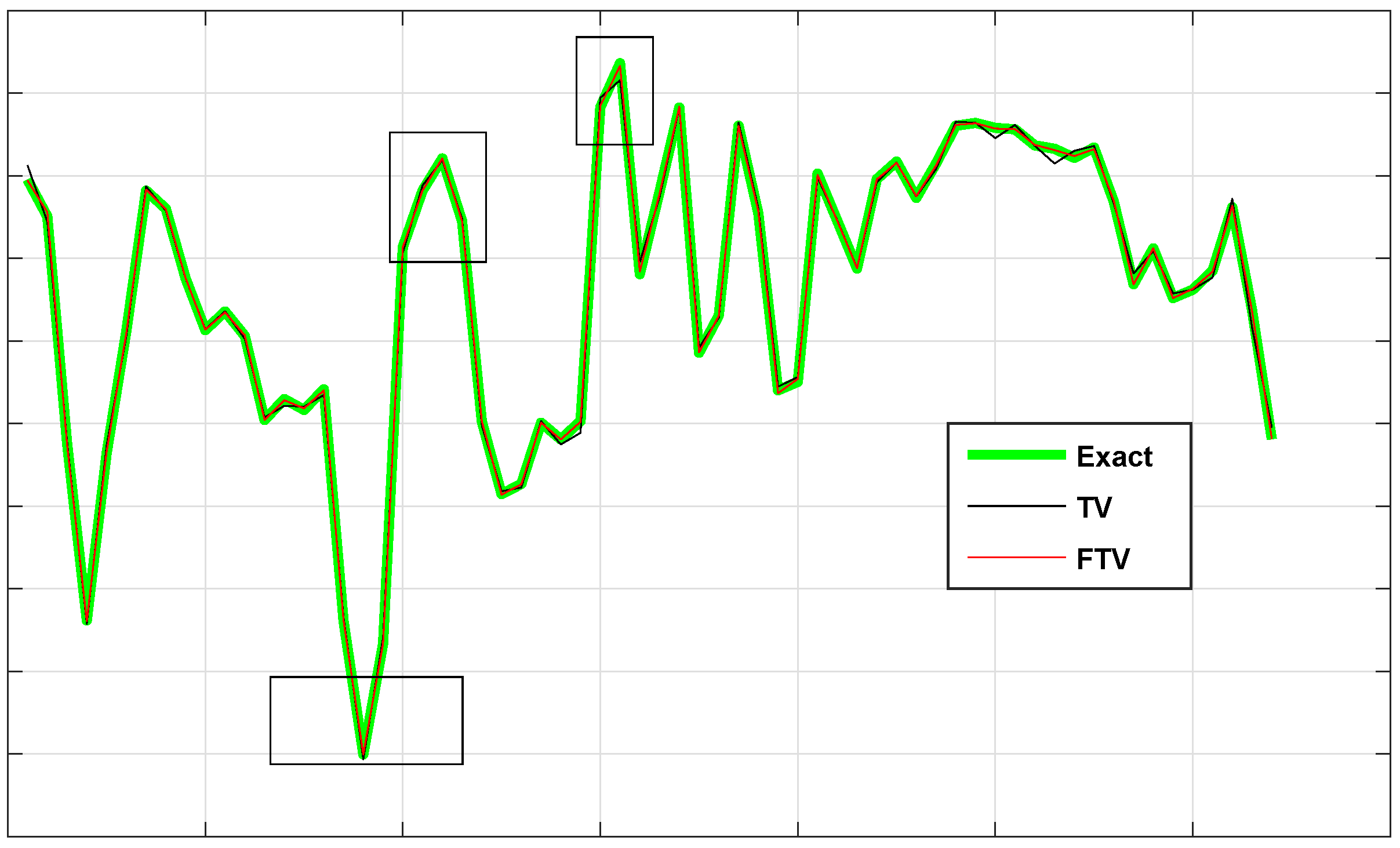
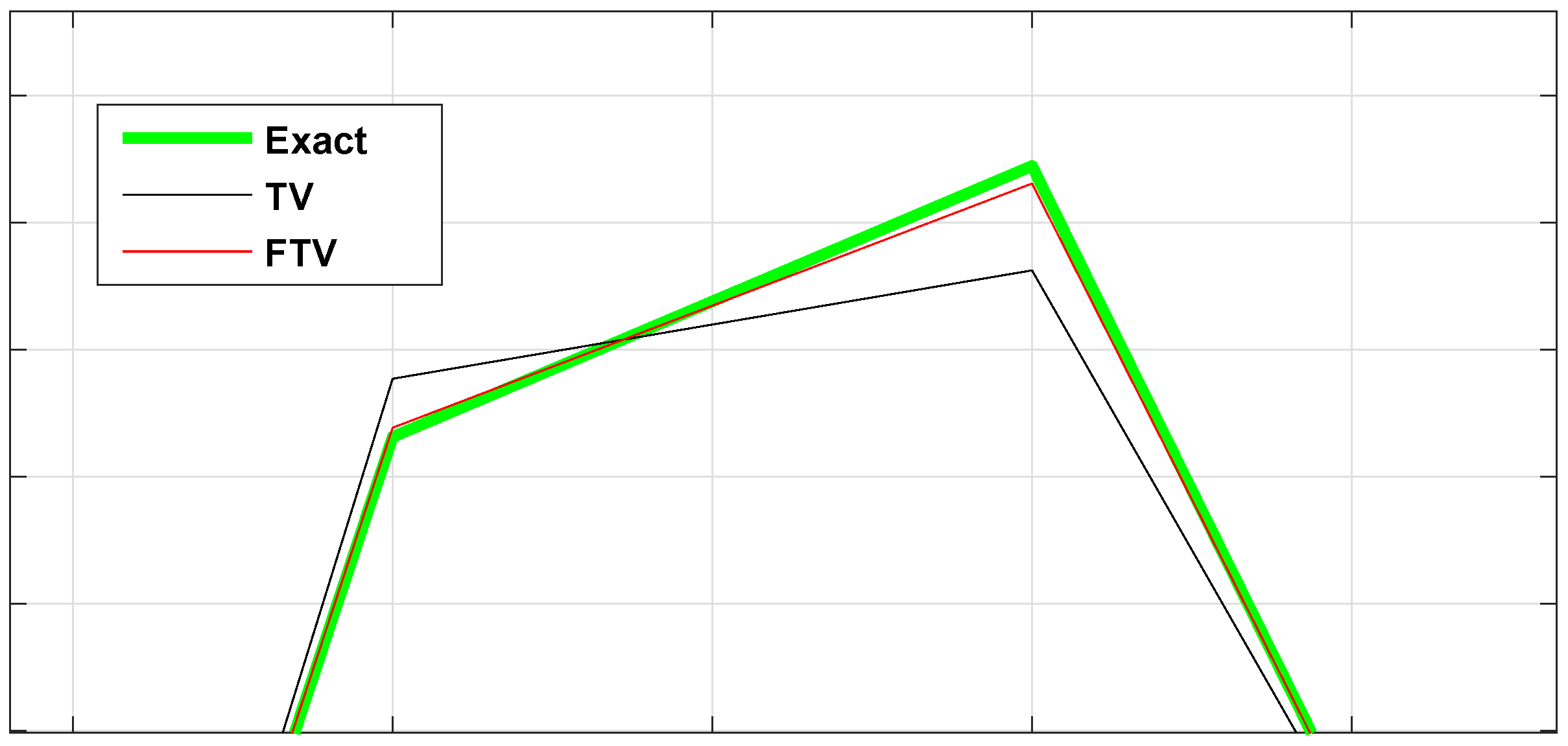
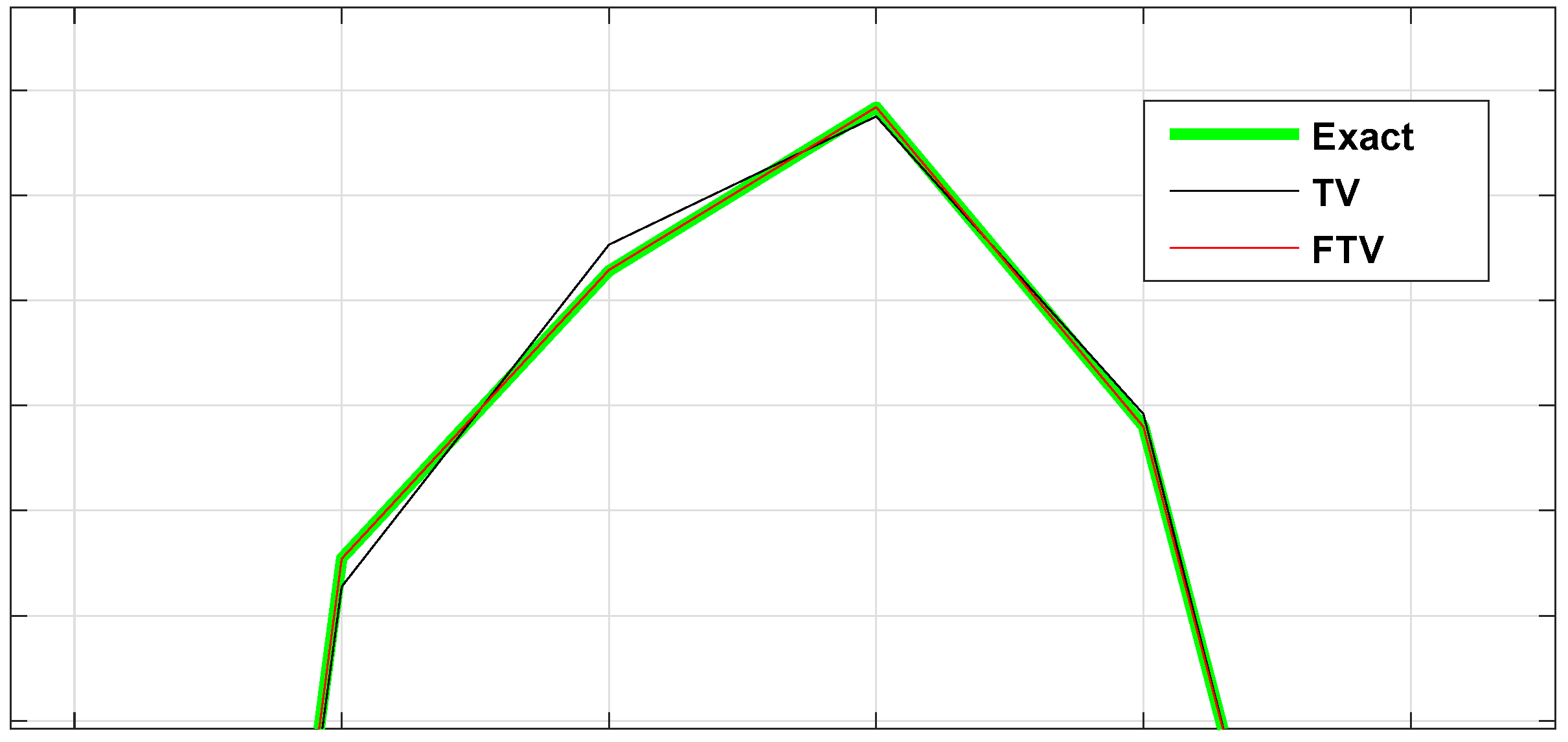
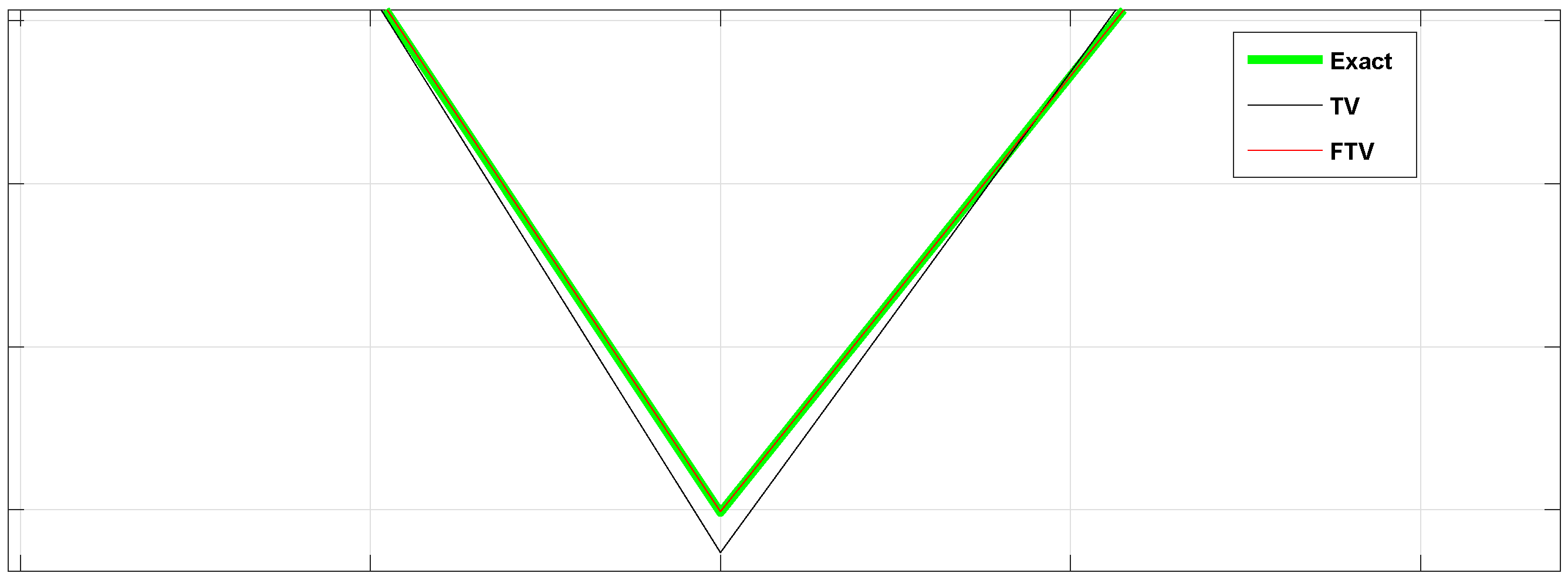
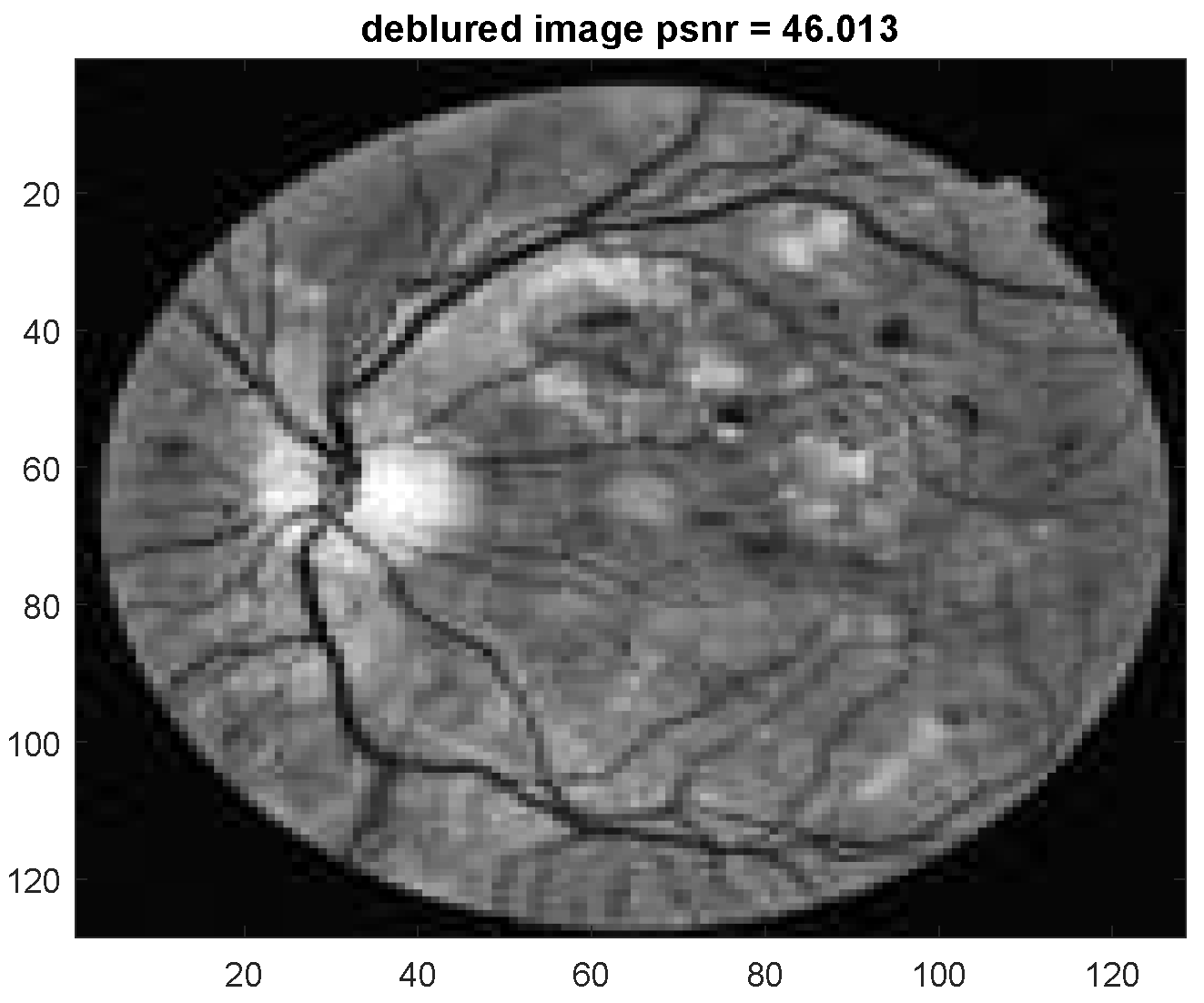
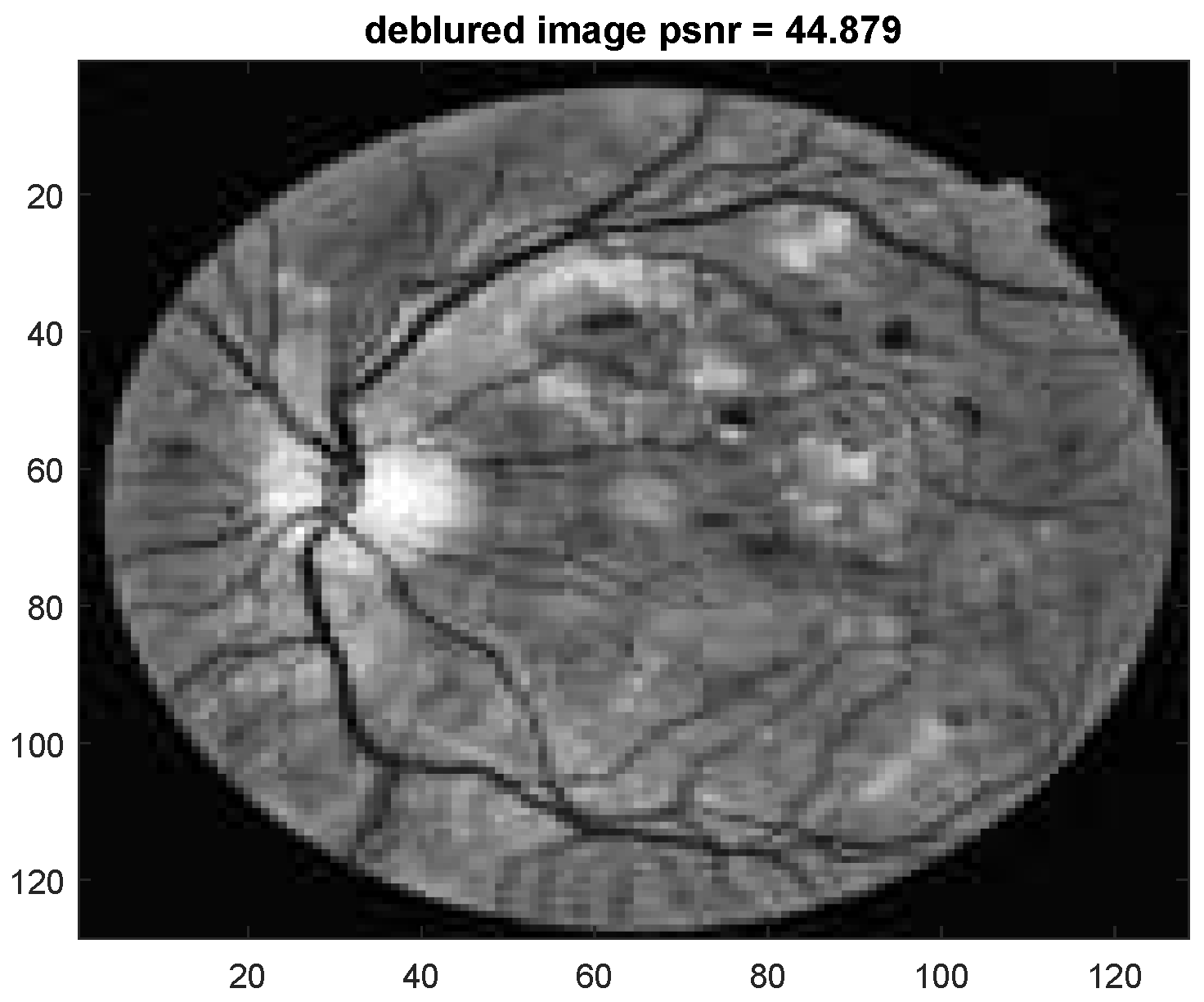
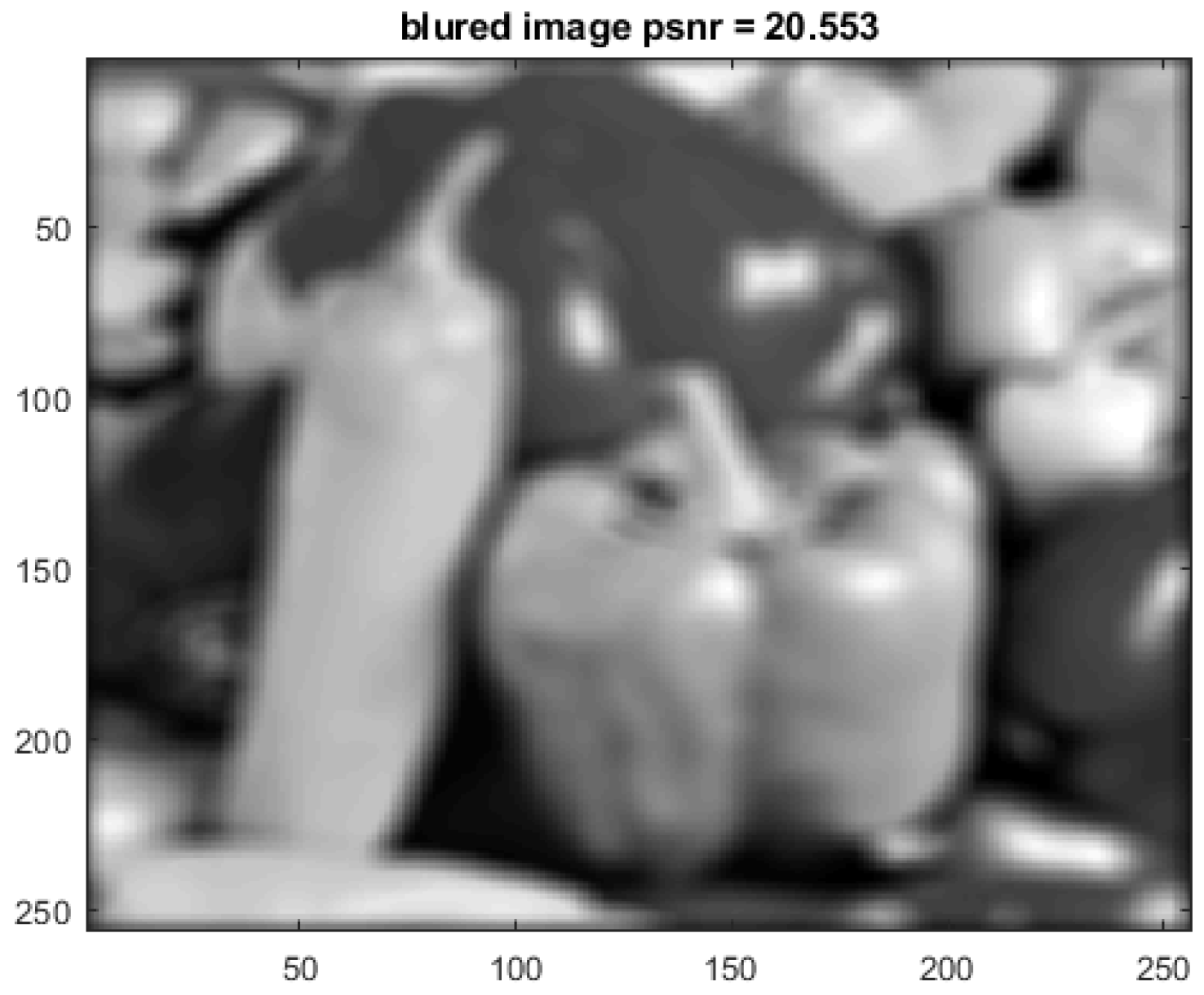
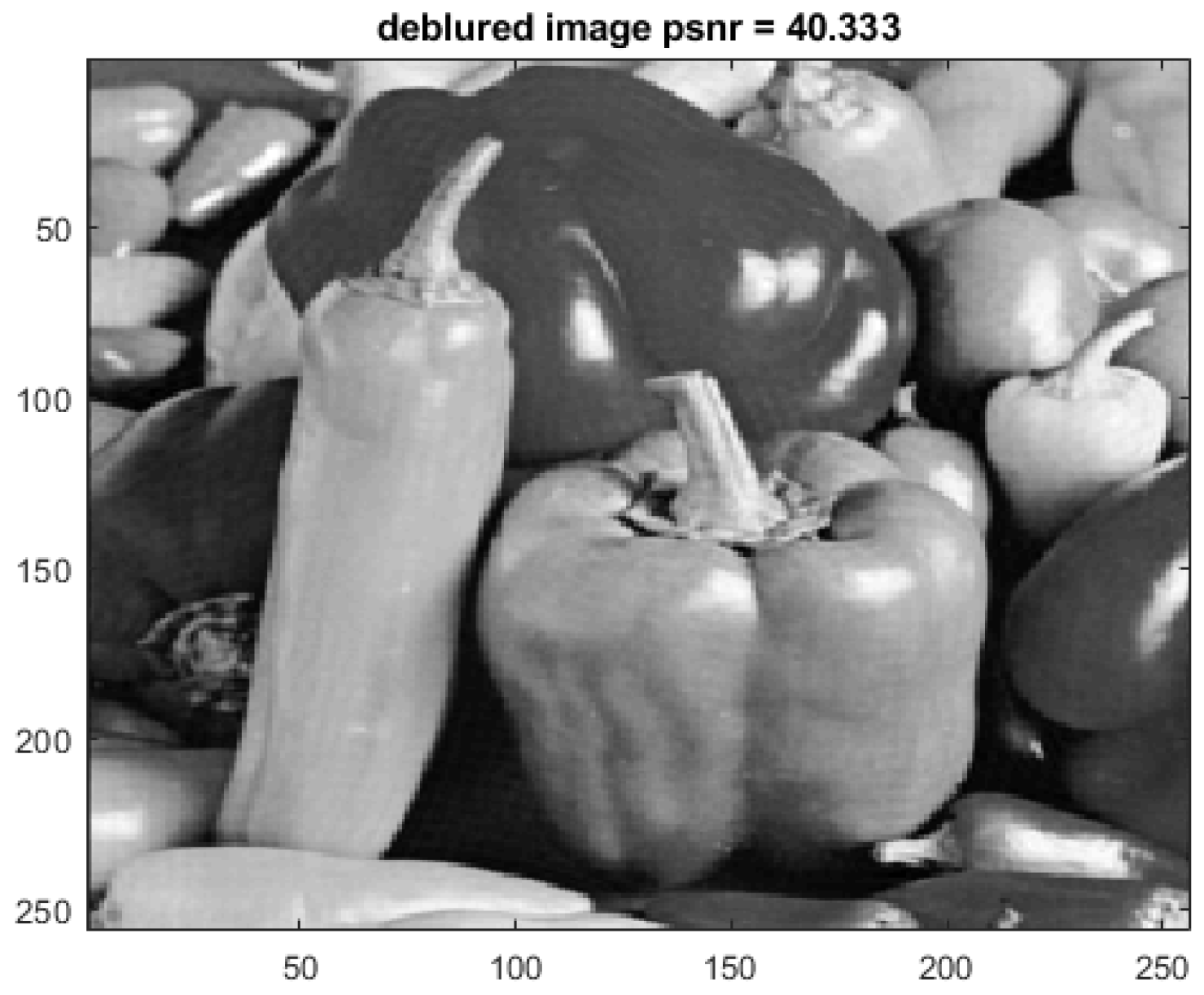
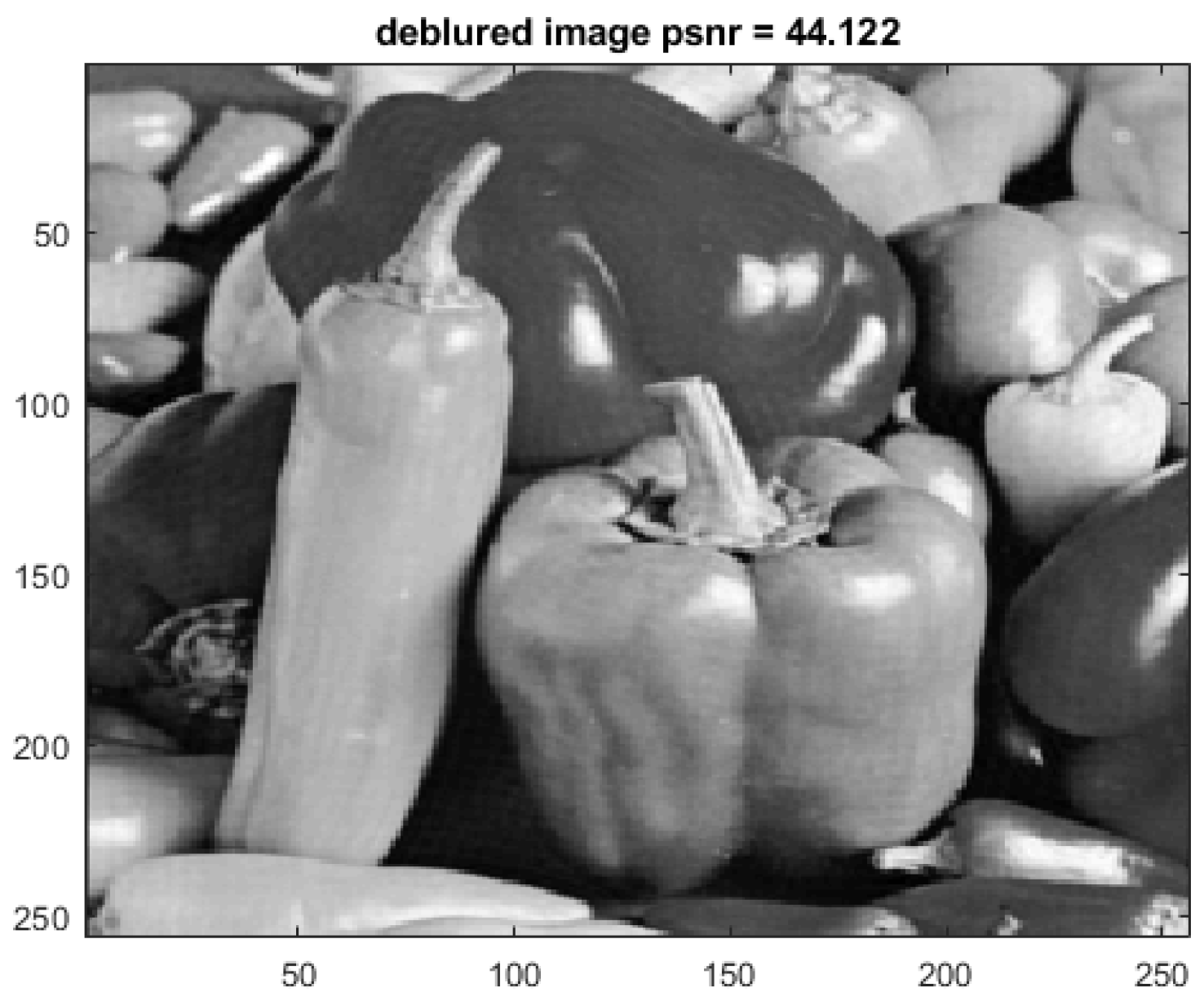
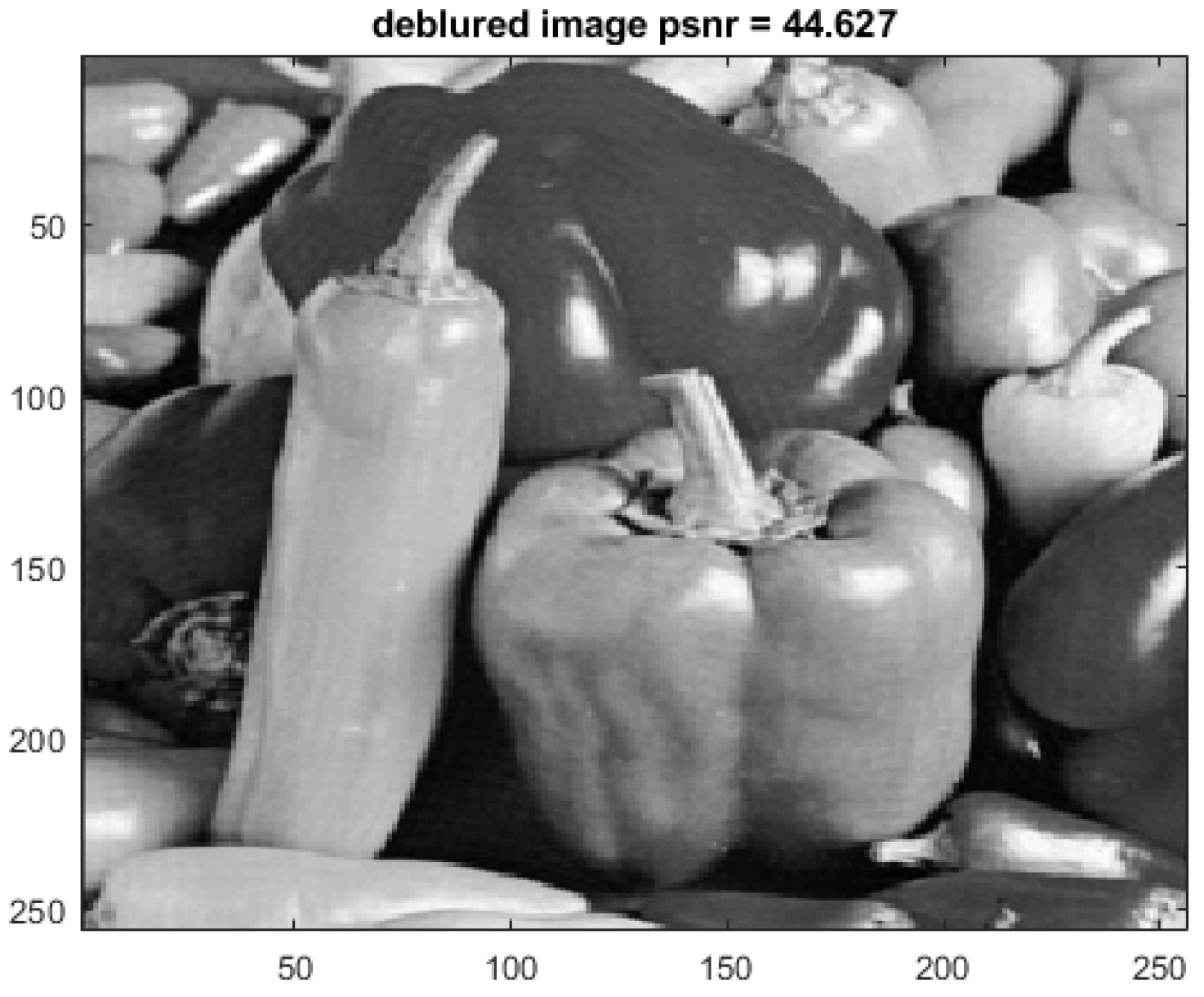
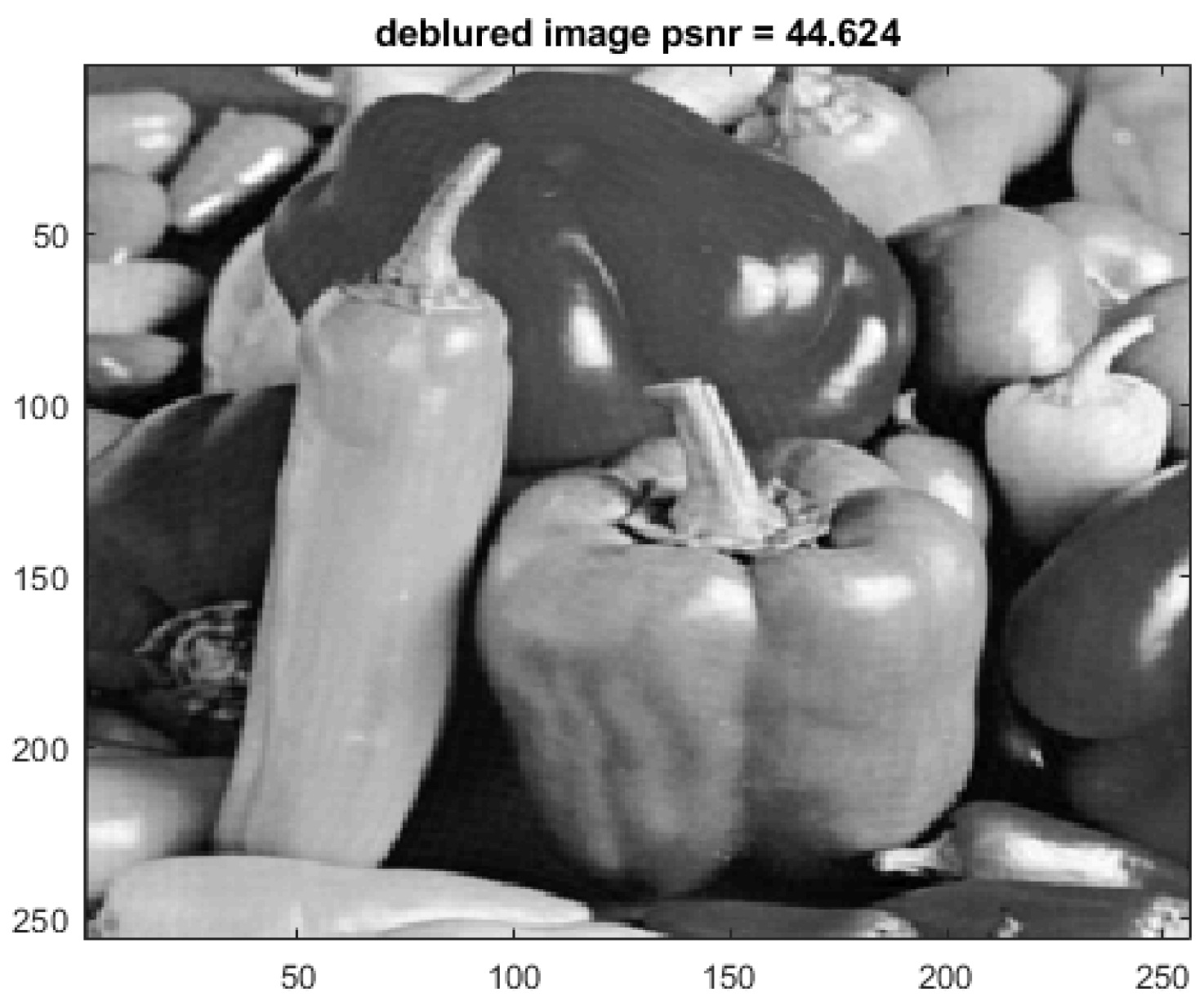
- From Table 2, we observed that the PSNR by the TFOV-based PGMRES method is almost the same as that of the ordinary TFOV-based GMRES method, but much higher than that of the TV-based method for all values of N. However, the and methods generate this better PSNR in much fewer iterations. For example, to achieve a better PSNR the method needs only 18 iterations, and the method needs only 20 iterations for . However, the NP method needs 120+ iterations to get the same PSNR. The TV-based method also takes 120+ iterations to get its lower PSNR. The same is the case for other values of N. This means that the TFOV-based FGMRES method is faster than the TFOV-based GMRES and TV-based methods.
6. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Acar, R.; Vogel, C.R. Analysis of bounded variation penalty methods for ill-posed problems. Inverse Probl. 1994, 10, 1217. [Google Scholar] [CrossRef]
- Agarwal, V.; Gribok, A.V.; Abidi, M.A. Image restoration using L1 norm penalty function. Inverse Probl. Sci. Eng. 2007, 15, 785–809. [Google Scholar] [CrossRef]
- Aujol, J.-F. Some first-order algorithms for total variation based image restoration. J. Math. Imaging Vis. 2009, 34, 307–327. [Google Scholar] [CrossRef]
- Tai, X.-C.; Lie, K.-A.; Chan, T.F.; Osher, S. Image processing based on partial differential equations. In Proceedings of the International Conference on PDE-Based Image Processing and Related Inverse Problems, CMA, Oslo, Norway, 8–12 August 2005; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Chen, D.; Chen, Y.; Xue, D. Fractional-order total variation image restoration based on primal-dual algorithm. In Abstract and Applied Analysis; Hindawi Publishing Corporation: London, UK, 2013; Volume 2013. [Google Scholar]
- Williams, B.M.; Zhang, J.; Chen, K. A new image deconvolution method with fractional regularisation. J. Algorithms Comput. 2016, 10, 265–276. [Google Scholar] [CrossRef]
- Chan, R.; Lanza, A.; Morigi, S.; Sgallari, F. An adaptive strategy for the restoration of textured images using fractional order regularization. Numer. Math. Theory Methods Appl. 2013, 6, 276–296. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, K. Variational image registration by a total fractional-order variation model. J. Comput. Phys. 2015, 293, 442–461. [Google Scholar] [CrossRef]
- Benzi, M.; Golub, G.H.; Liesen, J. Numerical solution of saddle point problems. Acta Numer. 2005, 14, 1–137. [Google Scholar] [CrossRef]
- Silvester, D.; Wathen, A. Fast iterative solution of stabilised Stokes systems. Part II: Using general block preconditioners. SIAM J. Numer. Anal. 1994, 31, 1352–1367. [Google Scholar] [CrossRef]
- Wathen, A.; Silvester, D. Fast iterative solution of stabilised Stokes systems. Part I: Using simple diagonal preconditioners. SIAM J. Numer. Anal. 1993, 30, 630–649. [Google Scholar] [CrossRef]
- Bramble, J.H.; Pasciak, J.E. A preconditioning technique for indefinite systems resulting from mixed approximations of elliptic problems. Math. Comput. 1988, 50, 1–17. [Google Scholar] [CrossRef]
- Cao, Z.-H. Positive stable block triangular preconditioners for symmetric saddle point problems. Appl. Numer. Math. 2007, 57, 899–910. [Google Scholar] [CrossRef]
- Klawonn, A. Block-triangular preconditioners for saddle point problems with a penalty term. SIAM J. Sci. Comput. 1998, 19, 172–184. [Google Scholar] [CrossRef]
- Pestana, J. On the eigenvalues and eigenvectors of block triangular preconditioned block matrices. SIAM J. Matrix Anal. Appl. 2014, 35, 517–525. [Google Scholar] [CrossRef]
- Simoncini, V. Block triangular preconditioners for symmetric saddle-point problems. Appl. Numer. Math. 2004, 49, 63–80. [Google Scholar] [CrossRef]
- Axelsson, O.; Neytcheva, M. Preconditioning methods for linear systems arising in constrained optimization problems. Numer. Linear Algebr. Appl. 2003, 10, 3–31. [Google Scholar] [CrossRef]
- Bai, Z.-Z.; Golub, G.H. Accelerated Hermitian and skew-Hermitian splitting iteration methods for saddle-point problems. IMA J. Numer. 2007, 27, 1–23. [Google Scholar] [CrossRef]
- Benzi, M.; Ng, M.K. Preconditioned iterative methods for weighted Toeplitz least squares problems. SIAM J. Matrix Anal. Appl. 2006, 27, 1106–1124. [Google Scholar] [CrossRef]
- Ng, M.K.; Pan, J. Weighted Toeplitz regularized least squares computation for image restoration. SIAM J. Sci. Comput. 2014, 36, B94–B121. [Google Scholar] [CrossRef]
- Cao, Z.-H. Block triangular Schur complement preconditioners for saddle point problems and application to the Oseen equations. Appl. Numer. 2010, 60, 193–207. [Google Scholar] [CrossRef]
- Chen, C.; Ma, C. A generalized shift-splitting preconditioner for saddle point problems. Appl. Math. Lett. 2015, 43, 49–55. [Google Scholar] [CrossRef]
- Salkuyeh, D.K.; Masoudi, M.; Hezari, D. On the generalized shift-splitting preconditioner for saddle point problems. Appl. Math. 2015, 48, 55–61. [Google Scholar] [CrossRef]
- Beik, F.P.A.; Benzi, M.; Chaparpordi, S.-H.A. On block diagonal and block triangular iterative schemes and preconditioners for stabilized saddle point problems. J. Comput. Appl. Math. 2017, 326, 15–30. [Google Scholar] [CrossRef]
- Murphy, M.F.; Golub, G.H.; Wathen, A.J. A note on preconditioning for indefinite linear systems. Siam J. Sci. Comput. 2000, 21, 1969–1972. [Google Scholar] [CrossRef]
- Benzi, M.; Golub, G.H. A preconditioner for generalized saddle point problems. SIAM J. Matrix Anal. Appl. 2004, 26, 20–41. [Google Scholar] [CrossRef]
- Saad, Y. Iterative Methods for Sparse Linear Systems; SIAM: Philadelphia, PA, USA, 2003. [Google Scholar]
- Vogel, C.R.; Oman, M.E. Fast, robust total variation-based reconstruction of noisy, blurred images. IEEE Trans. Image Process. 1998, 7, 813–824. [Google Scholar] [CrossRef] [PubMed]
- Axelsson, O. Iterative Solution Methods; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Campisi, P.; Egiazarian, K. Blind Image Deconvolution: Theory and Applications; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Groetsch, C.W.; Groetsch, C. Inverse Problems in the Mathematical Sciences; Springer: Berlin/Heidelberg, Germany, 1993; Volume 52. [Google Scholar]
- Tikhonov, A.N. Regularization of incorrectly posed problems. Sov. Math. Dokl. 1963, 4, 1624–1627. [Google Scholar]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear total variation based noise removal algorithms. Phys. D Nonlinear Phenom. 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Osher, S.; Solé, A.; Vese, L. Image decomposition and restoration using total variation minimization and the h1. Multiscale Model. Simul. 2003, 1, 349–370. [Google Scholar] [CrossRef]
- Getreuer, P. Total variation inpainting using split Bregman. Image Process. Line 2012, 2, 147–157. [Google Scholar] [CrossRef]
- Guo, W.; Qiao, L.-H. Inpainting based on total variation. In Proceedings of the 2007 International Conference on Wavelet Analysis and Pattern Recognition, Beijing, China, 2–4 November 2007; Volume 2, pp. 939–943. [Google Scholar]
- Bresson, X.; Esedoglu, S.; Vandergheynst, P.; Thiran, J.-P.; Osher, S. Fast global minimization of the active contour/snake model. J. Math. Imaging Vis. 2007, 28, 151–167. [Google Scholar] [CrossRef]
- Unger, M.; Pock, T.; Trobin, W.; Cremers, D.; Bischof, H. Tvseg-interactive total variation based image segmentation. BMVC 2008, 31, 44–46. [Google Scholar]
- Yan, H.; Zhang, J.-X.; Zhang, X. Injected infrared and visible image fusion via l_{1} decomposition model and guided filtering. IEEE Trans. Comput. Imaging 2022, 8, 162–173. [Google Scholar] [CrossRef]
- Chan, T.; Marquina, A.; Mulet, P. High-order total variation-based image restoration. SIAM J. Sci. Comput. 2000, 22, 503–516. [Google Scholar] [CrossRef]
- Steidl, G.; Didas, S.; Neumann, J. Relations between higher order TV regularization and support vector regression. In International Conference on Scale-Space Theories in Computer Vision; Springer: Berlin/Heidelberg, Germany, 2005; pp. 515–527. [Google Scholar]
- Bredies, K.; Kunisch, K.; Pock, T. Total generalized variation. SIAM J. Imaging Sci. 2010, 3, 492–526. [Google Scholar] [CrossRef]
- Zhu, W.; Chan, T. Image denoising using mean curvature of image surface. SIAM J. Imaging Sci. 2012, 5, 1–32. [Google Scholar] [CrossRef]
- Lysaker, M.; Osher, S.; Tai, X.-C. Noise removal using smoothed normals and surface fitting. IEEE Trans. Image Process. 2004, 13, 1345–1357. [Google Scholar] [CrossRef]
- Ahmad, S.; Al-Mahdi, A.M.; Ahmed, R. Two new preconditioners for mean curvature-based image deblurring problem. AIMS Math. 2021, 6, 13824–13844. [Google Scholar] [CrossRef]
- Al-Mahdi, A.; Fairag, F. Block diagonal preconditioners for an image de-blurring problem with fractional total variation. J. Phys. Conf. Ser. 2018, 1132, 012063. [Google Scholar] [CrossRef]
- Fairag, F.; Al-Mahdi, A.; Ahmad, S. Two-level method for the total fractional-order variation model in image deblurring problem. Numer. Algorithms 2020, 85, 931–950. [Google Scholar] [CrossRef]
- Sohail, A.; Bég, O.; Li, Z.; Celik, S. Physics of fractional imaging in biomedicine. Prog. Biophys. Mol. Biol. 2018, 140, 13–20. [Google Scholar] [CrossRef]
- Xu, K.-D.; Zhang, J.-X. Prescribed performance tracking control of lower-triangular systems with unknown fractional powers. Fractal Fract. 2023, 7, 594. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, X.; Boutat, D.; Shi, P. Quadratic admissibility for a class of lti uncertain singular fractional-order systems with 0 < α < 2. Fractal Fract. 2022, 7, 1. [Google Scholar]
- Zhang, J.; Chen, K. A total fractional-order variation model for image restoration with nonhomogeneous boundary conditions and its numerical solution. SIAM J. Imaging Sci. 2015, 8, 2487–2518. [Google Scholar] [CrossRef]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: Hoboken, NJ, USA, 1993. [Google Scholar]
- Oldham, K.; Spanier, J. The Fractional Calculus Theory and Applications of Differentiation and Integration to Arbitrary Order; Elsevier: Amsterdam, The Netherlands, 1974; Volume 111. [Google Scholar]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Academic Press: Cambridge, MA, USA, 1998; Volume 198. [Google Scholar]
- Chan, T.F.; Golub, G.H.; Mulet, P. A nonlinear primal-dual method for total variation-based image restoration. SIAM J. Sci. 1999, 20, 1964–1977. [Google Scholar] [CrossRef]
- Meerschaert, M.M.; Tadjeran, C. Finite difference approximations for fractional advection–dispersion flow equations. J. Comput. Appl. Math. 2004, 172, 65–77. [Google Scholar] [CrossRef]
- Meerschaert, M.M.; Tadjeran, C. Finite difference approximations for two-sided space-fractional partial differential equations. Appl. Numer. Math. 2006, 56, 80–90. [Google Scholar] [CrossRef]
- Wang, H.; Du, N. Fast solution methods for space-fractional diffusion equations. J. Comput. Appl. Math. 2014, 255, 376–383. [Google Scholar] [CrossRef]
- Strang, G. A proposal for Toeplitz matrix calculations. Stud. Appl. Math. 1986, 74, 171–176. [Google Scholar] [CrossRef]
- Olkin, J.A. Linear and Nonlinear Deconvolution Problems (Optimization). Ph.D. Thesis, Rice University, Houston, TX, USA, 1986. [Google Scholar]
- Chan, T.F.; Olkin, J.A. Circulant preconditioners for Toeplitz-block matrices. Numer. Algorithms 1994, 6, 89–101. [Google Scholar] [CrossRef]
- Chan, R.H.; Ng, K.-P. Toeplitz preconditioners for Hermitian Toeplitz systems. Linear Algebra Appl. 1993, 190, 181–208. [Google Scholar] [CrossRef]
- Lin, F.-R. Preconditioners for block Toeplitz systems based on circulant preconditioners. Numer. Algorithms 2001, 26, 365–379. [Google Scholar] [CrossRef]
- Chan, R.H. Toeplitz preconditioners for Toeplitz systems with nonnegative generating functions. IMA J. Numer. Anal. 1991, 11, 333–345. [Google Scholar] [CrossRef]
- Serra, S. Preconditioning strategies for asymptotically ill-conditioned block Toeplitz systems. BIT Numer. Math. 1994, 34, 579–594. [Google Scholar] [CrossRef]
- Lin, F.-R.; Wang, C.-X. BTTB preconditioners for BTTB systems. Numer. Algorithms 2012, 60, 153–167. [Google Scholar] [CrossRef]
- Chan, R.H.; Strang, G. Toeplitz equations by conjugate gradients with circulant preconditioner. SIAM J. Sci. Stat. 1989, 10, 104–119. [Google Scholar] [CrossRef]
- Chan, R.H.; Yeung, M.-C. Circulant preconditioners constructed from kernels. SIAM J. Numer. Anal. 1992, 29, 1093–1103. [Google Scholar] [CrossRef]
- Chan, T.F. An optimal circulant preconditioner for Toeplitz systems. SIAM J. Sci. Stat. Comput. 1988, 9, 766–771. [Google Scholar] [CrossRef]
- Davis, P.J. Circulant Matrices; American Mathematical Soc.: New York, NY, USA, 2012. [Google Scholar]
- Chowdhury, M.R.; Qin, J.; Lou, Y. Non-blind and blind deconvolution under Poisson noise using fractional-order total variation. J. Math. Imaging Vis. 2020, 62, 1238–1255. [Google Scholar] [CrossRef]







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Iterations | CPU-Time | |||||||
|---|---|---|---|---|---|---|---|---|---|
| N | NP | NP | |||||||
| 32 | 1.3 | 1 | 53 | 30 | 32 | 3.44 | 1.88 | 1.98 | |
| 64 | 1.8 | 0.1 | 301 | 166 | 194 | 39.71 | 20.97 | 20.55 | |
| 128 | 1.6 | 0.01 | 178 | 68 | 91 | 76.64 | 35.86 | 38.22 | |
| Parameters | Iterations | Deblurred PSNR | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| N | TV () | NP | TV () | NP | |||||||
| 64 | 1.6 | 1 | 20 | 18 | 47.2230 | 48.6422 | 49.0131 | 48.9233 | |||
| 128 | 1.8 | 1 | 40 | 22 | 45.2243 | 46.0352 | 46.8526 | 46.8957 | |||
| 256 | 1.9 | 1 | 60 | 38 | 40.3331 | 44.1220 | 44.6277 | 44.6241 | |||
| Parameters | Iterations | Deblurred PSNR | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| N | NFOV | NP | NFOV | NP | |||||||
| 64 | 1.7 | 1 | 41 | 26 | 25.9869 | 26.5625 | 26.7861 | 26.8283 | |||
| 128 | 1.9 | 1 | 65 | 45 | 24.1417 | 25.1908 | 25.4312 | 25.6952 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Mahdi, A.M. Preconditioning Technique for an Image Deblurring Problem with the Total Fractional-Order Variation Model. Math. Comput. Appl. 2023, 28, 97. https://doi.org/10.3390/mca28050097
Al-Mahdi AM. Preconditioning Technique for an Image Deblurring Problem with the Total Fractional-Order Variation Model. Mathematical and Computational Applications. 2023; 28(5):97. https://doi.org/10.3390/mca28050097
Chicago/Turabian StyleAl-Mahdi, Adel M. 2023. "Preconditioning Technique for an Image Deblurring Problem with the Total Fractional-Order Variation Model" Mathematical and Computational Applications 28, no. 5: 97. https://doi.org/10.3390/mca28050097