1. Introduction
The technique of constructing fractal interpolation functions (FIFs) initiated by Barnsley [
1] can produce nonsmooth or smooth interpolants [
2], where the graph of an FIF is an attractor of a suitable IFS. This technique involves a free parameter to control the variation of ordinates so that it provides flexibility to generate a range of interpolants from smooth to nowhere differentiable on a compact domain. A class of spline interpolants can be generalized using the class of smooth fractal interpolants. Implementing the idea of spline FIFs given by Barnsley and Harrington [
2], cubic spline FIFs with general boundary conditions were introduced by Chand and Kapoor [
3]. Since the classical splines are used in the problem of shape-preserving interpolation, it is natural to think that their fractal generalization can also do the same. Chand et al. in [
4] introduced rational cubic FIFs, which can preserve the fundamental features of univariate Hermite data.
In the literature, univariate FIFs are studied more than fractal interpolation surfaces (FISs). It may be the case that the graph of a linear FIS is not continuous [
5], whereas the graph of a linear fractal interpolation function (one-dimensional) is always continuous [
1]. Massopust [
6] proposed the construction of FISs on triangular domains. He used coplanar interpolation points on the boundary of the domain for constructing the FISs. Geronimo and Hardin in [
7] presented the constructions of FISs on flexible domains. Zhao [
8] generalized that construction using barycentric co-ordinates. In [
9,
10], the researchers generated FISs on rectangular grids for collinear interpolation points on the boundary. The construction of an FIS given in [
10] was improved in [
9]. A new construction for FISs for every set of data and a generalization to higher dimensions is given in [
11]. FISs with recurrent IFSs were constructed in [
12,
13]. Navascués et al., in [
14], analyzed the spanning properties of the fractal functions on the rectangle. Chand et al., in [
15], investigated FISs that lie above a plane. Fractal surfaces have been found to be effective in scientific applications, such as metallurgy, geology, computer graphics, physics, brain electrical activity, and image processing, e.g., [
16,
17,
18,
19].
The idea of a zipper, which generalizes the concept of an IFS using a binary vector named signature, was given by Aseev et al. in [
20]. Tetenov and collaborators studied many interesting topological and structural properties of zippers related to dendrites and self-similar continua in [
21,
22,
23,
24,
25]. Chand et al. in [
26] generated affine zipper FIFs and examined their range-restricted properties. Recently, the approximation features of smooth zipper fractal functions have been studied in [
27]. In this article, we construct one-dimensional and two-dimensional continuously differentiable zipper fractal interpolants. To construct a class of continuously differentiable zipper fractal surface interpolants, we use the technique given in [
28], where the horizontal scalings in the
x and
y directions can be negative. This technique of constructing surface interpolants using the network of univariate boundary curves and blending functions is beneficial in the design environment. Since the generated surface inherits all the properties of the network of boundary curves, see [
29], we generate convexity-preserving surface interpolants using some restriction on the zipper IFS parameters. Our scheme can produce a wide variety of surface interpolants due to the presence of a signature, scaling factors, and shape parameters. It is more convenient to model smooth convex bivariate interpolants in shape abstraction and modeling, computer-aided design, biomedical instruments, object recognition, computer graphics, reverse engineering material science, and metallurgy to capture the irregularities associated with the partial derivatives of the surface interpolants.
2. Basics of Fractal Interpolation
We shall begin with the basics of fractal interpolation, and fractal perturbation of a function through
-fractal functions. The details can be found in the references [
1,
2,
30].
Consider a finite interpolation dataset
, where
and
. Let
and
for
. Let
be homeomorphisms such that for all
and for some
,
Define
continuous maps
such that
for all
,
, and for some
. Now construct the elementary functions
Theorem 1 ([
1]).
The iterated function system (IFS) has a unique attractor , which is the graph of a continuous function satisfying for all i. Furthermore, if is endowed with the uniform metric, and the Read–Bajraktarević (RB) operator is defined by , , , then is the unique fixed point of . The function
in the above theorem is called an FIF corresponding to the interpolation dataset
. The popular fractal interpolation in theory and applications is taken from the following IFS:
Here,
is called the vertical scaling factor corresponding to the map
. The corresponding fractal function
satisfies
Let
be a collection of all
k-times continuously differentiable real-valued functions on
I. The existence of differentiable fractal functions or spline FIFs is given in the following:
Theorem 2 ([
2]).
Let be a given dataset, where . Suppose that , where is continuous for . Suppose for some integer . Let , represents the derivative of then the IFS determines a spline FIF , and is the FIF determined by =. If
’s are taken as rational functions, one can obtain rational fractal splines, see for instance [
4,
31].
The concept of FIFs can be used to associate a family of continuous fractal functions with a prescribed function
(see [
30]). For this procedure, consider a partition
of
I with increasing abscissae. Suppose that
satisfies
and
. For
, we construct
, and then the corresponding RB-operator provides a fixed point denoted by
, where
. The associate fractal function
is called the
-fractal function corresponding to
f and it satisfies the self-referential equation:
This model is used to construct a fractal perturbation of any standard function in numerical analysis and approximation theory.
For a -fractal perturbation function from a germ f in the same space, we proceed as follows: Let , and , . In order to construct corresponding to f, it is sufficient to find the conditions on the base function b according to Theorem 2.
Theorem 3 ([
32]).
Let , and be an arbitrary partition of I. Suppose for all . Further, assume that the base function b obeysThen, the corresponding fractal function is p-times differentiable, and for ; In the next section, we will take f as a zipper rational cubic spline, and then we will perturb it to construct the desired zipper fractal rational cubic spline as Since it is difficult for a zipper fractal spline constructed using a single base function to preserve the shape of the data, we will use a family of base functions satisfying the conditions given in Theorem 3 to perturb a zipper rational cubic spline.
4. Convexity Preserving Zipper RCS and RCS ZFIF
For a convex Hermite dataset , where , first we will derive sufficient conditions on the shape parameters so that the corresponding zipper rational cubic spline becomes convex on I. Then, we will give sufficient conditions on the zipper IFS parameters so that the proposed RCS ZFIF becomes convex on I. Since the first derivative of the proposed RCS ZFIF can be nowhere differentiable on I, to prove the convexity of the RCS ZFIF, we will show that its right-handed double derivative or the left-handed double derivative on each point of the interpolating interval exists and is non-negative.
Proposition 1 ([
34]).
For a continuous function g on and for each , if one of the one-sided derivatives or exists, and is non-negative (can be ), then the continuous function g is monotonically increasing on I. We use the above proposition for the first derivative of the proposed interpolant to preserve the convexity feature of the data.
Theorem 5. Let be a convex Hermite dataset, where . For a fixed signature , if the shape parameters are chosen such thatthen the corresponding zipper RCS will be convex on I. Proof. From the construction (
5),
may be discontinuous at the internal grids. In addition,
and
exist but may be
. Therefore, to prove
is convex, it is enough to show that
for each
. Let the shape parameters satisfy the assumptions given in the statement. Now, differentiating twice
given in (
5), we obtain
where
If
, then
, and the given assumptions on the shape parameters confirm that
and
for each
. Therefore,
for all
. Similarly, if
, then
, and the given assumptions on the shape parameters confirm that
and
for each
. Therefore,
for all
and for each
. Hence,
is convex. □
Remark 1. When for all , the sufficient conditions given in Theorem 5 reduce to sufficient conditions:for a classical rational cubic interpolant defined in [33] to be convex for given convex interpolation data. Now, using the convexity of
, we will show that
is also convex if the scaling and shape parameters are restricted suitably. We have
where
Theorem 6. Let be a convex Hermite dataset, where . Let be fixed and the shape parameters be chosen asIf we choose scaling factors such thatwhere and , , then the corresponding -RCS ZFIF will be convex on I. Proof. From the construction (
5), it is obvious that the second derivative of
exists on each
,
, and also,
and
exist. However, at the endpoints of the subintervals, it can happen that
. Therefore, using the given assumptions on the shape parameters in Theorem 5, we have
. Thus,
. For each
,
is infinitely differentiable on
I.
Let the zipper IFS parameters satisfy the assumptions given in the statement. To prove
is convex, it is enough to prove that
or
exists and is non-negative (possibly
) for all
(see, Proposition 1). Let
. From (
9), informally, we can write
First, we will prove that the assumptions on parameters imply
and
.
Case 1: Let and .
Taking
and
in (
11), we obtain
Now, . Thus, implies
Taking
and
, we have
Similarly, we can obtain if .
We have
Using the steps from Case 1 and Case 2, we can conclude that
and
if
and
.
Thus, we have
Now, we are moving to the other knots. For a fixed
, if
, then (
11) gives
Now, using
and
, we have
If
, we have
Similarly, we can obtain
using the assumptions on the zipper IFS parameters. Hence, the condition
Similarly,
Therefore, using the given assumptions on the zipper IFS parameters, we have
Now, we are moving to the next iteration. If
, we have
If
, we have
Using a similar procedure, we have
, provided the parameters satisfy the given assumptions. Similarly,
and
exist, and are non-negative on the new points generated in the next iteration. Since
is determined iteratively, we can conclude that
is convex. □
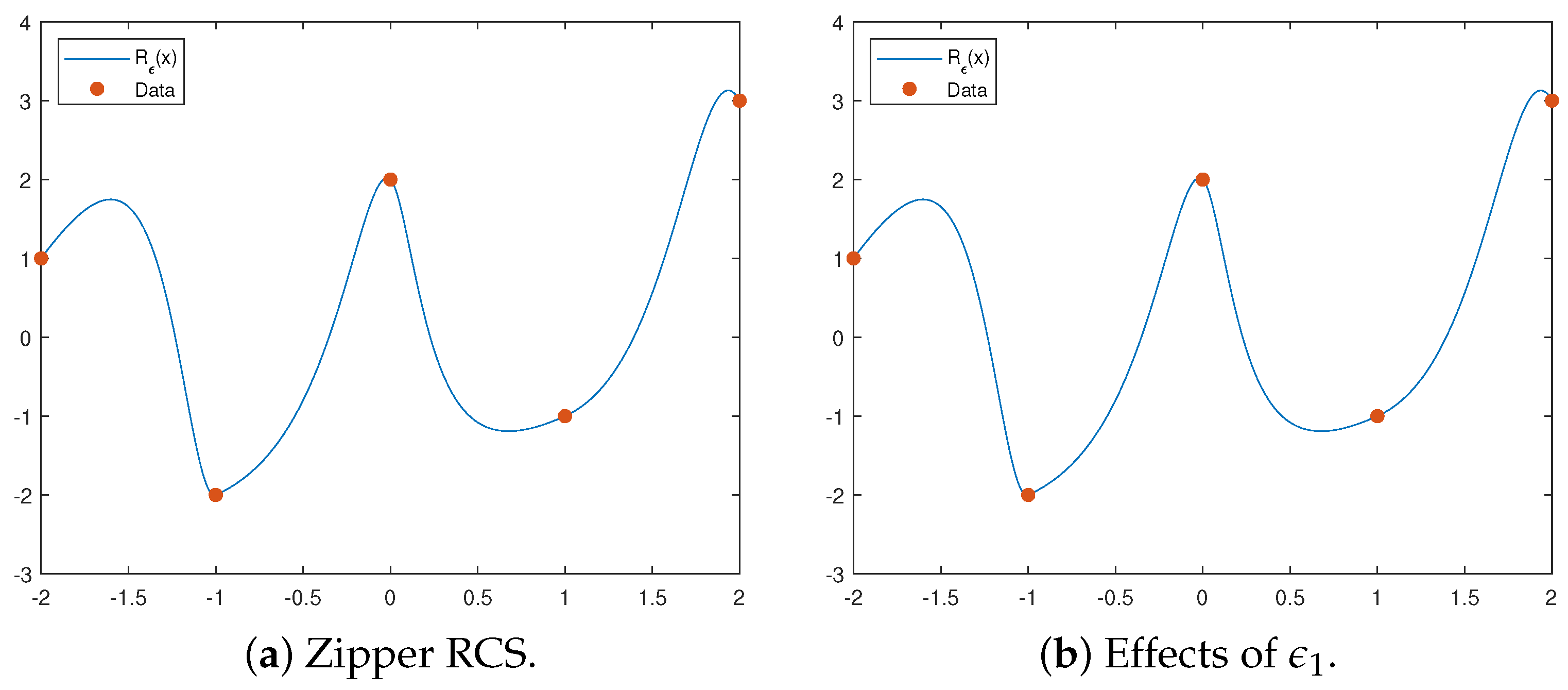
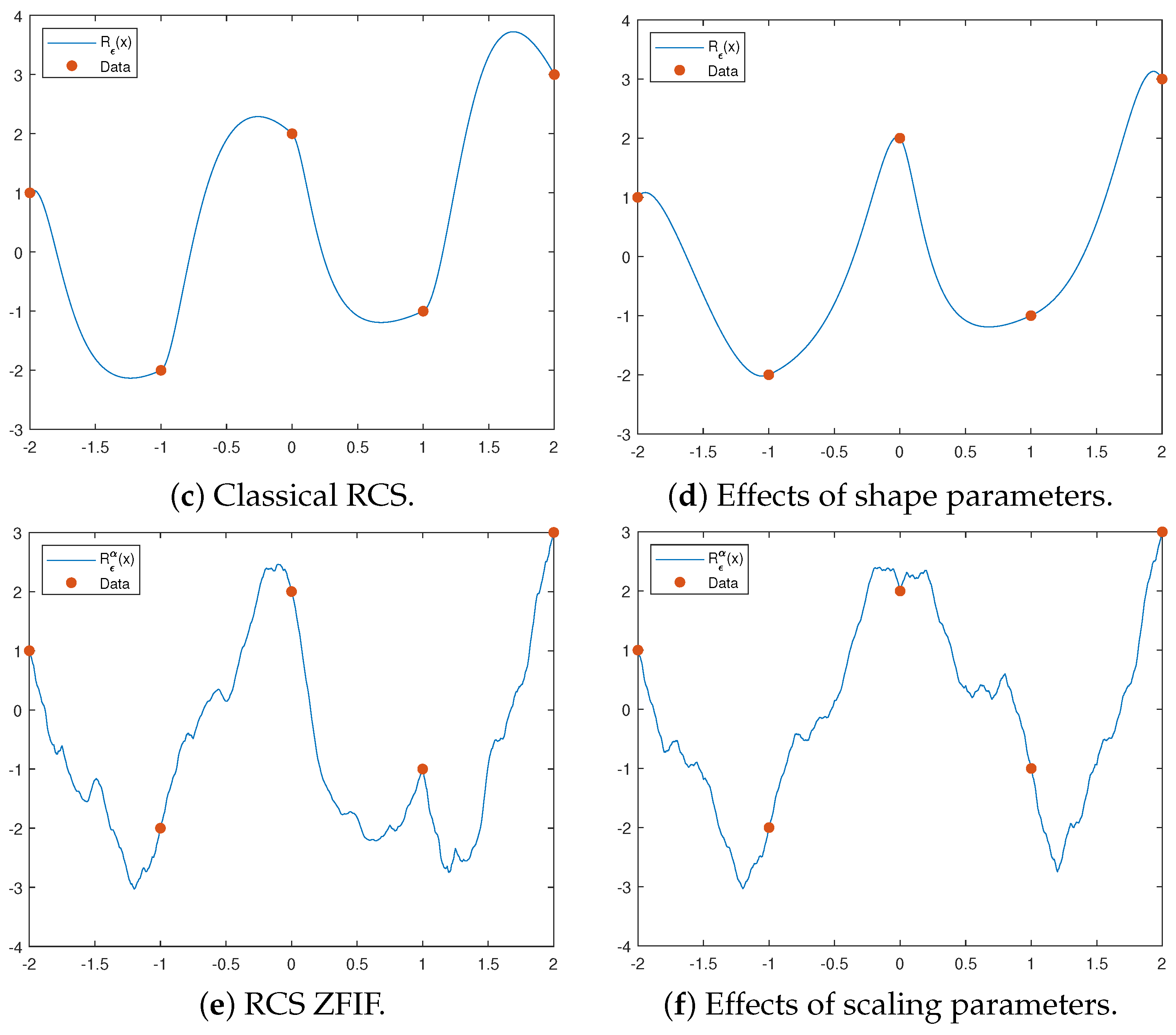
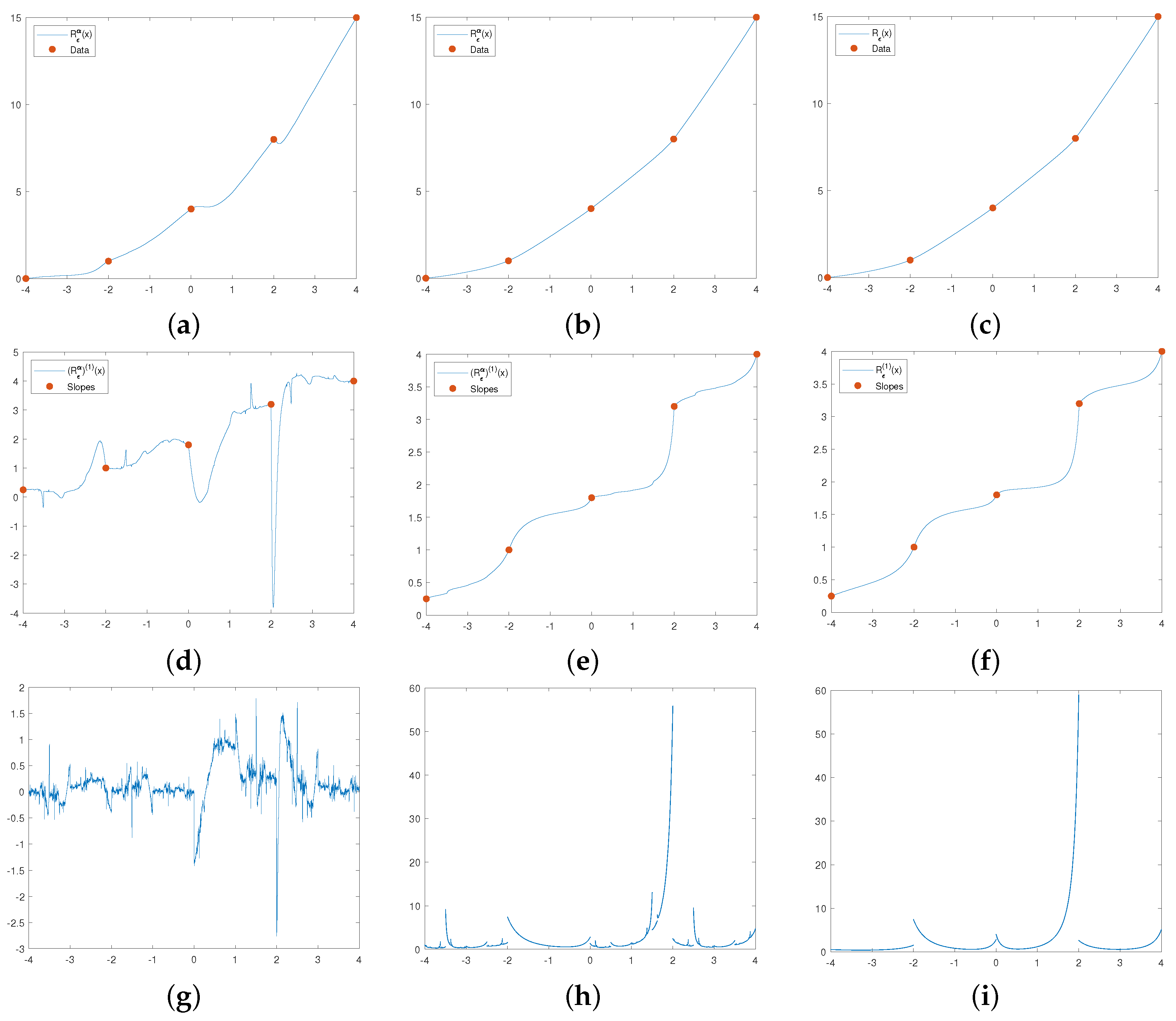
Example 2. Consider a univariate Hermite interpolation datasetClearly, the given Hermite dataset is convex and satisfies . Using the parameters given in Table 2 and signature , we plotted the proposed interpolants in Figure 2a–c. We chose random parameters for plotting Figure 2a, and the corresponding RCS ZFIF is not convex, which can be seen from its first derivative plotted in Figure 2d, as it is not monotonically increasing, or it can be seen from its double derivative plotted in Figure 2g, as it takes some negative values. We used sufficient conditions provided in Theorems 5 and 6 to plot the RCS ZFIF in Figure 2b and zipper RCS in Figure 2c, respectively. From their figures or the plot of their second derivatives in Figure 2h,i, it can be observed that they preserve the convexity of the given data. As the magnitude of each scaling factor is close to zero, the difference between the RCS ZFIF plotted in Figure 2b and zipper RCS plotted in Figure 2c cannot be seen much from their plots, but it can be easily observed from their second derivatives. In addition, one can observe that the second derivative of the RCS ZFIF plotted in Figure 2h does not exist on more points than the second derivative of the zipper RCS plotted in Figure 2i. 5. Construction of Bicubic Partially Blended RCZFIS
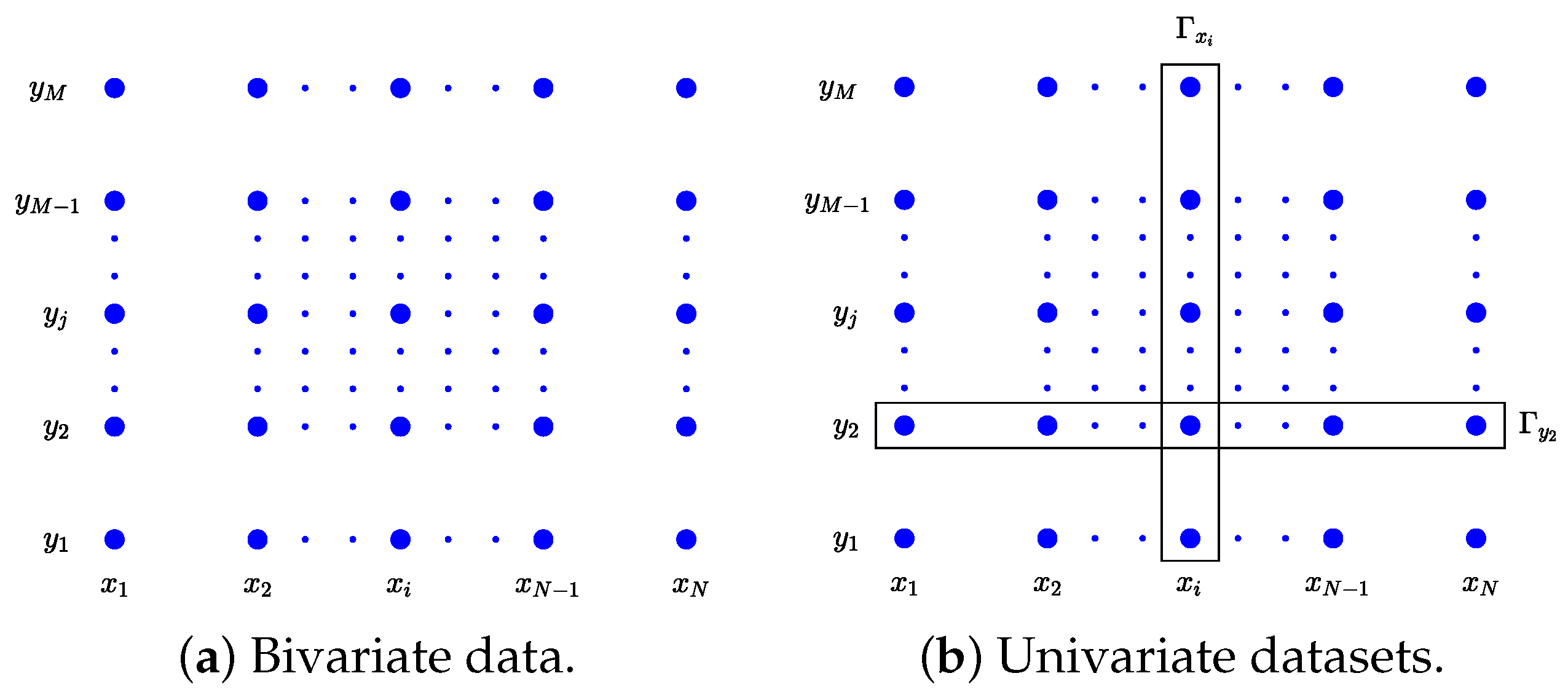
In this section, we will generate zipper fractal interpolation surfaces for given Hermite bivariate data
, where
,
, and
is
x-partial and
is
y-partial at the point
. First, we split the given Hermite bivariate or surface data into univariate Hermite datasets along the
x-axis and the
y-axis, i.e., along each
j-th grid line parallel to the
x-axis and along each
i-th grid line parallel to the
y-axis, see
Figure 3. Thus, we have
M number of Hermite datasets
along the
x-axis and
N number of Hermite datasets
along the
y-axis. Then, we construct RCS ZFIFs using these univariate Hermite datasets. We generate a zipper fractal interpolation surface with the Coons patch technique [
28] using these RCS ZFIFs as the boundary curves and blending them with two cubic blending functions. Here, we obtain the advantage of using signature vectors as we can obtain
different zipper fractal interpolation surfaces by varying the values of signature vectors only.
For
and
, denote
,
,
,
,
,
,
,
,
,
,
, and
. For fixed
, consider the univariate Hermite data
. Let the signature corresponding to the dataset
denoted by
be fixed. For each
, let
be a contractive homeomorphism such that
satisfying
and
,
be a scaling factor such that
,
and
be the shape parameters,
, and
be a base function. Using these notations in
Section 3, the RCS ZFIF corresponding to the univariate Hermite data
denoted by
can be written as
where
is the univariate Hermite zipper RCS that interpolates the data
. Thus,
By fixing the signature
for each univariate dataset
,
, we can generate a RCS ZFIF, which interpolates
, i.e., we can construct
M number of RCS ZFIFs along the
x-axis.
Similarly, we construct RCS ZFIFs along the
y-axis. For fixed
, consider the univariate Hermite data
. Let the signature corresponding to the data
denoted by
be fixed. For each
, let
be a contractive homeomorphism such that
satisfying
and
,
be a scaling factor such that
,
and
be the shape parameters,
, and
be a base function. Now, the RCS ZFIF corresponding to the univariate Hermite data
denoted by
can be written as
where
is the univariate Hermite zipper RCS that interpolates the data
. Thus,
Now, for the boundary of subrectangle
, we have four curves (two along the
i-th and
-th grid lines and two along the
j-th and
-th grid lines)
,
,
, and
. Using the transfinite interpolation method via blending functions, we can define the surface
of the form:
where
In (
24),
and
each generates a surface using two boundary curves by blending these curves with cubic functions.
uses
and
, and
uses another two curves
and
. Since we added the corners twice, we used
. These smooth cubic functions
and
, satisfying
are called blending functions as they blend four different univariate functions together on the boundary to produce a well-defined surface.
Theorem 7. Let be a given bivariate Hermite dataset. The bivariate function defined in (24) has the following properties: - (i)
;
- (ii)
interpolates the given bivariate data, i.e., - (iii)
If the given bivariate data is taken from a function , then bivariate interpolant converges uniformly to Ψ as and .
Since boundary curves satisfying (
20)–(
23) and blending functions satisfying (
25) are continuously differentiable functions, it is easy to observe that the generated surface
holds properties (i) and (ii) given in Theorem 7. Part (iii) of this theorem can be proved in a similar manner as described in [
15]. We call the bivariate interpolant
a rational cubic zipper fractal interpolation surface (RCZFIS). For each
, we can generate
number of different RCS ZFIFs corresponding to the univariate data
by varying the signature vector
only. Therefore, we can construct
number of RCS ZFIFs along the
x-axis. Similarly, we can construct
number of RCS ZFIFs along the
y-axis. Therefore, we can construct
number of different RCZFISs for the given bivariate data
by varying the signature vectors only, where all the other parameters are the same. The proposed class of partially blended rational cubic zipper fractal interpolation surfaces generalizes the existing class of partially blended rational cubic fractal interpolation surfaces and partially blended rational cubic interpolation surfaces. If we choose all the scaling factors to be zero, then the bicubic partially blended rational cubic ZFIS (
24) reduces to the bicubic partially blended zipper rational cubic surface, and we denote it
.
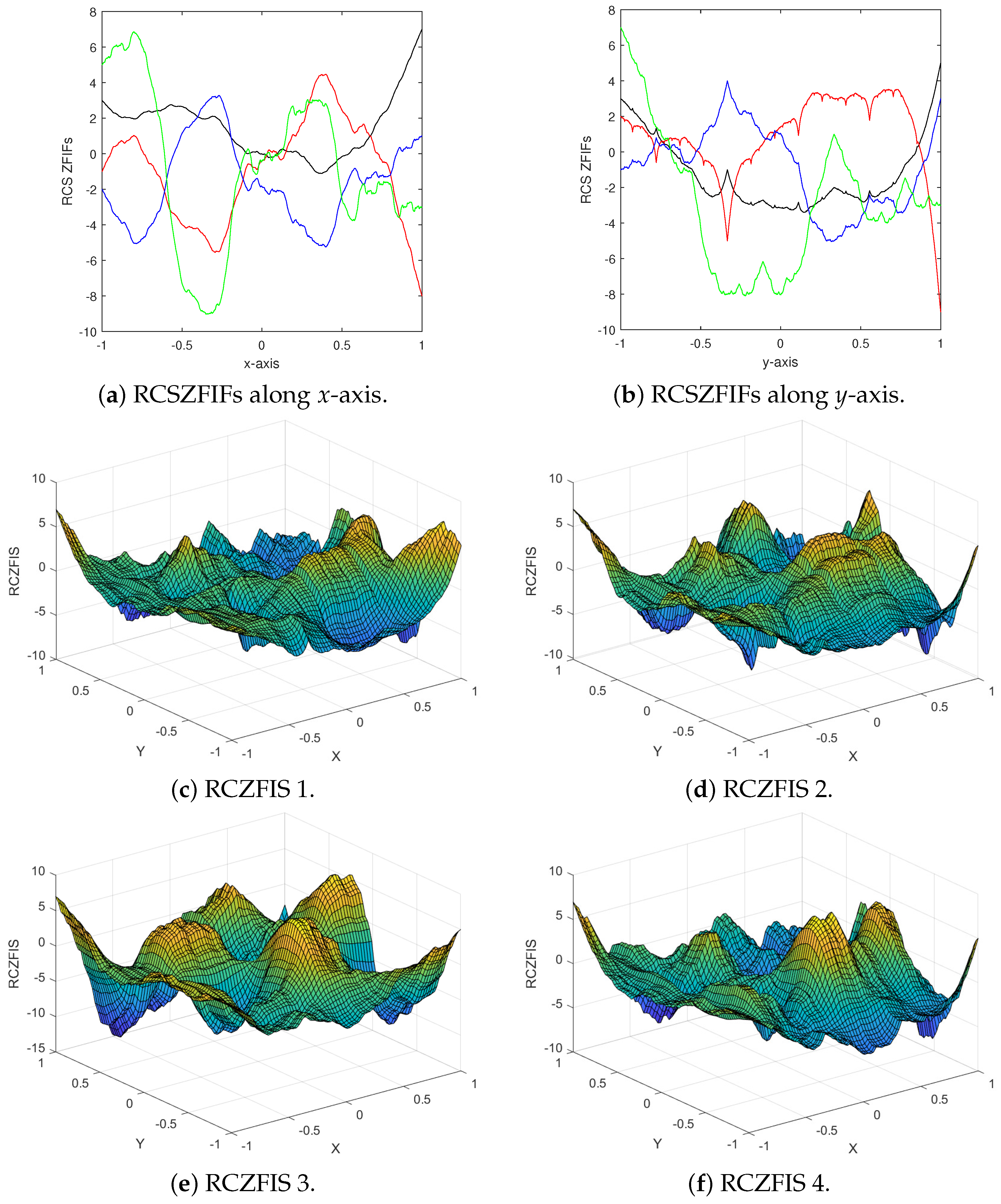
Example 3. For the Hermite surface interpolation data points of the form given in Table 3, we constructed different RCZFISs using the different signature vectors given in Table 4 and the fixed shape parameters and scaling function vectors given in Table 5. In Figure 4a,b, we plotted the RCS ZFIFs along the x-axis and the y-axis. We used them to plot RCZFIS 1 given in Figure 4c. Then, using different signature vectors only, we plotted RCZFIS 2, RCZFIS 3, and RCZFIS 4 in Figure 4d–f, respectively. One can observe that we obtain a different surface when we change the signature. Since for the given surface data of points, we have choices to choose a signature vector, we can generate 1024 different RCZFISs by changing the values of signature vectors with the fixed sets of shape parameters and scaling functions. 6. Convexity-Preserving RCZFIS
In this section, we will generate convex RCZFISs for a given convex bivariate dataset. Casciola and Romani [
29] observed that the bicubic partially blended surface inherits all the properties of the network of boundary curves.
Let
be a convex surface data, where
and
Therefore, the univariate Hermite datasets
for all
and
for all
are also convex. Now, with these notations in Theorem 6, we obtain the following results:
- (i)
For fixed
,
is convex if
where
- (ii)
For fixed
,
is convex if
where
Thus, for the given convex surface data, we can restrict the parameters so that each RCS ZFIF that we used to generate the surface RCZFIS is convex. Hence, using [
29], we have the following theorem:
Theorem 8. For given convex surface data , if the shape parameter vectors and the scaling vectors satisfy (26) and (27) for each and , then the corresponding bicubic partially blended RCZFIS will be convex on . Numerical algorithm for generating a convex RCZFIS for given convex surface data :
Step 1: Split into convex univariate Hermite datasets along the x-axis and y-axis.
Step 2: Fix the values of signature vectors.
Step 3: Choose the shape parameters and scaling factors as restricted in (
26) and (
27).
Step 4: Construct the convexity-preserving univariate RCS ZFIFs along these univariate datasets with the parameters chosen in Step 2 and Step 3.
Step 5: Construct a RCZFIS using these convex RCS ZFIFs and cubic blending functions
and
in (
24).
The RCZFIS constructed in Step 5 is a convex surface interpolating the given convex data .
Remark 2. One can construct concave RCZFISs for given concave surface data with a similar procedure.
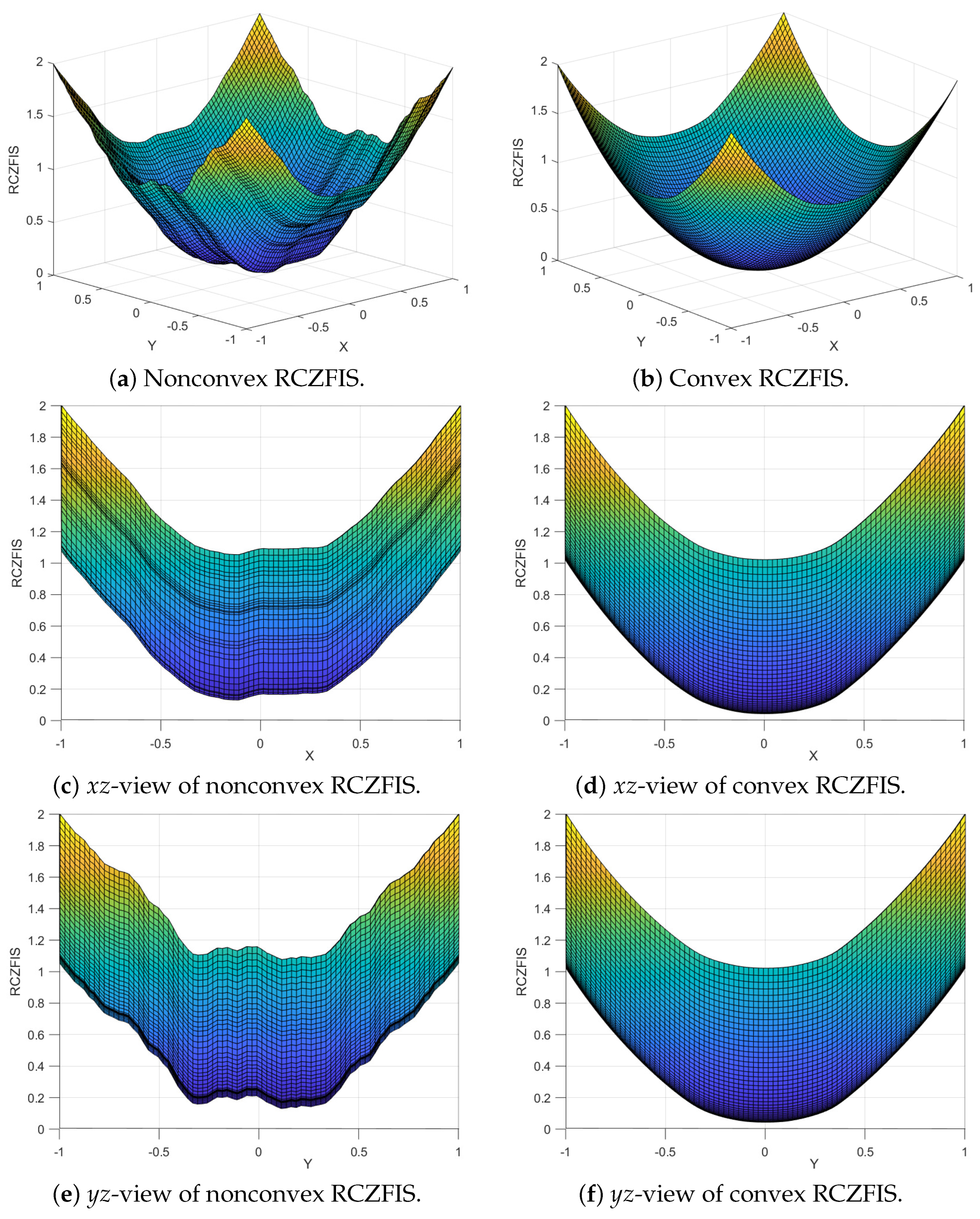
Example 4. We generated convex Hermite surface data on from a bivariate function . We plotted Figure 5a,b using the zipper IFSs parameters given in Table 6. For Figure 5a, we chose random shape parameters and scaling functions, and the corresponding RCZFIS is not convex on , which we can observe from its -view and -view plotted in Figure 5c,e, respectively. However, when we restrict the shape parameters and scaling function as prescribed in Theorem 8, the corresponding RCZFIS plotted in Figure 5b becomes convex on , which one can examine from its -view and -view plotted in Figure 5d,f, respectively. 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}